Результат интеллектуальной деятельности: АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ИЗМЕРЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ХАРАКТЕРИСТИК ВЕКТОРНОГО ЗВУКОВОГО ПОЛЯ
Вид РИД
Изобретение
Изобретение относится к гидроакустике и может быть использовано для обнаружения и пеленгования движущегося подводного источника звука преимущественно в мелком море с помощью комплекса гидроакустических приемников.
Общеизвестно, что комбинированный гидроакустический приемник, включающий приемник давления и приемник колебательной скорости (далее - КП), более информативен и предпочтителен в системах контроля гидроакустических полей и обнаружения подводных источников слабых сигналов в сравнении с обычными приемниками давления (гидрофонами). Также известно, что кроме решения задачи обнаружения, КП может определять текущее угловое положение источника шума в горизонтальной плоскости и для этих целей разработаны соответствующие технические средства (Гордиенко В.А., Некрасов В.Н. Создание перспективных гидроакустических средств нового поколения для измерения характеристик подводного шума кораблей и поиска источников повышенного подводного шумоизлучения, основанных на векторно-фазовых методах // Труды конференции «Военное кораблестроение - ВОКОР-2013» // г. С-Петербург, 2013 г.).
Известно, что звуковое поле подводного движущегося источника стратифицировано по глубине волновода, что особенно проявляется в условиях мелкого моря, а наиболее информативными параметрами обнаружения движущегося подводного источника шумовых сигналов являются дифференциальные характеристики вектора потока мощности, измеряемые с использованием КП (Шуров В.А., Ляшков А.С., Черкасов А.В. Вихри вектора акустической интенсивности в интерференционных полях мелкого моря // Подводные исследования и робототехника. 2012, №1 (13), с. 4-12. Владивосток, Изд. «Дальнаука» ДВО РАН). Максимальное значение этих параметров наблюдается в зонах повышенной освещенности, положение которых динамически изменяется при движении источника шума. Поиск зон повышенной освещенности в звуковом поле и реализация позиционирования в них КП в ходе накопления данных обеспечивают значительное повышение помехоустойчивости обнаружителя и могут быть реализованы при отслеживании динамики звукового поля измерителем дифференциальных характеристик на борту движущегося подводного носителя.
Также известен КП, применяемый для приема слабых сигналов и размещаемый на движущемся подводном устройстве в условиях шумов обтекания и вибраций (патент RU №2533323, МПК Н04R 1/44, опубл. 20.11.2014 г.). КП размещают на подвесе в специальной звукопрозрачной рамке, выполненной в виде замкнутого линейного элемента с распределенной по длине массой, закрепленного в двух точках на звукопрозрачной рамке и в двух точках на векторном приемнике.
Известен также подводный планер (патент RU №106880, МПК G01S 15/02, B63G 8/00, опубл. 27.07.2011 г.), состоящий из цилиндрического корпуса с носовым отсеком, несущих поверхностей, горизонтального киля, установленных в корпусе электронного блока управления с системой спутниковой навигации, записи и передачи информации, аккумуляторных батарей, систем связи и управления плавучестью, выполненной с возможностью придавать планеру положительную плавучесть близкую к нулевой, набора датчиков, включающих гирокомпас, инклинометр и датчик глубины, при этом носовой отсек корпуса выполнен сообщающимся с внешней средой и представляет собой звукопрозрачный обтекатель, внутри которого установлена двухзвенная подвеска, состоящая из звукопрозрачной рамки, внутри которой расположен КП, и лонжей из эластичных и ограничительных нитей, соединяющих КП с рамкой, рамку с корпусом и КП с корпусом посредством ограничительной нити соединенной с натяжителем, установленным внутри корпуса.
Данное техническое решение является наиболее близким по технической сущности к заявляемому автономному необитаемому подводному аппарату (далее - АНПА) и выбрано за прототип.
Векторные характеристики в различных зонах звукового поля можно измерять при размещении КП на подводном планере - подводном аппарате способном планировать в наклонном положении без использования движителей, снабженного системой измерений и записи характеристик векторного акустического поля. Полученные записи после завершения процесса измерений передаются в пункт обработки через спутник либо по другим каналам связи.
Однако известный подводный планер имеет недостатки, которые заключаются в низком качестве дифференцирования по вертикальной координате за счет влияния корпуса планера на характеристики КП и малом времени накопления данных при пространственном дифференцировании вертикальной компоненты информативного параметра за счет нерегулируемого пересечения планером зон повышенной освещенности. Кроме того, наклонное движение планера при изменении его глубины ведет к существенному горизонтальному сносу относительно точки старта с координатами, определенными спутниковой навигационной системой, что ведет к отсутствию точной информации о координатах планера в момент обнаружения объекта и уменьшению точности определения углового положения объекта обнаружения.
В основу изобретения поставлена задача создания мобильного малошумного специализированного средства - носителя КП для измерения дифференциальных векторных характеристик звукового поля, конструктивно обеспечивающего:
- повышение качества дифференцирования векторных характеристик звукового поля по вертикальной координате;
- устранение влияния корпуса аппарата на характеристики КП;
- увеличение точности определения углового положения объекта обнаружения в ходе вертикального сканирования;
- повышение дальности и точности обнаружения подводного движущегося источника шума.
Поставленная задача решается тем, что АНПА для измерения дифференциальных характеристик векторного звукового поля, содержащий цилиндрический корпус, снабженный носовым отсеком, систему бортового управления с системой спутниковой навигации, записи и передачи информации, аккумуляторные батареи, систему управления плавучестью, набор датчиков, включающий компас, инклинометр и датчик глубины, причем носовой отсек образован звукопрозрачным обтекателем и выполнен сообщающимся с внешней средой, в носовом отсеке размещена подвеска, включающая звукопрозрачную рамку, внутри которой установлен КП, причем сама подвеска закреплена в двух точках на звукопрозрачной рамке и в двух точках на КП, дополнительно снабжен маршевыми движителями, установленными по одному на каждом борту цилиндрического корпуса в его горизонтальной плоскости соосно продольной оси, системой изменения остойчивости аппарата, выполненной с возможностью управления величиной его момента остойчивости, блоком обработки данных КП, а цилиндрический корпус аппарата дополнительно снабжен кормовым отсеком, идентичным носовому отсеку, в котором установлен второй КП, размещенный в звукопрозрачной рамке подвески, причем как в носовом, так и в кормовом отсеках звукопрозрачная рамка выполнена в виде замкнутого линейного элемента с распределенной по длине массой и закреплена посредством полукарданового подвеса на звукопрозрачных обтекателях соответствующих отсеков, при этом каждая звукопрозрачная рамка дополнительно снабжена плавучестью и противовесом, выполненными в виде верхнего и нижнего демпферов соответственно и имеющими суммарно нейтральную плавучесть, а система бортового управления выполнена с возможностью выработки команд для маршевых движителей, систем управления плавучестью и изменения остойчивости на основании текущих дифференциальных характеристик информационного параметра, поступающих от блока обработки данных КП.
Отличительными существенными признаками заявляемого технического решения являются:
- повышение качества дифференцирования векторных характеристик звукового поля по вертикальной координате посредством установки двух КП;
- устранение влияния корпуса аппарата на характеристики КП за счет вертикальной ориентации носителя при измерениях, обеспеченной системами изменения остойчивости и регулирования плавучести, а также закрепления КП в полукардановом подвесе к обтекателю;
- увеличение точности определения углового положения объекта обнаружения в ходе вертикального сканирования за счет малого горизонтального отклонения АНПА от его координат на поверхности, определенных спутниковой навигационной системой, обеспеченное использованием систем изменения остойчивости и регулирования плавучести;
- повышение дальности и точности обнаружения подводного движущегося источника шума посредством организации длительного вертикального зависания АНПА в зоне повышенной освещенности, обеспеченного использованием систем изменения остойчивости и регулирования плавучести с управлением по данным от КП.
Следовательно, предложенная совокупность, как известных, так и отличительных признаков заявленного изобретения позволяет создать АНПА для автоматизации процесса измерения дифференциальных характеристик информационного характера в зонах повышенной освещенности, увеличить помехоустойчивость обнаружения слабых сигналов КП за счет увеличения времени накопления данных и обеспечить выполнение операции обнаружения в точке с известными географическими координатами.
Предлагаемое устройство позволяет осуществить реализацию управляемого автоматического поиска зон с увеличенным уровнем параметров векторного звукового поля с возможностью отслеживания динамики изменения поля и накопления данных и, кроме того, реализовать схему определения дифференциальных характеристик при установке двух идентичных КП.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом.
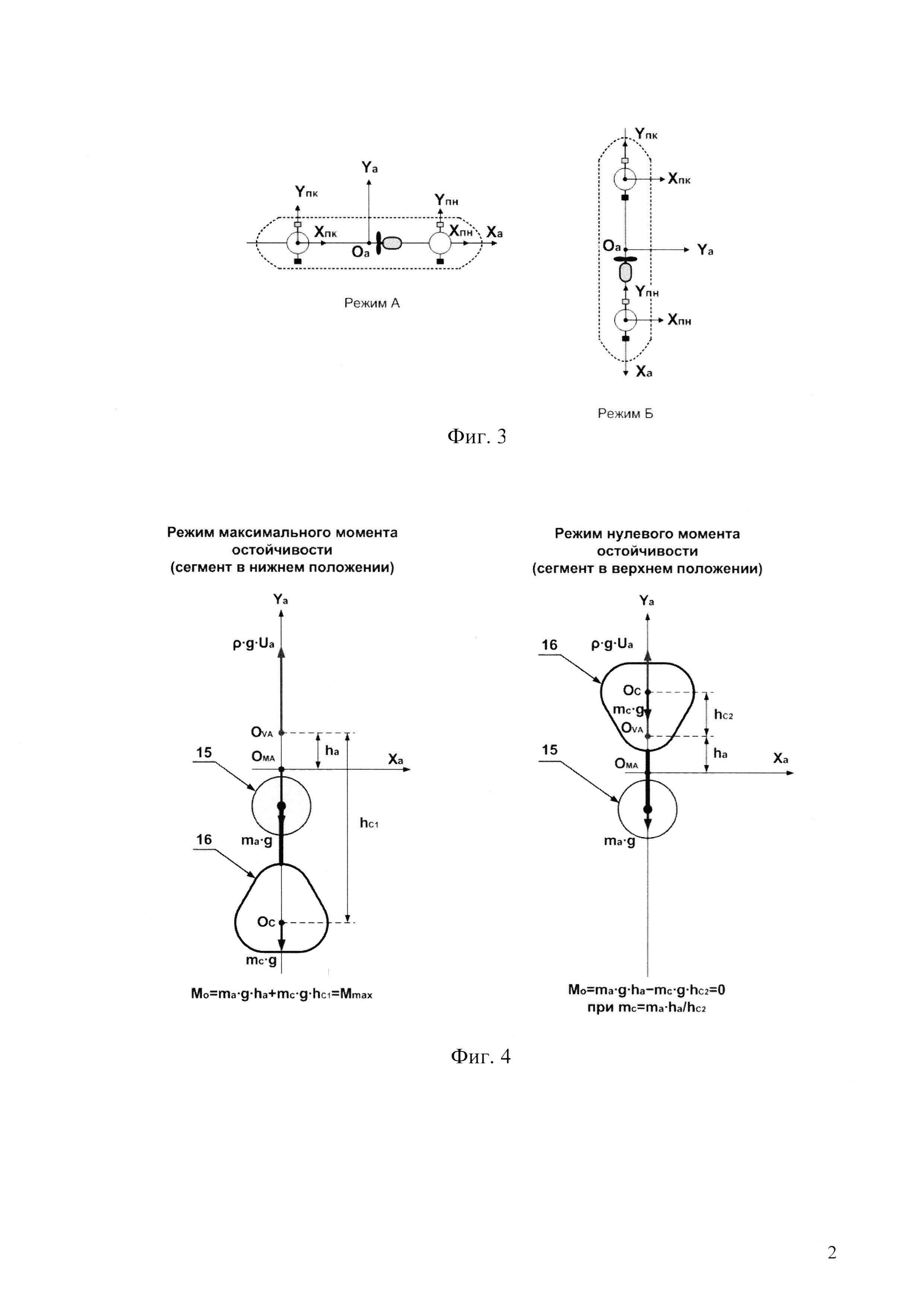
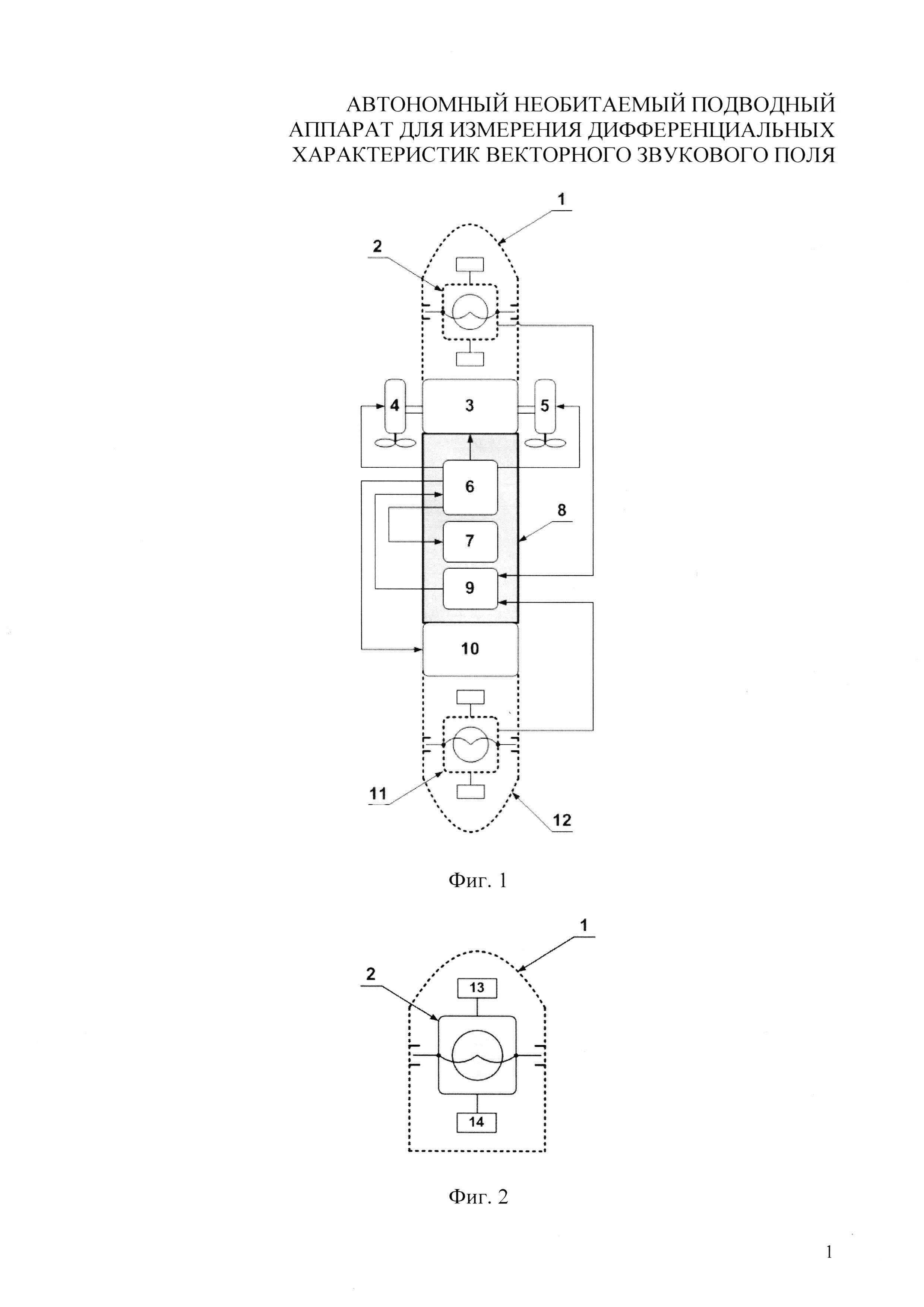
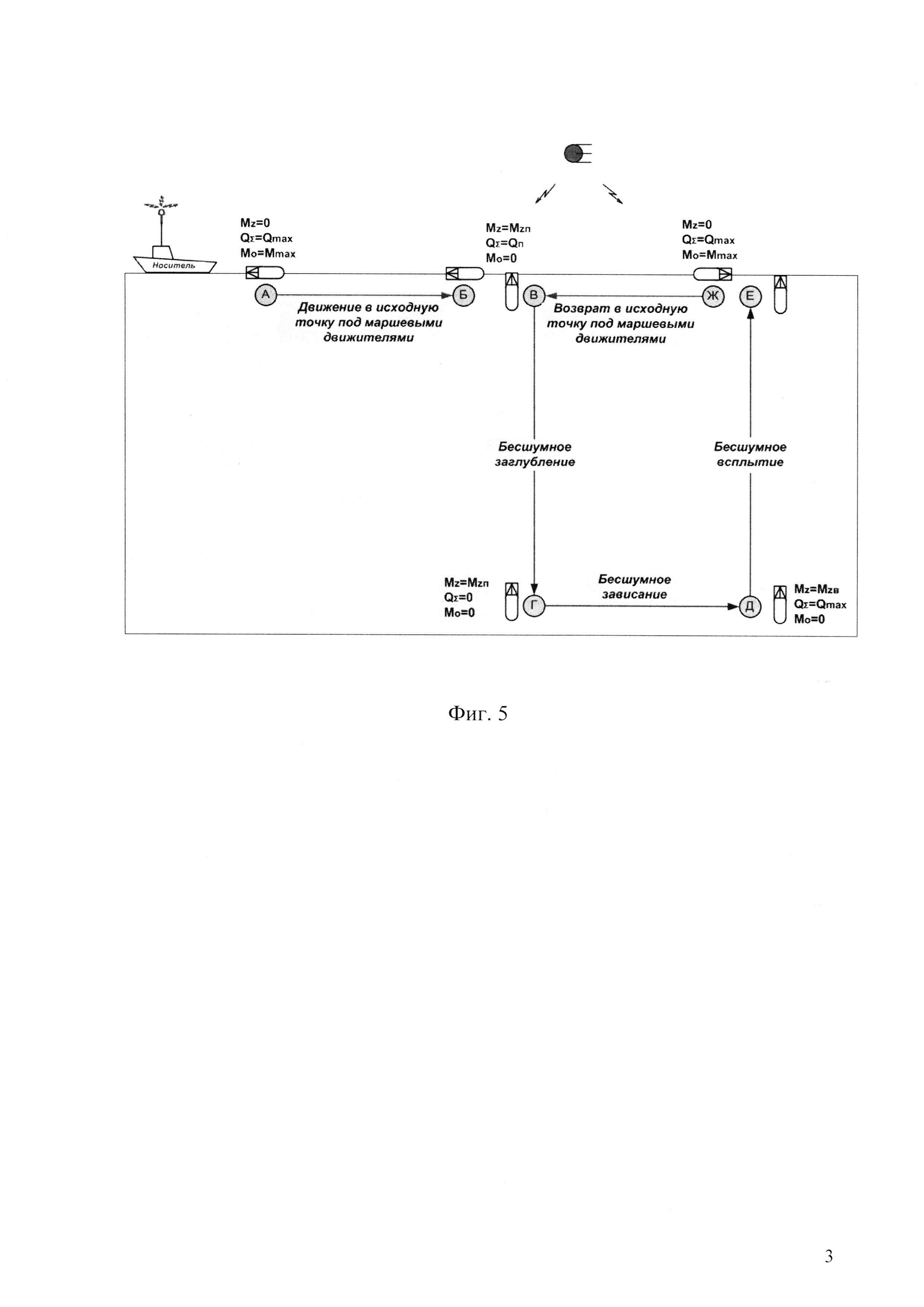
Сущность изобретения поясняется чертежами, где на фиг. 1 показана общая конструктивная схема АНПА; на фиг. 2 - конструктивная схема размещения КП на борту АНПА, обеспечивающая минимальные искажения звукового поля и защиту от шумов обтекания и вибраций; на фиг. 3 показана ориентация осей чувствительности носового (ХпнYпн) и кормового (XпкYпк) КП относительно связанной системы координат АНПА (OaXaYa), где обозначены: режим А - движение АНПА по поверхности под маршевыми движителями; режим Б - бесшумное вертикальное движение и зависание за счет регулирования плавучести и момента остойчивости АНПА; на фиг. 4 показан принцип действия системы изменения остойчивости, где обозначены: OVA - центр водоизмещения аппарата, ОMA - центр масс аппарата, ОC - центр масс грузового сегмента, mа - масса аппарата, ha - метацентрическая высота аппарата, mс - масса грузового сегмента, hC1 - метацентрическая высота грузового сегмента (нижнее положение), hC2 - метацентрическая высота грузового сегмента (верхнее положение), Мo - момент остойчивости; на фиг. 5 приведена схема движения АНПА по модели использования устройства, где обозначены: Mz - момент, создаваемый системой регулирования плавучести по дифференту при погружении; Mzп - момент, создаваемый системой регулирования плавучести по дифференту при погружении; Mzв - момент, создаваемый системой регулирования плавучести по дифференту при всплытии; QΣ - суммарная плавучесть АНПА с учетом системы регулирования; Qп - суммарная плавучесть АНПА при вертикальном погружении; Qв - суммарная плавучесть АНПА при вертикальном всплытии; Qмах - суммарная плавучесть АНПА при движении по поверхности и передаче накопленных данных; Мо - изменяемый момент остойчивости АНПА; Ммах - максимальное значение момента остойчивости, соответствующее нижнему положению грузового сегмента (см. фиг. 4).
Заявленный АНПА для измерения дифференциальных характеристик векторного звукового поля содержит носовой звукопрозрачный обтекатель 1, носовой КП с системой подвеса 2, носовую секцию системы регулирования плавучести 3, левый маршевый движитель 4, правый маршевый движитель 5, систему бортового управления и навигации с аккумуляторной батареей и набором датчиков 6, систему изменения остойчивости 7, герметичный контейнер 8, блок обработки данных комбинированных акустических приемников 9, кормовую секцию системы регулирования плавучести 10, кормовой КП с системой подвеса 11, кормовой звукопрозрачный обтекатель 12. Каждая звукопрозрачная рамка КП снабжена плавучестью 13 и противовесом 14 (см. фиг. 2), выполненными в виде верхнего и нижнего демпферов соответственно и имеющими суммарно нейтральную плавучесть. Система изменения момента остойчивости снабжена электроприводом 15 поворота грузового сегмента 16 (см. фиг. 4), который обеспечивает нулевой момент остойчивости АНПА при переводе грузового сегмента 16 в верхнее положение и максимальное значение момента остойчивости при перемещении грузового сектора в нижнее положение (см. фиг. 4).
Измеренные носовым 2 и кормовым 11 КП параметры акустического поля поступают в блок 9 обработки данных, который определяет текущие дифференциальные характеристики информационного параметра и передает их в систему 6 бортового управления, вырабатывающую команды управления маршевыми движителями 4 и 5, системой 7 изменения остойчивости, носовой 3 и кормовой 10 секцией системы управления плавучести, обеспечивающие автоматический поиск зон с увеличенным уровнем параметров векторного звукового поля с возможностью отслеживания динамики изменения поля и увеличением времени накопления данных для последующего определения пеленга на источник шума.
АНПА для измерения дифференциальных характеристик векторного звукового поля работает следующим образом (см. фиг. 5).
От точки спуска на воду (положение А) АНПА перемещается своим ходом по поверхности с максимальными значениями объемов носовой и кормовой секции системы регулирования плавучести, максимальным моментом остойчивости при нулевом дифференте к месту заглубления с использованием маршевых движителей и контролем текущих координат по данным спутниковой навигационной системы. В точке погружения (положение Б), координаты которой заданы, стартует миссия по поиску зон повышенной освещенности. При этом системой изменения остойчивости устанавливается нулевое значение момента остойчивости перемещением в верхнее положение грузового сегмента (см. фиг. 4), а объемами носовой и кормовой секции системы регулирования плавучести АНПА придается небольшая отрицательная плавучесть и момент, под действием которого устанавливается угол дифферента 90 градусов на нос (положение В). При этом система подвеса звукопрозрачной рамки на полукардане придает обоим КП строго вертикальное положение, при котором их вертикальная ось совпадает с продольной осью АНПА ОХа (см. фиг. 3), что в совокупности с выбранным подвесом рамки обеспечивает идентичность приема сигналов обоими приемниками в горизонтальной плоскости и исключение искажений звукового поля, вносимых корпусом АНПА. Далее АНПА начинает строго вертикальное бесшумное заглубление с минимальным гидродинамическим сопротивлением корпуса, минимальным сносом в горизонтальной плоскости от точки старта и текущим контролем уровня информационного параметра. Блок обработки данных приемников на основе изменения уровня информационного параметра определяет глубину нахождения зоны высоких значений информационного параметра и вырабатывает команды системе управления плавучестью, обеспечивающие «бесшумное» зависание на требуемой глубине с нулевой плавучестью, углом дифферента 90 градусов на нос и накопление данных с последующей выработкой решения об обнаружении шумящего источника и его угловом положении относительно координат точки начала погружения (положение Г). После выработки блоком обработки данных приемников решения об обнаружении объекта и вычислении его углового положения относительно АНПА система бортового управления и навигации изменением объемов носовой и кормовой секции системы регулирования плавучестью придает АНПА максимальную положительную плавучесть и момент, под действием которого устанавливается угол дифферента 90 градусов на нос (положение Д). Далее аппарат начинает строго вертикальное всплытие до поверхности с минимальными энергетическими затратами и минимальным сносом в горизонтальной плоскости. После всплытия на поверхность (положение Е) системой изменения остойчивости устанавливается максимальное значение момента остойчивости переводом грузового сегмента в нижнее положение, а объемами носовой и кормовой секции системы регулирования плавучести АНПА придается максимальная положительная плавучесть и нулевой момент по дифференту (положение Ж). При этом антенная система устройств связи АНПА получает максимальное возвышение над поверхностью воды, и становиться возможной передача накопленных в ходе погружения данных через каналы спутниковой или радиосвязи. Далее АНПА перемещается своим ходом по поверхности с максимальными значениями объемов носовой и кормовой секции системы регулирования плавучести, максимальной остойчивостью при нулевом дифференте в точку погружения (положение Б) с использованием маршевых движителей и контролем текущих координат по данным спутниковой навигационной системы. По достижении исходной точки погружения заканчивается цикл модели использования, который повторяется необходимое количество раз.
Таким образом, благодаря указанным особенностям конструкции заявленного АНПА для измерения дифференциальных характеристик векторного звукового поля и режимам бесшумного маневрирования повышено качество дифференцирования по вертикальной координате за счет устранения влияния корпусной конструкции АНПА на характеристики КП, увеличено время наблюдения данных при пространственном дифференцировании вертикальной компоненты информационного параметра за счет регулируемого пересечения аппаратом зон повышенной освещенности. Кроме того, практически устранен горизонтальный снос АНПА относительно точки старта с координатами, определенными спутниковой навигационной системой, что повышает точность получаемой информации о координатах АНПА в момент обнаружения шумящего объекта и существенно увеличивает точность определения углового положения объекта обнаружения.
По сравнению с прототипом заявленный АНПА для измерения дифференциальных характеристик векторного звукового поля обладает рядом отличий и достоинств, а именно:
- установка двух КП повышает качество измерения векторных характеристик звукового поля по вертикальной координате;
- вертикальная ориентация корпуса аппарата при измерениях в ходе движения и зависания, обеспеченная системами изменения остойчивости и регулирования плавучести, а также закрепление обоих КП в полукардановом подвесе к обтекателю устранило влияние корпуса аппарата на характеристики приемников;
- вертикальная ориентация корпуса аппарата при измерениях, обеспеченная системами изменения остойчивости и регулирования плавучести, увеличивает точность определения углового положения объекта обнаружения в ходе вертикального сканирования за счет малого горизонтального отклонения АНПА от его координат на поверхности, определенных спутниковой навигационной системой;
- автоматический поиск и длительная бесшумная стабилизация АНПА на глубине погружения с увеличенным уровнем параметров звукового поля (зона повышенной освещенности), обеспеченные системами изменения остойчивости и регулирования плавучести с управлением от блока обработки данных КП, повышают дальность и точность обнаружения подводного движущегося источника шума;
- маршевые движители с системой бортового управления и навигации дают возможность многократного возврата АНПА после всплытия в заданную точку поверхности по спутниковой навигационной системе, что обеспечивает долговременное пеленгование шумящих объектов на рубеже охраняемой акватории при наличии течения в районе работ.
Автономный необитаемый подводный аппарат для измерения дифференциальных характеристик векторного звукового поля, содержащий цилиндрический корпус, снабженный носовым отсеком, систему бортового управления с системой спутниковой навигации, записи и передачи информации, аккумуляторные батареи, систему управления плавучестью, набор датчиков, включающий компас, инклинометр и датчик глубины, причем носовой отсек образован звукопрозрачным обтекателем и выполнен сообщающимся с внешней средой, в носовом отсеке размещена подвеска, включающая звукопрозрачную рамку, внутри которой установлен акустический комбинированный приемник, причем сама подвеска закреплена в двух точках на звукопрозрачной рамке и в двух точках на акустическом комбинированном приемнике, отличающийся тем, что аппарат снабжен маршевыми движителями, установленными по одному на каждому борту цилиндрического корпуса в его горизонтальной плоскости соосно продольной оси, системой изменения остойчивости аппарата, управляющей величиной его момента остойчивости за счет поворота грузового сегмента относительно корпуса и блоком обработки данных акустических комбинированных приемников, а цилиндрический корпус аппарата дополнительно снабжен кормовым отсеком, идентичным носовому отсеку, в котором установлен второй акустический комбинированный приемник, размещенный в звукопрозрачной рамке подвески, причем как в носовом, так и кормовом отсеках звукопрозрачная рамка выполнена в виде замкнутого линейного элемента с распределенной по длине массой и закреплена посредством полукарданового подвеса на звукопрозрачных обтекателях соответствующих отсеков, при этом каждая звукопрозрачная рамка дополнительно снабжена плавучестью и противовесом, выполненными в виде верхнего и нижнего демпферов соответственно и имеющими суммарно нейтральную плавучесть, а система бортового управления выполнена с возможностью выработки команд для маршевых движителей, систем управления плавучестью и изменения остойчивости на основании текущих дифференциальных характеристик информационного параметра, поступающих от блока обработки данных акустических комбинированных приемников.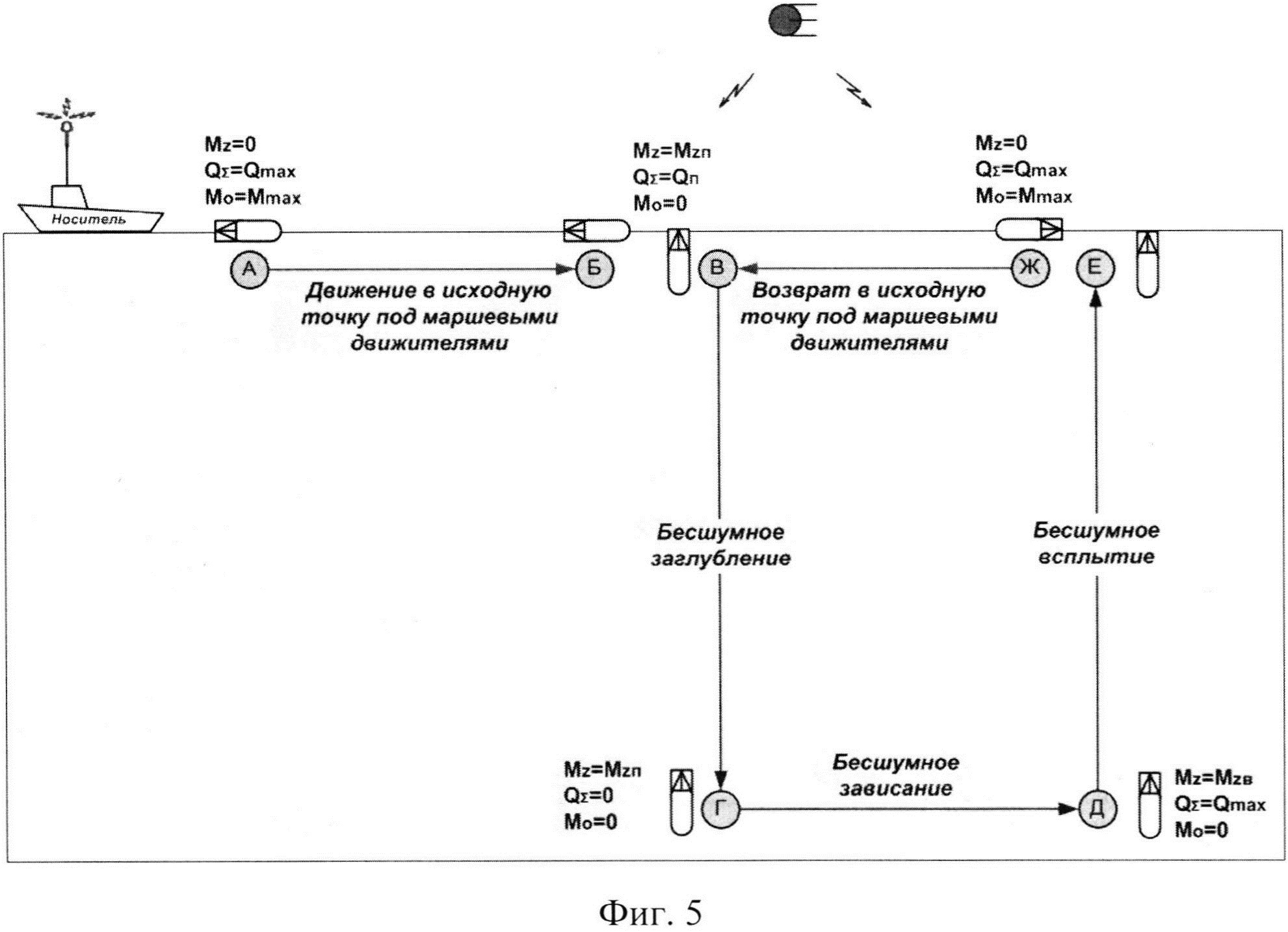
Одномодовый плазмонный волновод
Квантовый генератор случайных чисел
Генератор плазмонных импульсов терагерцовой частоты
Устройство для изготовления интегральной оптической волноводной структуры
Устройство для сейсмической разведки
Способ подводной сейсмической разведки
Сеть квантового распределения ключей
Подводный буровой модуль для бурения нефтяных и газовых скважин
Система детектирования одиночных фотонов
Композиция для получения полупроницаемой пористой мембраны
Антенный модуль прецизионного доплеровского лага для глубоководного подводного аппарата
Подводный аппарат для уничтожения потенциально опасного стационарного объекта
Способ навигационного обеспечения автономного подводного робота, контролируемого с борта обеспечивающего судна
Способ определения горизонтальных координат неподвижного подводного источника гидроакустических навигационных сигналов
Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход
Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата
Устройство для электроснабжения подводного объекта с борта судна-носителя
Способ обнаружения подводного источника широкополосного шума
Способ обнаружения подводного источника широкополосного шума
Устройство для подводного пуска и приема автономного необитаемого подводного аппарата

