Результат интеллектуальной деятельности: Способ обнаружения подводного источника широкополосного шума
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может использоваться в системах шумопеленгования и контроля подводной обстановки.
Известен способ обнаружения шумящих в море объектов (Патент РФ №2300118, МПК G01S 3/80, G01S 15/04, опубликован 27.05.2007 г.), включающий прием первичного поля шумоизлучения объектов многоканальной антенной, при котором осуществляют частотно-временную обработку принятых шумовых сигналов для каждого канала наблюдения в горизонтальной плоскости, квадрируют, усредняют по времени, центрируют и нормируют сигналы к помехе, осуществляют наблюдение на каждом цикле обзора отметок принятых шумовых сигналов всей совокупности пространственных каналов в горизонтальной плоскости и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал-помеха.
В известном способе введены новые операции, а именно:
- на очередном цикле обзора наблюдение осуществляют двумя независимыми последовательностями операций:
- в первой последовательности осуществляют сопровождение энергетических параметров шумового сигнала по уровню, дисперсии уровня и отбраковку локальных ложных максимумов шумовых сигналов, для чего выполняют следующие операции:
отделяют шумовые сигналы от фоновых шумов над уровнем, который понижен в несколько раз относительно порога обнаружения; определяют уровень всех локальных максимумов сигнала; вычисляют по заданному закону аппроксимации уточненное значение уровня шумового сигнала по данным нескольких откликов пространственных каналов в окрестности данного локального максимума сигнала, образующих сигнальный фрагмент; определяют смещение уровня сигнала за время между предыдущим и текущим циклами обзора и вычисляют плотность вероятности измеренного смещения уровня сигнала и плотность вероятности ложных тревог для заданного времени накопления;
- во второй последовательности осуществляют сопровождение информационных параметров шумового сигнала по пеленгу, дисперсии пеленга, по скорости и ускорению изменения пеленга и отбраковку пеленгов локальных ложных максимумов шумовых сигналов, для чего выполняют следующие операции: фиксируют пеленг пространственного канала, в котором наблюдается каждый локальный максимум сигнала; вычисляют по заданному закону аппроксимации уточненное значение пеленга шумового сигнала по данным нескольких откликов пространственных каналов в окрестности данного локального максимума сигнала, образующих сигнальный фрагмент; составляют из совокупности оценки пеленга и величины изменения пеленга (ВИП) вектор параметров движения локальных максимумов сигнала; вычисляют матрицу взаимно корреляционных функций для вектора параметров движения локальных максимумов сигнала; вычисляют скорость изменения ВИПа и пеленга за время между предыдущим и текущим циклами обзора; в результате определяют прогнозные оценки пеленга и ВИПа локальных максимумов сигнала за время между предыдущим и текущим циклами обзора для заданного времени накопления; определяют дисперсию прогнозной оценки пеленга для заданного времени накопления и вычисляют ширину строба по пеленгу, в пределах которого осуществляется наблюдение каждого сигнала; вычисляют плотность вероятности смещения измеренного пеленга для заданного времени накопления;
- по результатам выполнения двух последовательностей операций вычисляют обобщенный вес локальных максимумов сигнала;
- сравнивают обобщенный вес локальных максимумов сигнала с порогом обнаружения сигнала, который соответствует пороговому отношению сигнал-помеха.
Недостатком известного способа является малая помехоустойчивость и малая дальность действия приемной системы при работе на низких частотах, когда размер приемной системы соизмерим с длиной волны, и при работе в мелком море, когда алгоритмы формирования пространственной направленности становятся неэффективными из-за дисперсионных искажений сигналов, а также возможность реализации способа только для сигналов фиксированного частотного диапазона, в котором апертура антенны обеспечивает необходимую пространственную направленность.
Известен также способ обнаружения шумящих объектов в мелком и глубоком море (патент РФ №2653189, МПК G01S 3/80, G01S 15/04, опубликован 07.05.2018 г. бюл. №13), включающий прием шумового сигнала комбинированным приемником, содержащим приемник звукового давления и трехкомпонентный приемник вектора колебательной скорости, при котором:
- выполняют частотно-временной обработку в заданном фиксированном частотном диапазоне принятого шумового сигнала;
- вычисляют в каждом частотном канале, сформированном в результате частотно-временной обработки принятого шумового сигнала, текущие значения комплексных амплитуд звукового давления, трех компонент вектора колебательной скорости, трех компонент вещественной составляющей вектора интенсивности и трех компонент мнимой составляющей вектора интенсивности в локальной системе координат комбинированного приемника для суммарного процесса сигнал плюс помеха и для помехи отдельно;
- формируют в каждом частотном канале усредненные за время T1 значения трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для суммарного процесса сигнал плюс помеха и для помехи отдельно;
- формируют в каждом частотном канале усредненные за время Т2=10Т1 комплексные амплитуды нулевой и первой гармоник вторичного спектра для трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для суммарного процесса сигнал плюс помеха и для помехи отдельно;
- нормируют все 21 информативный параметр, вычисленных для суммарного процесса сигнал плюс помеха, на соответствующие значения информативных параметров, вычисленные для помехи;
- вычисляют максимальное отношение сигнал/помеха для одного из 21 информативных параметров и принимают решения об обнаружении путем его сравнения с пороговым значением отношения сигнал/помеха.
Отличительными существенными признаками этого известного способа являются следующие операции:
- используют в качестве приемной системы комбинированный приемник, содержащий, кроме приемника звукового давления, трехкомпонентный приемник вектора колебательной скорости;
- формируют методами частотно-временной обработки сигналов набор частотных каналов в заданном фиксированном частотном диапазоне в векторных каналах комбинированного приемника;
- вычисляют в каждом частотном канале, сформированном в результате частотно-временной обработки принятых шумовых сигналов, текущие значения комплексных амплитуд трех компонент вектора колебательной скорости, текущие значения амплитуд трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности для суммарного процесса сигнал плюс помеха;
- усредняют за заранее определенный временной интервал Т1 значения трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для суммарного процесса сигнал плюс помеха;
- выделяют из текущих значений суммарного случайного процесса сигнал плюс помеха текущие значения помехи;
- вычисляют в каждом частотном канале текущие значения комплексных амплитуд трех компонент вектора колебательной скорости, текущие значения амплитуд трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности для помехи;
- усредняют за заранее определенный временной интервал T1 значения трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для помехи;
- вычисляют в каждом частотном канале за заранее определенный временной интервал T2=10T1 текущие значения комплексных амплитуд нулевой и первой гармоник вторичного спектра для трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для суммарного процесса сигнал плюс помеха;
- вычисляют в каждом частотном канале за заранее определенный временной интервал T2=10T1 текущие значения комплексных амплитуд нулевой и первой гармоник вторичного спектра для трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для помехи;
- нормируют квадрат звукового давления и компоненты комплексного вектора интенсивности, усредненные за время T1, вычисленные для суммарного процесса сигнал плюс помеха, на соответствующие значения квадрата звукового давления и компоненты комплексного вектора интенсивности, усредненные за время T1, вычисленные для помехи;
- нормируют вычисленные за время Т2=10Т1 текущие значения комплексных амплитуд нулевой и первой гармоник вторичного спектра для трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для суммарного процесса сигнал плюс помеха на соответствующие текущие значения комплексных амплитуд нулевой и первой гармоник вторичного спектра для трех компонент вещественной составляющей вектора интенсивности, трех компонент мнимой составляющей вектора интенсивности и квадрата звукового давления для помехи;
- вычисляют максимальное отношение сигнал/помеха из набора 21 информативных параметров, 7 информативных параметров для усредненных за время T1 нормированных на помеху значений комплексного вектора интенсивности и квадрата звукового давления и 14 информативных параметров для усредненных за время T2=10T1 нормированных на помеху значений комплексных амплитуд нулевой и первой гармоник вторичного спектра для комплексного вектора интенсивности и квадрата звукового давления;
- принимают в качестве модельной статистики поля помехи в гидрофонном канале и в каналах вектора колебательной скорости гауссову статистику;
- принимают в качестве модельной статистики поля помехи в каналах вектора интенсивности Лапласову статистику;
- вычисляют на основе принятых статистик аналитическую зависимость вероятности правильного обнаружения при заданной вероятности ложной тревоги от порогового отношения сигнал-помеха по методу максимального правдоподобия;
- принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал/помеха максимального отношения сигнал/помеха, вычисленного из набора 21 информативных параметров.
Известный способ является наиболее близким к заявленному изобретению и принят за прототип.
Для данного известного способа характерна малая помехоустойчивость и малая дальность обнаружения источника шумового сигнала из-за отсутствия достоверных данных о характеристиках помехи, на основе которых формируются пороговые уровни в устройстве обнаружения, а также применения пороговых механизмов обнаружения, основанных на вычислении величины не всей энергии сигнала, принимаемого от источника, а лишь отдельных его спектральных составляющих.
Задачей заявленного способа является повышение помехоустойчивости приемной системы и дальности обнаружения источника широкополосного шума на основе направленных свойств потока акустической энергии от него путем пространственной фильтрации шумоизлучения источника и накопления величины энергии потока от источника на каждой частоте наблюдаемого диапазона частот.
Для решения поставленной задачи в заявленный способ обнаружения подводного источника широкополосного шума, включающий прием шумового сигнала комбинированным приемником, содержащим приемник звукового давления и трехкомпонентный приемник вектора колебательной скорости частиц среды, при котором выполняют частотно-временную обработку принятого сигнала в наблюдаемом диапазоне частот, вычисляют в каждом частотном канале, сформированном в результате частотно-временной обработки принятого шумового сигнала, текущие значения комплексных амплитуд звукового давления и трех компонент вектора колебательной скорости частиц среды, а также текущую комплексную величину трех компонент вектора плотности потока энергии в локальной системе координат комбинированного приемника и принимают решение об обнаружении источника, вводят новые операции, а именно:
- формируют для принятого сигнала методами частотно-временной обработки сигналов набор частотных каналов, охватывающий весь наблюдаемый частотный диапазон;
- для текущего временного фрагмента принятого сигнала заданной длительности:
- вычисляют в каждом частотном канале средние величины трех компонент вектора плотности потока энергии;
- вычисляют в каждом частотном канале горизонтальный угол прихода потока энергии;
- вычисляют в каждом частотном канале энергетическую характеристику среднего потока акустической энергии - величину интенсивности потока;
- назначают равные горизонтальные угловые секторы, охватывающие весь горизонт наблюдения 0-360 град.;
- вычисляют для каждого назначенного углового сектора величину секторной интенсивности потока энергии;
- вычисляют величину средней секторной интенсивности потока энергии и назначают ее пороговой величиной для секторов;
- выделяют из назначенных угловых секторов секторы, в которых величина секторной интенсивности потока энергии превышает пороговую;
- формируют «мгновенное» угловое распределение величины секторной интенсивности потока энергии выделенных угловых секторов;
- выполняют описанный выше цикл обработки текущего временного фрагмента принятого сигнала и для последующих временных фрагментов той же длительности, но сдвинутых относительно предыдущего на фиксированный интервал времени;
- формируют из параметров «мгновенных» угловых распределений величины секторной интенсивности потока энергии выделенных угловых секторов, вычисленных в циклах обработки временных фрагментов принятого сигнала, сонограмму время-углового прихода потока энергии шумового сигнала в горизонтальной плоскости;
- определяют из сонограммы время-углового прихода потока энергии доминирующий угловой сектор с максимальной величиной секторной интенсивности потока энергии и проводят оценку временной устойчивости величины последней;
- анализируют данные текущей сонограммы время-углового прихода потока энергии и принимают решение об обнаружении источника широкополосного шума по уровню превышения величиной секторной интенсивности потока энергии доминирующего углового сектора пороговой величины, по временной устойчивости уровня превышения, а также соответствию временной изменчивости ориентации доминирующего углового сектора предполагаемой динамике движения источника, а по ориентации доминирующего сектора о направлении на источник.
Существенными признаками заявленного способа, общими с прототипом, являются следующие операции:
- используют в качестве приемной системы комбинированный приемника, содержащий, кроме приемника звукового давления, трехкомпонентный приемник вектора колебательной скорости частиц среды;
- вычисление в каждом частотном канале, сформированном в результате частотно-временной обработки принятых шумовых сигналов, текущих значений комплексных амплитуд звукового давления и трех компонент вектора колебательной скорости частиц среды, а также текущую комплексную величину трех компонент вектора плотности потока энергии в локальной системе координат комбинированного приемника;
- принимают решение об обнаружении источника,
а отличительными - следующие операции:
- формируют для принятого сигнала методами частотно-временной обработки сигналов набор частотных каналов, охватывающий весь наблюдаемый частотный диапазон;
- для текущего временного фрагмента принятого сигнала заданной длительности:
- вычисляют в каждом частотном канале средние величины трех компонент вектора плотности потока энергии;
- вычисляют в каждом частотном канале горизонтальный угол прихода потока энергии;
- вычисляют в каждом частотном канале энергетическую характеристику среднего потока акустической энергии - величину интенсивности потока;
- назначают равные горизонтальные угловые секторы, охватывающие весь горизонт наблюдения 0-360 град.;
- вычисляют для каждого назначенного углового сектора величину секторной интенсивности потока энергии;
- вычисляют величину средней секторной интенсивности потока энергии и назначают ее пороговой величиной для секторов;
- выделяют из назначенных угловых секторов секторы, в которых величина секторной интенсивности потока энергии превышает пороговую;
- формируют «мгновенное» угловое распределение величины секторной интенсивности потока энергии выделенных угловых секторов;
- выполняют описанный выше цикл обработки текущего временного фрагмента принятого сигнала и для последующих временных фрагментов той же длительности, но сдвинутых относительно предыдущего на фиксированный интервал времени;
- формируют из параметров «мгновенных» угловых распределений величины секторной интенсивности потока энергии выделенных угловых секторов, вычисленных в циклах обработки временных фрагментов принятого сигнала, сонограмму время-углового прихода потока энергии шумового сигнала в горизонтальной плоскости;
- определяют из сонограммы время-углового прихода потока энергии доминирующий угловой сектор с максимальной величиной секторной интенсивности потока энергии и проводят оценку временной устойчивости величины последней;
- анализируют данные текущей сонограммы время-углового прихода потока энергии и принимают решение об обнаружении источника широкополосного шума по уровню превышения величиной секторной интенсивности потока энергии доминирующего углового сектора пороговой величины, по временной устойчивости уровня превышения, а также соответствию временной изменчивости ориентации доминирующего углового сектора предполагаемой динамике движения источника, а по ориентации доминирующего сектора о направлении на источник.
Именно такая совокупность существенных признаков заявленного способа позволяет с помощью комбинированного приемника осуществить пространственную фильтрацию широкополосного шумового излучения источника и накопить величину энергии потока от источника на каждой частоте наблюдаемого диапазона частот, определить направление на источник, что повышает помехоустойчивость, дальность и эффективность действия приемной системы.
Новизна заявленного способа обнаружения подводного источника широкополосного шума заключается в том, что:
- обнаружение источника широкополосного шума основывается на анализе временной зависимости углового распределения потоков акустической энергии всех принимаемых векторным приемником частот и учета того обстоятельства, что поток энергии от источника концентрируется в определенном угловом секторе, значение которого в течение процесса обнаружения может меняться незначительно и соответствовать предполагаемой динамике движения источника;
- обнаружение источника широкополосного шума решается путем расчета угла прихода потока энергии на каждой частоте наблюдаемого диапазона частот, распределения потоков энергии по углу их прихода по равномерному ряду угловых секторов обзора горизонта, определения величины интенсивности потока энергии в пределах каждого углового сектора, выделения секторов, величина интенсивности потока энергии которых превышает пороговую, определенную как средняя секторная интенсивность потоков энергии принимаемых частот;
- решение об обнаружении источника широкополосного шума принимается на основе как энергетического накопления по всему наблюдаемому частотному диапазону сигнала от источника, так и увеличенного временного накопления данных о сигнале, что позволяет повысить помехоустойчивость приемной системы и дальность обнаружения очень слабого шумоизлучения источника;
- увеличение вероятности правильного обнаружения источника широкополосного шума обеспечивается аналогичной обработкой ряда временных фрагментов принятого сигнала и совместным анализом ее результатов на временную стабильность превышения величиной энергии потока выделенного углового сектора таковой в других секторах и порогового значения;
- направление на источник широкополосного шума в локальной системе координат комбинированного приемника определяется из единственной точки пространства во всем наблюдаемом частотном диапазоне.
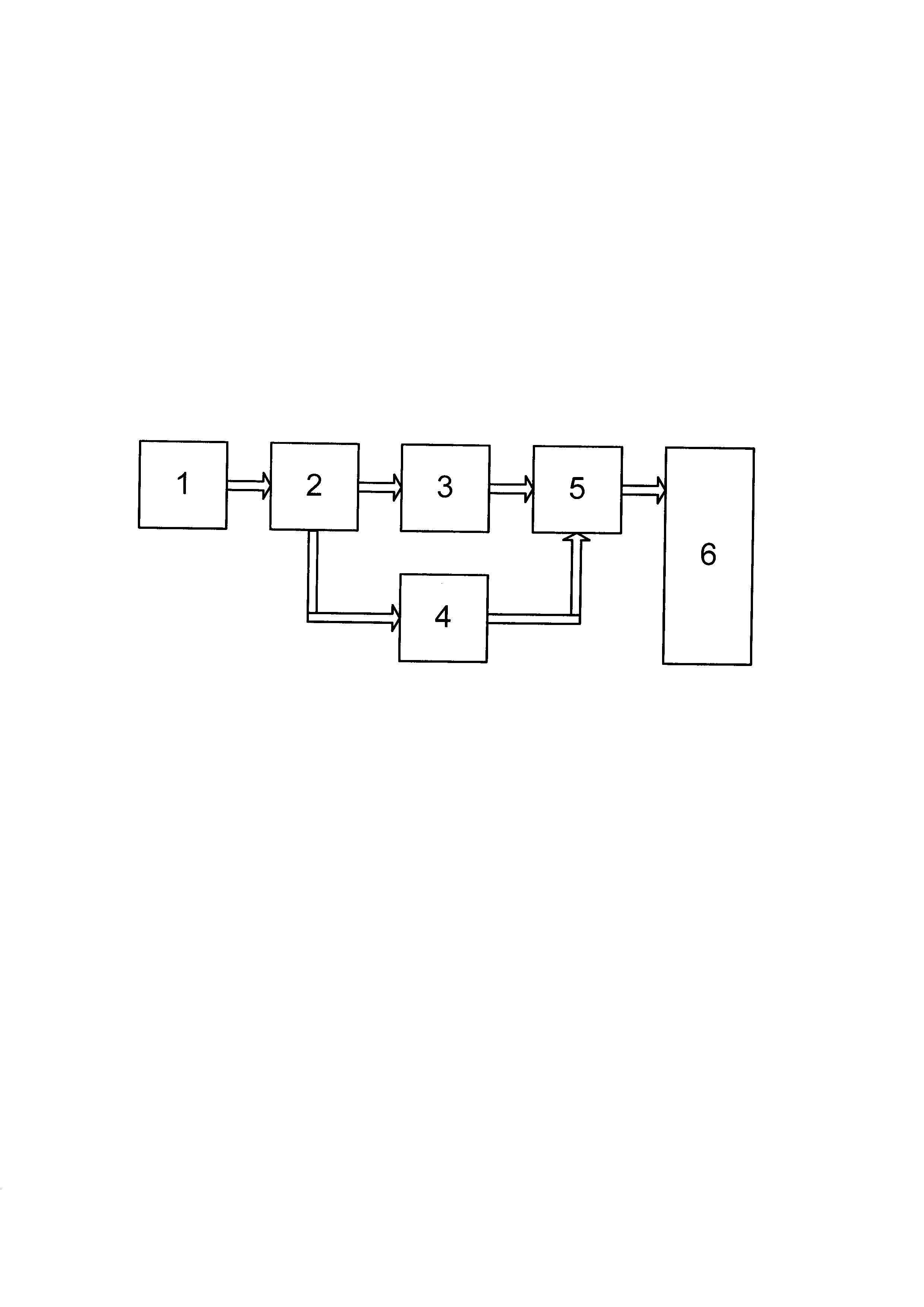
Блок-схема, поясняющая заявленный способ обнаружения подводного источника широкополосного шума, приведена на фиг. 1, где обозначены следующие элементы:
1 - приемная система с комбинированным приемником;
2 - блок расчета спектральных характеристик принятого сигнала (быстрое преобразование Фурье, например);
3 - блок расчета угла прихода потока энергии в каждом частотном канале;
4 - блок расчета величины энергии потока в каждом частотном канале;
5 - блок формирования углового распределения энергии потоков и выделения угловых секторов с высокой величиной энергии потока;
6 - блок накопления и анализа результатов обработки временных фрагментов принятого сигнала и принятия решений.
Заявленный способ обнаружения подводного источника широкополосного шума осуществляется следующей последовательностью действий.
Акустический сигнал от широкополосного шумового источника принимают комбинированным приемником 1, с выхода которого принятый сигнал звукового давления акустического поля в точке приема P(t) и трех ортогональных компонент вектора колебательной скорости частиц водной среды в локальной системе координат комбинированного приемника  (две первые компоненты составляют горизонтальную плоскость) поступает в блок расчета спектральных характеристик 2.
(две первые компоненты составляют горизонтальную плоскость) поступает в блок расчета спектральных характеристик 2.
В блоке 2:
- формируют для принятого сигнала методами частотно-временной обработки сигналов набор частотных каналов, охватывающий весь наблюдаемый частотный диапазон, с шириной полосы каналов Δf (Δf=1 Гц, например) и центральными частотами fi;
- определяют для принятого сигнала методами частотно-временной обработки сигналов в каждом частотном канале текущие комплексные значения амплитуд звукового давления Ap(fi,t) и трех компонент вектора колебательной скорости  по которым вычисляют текущую величину трех компонент вектора плотности потока акустической энергии
по которым вычисляют текущую величину трех компонент вектора плотности потока акустической энергии  по формуле (1)
по формуле (1)

где: n=х, у, z;
* - знак комплексного сопряжения,
- вычисляют в каждом частотном канале для текущего временного фрагмента принятого сигнала длительности Т (Т=10 сек, например) по текущим величинам средние величины трех компонент вектора плотности потока акустической энергии 
 и их модули <Ix(fi)>, <Iy(fi)> и <Iz(fi)>, которые поступают в блоки 3 и 4.
и их модули <Ix(fi)>, <Iy(fi)> и <Iz(fi)>, которые поступают в блоки 3 и 4.
В блоке 3 в каждом частотном канале для текущего временного фрагмента принятого сигнала длительности Т вычисляют горизонтальный угол прихода потока акустической энергии ϕi, который определен в области 0-360 град. обратной тригонометрической функцией atan2 по формуле (2)

а в блоке 4 - энергетическую характеристику среднего потока акустической энергии - величину его интенсивности <I(fi)> по формуле (3)

которые анализируют в блоке 5.
В блоке 5 для текущего временного фрагмента принятого сигнала длительности Т:
- назначают равные горизонтальные угловые секторы, охватывающие весь горизонт наблюдения 0-360 град;
- вычисляют для каждого назначенного углового сектора величину секторной интенсивности потока энергии - сумма величин интенсивности потоков энергии частотных каналов, имеющих углы прихода ϕi в пределах данного сектора;
- из суммы величин интенсивности потоков энергии всех частотных каналов и количества назначенных угловых секторов вычисляют величину средней секторной интенсивности потока энергии и назначают ее пороговой величиной для секторов;
- выделяют из назначенных угловых секторов секторы, в которых величина секторной интенсивности потока энергии превышает пороговую величину;
- формируют «мгновенное» угловое распределение величины секторной интенсивности потока энергии выделенных угловых секторов;
Кроме того, в блоке 5 выполняют описанный выше цикл обработки текущего временного фрагмента принятого сигнала и для последующих временных фрагментов той же длительности Т, но сдвинутых относительно предыдущего на фиксированный интервал времени t (t=1/Δf, например). Параметры «мгновенных» угловых распределений величин секторной интенсивности потока энергии выделенных угловых секторов, вычисленные в циклах обработки временных фрагментов принятого сигнала, поступают в блок 6.
В блоке 6:
- формируют из параметров «мгновенных» угловых распределений величины секторной интенсивности потока энергии выделенных угловых секторов, вычисленных в циклах обработки временных фрагментов принятого сигнала, сонограмму время-углового прихода потока акустической энергии шумового сигнала в горизонтальной плоскости;
- определяют из сонограммы время-углового прихода потока акустической энергии доминирующий угловой сектор с максимальной величиной секторной интенсивности потока энергии и проводят оценку временной устойчивости величины последней.
В этом же блоке анализируют данные текущей сонограммы время-углового прихода потока акустической энергии и принимают решение об обнаружении источника широкополосного шума на основании:
- уровня превышения величиной секторной интенсивности потока энергии доминирующего углового сектора пороговой величины для секторов;
- временной устойчивости величины секторной интенсивности потока энергии доминирующего углового сектора;
- соответствия временной изменчивости ориентации доминирующего углового сектора предполагаемой динамике движения источника,
а по ориентации доминирующего сектора о направлении на источник в локальной системе координат комбинированного приемника, или продолжают накапливать данные для принятия решения.
Способ обнаружения подводного источника широкополосного шума, включающий прием шумового сигнала комбинированным приемником, содержащим приемник звукового давления и трехкомпонентный приемник вектора колебательной скорости частиц среды, при котором выполняют частотно-временную обработку принятого сигнала в наблюдаемом диапазоне частот, вычисляют в каждом частотном канале, сформированном в результате частотно-временной обработки принятого шумового сигнала, текущие значения комплексных амплитуд звукового давления и трех компонент вектора колебательной скорости частиц среды, а также текущую комплексную величину трех компонент вектора плотности потока энергии в локальной системе координат комбинированного приемника и принимают решение об обнаружении источника, отличающийся тем, что дополнительно формируют для принятого сигнала методами частотно-временной обработки сигналов набор частотных каналов, охватывающий весь наблюдаемый частотный диапазон, для текущего временного фрагмента принятого сигнала заданной длительности, вычисляют в каждом частотном канале средние величины трех компонент вектора плотности потока энергии, вычисляют в каждом частотном канале горизонтальный угол прихода потока энергии, вычисляют в каждом частотном канале энергетическую характеристику среднего потока акустической энергии - величину интенсивности потока, назначают равные горизонтальные угловые секторы, охватывающие весь горизонт наблюдения 0-360 град, вычисляют для каждого назначенного углового сектора величину секторной интенсивности потока энергии, вычисляют величину средней секторной интенсивности потока энергии и назначают ее пороговой величиной для секторов, выделяют из назначенных угловых секторов секторы, в которых величина секторной интенсивности потока энергии превышает пороговую, формируют «мгновенное» угловое распределение величины секторной интенсивности потока энергии выделенных угловых секторов, выполняют описанный выше цикл обработки текущего временного фрагмента принятого сигнала и для последующих временных фрагментов той же длительности, сдвинутых относительно предыдущего на фиксированный интервал времени, формируют из параметров «мгновенных» угловых распределений величины секторной интенсивности потока энергии выделенных угловых секторов, вычисленных в циклах обработки временных фрагментов принятого сигнала, сонограмму время-углового прихода потока энергии шумового сигнала в горизонтальной плоскости, определяют из сонограммы время-углового прихода потока энергии доминирующий угловой сектор с максимальной величиной секторной интенсивности потока энергии и проводят оценку временной устойчивости величины последней, анализируют данные текущей сонограммы время-углового прихода потока энергии и принимают решение об обнаружении источника широкополосного шума по уровню превышения величиной секторной интенсивности потока энергии доминирующего углового сектора пороговой величины, по временной устойчивости уровня превышения, а также соответствию временной изменчивости ориентации доминирующего углового сектора предполагаемой динамике движения источника, а по ориентации доминирующего сектора - о направлении на источник.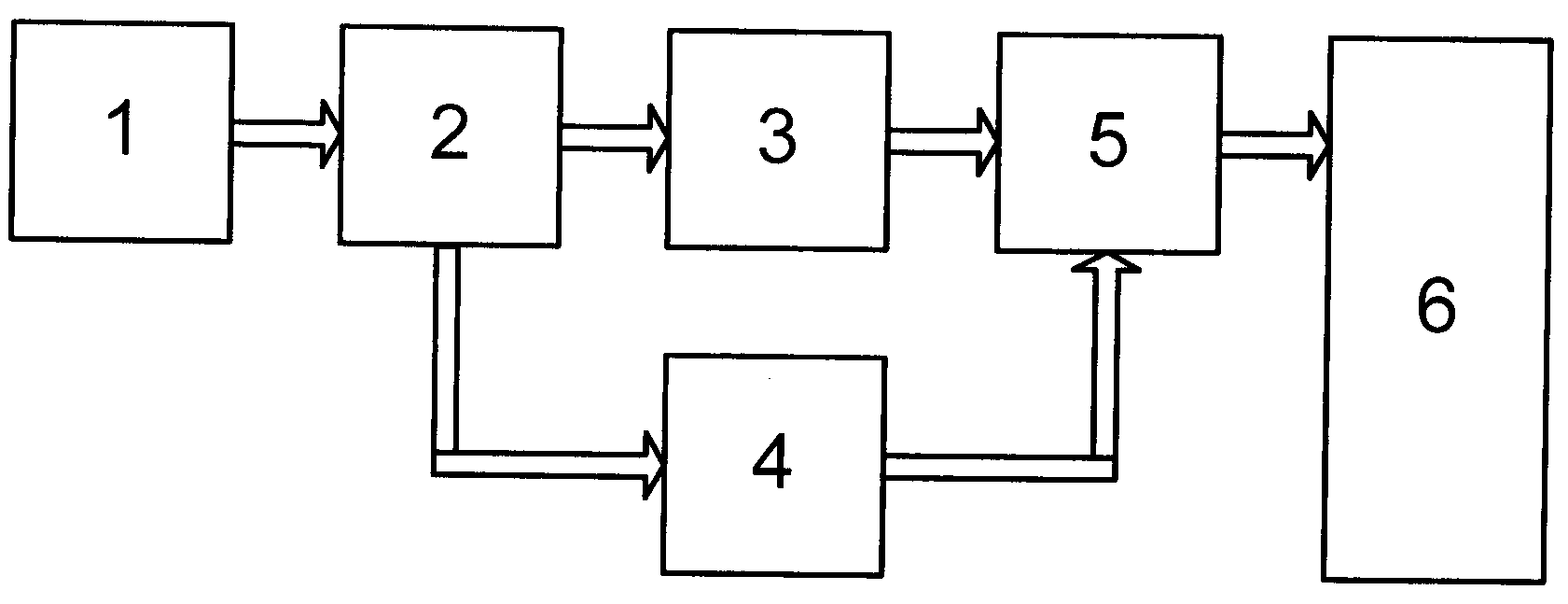
Способ изготовления цилиндрической оболочки прочного корпуса подводного аппарата из стеклометаллокомпозита
Способ изготовления цилиндрической оболочки прочного корпуса подводного аппарата из стеклометаллокомпозита
Устройство для бесконтактной передачи электроэнергии на подводный объект (варианты)
Способ изготовления листового стеклометаллокомпозита
Спускоподъемное устройство
Способ профилирования донных отложений
Способ профилирования донных отложений
Устройство для зарядки аккумуляторной батареи
Гидроакустический комплекс для обнаружения движущегося заглубленного источника звука и измерения его координат в мелком море
Устройство для зарядки аккумуляторной батареи подводного объекта
Антенный модуль прецизионного доплеровского лага для глубоководного подводного аппарата
Автономный необитаемый подводный аппарат для измерения дифференциальных характеристик векторного звукового поля
Способ навигационного обеспечения автономного подводного робота, контролируемого с борта обеспечивающего судна
Способ определения горизонтальных координат неподвижного подводного источника гидроакустических навигационных сигналов
Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход
Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата
Способ обнаружения подводного источника широкополосного шума
Устройство для подводного пуска и приема автономного необитаемого подводного аппарата
Способ позиционирования автономного подводного аппарата в глубоком море

