Результат интеллектуальной деятельности: НАЗЕМНЫЙ ПУНКТ УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМИ КОМПЛЕКСАМИ
Вид РИД
Изобретение
Изобретение относится к области систем управления группами беспилотных подвижных средств, включающими в себя беспилотные летательные аппараты (БЛА) и мобильные наземные роботы, а именно к наземным подвижным пунктам управления группами воздушных и наземных робототехнических комплексов (РТК).
Заявленный наземный пункт управления может быть использован для управления несколькими группами разнотипных воздушных и наземных робототехнических комплексов, выполняющих различные задачи, а также для обработки и передачи полученной от робототехнических комплексов информации на стоянке и в движении наземного пункта управления.
Известен наземный пункт управления РТК, описанный, например, в книге: Оружие и технологии России. Энциклопедия. XXI век. Том 13. Системы управления, связи и радиоэлектронной борьбы. - М.: Издательский дом «Оружие и технологии». 2006. с. 618-619. Так, известный наземный пункт управления РТК «Стрекоза» включает два транспортно-пусковых контейнера (ТПК), катапультную пусковую установку (КПУ), наземный автоматизированный комплекс транспортировки, пуска-посадки и управления полетом (НАК ППУ) и два БЛА. Два ТПК обеспечивают транспортировку БЛА, которые запускаются с помощью КПУ. В полете БЛА взаимодействует с НАК ППУ через радиоканал. Для этого выход управляющего сигнала и вход информационного сигнала НАК ППУ подключены к соответствующим входу и выходу приемо-передающего антенного модуля.
БЛА снабжен радиоэлектронным комплексом наблюдения и передачи информации, состоящим из блока управления полетом БЛА и положением видеокамер, первый и второй выходы которого подключены к управляющим входам, соответственно, видеокамер и органов управления полетом БЛА. Выходы видеокамер подключены к входу радиопередатчика, снабженного бортовой передающей антенной, а выход радиоприемника подключен к входу блока управления полетом БЛА и положением видеокамер, причем радиоприемник снабжен бортовой приемной антенной.
НАК ППУ состоит из радиоприемника, радиопередатчика, формирователя управляющих сигналов, модуля визуализации и блока памяти. Выход радиоприемника подключен к входам модуля визуализации и блока памяти. Вход радиоприемника является информационным входом НАК ППУ, а выход радиопередатчика является управляющим выходом НАК ППУ, причем вход радиопередатчика подключен к выходу формирователя управляющих сигналов.
Недостатком известного аналога является узкая область применения, обусловленная тем, что наземный пункт управления робототехническими комплексами обеспечивает только управление воздушными робототехническими комплексами одного типа без обработки полученной от них информации и оперативного доведения этой информации удаленным потребителям.
Также известен наземный пункт управления РТК на базе шасси специального транспортного средства (патент РФ №2407658, МПК В60Р 9/00, В60Р 3/14, опубл. 27.12.10 г., Бюл. №36). Наземный пункт управления РТК содержит коробчатый замкнутый кузов-фургон с жестким каркасом, доступ в который с внешней стороны обеспечивается через быстро разворачиваемые люки, место для размещения экипажа, двигатель, трансмиссию, ходовую часть, системы управления и электроснабжения, коробчатый кузов-фургон установлен на удлиненной базовой платформе шасси специального транспортного средства и разделен внутри жесткими перегородками на три отсека: операторский, грузовой и технологический; операторский отсек, в котором размещены шкаф для одежды, стойка для размещения аппаратуры, пульты управления внутренним освещением, генератором, отопителем и кондиционером, рабочий стол со средствами вычислительной техники и кресло оператора расположен в передней части кузова-фургона по всей его ширине, задняя часть кузова разделена на технологический и грузовой отсеки, размещенные по разные стороны кузова-фургона по ходу движения, в технологическом отсеке установлен генератор на базе приводного дизельного двигателя и размещен комплект запасных частей и принадлежностей, место установки генератора на базе приводного дизельного двигателя ограничено шумопоглощающей перегородкой, в грузовом отсеке размещен жесткий каркас сотового типа с различными размерами ячеек под три типоразмера контейнеров для размещения спецоборудования комплекса по эксплуатации радиоуправляемых мишеней, операторский отсек оснащен индивидуальной дверью и окном, технологический отсек оснащен индивидуальной дверью и двумя грузовыми люками, а грузовой отсек оборудован распашным складывающимся бортом с верхним и нижним расположением составных частей, под полом кузова-фургона в районе дверей с возможностью опускания в нижнее положение при стоянке и фиксации под полом кузова-фургона в транспортном положении установлены откидные трапы, специальное транспортное средство оснащено дополнительными баками для горючего с установленными на них топливными насосами, системой раздачи горюче-смазочных материалов из дополнительных баков.
Известный наземный пункт управления РТК имеет следующие недостатки. Из-за отсутствия шумо- и теплоизоляции операторский отсек имеет низкий уровень обитаемости. Операторский отсек характеризуется также низкой эргономичностью, так как моторная зона оператора, находящегося в кресле, ограничена пространством стола. Отсутствуют преобразователи электроэнергии высокого напряжения переменного тока, вырабатываемой электрогенератором, для обеспечения питания оборудования и внутреннего освещения. По причине отсутствия программного обеспечения электронно-вычислительной машины (ЭВМ) управления беспилотным летательным аппаратом, а также радиомодема и приемо-передающей антенны отсутствует возможность ввода программы полета БЛА в эту ЭВМ и радиообмена с БЛА. Наземный пункт управления не имеет дополнительных аккумуляторных батарей, что не позволяет обеспечивать электропитание аппаратуры и оборудования без включения электрогенератора.
Наиболее близким по своей технической сущности к заявляемому наземному пункту управления робототехническими комплексами является наземный пункт управления РТК на базе шасси специального транспортного средства (патент РФ № 2486078), МПК В60Р 9/00, В60Р 3/00, опубл. 27.06.13 г., Бюл. № 18), содержащий коробчатый замкнутый кузов-фургон с жестким каркасом, доступ в который с внешней стороны обеспечивается через быстро разворачиваемые люки, двигатель, трансмиссию, ходовую часть, системы управления и электроснабжения, коробчатый кузов-фургон установлен на платформе шасси специального транспортного средства и разделен внутри жесткими перегородками на три отсека: операторский, грузовой и технологический. Операторский отсек шумо- и теплоизолирован и расположен в передней части кузова-фургона по всей его ширине, он оснащен индивидуальной дверью и окном, в нем размещены пульты управления внутренним освещением, отопитель, кондиционер, распределительный блок электроснабжения аппаратуры и оборудования, рабочее место оператора со средствами вычислительной техники, и кресло оператора с закрепленными на полу направляющими рельсового типа для его перемещения. Грузовой и технологический отсеки расположены в средней и задней частях кузова, каждый по всей ширине кузова. В технологическом отсеке установлены средства электропитания в виде электрогенератора на базе приводного двигателя внутреннего сгорания и пневмосистема для питания пусковой установки беспилотных летательных аппаратов, технологический отсек оснащен индивидуальной дверью. Грузовой отсек оборудован распашными бортами, в нем закреплены горизонтальные направляющие для мест размещения контейнеров для транспортировки БЛА. Под полом кузова-фургона в районе дверей установлены откидные трапы, специальное транспортное средство оснащено дополнительным баком и системой раздачи горюче-смазочных материалов, наземный пункт управления снабжен приемо-передающей антенной связи с БЛА, радиомодемом управления и передачи данных БЛА и источниками бесперебойного электропитания аппаратуры и оборудования, местом для укладки пусковой установки.
Недостатком ближайшего аналога (прототипа) заявляемого устройства является узкая область его применения. Ограниченность области применения заключается в том, что в ближайшем аналоге не обеспечивается одновременное управление двумя и более разнотипными воздушными и наземными робототехническими комплексами, а также управление несколькими группами робототехнических комплексов, каждая из которых выполняет свою задачу. Также не обеспечивается оперативная обработка полученной от РТК информации и оперативная передача этой информации удаленным потребителям. В ближайшем аналоге также невозможна работа наземного пункта управления в движении с обеспечением планирования применения РТК, обработки и передачи потребителям полученной от воздушных и наземных РТК информации. Это обусловлено тем, что в данном наземном пункте управления имеется только одно рабочее место оператора и только одна приемо-передающая антенна связи с РТК с соответствующим радиомодемом управления и передачи данных РТК, отсутствуют технические средства сопряжения с радиомодемами управления и передачи данных различных типов воздушных и наземных РТК с оборудованием рабочего места оператора, отсутствуют технические средства обработки полученной от РТК информации и ее передачи удаленным потребителям как на стоянке подвижного пункта управления, так и в движении.
Техническим результатом заявляемого решения является расширение области применения наземного пункта управления РТК.
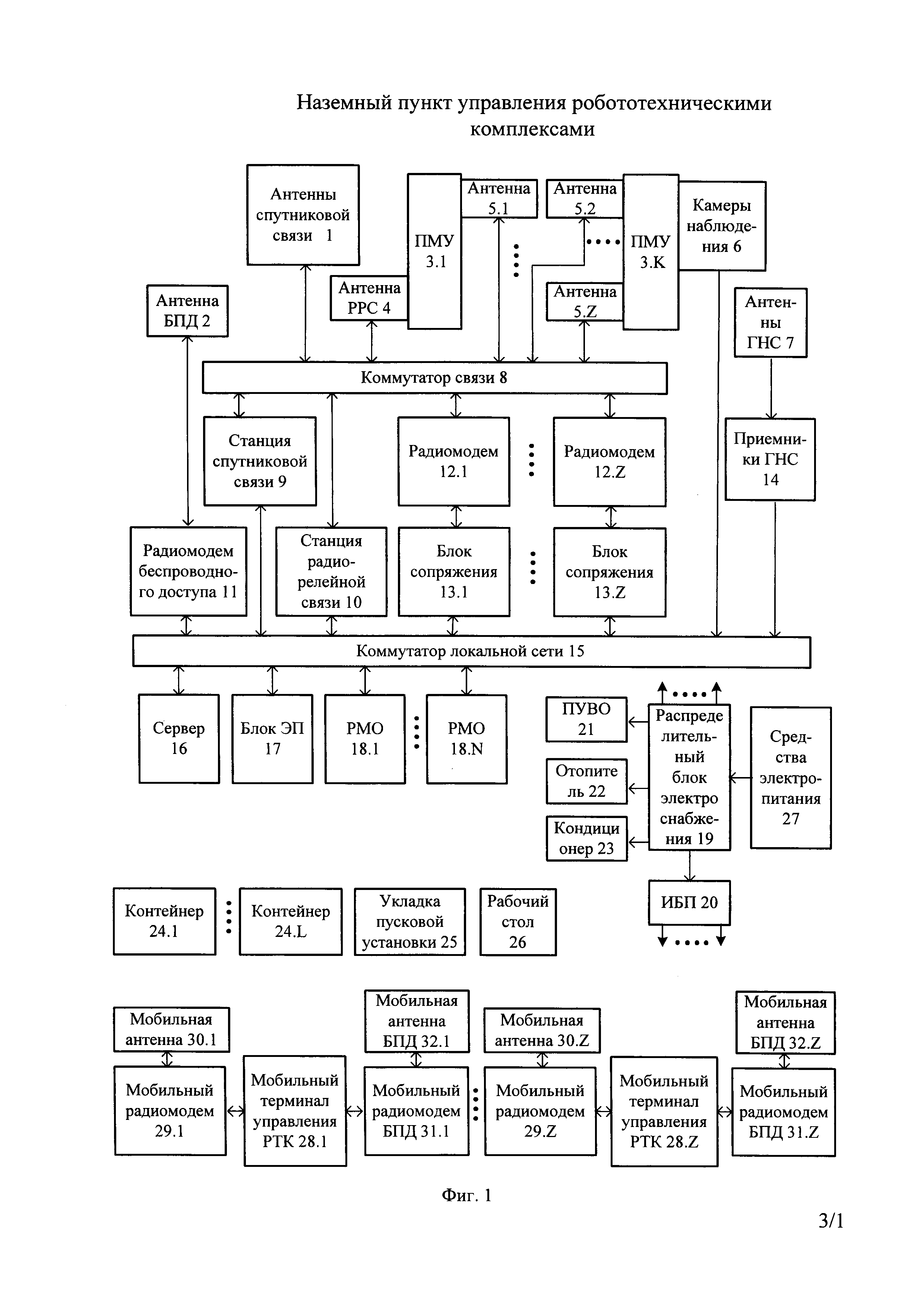
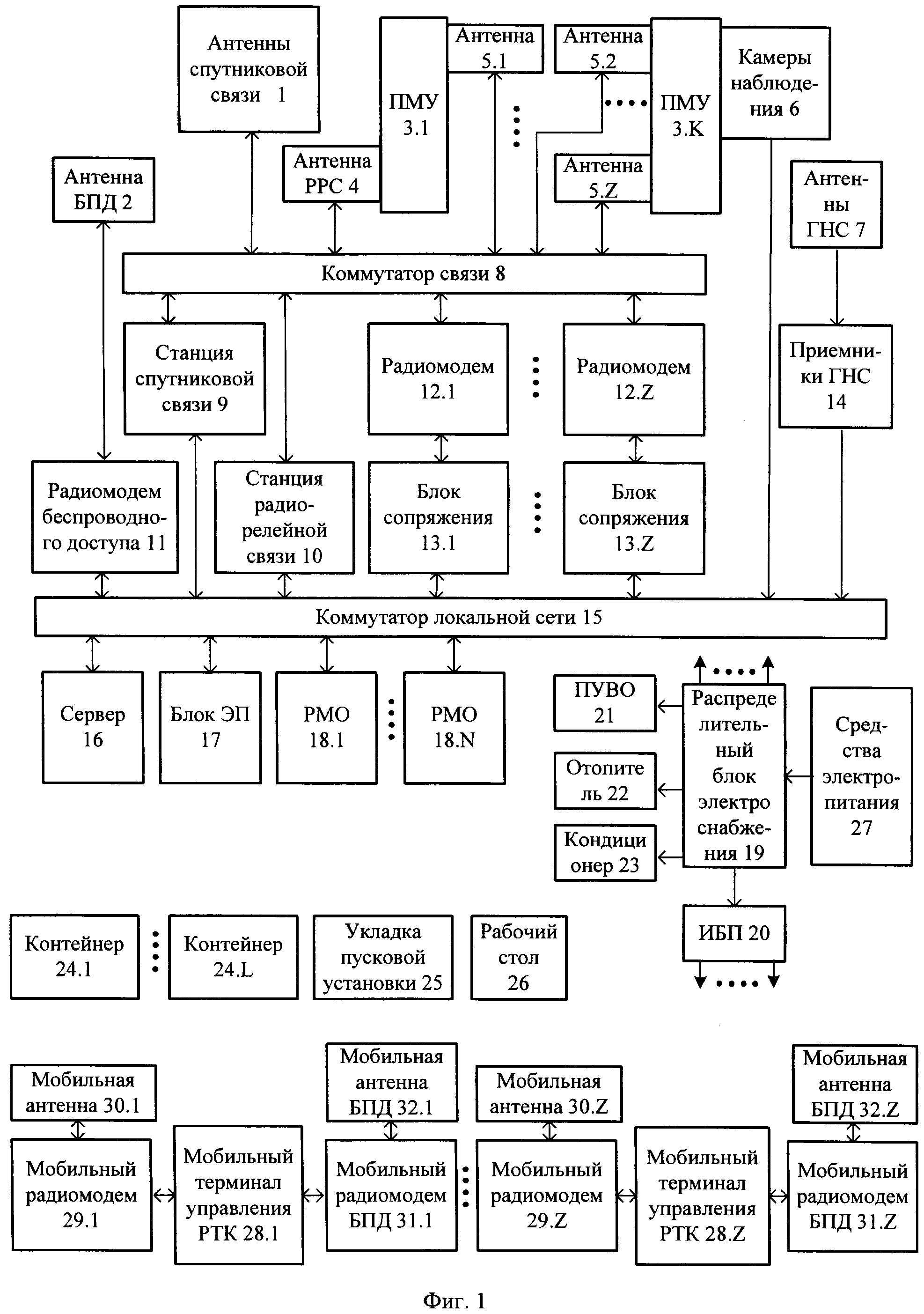
Указанный технический результат достигается тем, что в известном наземном пункте управления робототехническими комплексами, расположенном в кузове-фургоне и содержащим первую приемо-передающую антенну связи с робототехническим комплексом, первый радиомодем управления и передачи данных робототехнического комплекса, первое рабочее место оператора со средствами вычислительной техники, средство электропитания, распределительный блок электроснабжения аппаратуры и оборудования, источники бесперебойного электропитания аппаратуры и оборудования, а также места размещения контейнеров для транспортировки воздушных робототехнических комплексов и место для укладки пусковой установки воздушных робототехнических комплексов, дополнительно введены приемо-передающие антенны спутниковой связи 1, приемо-передающая антенна беспроводного доступа (БПД) 2, K ≥ 2 подъемно-мачтовые устройства (ПМУ) с установленными на них антеннами и камерами наблюдения 3.1…3.K, приемо-передающая антенна радиорелейной связи (РРС) 4, Z - 1, где Z ≥ 2, приемо-передающих антенн связи с робототехническими комплексами 5.2…5.Z, камеры наблюдения 6, антенны геонавигационных систем 7, коммутатор связи 8, станция спутниковой связи 9, станция радиорелейной связи 10, радиомодем беспроводного доступа 11, Z - 1 радиомодемов управления и передачи данных робототехнических комплексов 12.2…12.Z, Z блоков сопряжения 13.1…13.Z, приемники геонавигационных систем 14, коммутатор локальной сети 15, сервер 16, состоящий из вычислительных узлов с программным обеспечением управления группами воздушных и наземных робототехнических комплексов, обработки и передачи информации, блок электронной памяти 17, N - 1, где N ≥ 2, рабочих мест операторов со средствами вычислительной техники (РМО) 18.2…18.N, L ≥ 2 мест размещения контейнеров для транспортировки воздушных и наземных робототехнических комплексов 24.1…24.L, рабочий стол для подготовки воздушных и наземных робототехнических комплексов к использованию и последующего обслуживания 26, а также мобильные терминалы управления робототехническими комплексами 28.1…28.Z с соответствующими мобильными приемо-передающими антеннами связи с робототехническими комплексами 30.1…30.Z, мобильными радиомодемами управления и передачи данных робототехнических комплексов 29.1…29.Z, мобильными приемо-передающими антеннами беспроводного доступа 32.1…32.Z и мобильными радиомодемами беспроводного доступа 31.1…31.Z.
Приемо-передающие антенны спутниковой связи 1 подключены через коммутатор связи 8 к соответствующим канальным входам и выходам станции спутниковой связи 9, приемо-передающая антенна беспроводного доступа 2 подключена к соответствующим канальным входам и выходам радиомодема беспроводного доступа 11, приемо-передающая антенна радиорелейной связи 4 подключена через коммутатор связи 8 к соответствующим канальным входам и выходам станции радиорелейной связи 10. Z приемо-передающих антенн связи с робототехническими комплексами 5.1…5.Z подключены через коммутатор связи 8 к соответствующим канальным входам и выходам Z радиомодемов управления и передачи данных робототехнических комплексов 12.1…12.Z, станционные входы и выходы которых подключены к соответствующим канальным выходам и входам блоков сопряжения 13.1…13.Z, станционные выходы и входы которых подключены к соответствующим входам и выходам коммутатора локальной сети 15, к соответствующим входам и выходам которого подключены соответствующие станционные выходы и входы станции спутниковой связи 9, станции радиорелейной связи 10, радиомодема беспроводного доступа 11, выходы приемников геонавигационных систем 14 и камер наблюдения 6, а также соответствующие выходы и входы сервера 16, блока электронной памяти 17, N рабочих мест операторов со средствами вычислительной техники 18.1…18.N
В развернутом состоянии мобильные приемо-передающие антенны связи с робототехническими комплексами 30.1…30.Z подключены к соответствующим канальным входам и выходам мобильных радиомодемов управления и передачи данных робототехнических комплексов 29.1…29.Z, станционные входы и выходы которых подключены к соответствующим канальным выходам и входам мобильных терминалов управления робототехническими комплексами 28.1…28.Z, станционные входы и выходы которых подключены к соответствующим станционным выходам и входам мобильных радиомодемов беспроводного доступа 31.1…31.Z, канальные входы и выходы которых подключены к соответствующим мобильным приемо-передающим антеннам беспроводного доступа 32.1…32.Z.
Наземный пункт управления установлен на подвижном транспортном средстве, включая, например, средства автомобильного, железнодорожного транспорта, а также гусеничные транспортные средства. Средства вычислительной техники на каждом рабочем месте оператора включают терминальную вычислительную станцию, мониторы, джойстики, клавиатуру с манипулятором. Приемники геонавигационных систем 14 выполнены с возможностью приема сигналов спутниковых геонавигационных систем ГЛОНАСС и/или GPS. Средства электропитания 27 включают, например, первый электрогенератор 27.1 и второй электрогенератор 27.2. Подъемно-мачтовые устройства с установленными на них антеннами и камерами наблюдения 3.1…3.K выполнены с возможностью их автоматизированного подъема и опускания. Камеры наблюдения 6, включающие, например, видеокамеру 6.1 и тепловизионную камеру 6.2, выполнены с возможностью их поворота по азимуту и углу места. Приемо-передающие антенны спутниковой связи 1 включают, например, крышевую приемо-передающую антенну спутниковой связи 1.1, содержащую защитный колпак, и выносную приемо-передающую антенну спутниковой связи 1.2. Аппаратура и оборудование в кузове-фургоне установлены на виброустойчивых платформах. Каждое рабочее место оператора снабжено креслом с закрепленными на полу направляющими рельсового типа для его перемещения. Кузов-фургон шумо- и теплоизолирован.
Указанная новая совокупность существенных признаков за счет введения в состав наземного пункта управления РТК нескольких разнотипных приемо-передающих антенн связи с РТК с соответствующими радиомодемами управления и передачи данных РТК, соединенными с соответствующими блоками сопряжения, преобразующих разнотипные совокупности команд управления различными воздушными и наземными РТК к унифицированному набору команд управления, использования сервера, состоящего из вычислительных узлов с программным обеспечением управления группами воздушных и наземных РТК, обработки и передачи информации, и оснащения каждого рабочего места оператора терминальной вычислительной станцией с набором органов управления, обеспечивает на каждом рабочем месте оператора возможность одновременного управления двумя и более разнотипными воздушными и наземными РТК, а наличие нескольких взаимозаменяемых рабочих мест операторов обеспечивает возможность управления несколькими группами РТК, каждая из которых выполняет свою задачу, а также позволяет выделять часть рабочих мест операторов для оперативной обработки и передачи полученной от РТК информации. При этом возможность передачи информации удаленным потребителям обеспечивают использованием станций спутниковой и радиорелейной связи, равнодоступных для всех рабочих мест операторов. Наличие крышевой приемо-передающей антенны спутниковой связи под защитным колпаком и приемо-передающей антенны беспроводного доступа с соответствующими станциями, а также установка аппаратуры и оборудования на виброустойчивых платформах, обеспечивает возможность в движении планировать применение РТК, обрабатывать и передавать потребителям полученную от воздушных и наземных РТК информацию.
Заявленное устройство поясняется чертежами, на которых показаны:
- на фиг. 1 - общая схема наземного пункта управления робототехническими комплексами;
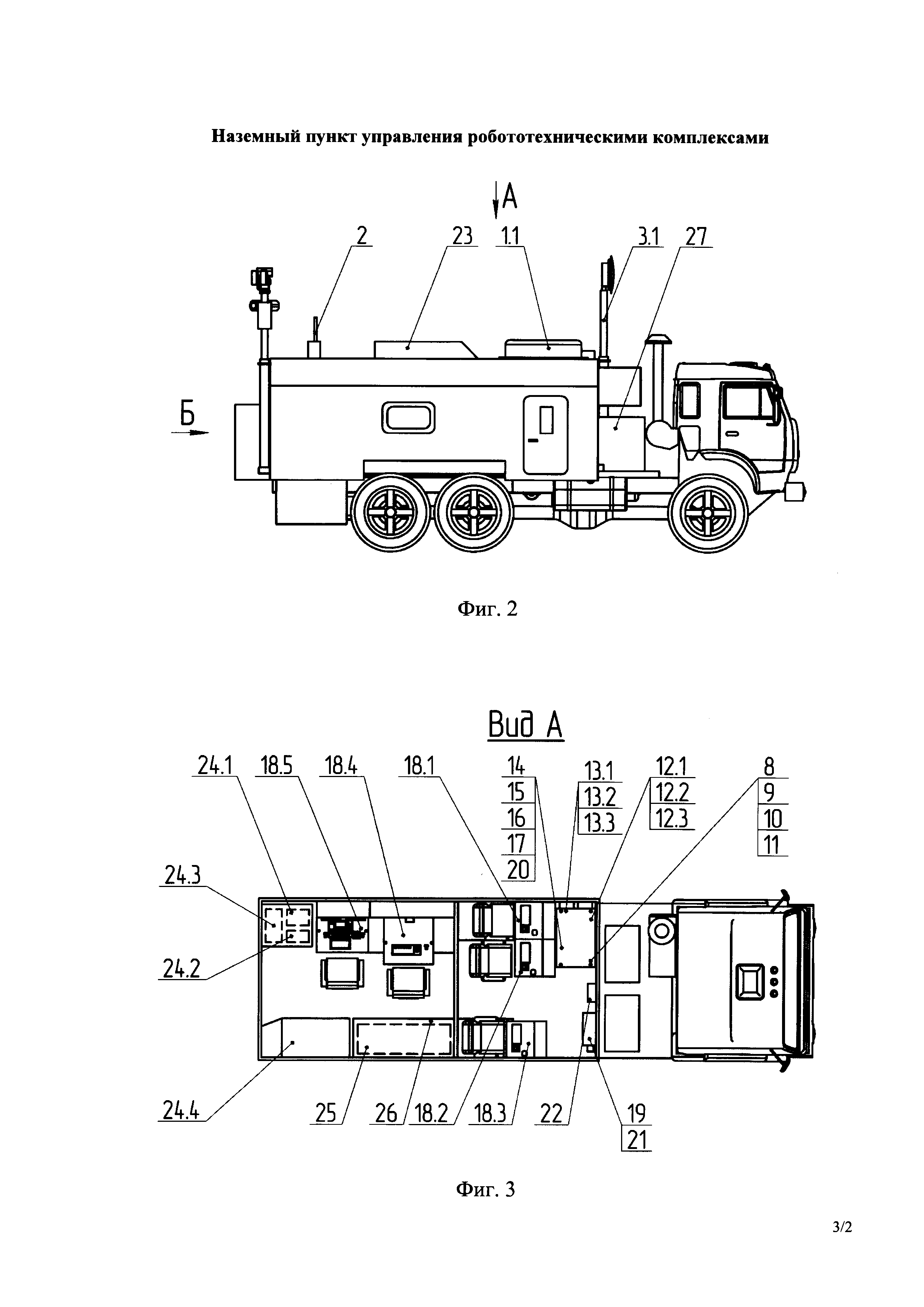
- на фиг. 2 - главный вид варианта исполнения наземного пункта управления РТК, установленного на автомобиле КАМАЗ;
- на фиг. 3 - вид сверху варианта исполнения наземного пункта управления РТК, установленного на автомобиле КАМАЗ;
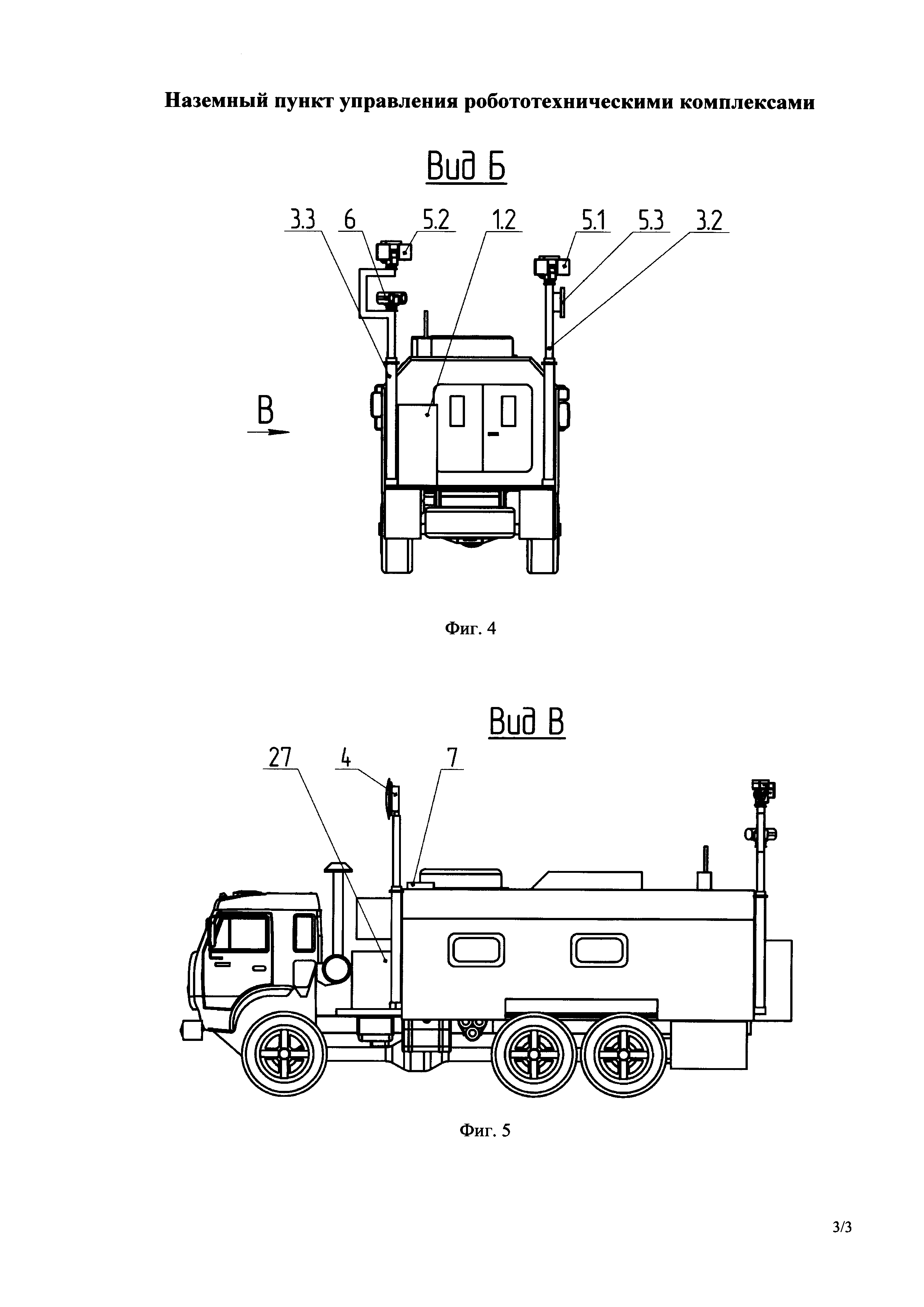
- на фиг. 4 - вид сзади варианта исполнения наземного пункта управления РТК, установленного на автомобиле КАМАЗ;
- на фиг. 5 - вид справа варианта исполнения наземного пункта управления РТК, установленного на автомобиле КАМАЗ;
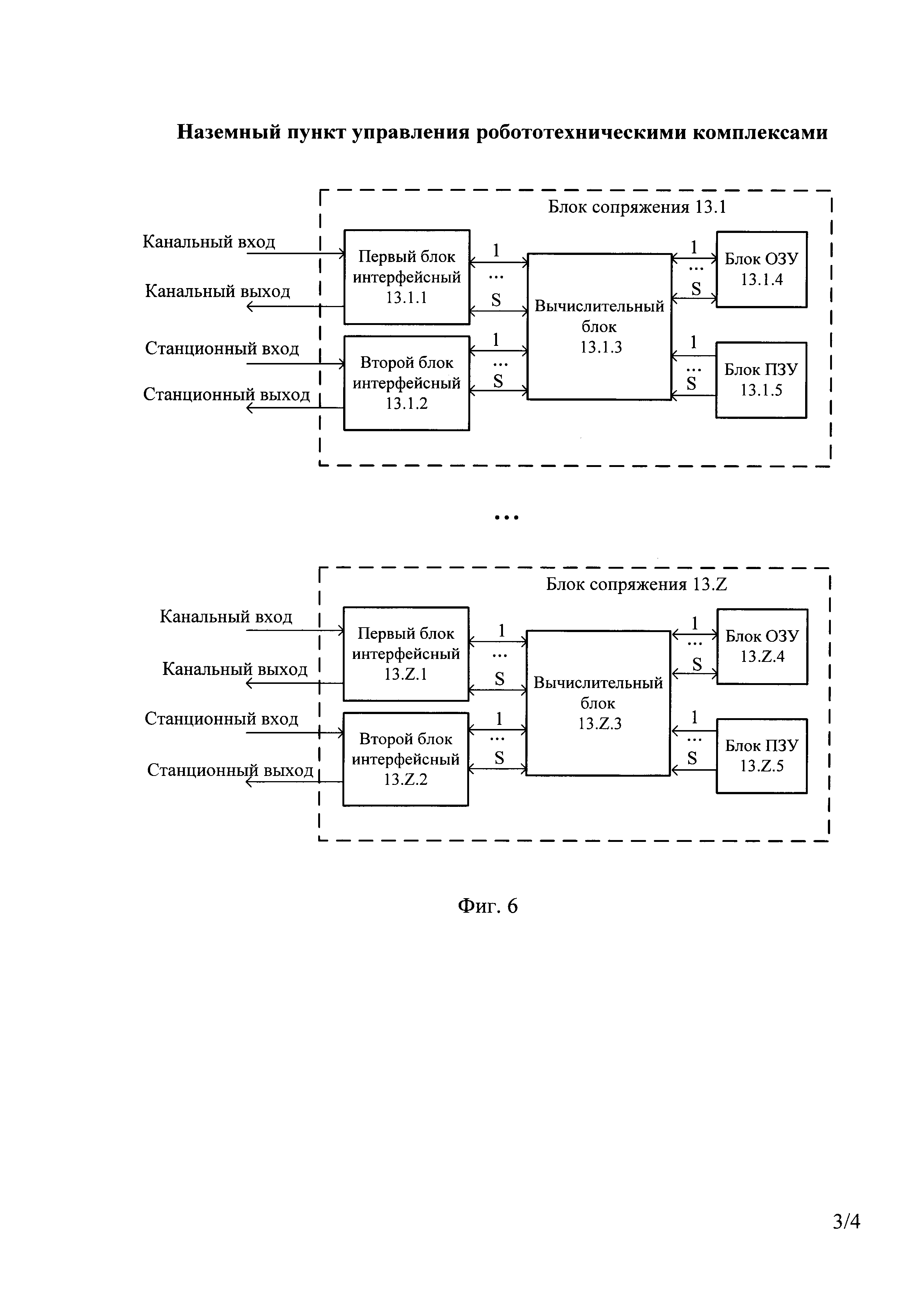
- на фиг. 6 - структурная схема блоков сопряжения 13.1…13.Z.
Общая схема наземного пункта управления робототехническими комплексами показана на фиг. 1. Наземный пункт управления робототехническими комплексами используют для управления группами робототехнических комплексов, например, таких как воздушные РТК «Орлан-10» и «Леер-3» производства АО «Специальный технологический центр», воздушный РТК «Элерон-3СВ» производства АО «ЭНИКС», воздушный РТК «Тахион» производства АО «Ижмаш-Беспилотные системы», наземный РТК «МРК- 02» разработки МГТУ им. Баумана и т.д.
Кузов-фургон наземного пункта управления робототехническими комплексами установлен на подвижном транспортном средстве, например, автомобиле КАМАЗ 43118, имеющим двигатель, трансмиссию, ходовую часть, систему управления и электроснабжения, как показано на фиг. 2.
Сущность изобретения поясняется чертежами, где на фиг. 3 изображен вид сверху одного из вариантов исполнения предложенного наземного пункта управления на автомобиле КАМАЗ 43118, на фиг. 4 изображен вид сзади, а на фиг. 5 - вид справа.
Приемо-передающие антенны спутниковой связи 1 состоят, например, из крышевой приемо-передающей антенны спутниковой связи 1.1 и выносной приемо-передающей антенны спутниковой связи 1.2.
Оборудование, установленное на крыше кузова-фургона, включает в себя крышевую приемо-передающую антенну спутниковой связи 1.1 под защитным колпаком, приемо-передающую антенну беспроводного доступа 2, антенны геонавигационных систем 7, а также установленные на подъемно-мачтовых устройствах 3.1…3.K приемо-передающую антенну радиорелейной связи 4, приемо-передающие антенны связи с робототехническими комплексами 5.1…5.Z и камеры наблюдения 6.
Крышевая приемо-передающая антенна спутниковой связи 1.1, содержащая защитный колпак, предназначена для обеспечения спутниковой связи как на стоянке наземного пункта управления, так и в движении. Данная антенна установлена на крыше кузова-фургона, например, как показано на фиг. 2. В качестве крышевой приемо-передающей антенны спутниковой связи 1.1 используют, например, антенну с фазированной решеткой «МБСЕ.464659.012», серийно выпускаемую АО «МНИРТИ». Данная антенна обеспечивает ведение спутниковой связи на скорости до 512 Кбит/с.
Наземный пункт управления также снабжен выносной приемо-передающей антенной спутниковой связи 1.2, развертываемой на стоянке. Использование выносной приемо-передающей антенны спутниковой связи 1.2 позволяет существенно повысить скорость обмена данных и устойчивость ведения связи по сравнению со случаем использования крышевой приемо-передающей антенны спутниковой связи. Выносная приемо-передающая антенна спутниковой связи 1.2, например, типа «ИУЯШ.464659.013», серийно выпускаемая АО «МНИРТИ», развертывается на стоянке наземного пункта управления на удалении до 20 метров и обеспечивает обмен данными на скорости до 2,5 Мбит/с. В транспортном положении приемо-передающая антенна спутниковой связи 1.2 крепится к задней наружной стенке кузова-купе, как показано, например, на фиг. 4.
Приемо-передающая антенна беспроводного доступа 2 обеспечивает ведение двустороннего обмена данными с развернутыми на местности мобильными терминалами управления робототехническими комплексами 28.1…28.Z и близкорасположенными пользователями. В качестве приемо-передающей антенны беспроводного доступа 2 используют, например, антенну «МНРТ.464659.048», серийно выпускаемую АО «МНИРТИ». Например, на фиг. 2 показан вариант установки приемо-передающей антенны беспроводного доступа 2 на крыше кузова-фургона.
На крыше кузова-фургона смонтированы приемные антенны геонавигационных систем 7, обеспечивающие прием информации навигации спутниковых геонавигационных систем ГЛОНАСС и/или GPS.
Подъемно-мачтовые устройства 3.1…3.K выполнены с возможностью их автоматизированного подъема и опускания, что обеспечивает оперативный перевод закрепленных на них антенн и камер наблюдения в рабочий и транспортный режим при развертывании и свертывании, соответственно, наземного пункта управления. Подъемно-мачтовые устройства обеспечивают высоту подъема закрепленных на них антенн и камер наблюдения, например, до 550 сантиметров с весом закрепленной нагрузки не менее 30 килограмм на каждом ПМУ. Например, на фиг. 2 и фиг. 4 показаны три подъемно-мачтовые устройства 3.1…3.3.
Приемо-передающая антенна радиорелейной связи 4 обеспечивает ведение двусторонней радиорелейной связи с удаленными потребителями на стоянке наземного пункта управления. В качестве приемо-передающей антенны радиорелейной связи 4 используют, например, антенну «ТИУС.464655.002», серийно выпускаемую АО «МНИРТИ». Например, на фиг. 5 показан вариант установки приемо-передающей антенны радиорелейной связи 4 на подъемно-мачтовом устройстве 3.1.
Приемо-передающие антенны связи с робототехническими комплексами 5.1…5.Z предназначены для передачи и приема команд управления и телеметрии и получения данных от используемых воздушных и наземных робототехнических комплексов. Например, используют приемо-передающую антенну связи с воздушным РТК типа «Оцелот» 5.1 и приемо-передающую антенну связи с воздушным РТК типа «Тахион» 5.2. Например, на фиг. 4 показан вариант установки приемо-передающих антенн связи с РТК 5.1 и 5.3 на подъемно-мачтовом устройстве 3.2 и приемо-передающей антенны связи с РТК 5.2 на ПМУ 3.3.
Камеры наблюдения 6, включающие, например, видеокамеру 6.1 и тепловизионную камеру 6.2, выполнены с возможностью их поворота по азимуту и углу места. Это обеспечивает возможность вести визуальное наблюдение за обстановкой вокруг наземного пункта управления днем в видимом диапазоне спектра, а ночью - в инфракрасном диапазоне спектра. В качестве видеокамеры 6.1 и тепловизионной камеры 6.2 используют, например, промышленно выпускаемую поворотную мультисенсорную систему «Пергам РТ Р-1000М» производства ОАО «Пергам-Инженеринг». Используемая видеокамера имеет разрешение 720 на 576 пикселей, а тепловизионная камера - 640 на 488 пикселей с частотой 25 кадров в секунду. Обеспечивается вращение камер наблюдения на 360 градусов с наклоном от -90 до +90 градусов. Например, на фиг. 4 показан вариант установки камер наблюдения 6 на подъемно-мачтовом устройстве 3.3.
В кузове-купе наземного пункта управления установлены коммутатор связи 8, станция спутниковой связи 9, станция радиорелейной связи 10, радиомодем беспроводного доступа 11, радиомодемы управления и передачи данных робототехнических комплексов 12.2… 12.Z, блоки сопряжения 13.1…13.Z, приемники геонавигационных систем 14, коммутатор локальной сети 15, сервер 16, состоящий из вычислительных узлов с программным обеспечением управления группами воздушных и наземных РТК, обработки и передачи информации, блок электронной памяти 17, рабочие места операторов со средствами вычислительной техники 18.1…18.N.
Коммутатор связи 8 предназначен для подключения крышевой приемо-передающей антенны спутниковой связи 1.1 или выносной приемо-передающей антенны спутниковой связи 1.2 к соответствующим канальным входам и выходам станции спутниковой связи 9, приемо-передающей антенны радиорелейной связи 4 к соответствующим канальным входам и выходам станции радиорелейной связи 10, приемо-передающих антенн связи с РТК 5.1…5.Z к соответствующим канальным входам и выходам радиомодемов управления и передачи данных РТК 12.1…12.Z. В качестве коммутатора связи 8 используют, например, коммутатор ШЕИА 468347.01, серийно выпускаемый ОАО «Завод «Электроприбор».
Станция спутниковой связи 9 предназначена для двустороннего обмена данными с удаленными потребителями как на стоянке наземного пункта управления, так и в движении. В качестве станции спутниковой связи 9 используют, например, станцию спутниковой связи «МНИРТИ - Astra. МНРТ.464512.021», серийно выпускаемую АО «МНИРТИ». Данная станция обеспечивает дуплексный информационный обмен со скоростью передачи данных до 2,5 Мбит/с при работе в диапазонах рабочих частот на прием от 10,95 до 11,45 ГГц, на передачу от 14,0 до 14,5 ГГц. Станция обеспечивает автоматическое позиционирование антенны спутниковой связи как на стоянке, так и в движении.
Станция радиорелейной связи 10 предназначена для двустороннего обмена данными с удаленными потребителями на стоянке наземного пункта управления. В качестве станции радиорелейной связи 10 используют, например, станцию радиорелейной связи РРС ЯЦТИ.464422.014 производства АО «МНИРТИ». Данная станция обеспечивает дуплексный информационный обмен со скоростью передачи данных до 34 Мбит/с при работе в диапазоне рабочих частот от 14,4 до 15,35 ГГц.
Радиомодем беспроводного доступа 11 предназначен для двустороннего обмена данными с мобильными терминалами воздушных и наземных РТК, развернутых вне наземного пункта управления и с близкорасположенными пользователями. В качестве радиомодема беспроводного доступа 11 используют, например, радиомодем базовый БШРД. ИУЯШ.464429.016 производства АО «МНИРТИ». Данная радиомодем обеспечивает дуплексный информационный обмен со скоростью передачи данных до 32 Мбит/с при работе в диапазонах рабочих частот от 5,74 до 5,83 ГГц.
Радиомодемы управления и передачи данных РТК 12.1…12.Z предназначены для управления соответствующими типами воздушных и наземных РТК и обмена данными с ними. Средства управления и передачи данных в существующих РТК, как правило, являются уникальными, что заставляет при управлении группами разнотипных РТК использовать соответствующие им типы радиомодемов управления и передачи данных РТК 12.1…12.Z, равно как и соответствующих им типы приемо-передающих антенн связи с РТК 5.1…5.Z. В качестве радиомодемов управления и передачи данных РТК 12.1…12.Z используют серийно выпускаемые радиомодемы управления и передачи данных РТК, например, таких как радиомодем управления и передачи данных воздушного РТК «Орлан-10» производства АО «СТЦ», радиомодем управления и передачи данных наземного РТК «МРК-02» разработки МГТУ им. Баумана.
Например, на фиг. 3 показан вариант установки радиомодемов управления и передачи данных РТК 12.1, 12.2 и 12.3.
Блоки сопряжения 13.1…13.Z предназначены для преобразования поступающих совокупностей команд управления и передачи данных воздушных и наземных РТК к унифицированному набору команд, и для преобразования унифицированного набора команд к соответствующему типу совокупности команд управления и передачи данных РТК.
Совокупности команд управления и передачи данных воздушных и наземных РТК поступают или от соответствующих радиомодемов управления и передачи данных РТК 12.1…12.Z или от мобильных терминалов управления и передачи данных РТК 29.1…29.Z через соответствующие мобильные радиомодемы беспроводного доступа 31.1…31.Z, радиомодем беспроводного доступа 11 и коммутатор локальной сети 15. Обмен командами из унифицированного набора команд блоки сопряжения 13.1…13.Z осуществляют через коммутатор локальной сети 15 с рабочими местами операторов со средствами вычислительной техники 18.1…18.N.
Необходимость введения блоков сопряжения 13.1…13.Z вызвана невозможностью группового управления с одного рабочего места оператора несколькими разнотипными воздушными и наземными РТК без соответствующей адаптации уникальных совокупностей команд управления и передачи данных используемых РТК.
В совокупность команд управления и передачи данных воздушных и наземных робототехнических комплексов входят, например, команды управления положением РТК в пространстве, включая координаты положения на местности, параметры траектории движения, углов крена, тангажа, скорость движения, курс, высота, скороподъемность, состояние систем РТК, включая режим работы двигателей, числа оборотов, остатка топлива, температур и давлений в системах, доступной емкости электроаккумуляторов, состояние и изменение режима работы полезной нагрузки, управление режимами работы радиолиний РТК и т.д. Каждый РТК имеет свою совокупность команд управления и передачи данных.
Блоки сопряжения 13.1…13.Z, показанные на фиг. 6, имеют одинаковую структурную схему и состоят из первого блока интерфейсного 13.1.1…13.Z.1, второго блока интерфейсного 13.1.2…13.Z.2, вычислительного блока 13.1.3…13.Z.3, блока оперативного запоминающего устройства (ОЗУ) 13.1.4…13.Z.4, блока постоянного запоминающего устройства (ПЗУ) 13.1.5…13.Z.5.
Первый блок интерфейсный 13.1.1…13.Z.1 предназначен для сопряжения блока сопряжения 13.1…13.Z с соответствующим радиомодемом управления и передачи данных РТК 12.1…12.Z. Второй блок интерфейсный 13.1.2…13.Z.2 предназначен для сопряжения блока сопряжения 13.1…13.Z с коммутатором локальной сети 15. Вычислительный блок 13.1.3…13.Z.3 предназначен для преобразования параметров поступающей совокупности команд управления и передачи данных РТК к параметрам унифицированного набора команд, и для преобразования параметров унифицированного набора команд к параметрам соответствующего типа совокупности команд управления и передачи данных данного РТК. Блок ОЗУ 13.1.4…13.Z.4 предназначен для оперативного хранения текущих значений параметров преобразования. Блок ПЗУ 13.1.5…13.Z.5 предназначен для хранения правила преобразования параметров для заданного типа РТК. Например, в блоке ПЗУ 13.1.5 хранятся правила преобразования параметров для воздушного РТК типа «Оцелот».
Канальный вход первого блока интерфейсного 13.1.1…13.Z.1, выполненный в виде S-разрядной шины, где S>2, является канальным входом соответствующего блока сопряжения 13.1…13.Z, и соединен с выходом соответствующего радиомодема управления и передачи данных РТК 12.1…12.Z. Канальный выход первого блока интерфейсного 13.1.1…13.Z.1, выполненный в виде S-разрядной шины, является канальным выходом соответствующего блока сопряжения 13.1…13.Z, и соединен с входом соответствующего радиомодема управления и передачи данных РТК 12.1…12.Z.
Станционный вход второго блока интерфейсного 13.1.2…13.Z.2, выполненный в виде S-разрядной шины, является станционным входом соответствующего блока сопряжения 13.1…13.Z, и соединен с соответствующим выходом коммутатора локальной сети 15. Станционный выход второго блока интерфейсного 13.1.2…13.Z.2,, выполненный в виде S-разрядной шины, является станционным выходом соответствующего блока сопряжения 13.1…13.Z, и соединен с соответствующим входом коммутатора локальной сети 15. входом соответствующего радиомодема управления и передачи данных РТК 12.1…12.Z. Первый блок интерфейсный 13.1.1…13.Z.1 и второй блок интерфейсный 13.1.2…13.Z.2, а также блок ОЗУ 13.1.4…13.Z.4 соединены с соответствующим вычислительным блоком 13.1.3…13.Z.3 S-разрядной двунаправленной шиной обмена данными. S-разрядный выход блока ПЗУ 13.1.5…13.Z.5 соединен с входом считывания соответствующего вычислительного блока 13.1.3…13.Z.3.
При считывании очередной команды через первый или второй блок интерфейсный она поступает в вычислительный блок, в котором в соответствии со считанными из блока ПЗУ правилом преобразования параметров этой команды для заданного типа РТК выполняют преобразование параметров этой команды из совокупности команд управления и передачи данных данного РТК к параметрам команды из унифицированного набора команд, или преобразование параметров этой команды из унифицированного набора команд к параметрам команды из соответствующего типа совокупности команд управления и передачи данных РТК.
Например, блок сопряжения 13.1, представленный на фиг. 6, предназначен для преобразования на входе совокупности команд управления воздушным робототехническим комплексом типа «Оцелот» к унифицированному набору команд, поступающих от соответствующего радиомодема управления и передачи данных робототехнических комплексов 12.1, и на выходе унифицированный набор команд к соответствующему типу совокупности команд управления данного робототехнического комплекса. Например, на фиг. 3 показан вариант установки блоков сопряжения 13.1, 13.2 и 13.3 для трех различных воздушных и наземных РТК.
Приемники геонавигационных систем (ГНС) 14 и антенны ГНС 7 предназначены для приема геонавигационной информации от ГНС, которая далее используется для управления РТК и обработки полученной от них информации. Используют, например, приемники и соответствующие им антенны ГНС геонавигационного блока ТДЦК 461413 производства ОАО «Навис», обеспечивающие прием и обработку информации местоположения наземного пункта управления от спутниковых ГНС ГЛОНАСС и GPS. Например, на фиг. 5 показан вариант установки антенн ГНС 7, а на фиг. 3 - вариант установки приемников ГНС 14.
Коммутатор локальной сети 15 предназначен для высокоскоростного двунаправленного обмена данными между подключенными к нему станцией спутниковой связи 9, станцией радиорелейной связи 10, радиомодемом беспроводного доступа 11, блоками сопряжения 13.1…13.Z, сервером 16, блоком электронной памяти 17 и рабочими местами операторов со средствами вычислительной техники 18.1…18.N, а также передачи геонавигационной информации от геонавигационных систем 14 и информации с выходов камер наблюдения 6. Коммутатор локальной сети 15 выполнен, например, как коммутатор Ethernet, снабженный не менее 24 портами 100/1000Base-T со скоростью передачи данных до 1 Гбит/с, а также 4 SFP-портами со скоростью передачи данных 10 Гбит/с, и конструктивно выполнен как типовой блок размера 19ʺ и высотой 1U.
Сервер 16, состоящий из вычислительных узлов с программным обеспечением управления группами воздушных и наземных РТК, обработки и передачи информации, предназначен для высокоскоростной обработки данных при планировании применения РТК, управлении группами воздушных и наземных РТК, обработки полученной от них информации и ее передачи потребителям. Вычислительные узлы сервера 16 представляет собой защищенные системные блоки для установки в стандартную 19ʺ стойку с исполнением, например, в виде серийно выпускаемого устройства вычислительного системного УВС 0034-11ДС, оснащенного процессорами типа IntelCore i7-3770, оперативным запоминающим устройством емкостью не менее 32 Гб, графическими процессорами типа NVIDIA GeForce GTX.
Блок электронной памяти 17 предназначен для записи и последующего считывания полученной от РТК информации. Блок электронной памяти 17 выполнен, например, на основе накопителей на жестких магнитных дисках емкостью 1 Тбайт и контроллера массива дисковых накопителей типа LSI SAS-3 3108.
В одном из вариантов исполнения станция спутниковой связи 9, станция радиорелейной связи 10, радиомодем беспроводного доступа 11, коммутатор локальной сети 15, сервер 16 и блок электронной памяти 17 конструктивно установлены в виброустойчивый телекоммуникационный шкаф, предназначенный для их защиты от вибраций и ударов, возникающих при движении наземного пункта управления РТК, как показано на фиг. 3. Шкаф представляет собой закрытую стойку шириной 19 дюймов и высотой 1600 мм, установленную на тросовых амортизаторах. Для обеспечения рабочего температурного режима шкаф имеет перфорированные стенки и оборудован четырьмя вентиляторами.
Рабочие места операторов со средствами вычислительной техники 18.1…18.N предназначены для планирования применения РТК, управления группами воздушных и наземных РТК, обмена данными с ними, обработки полученных от них данных и управления передачей информации удаленным потребителям. Также рабочие места операторов со средствами вычислительной техники 18.1…18.N обеспечивают при необходимости визуальный просмотр информации с камер наблюдения 6. Средства вычислительной техники на каждом рабочем месте оператора включают терминальную вычислительную станцию, мониторы, джойстики, клавиатуру с манипулятором. На средства вычислительной техники установлено программное обеспечение для планирования применения РТК, управления группами воздушных и наземных РТК, обмена данными с ними, обработки и управления передачей информации удаленным потребителям. Для удобства работы операторов каждое рабочее место снабжено креслом с закрепленными на полу направляющими рельсового типа для его перемещения.
Например, первый вариант рабочего места операторов со средствами вычислительной техники включает устройство вычислительное системное УВС 0018-11, видеомонитор ВМЦ-61ЖК, клавиатуру с манипулятором, джойстик. Второй вариант рабочего места операторов со средствами вычислительной техники включает, например, устройство вычислительное системное УВС 0018-11, видеомонитор монитор ВМ-2711 и два монитора ВМ-1211, клавиатуру, трекбол NSI TSX50F2-0001-MC3, джойстик CTI H23U9TZ-N82. Третий вариант рабочего места операторов со средствами вычислительной техники включает, например, устройство вычислительное системное УВС 0018-11, видеомонитор ВММ-4611, клавиатуру с трекболом NSI KSTL105F7USB, джойстик CTI H23U9TZ-N82. Например, показанные на фиг. 3 рабочие места операторов со средствами вычислительной техники 18.1-18.3 оборудованы в соответствии с первым вариантом, рабочее место оператора со средствами вычислительной техники 18.4 - с третьим вариантом, а рабочее место оператора со средствами вычислительной техники 18.5 - с вторым вариантом. Каждое рабочее места операторов обеспечивает формирование команд управления несколькими РТК, получение от них и отображение данных и телеметрической информации. Для обеспечения возможности работы рабочих мест операторов со средствами вычислительной техники в движении наземного пункта управления они смонтированы на виброустойчивых платформах.
Средства электропитания 27 предназначены для электропитания оборудования и аппаратуры наземного пункта управления, и включают, например, первый электрогенератор 27.1 и второй электрогенератор 27.2. Первый электрогенератор 27.1 предназначен для электропитания оборудования и аппаратуры наземного пункта управления, за исключением отопителя 22 и кондиционера 23. Второй электрогенератор 27.2 обеспечивает электропитание отопителя 22 и кондиционера 23. Средства электропитания 27 выполнены, например, в виде серийно выпускаемых дизель-генераторов Fischer Panda 8000 PVMV-N. Конструктивно средства электропитания 27 установлены, например, в изолированном отсеке, размещенном на шасси транспортного средства перед кузовом-фургоном по ходу движения, отсек оборудован распашными бортами.
Выход средств электропитания 27 через распределительный блок электроснабжения аппаратуры и оборудования 19 подключен к входам электропитания аппаратуры и оборудования наземного пункта управления, к выходам распределительного блока электроснабжения аппаратуры и оборудования 19 подключены в режиме зарядки входы источников бесперебойного электропитания аппаратуры и оборудования (ИБП) 20.
ИБП 20 предназначены для обеспечения электропитания аппаратуры и оборудования наземного пункта управления в движении и на стоянке при выключенных средствах электропитания 27. Например, источники бесперебойного электропитания аппаратуры и оборудования 20 используют в виде блоков ИБЭП 220-00, мощностью каждый 1400 Вт, конструктивно выполненных как блоки размера 19ʺ высотой 2U.
Пульт управления внутренним освещением (ПУВО) 21 предназначен для обеспечения комфортного освещения кузова-фургона. Отопитель 22 предназначен для обеспечения комфортной для работы операторов температуры в кузове-фургоне и выполнен, например, в виде серийно выпускаемого отопителя ОС-6-У2-24. Кондиционер 23 предназначен для кондиционирования воздуха в кузове-фургоне, выполнен, например, в виде серийно выпускаемого транспортного кондиционера КТК-5.
Места размещения контейнеров для транспортировки воздушных и наземных РТК 24.1…24.L предназначены для перевозки РТК различных типов в кузове-фургоне и снабжены соответствующими креплениями, они расположены, например, как показано, на фиг. 3. В контейнерах также перевозят мобильные приемо-передающие антенны связи с РТК 30.1…30.Z, мобильные радиомодемы управления и передачи данных РТК 29.1…29.Z, мобильные терминалы управления РТК 28.1…28.Z, мобильные радиомодемы беспроводного доступа 31.1…31.Z и мобильные приемо-передающие антенны беспроводного доступа 32.1…32.Z, используемые для развертывания соответствующих им РТК на местности. Место для укладки пусковой установки воздушных РТК 25 предназначено для перевозки пусковой установки воздушных РТК, и выполнено в виде контейнера.
Рабочий стол для подготовки воздушных и наземных РТК к использованию и последующего обслуживания 26 позволяет выполнять различные операции технической эксплуатации РТК с габаритами, например, длиной до 200 сантиметров, шириной до 55 сантиметров и высотой до 80 сантиметров.
В развернутом состоянии мобильные приемо-передающие антенны связи с РТК 30.1…30.Z подключены к соответствующим канальным входам и выходам мобильных радиомодемов управления и передачи данных РТК 29.1…29.Z, станционные входы и выходы которых подключены к соответствующим канальным выходам и входам мобильных терминалов управления и передачи данных РТК 29.1…29.Z, станционные входы и выходы которых подключены к соответствующим станционным выходам и входам мобильных радиомодемов беспроводного доступа 31.1…31.Z, канальные входы и выходы которых подключены к соответствующим мобильным приемо-передающим антеннам беспроводного доступа 32.1…32.Z.
Данное техническое решение обеспечивает возможность управления РТК с рабочих мест операторов со средствами вычислительной техники 18.1…18.N или с использованием соответствующих мобильных терминалов управления и передачи данных РТК 29.1…29.Z, причем использование мобильных антенн и радиомодемов беспроводного доступа в обоих вариантах управления обеспечивает оперативный прием полученной от РТК информации операторами рабочих мест наземного пункта управления.
В качестве мобильных приемо-передающих антенн связи с РТК 30.1…30.Z, мобильных радиомодемов управления и передачи данных РТК 29.1…29.Z, мобильных терминалов управления РТК 28.1…28.Z используют соответствующие серийно выпускаемые технические средства воздушных и наземных РТК, таких как воздушные РТК «Орлан-10» и «Леер-3» производства АО «Специальный технологический центр», воздушный РТК «Элерон-3СВ» производства АО «ЭНИКС», воздушный РТК «Тахион» производства АО «Ижмаш-Беспилотные системы», наземный РТК «МРК- 02» разработки МГТУ им. Баумана и т.д.
В качестве мобильных радиомодемов беспроводного доступа 31.1…31.Z используют, например, радиомодем абонентский БШРД.ИУЯШ.464429.017 производства АО «МНИРТИ». В качестве мобильных антенн беспроводного доступа 32.1…32.Z используют, например, антенны беспроводного доступа «МНРТ.464659.044», серийно выпускаемые АО «МНИРТИ».
Наземный пункт управления робототехническими комплексами применяют следующим образом. После размещения контейнеров для транспортировки воздушных и наземных робототехнических комплексов 24.1…24.L наземный пункт управления выдвигают в район использования РТК. После прибытия в пункт назначения выполняют подготовку воздушных и наземных РТК к использованию на рабочем столе 26. Выгружают пусковую установку воздушных РТК 25, воздушные и наземные РТК и соответствующие им мобильные терминалы управления РТК 28.1…28.Z, мобильные приемо-передающие антенны связи с РТК 30.1…30.Z и радиомодемы управления и передачи данных РТК 29.1…29.Z, а также мобильные приемо-передающие антенны беспроводного доступа 32.1…32.Z и радиомодемы беспроводного доступа 31.1…31.Z и соединяют их в развернутом состоянии. От средств электропитания 27 или заряженных источников бесперебойного электропитания аппаратуры и оборудования 20 через распределительный блок электроснабжения 19 включают питание оборудования и аппаратуры наземного пункта управления. При необходимости от средств электропитания 27 питают отопитель 22 и кондиционер 23, а также заряжают ИБП 20.
До выдвижения, в процессе выдвижения с электропитанием от заряженных источников бесперебойного электропитания аппаратуры и оборудования 20, либо по прибытию в заданный район наземного пункта планируют применение групп воздушных и наземных РТК с использованием сервера 16 и рабочих мест операторов 18.1…18.N.
С использованием пусковой установки воздушных РТК 25 запускают подготовленные к полету воздушные РТК. Приводят в действие подготовленные к использованию наземные РТК. Управление воздушными и наземными РТК и обмен данными с ними осуществляют по радиоканалам управления и передачи данных с использованием развернутых на местности мобильных терминалов управления РТК 28.1…28.Z с соответствующими мобильными приемо-передающими антеннами связи с РТК 30.1…30.Z и радиомодемами управления и передачи данных РТК 29.1…29.Z, включая мобильные приемо-передающие антенны БПД 32.1…32.Z и радиомодемы БПД 31.1…31.Z. Использование мобильных приемо-передающих антенн и радиомодемов БПД обеспечивает обмен командами управления и данными через приемо-передающую антенну БПД 2, радиомодем беспроводного доступа 11 и блоков сопряжения 13.1…13.Z через коммутатор локальной сети 15 от любого из рабочих мест операторов со средствами вычислительной техники 18.1…18.N. Использование приемо-передающих антенн связи с РТК 5.2…5.Z с соответствующими им радиомодемами управления и передачи данных РТК 12.2…12.Z и блоков сопряжения 13.1…13.Z, подключенных через коммутатор локальной сети 15 к РМО 18.1…18.N, обеспечивает возможность управления группами РТК, в том числе напрямую без мобильных терминалов управления РТК 28.1…28.Z. Каждое рабочее место оператора со средствами вычислительной техники 18.1…18.N, оснащенное терминальной вычислительной станцией, мониторами, джойстиками, клавиатурой с манипулятором обеспечивает управление группой воздушных и наземных РТК, обмен данными с ними, обработку полученных от них данных и управление передачей информации удаленным потребителям. При недостатке вычислительной производительности рабочего места оператора требуемая задача решается использованием вычислительной мощности сервера 16, содержащего вычислительные узлы с соответствующим программным обеспечением.
Полученные от РТК данные большого объема записывают в блок электронной памяти 17. Рабочие места операторов со средствами вычислительной техники 18.1…18.N в зависимости от выполняемых задач подвижным пунктом управления распределяют для управления группами РТК, обмена данными с ними, обработки полученных от них данных и управления передачей информации потребителям. Передачу информации удаленным потребителям на стоянке подвижного пункта управления выполняют с использованием станции РРС 10 с антенной РРС 4, поднимаемой на подъемно-мачтовом устройстве, а также с использованием станции спутниковой связи 9 и, например, выносной приемо-передающей антенны спутниковой связи 1.2. Если выносную приемо-передающую антенну спутниковой связи 1.2 не развертывают, а также в движении подвижного пункта управления, информацию удаленным потребителям передают по каналу спутниковой связи с использованием, например, крышевой антенны спутниковой связи 1.1. Передачу информации близкорасположенным потребителям и прием данных от них выполняют с использованием радиомодема БПД 11 с соответствующей антенной 2. Информацию о местоположении наземного пункта управления выделяют из сигналов спутниковых геонавигационных систем ГЛОНАСС и/или GPS с применением антенн ГНС 7 и приемников ГНС 14 и используют при управлении РТК и обработке полученных от них данных.
Для контроля обстановки вокруг наземного пункта управления в светлое время суток визуальное наблюдение ведут с использованием видеокамеры 6.1, а в темноте - с использованием тепловизионной камеры 6.2 с возможностью вращения камер наблюдения вокруг наземного пункта управления и относительно линии горизонта, причем информация наблюдения может выводиться на любое рабочее место оператора со средствами вычислительной техники 18.1…18.N.
После окончания работ свертывание наземного пункта управления РТК выполняют в обратном порядке. При перемещениях наземного пункта управления РТК в движении планируют повторное применение групп воздушных и наземных РТК, а также выполняют обработку полученных от РТК данных и передают обработанную информацию удаленным потребителям.
Опытная эксплуатация изготовленного экспериментального образца наземного пункта управления РТК показала правильность и эффективность предлагаемых технических решений. Проведенные эксперименты подтверждают, что при использовании предлагаемого наземного пункта управления РТК обеспечивается расширение области его применения.
Способ автоматизированного выявления компактных групп взаимодействующих воздушных объектов
Способ формирования канала для передачи оптического сигнала между компонентами электронного модуля
Способ терморихтовки металлических пластин и устройство для его осуществления
Способ образования канала для передачи оптического сигнала между компонентами электронного модуля
Устройство для терморихтовки металлических пластин
Переменный аттенюатор
Способ управления инерционным приводом антенны, обеспечивающий устойчивое сопровождение интенсивно маневрирующих и высокоскоростных воздушных объектов
Способ траекторного управления беспилотным летательным аппаратом для облета рельефа местности в вертикальной плоскости
Способ и система совместной обработки измерений дальности и скорости для многодиапазонной радиолокационной системы кругового обзора
Датчик температуры электронного модуля
Способ обнаружения сглаженных блоков электронного изображения с использованием вейвлет преобразования
Способ обнаружения модификации электронного изображения (варианты)
Способ уменьшения шума электронного изображения
Способ синхронизации цифрового водяного знака электронного изображения
Способ кодирования и декодирования видеоинформации на основе трехмерного дискретного косинусного преобразования
Способ кодирования и декодирования видеоинформации
Способ аутентификации электронного изображения
Способ формирования помехоустойчивых радиосигналов
Способ формирования помехоустойчивых радиосигналов
Способ компенсации узкополосных помех

