Результат интеллектуальной деятельности: УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ
Вид РИД
Изобретение
Изобретение относится к области авиационного приборостроения и может быть применено в интегрированных системах, использующих информацию с зашумленным сигналом, в частности, от спутниковой навигационной системы (СНС), и обеспечивающих целостность навигационной информации системы.
Известны устройства обработки сигналов [1], использующие информацию резервированных систем счисления пути с мажоритарно-допусковым контролем и корректора типа радиосистемы ближней навигации либо СНС для комплексной обработки сигналов с помощью фильтра Калмана.
Наиболее близким аналогом заявленного изобретения является устройство обработки сигналов, содержащее три системы счисления пути (датчики первичной информации), корректор (бортовой измеритель спутниковой навигационной системы, бортовой измеритель азимута и дальности (VOR/DME)), блок вычислительных устройств, два сумматора, фильтр и формирователь сигнала тревоги, при этом каждая система счисления пути подключена выходом к соответствующему входу блока вычислительных устройств, который выходом связан с первым входом первого сумматора, вторым входом подключенного к выходу корректора, а также с первым входом второго сумматора, причем первый сумматор выходом, а второй сумматор вторым входом подключены к фильтру.
В известном устройстве выходной сигнал системы счисления пути является интегральным, зависящим только от степени резервирования и величины допуска на погрешность определения местоположения воздушного судна (ВС). В известном устройстве выходной сигнал сохраняет достоинства и в значительной степени снижает влияние недостатков каждого из измерителей.
Недостатки известного устройства заключаются в следующем:
- достоверность выходного сигнала определяется исправностью измерителей, фильтра (вычислителя) и мажоритарно-допускового контроля;
- отказ 2-х из трех систем счисления пути является отказом устройства;
- выходной сигнал устройства может содержать выходные сигналы системы счисления пути, характеризуемые постепенным отказом и, соответственно, высоким уровнем погрешности, что в свою очередь понижает уровень точности устройства обработки сигналов;
- невозможность формирования и выдачи признака, указывающего на изменение вероятности нахождения ВС в заданном коридоре;
- невозможность диагностики оставшихся систем счисления пути в случае отказа одной.
Техническим результатом заявленного изобретения является повышение надежности устройства обработки сигналов, обеспечивающего:
- повышение глубины контроля троированной системы счисления пути;
- контроль каждой из трех систем счисления пути с помощью «эталонного описания» погрешностей (введения «аналитической» избыточности [2]);
- диагностику отказавшей системы счисления пути и исключение ее из дальнейшего использования;
- формирование интегрального выходного сигнала системы счисления пути с учетом критерия минимума погрешности измерителя;
- формирование интегрального выходного сигнала системы счисления пути с заданным риском невыявленного отказа реализуемого навигационного режима комплексной обработки информации (КОИ);
- формирование и выдачу признака, указывающего на изменение вероятности нахождения ВС в заданном коридоре.
Технический результат достигается устройством обработки сигналов, содержащим первую, вторую и третью системы счисления пути, корректор, первый блок вычислительных устройств, первый и второй сумматоры, первый фильтр, а также формирователь сигнала тревоги, при этом каждая система счисления пути подключена выходом к соответствующему входу первого блока вычислительных устройств, который выходом связан с первым входом первого сумматора, вторым входом подключенного к выходу корректора, а также с первым входом второго сумматора, причем первый сумматор выходом, а второй сумматор вторым входом подключены к первому фильтру, при этом, согласно изобретению, дополнительно введены третий, четвертый и пятый сумматоры, второй, третий и четвертый фильтры, задатчик, второй и третий блоки вычислительных устройств, селекторное устройство, формирователь сигнала тревоги, входом соединенный с выходом второго сумматора и выходом которого является признак нарушения границы заданного коридора, а также переключатель, первым входом соединенный с выходом блока вычислительных устройств, а выходом с первым входом первого сумматора и входом задатчика, при этом третий, четвертый и пятый сумматоры первыми входами подключены соответственно к выходам первой, второй и третьей систем счисления пути, вторыми входами к выходу корректора, а выходами к первым входам второго, третьего и четвертого фильтров соответственно, при этом упомянутые фильтры своими вторыми входами подключены соответственно к первому, второму и третьему выходам задатчика, четвертым выходом подключенного ко входу третьего блока вычислительных устройств, второй блок вычислительных устройств включает последовательно соединенные блок определения границы работоспособности i-той системы счисления пути, подключенный первым входом к пятому выходу задатчика, вторым входом к выходу третьего блока вычислительных устройств, третьим, четвертым и пятым входами к выходам соответственно второго, третьего и четвертого фильтров, блок определения функции потерь, блок определения функции близости, подключенный вторым входом к шестому выходу задатчика, блок определения рейтинга i-той системы счисления пути, связанный выходом через селекторное устройство со вторым входом переключателя.
Введенные в известное устройство функциональные элементы, а также новые коммутационные связи функционально представляют собой формирователь статистического контроля систем счисления пути.
На фиг. 1 приведена блок-схема предлагаемого устройства обработки сигналов, где:
1 - первая система счисления пути (БИНС 1);
2 - вторая система счисления пути (БИНС 2);
3 - третья система счисления пути (БИНС 3);
4 - корректор (СНС, РСБН, VOR/DME);
5 - первый блок вычислительных устройств;
6 - первый сумматор;
7 - первый фильтр;
8 - второй сумматор;
9 - формирователь сигнала тревоги,
10 - третий сумматор;
11 - четвертый сумматор;
12 - пятый сумматор;
13 - второй фильтр;
14 - третий фильтр;
15 - четвертый фильтр;
16 - второй блок вычислительных устройств (блок ранжировки навигационных параметров системы счисления пути), включающий:
17 - блок определения границы работоспособности i-ой системы счисления пути;
18 - блок определения функции потерь;
19 - блок определения функции близости;
20 - блок определения рейтинга i-й системы счисления пути;
21 - селекторное устройство;
22 - переключатель;
23 - задатчик;
24 - третий блок вычислительных устройств;
25-53 - информационные шины, передающие управляющие сигналы.
Предложенное устройство обработки сигналов включает три системы счисления пути (1), (2), (3), которые подключены через информационные шины (25), (26), (27) к соответствующим входам блока вычислительных устройств (5) и сумматоров (10), (11), (12). Блок вычислительных устройств (5) выходом подключен через информационную шину (29) к первому входу сумматора (8), а также первому входу выключателя (22), второй вход которого через шину (45) подключен к селекторному устройству (21), а выход - к первому входу сумматора (6) посредством шины (53). Сумматор (8) своим выходом подключен через шину (32) ко входу формирователя сигнала тревоги (9), а вторым входом через шину (31) с выходом фильтра (7), который входом связан посредством шины (30) с выходом сумматора (6). Сумматоры (10), (11), (12) вторыми входами подключены через информационную шину (28) к выходу корректора (4), который посредством шины (28) соединен со вторым входом сумматора (6). Сумматоры (10), (11), (12) своими выходами подключены через шины (35), (36), (37) к первым входам фильтров (13), (14), (15). Последние вторыми входами через шины (46), (47), (48) подключены к первому, второму и третьему выходам задатчика (23), а выходами связаны с блоком вычислительных устройств (16). Задатчик (23) четвертым выходом посредством шины (49) соединен со входом блока вычислительных устройств (24), а пятым и шестым выходами связан с блоком вычислительных устройств (16). Последний включает последовательно соединенные через шины (41), (42), (43) блок определения границы работоспособности i-той системы счисления пути (17), блок определения функции потерь (18), блок определения функции близости (19), а также блок определения рейтинга i-той системы счисления пути (20), соединенный выходом с помощью шины (44) со входом селекторного устройства (21). При этом блок определения границы работоспособности i-той системы счисления пути (17) подключен первым входом через шину (50) к пятому выходу задатчика (23), вторым входом через шину (52) - к выходу блока вычислительных устройств (24), а третьим, четвертым и пятым входами посредством шин (38), (39), (40) - к выходам фильтров (13), (14), (15). Блок определения функции близости (19) подключен вторым входом через шину (51) к шестому выходу задатчика (23). При этом последний своим входом соединен через шину (53) с выходом переключателя (22).
Предложенное устройство содержит следующие вновь введенные функциональные элементы: третий (10), четвертый (11) и пятый (12) сумматоры, второй (13), третий (14) и четвертый (15) фильтры, задатчик (23), второй (16) и третий (24) блоки вычислительных устройств, селекторное устройство (21), переключатель (22), а также формирователь сигнала тревоги (9).
Третий сумматор (10) служит для определения позиционных  ,
,  и скоростных
и скоростных  ,
,  измерений, равных, соответственно, разности по позиционным параметрам (λсч)1, (ϕсч)1 первой системы счисления пути (1) и корректора (4) ϕк, λк и по скоростным параметрам разности
измерений, равных, соответственно, разности по позиционным параметрам (λсч)1, (ϕсч)1 первой системы счисления пути (1) и корректора (4) ϕк, λк и по скоростным параметрам разности  ,
,  первого системы счисления пути (1) и корректора (4)
первого системы счисления пути (1) и корректора (4)  ,
,  .
.
Четвертый сумматор (11) позволяет определить позиционные  ,
,  и скоростные
и скоростные  ,
,  измерения, равные, соответственно, разности по позиционным параметрам (λсч)2, (ϕсч)2 второй системы счисления пути (2) и корректора (4) ϕк, λк и по скоростным параметрам разности
измерения, равные, соответственно, разности по позиционным параметрам (λсч)2, (ϕсч)2 второй системы счисления пути (2) и корректора (4) ϕк, λк и по скоростным параметрам разности  ,
,  второй системы счисления пути (2) и корректора (4)
второй системы счисления пути (2) и корректора (4)  ,
,  .
.
Пятый сумматор (12) определяет позиционные  ,
,  и скоростные измерения
и скоростные измерения  ,
,  , равные, соответственно, разности по позиционным параметрам (λсч)3, (ϕсч)3 третьей системы счисления пути (3) и корректора (4) ϕк, λк и по скоростным параметрам разности скоростей
, равные, соответственно, разности по позиционным параметрам (λсч)3, (ϕсч)3 третьей системы счисления пути (3) и корректора (4) ϕк, λк и по скоростным параметрам разности скоростей  ,
,  третьей системы счисления пути (3) и корректора (4)
третьей системы счисления пути (3) и корректора (4)  ,
,  .
.
Второй фильтр (13) является оптимальным фильтром для определения оценок ошибок координат местоположения первой системы счисления пути  и
и  .
.
Матричное дифференциальное уравнение фильтра:

где:
 - оценка вектора ошибок системы счисления пути, размерность {4; 0};
- оценка вектора ошибок системы счисления пути, размерность {4; 0};
F - матрица состояния (уравнения ошибок системы пути), размерность {4; 4};
k - матричный коэффициент усиления;
z=Нх+V - вектор измерений, поступающий на вход фильтра;
H - матрица измерений, размерность {2; 4};
х - вектор ошибок БИНС;
V - вектор шумов измерений.
Для второго фильтра (13) вектор измерений имеет вид  ,
,  ,
,  ,
,  .
.
Третий фильтр (14) - оптимальный фильтр для определения оценок ошибок координат местоположения второй системы счисления пути  и
и  . Структура фильтра такая же (уравнение 1), а вектор измерений -
. Структура фильтра такая же (уравнение 1), а вектор измерений -  ,
,  ,
,  ,
,  .
.
Четвертый фильтр (15) - оптимальный фильтр для определения оценок ошибок координат местоположения третьей системы счисления пути  и
и  , структура фильтра такая же (уравнение 1), а вектор измерений -
, структура фильтра такая же (уравнение 1), а вектор измерений -  ,
,  ,
,  ,
,  .
.
Второй блок вычислительных устройств (16) определяет:
- границы работоспособности i-й инерциальной системы (блок 17):
а) верхний интервал Δ=±2σ - заданный уровень погрешности системы счисления пути;
б) ΔХЭ.О. - «эталонное описание» погрешности системы счисления пути с заданным уровнем погрешности датчиков первичной информации (гироскопов и акселерометров);
в)  - математическое ожидание оцененного значения погрешности i-й системы счисления пути.
- математическое ожидание оцененного значения погрешности i-й системы счисления пути.
Если величина математического ожидания текущей оценки погрешности i-й системы счисления пути  превышает границу ±Δ, то i-я система счисления пути не соответствует заданному уровню точности.
превышает границу ±Δ, то i-я система счисления пути не соответствует заданному уровню точности.
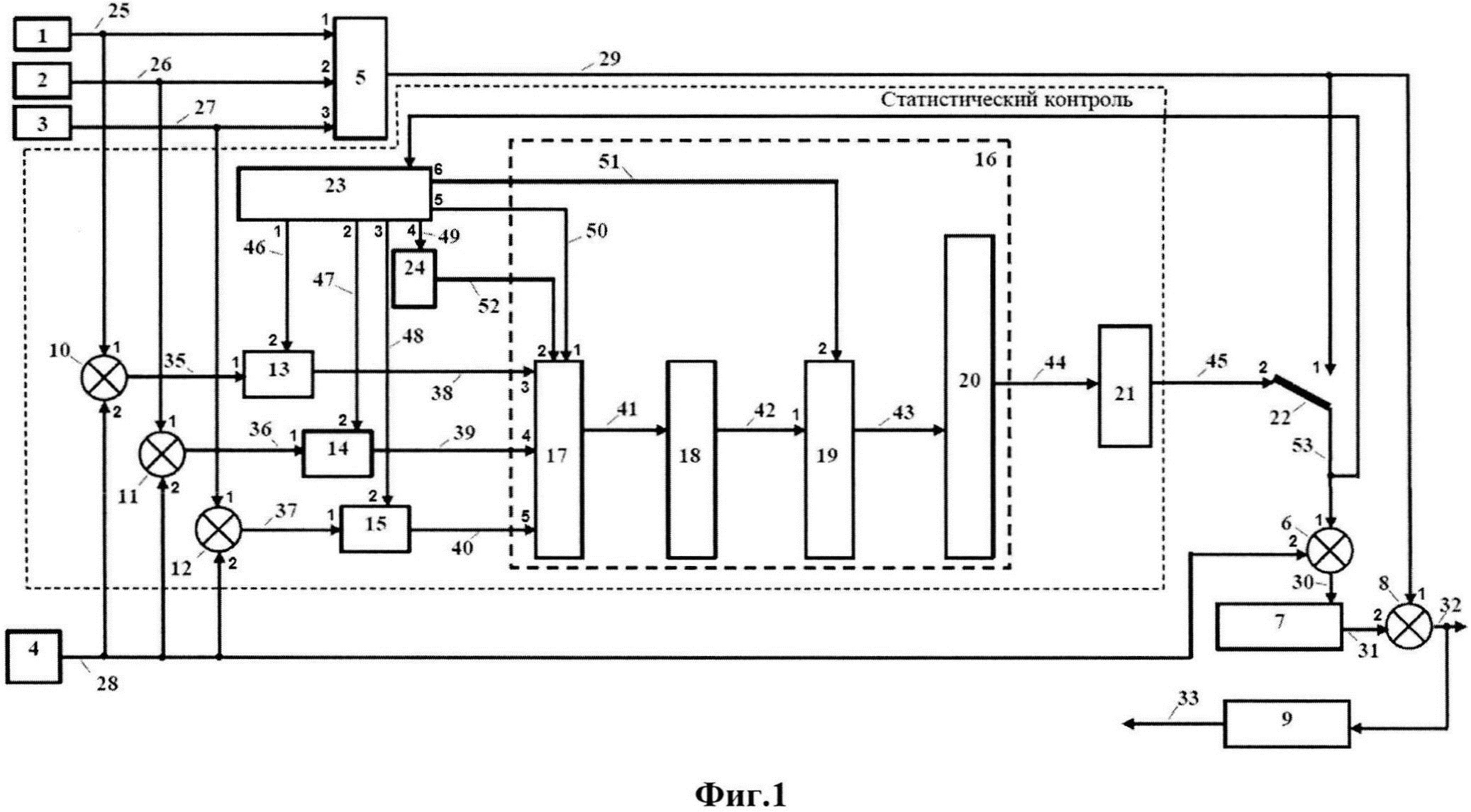
- функции потерь  (блок 18) i-й системы счисления пути, когда
(блок 18) i-й системы счисления пути, когда  (фиг. 2):
(фиг. 2):
 ,
,
Для  расчеты проводятся относительно ее зеркального отображения в положительной области.
расчеты проводятся относительно ее зеркального отображения в положительной области.
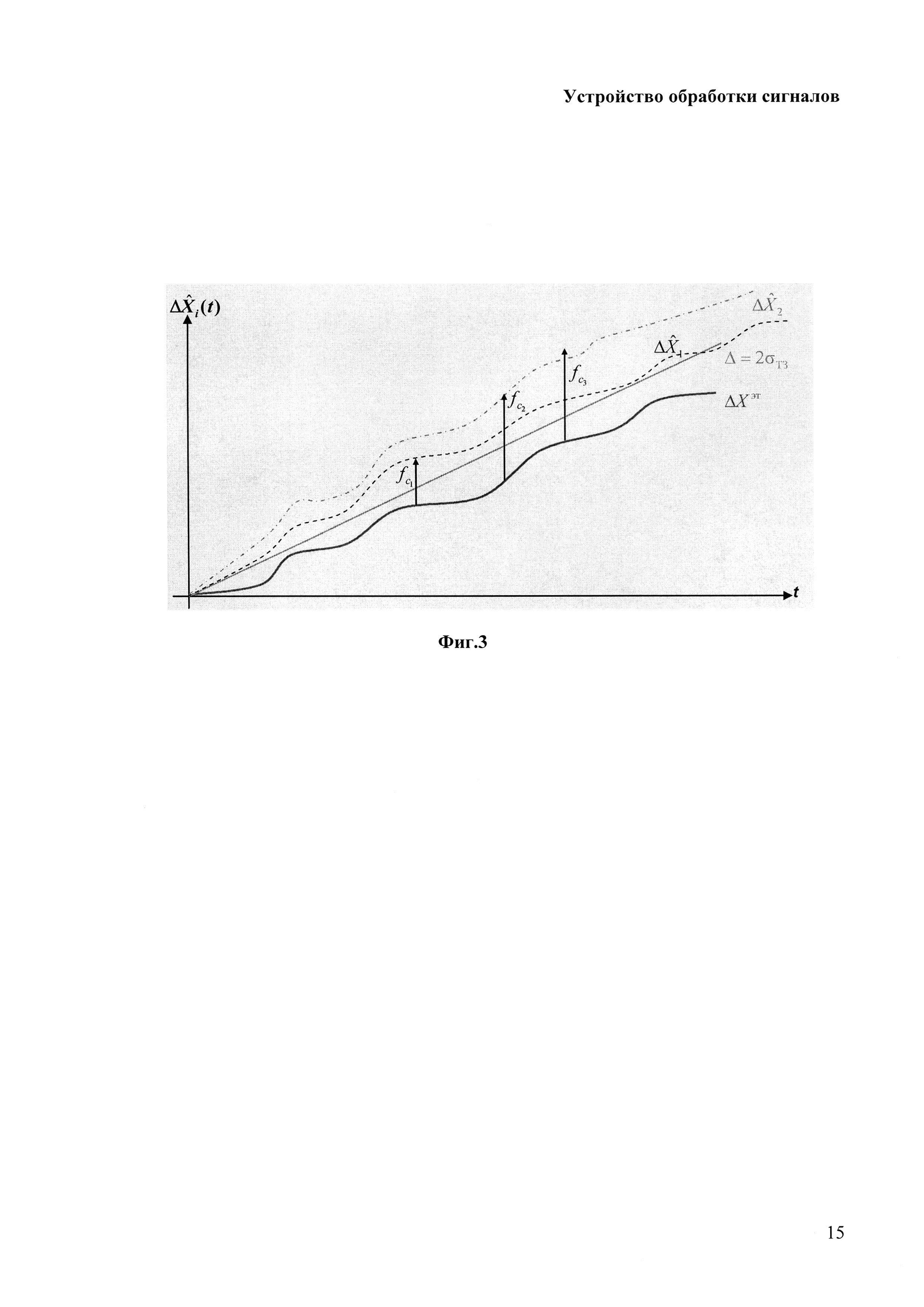
- функции близости (блок 19)  , если
, если  (фиг. 3):
(фиг. 3):

Система счисления пути, характеризующаяся минимальной функцией близости, считается лучшей  .
.
- рейтинг i-той системы счисления пути (блок 20) методом ранжирования погрешностей трех систем счисления пути с помощью функции потерь, величины допустимого значения Δ и величины «эталонного описания» погрешности с учетом условий:




Если функции потерь по  или по
или по  принадлежат различным областям, то рейтинг i-той системы счисления пути устанавливается по радиальному значению
принадлежат различным областям, то рейтинг i-той системы счисления пути устанавливается по радиальному значению  функции потерь
функции потерь
За выходные параметры принимается выход той системы счисления пути, рейтинг которой минимален. Если несколько систем имеют одинаковые наилучшие характеристики, то для дальнейшей обработки принимается первая по номеру i из них.
Если все три системы принадлежат к rat III [i=1; i=2; i=3] ∈ III, то за выходные параметры ИС принимается выход той системы, для которой функция близости  к «эталонному описанию» минимальна (фиг. 3):
к «эталонному описанию» минимальна (фиг. 3):
ϕвых(t)=ϕi(t), для которой  .
.
Селекторное устройство (21) служит для формирования составляющих вектора Yвыбр (ϕвыбр. - широта, λвыбр. - долгота,  ,
,  ) интегральных выходных параметров трех систем счисления пути, учитывающие рейтинги первичных датчиков информации.
) интегральных выходных параметров трех систем счисления пути, учитывающие рейтинги первичных датчиков информации.
Задатчик (23) предназначен для ввода и хранения следующей информации:
- признака модели Земли (СК-42, ПЗ-90, WGS-84, и т.д.),
- заданный допуск определения координат местоположения системой счисления пути Δ,
- дрейфы гироскопов для «эталонного описания»  ,
,  ,
,  .
.
- погрешности смещения нуля акселерометров для «эталонного описания»  ,
,  ,
,  .
.
Третий блок вычислительных устройств (24) служит для расчета «эталонного описания» погрешностей системы счисления пути в выполняемом ВС полете, который проводится по следующим формулам:







где:
αi - ошибки ориентации сопровождающего трехгранника 1, 2, 3;
βi - ошибки ориентации опорного трехгранника;
γi - ошибки ориентации расчетного трехгранника;
δpi=δωi±ωi+1α3 - ошибки определения скоростных импульсов;
δωi - ошибки определения абсолютных угловых скоростей;
νi - приведенные ошибки дрейфа гироскопов;
ci - приведенные ошибки акселерометров.
Уравнения ошибок ИС решаются при заданных начальных условиях γ10, γ20, γ10, δр10, δр20, β30, α10, α20, δϕ0, δλ0, δV1(0), δV2(0), δV3(0), δε0 и признаке достоверности текущих параметров, выдаваемых ИС.
Дрейфы гироскопов и ошибки акселерометров задаются исходя из требований и точностных характеристик - Δ.
Переключатель (22) предназначен для подключения сигналов вектора Yвыбр на сумматор (6), а в случае отсутствия признака достоверности статистического контроля - подключение вектора Yинт после мажоритарно-допускового контроля.
Формирователь сигнала тревоги (9) служит для выдачи потребителю предупреждающего сигнала о нарушении заданного коридора.
Предложенное устройство обработки сигналов работает следующим образом.
Системы счисления пути (1), (2), (3) формируют параметры: ϕ (широта), λ (долгота), составляющие скорости VE (восточная), VN (северная) и признаки исправности составляющих вектора X: Испр. ϕсч, Испр. λсч, Испр.  , Испр.
, Испр.  . Для системы счисления пути (1) это параметры и признаки X1:
. Для системы счисления пути (1) это параметры и признаки X1:  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ; для системы (2) - параметры и признаки Х2:
; для системы (2) - параметры и признаки Х2:  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ; для системы (3) - параметры и признаки Х3:
; для системы (3) - параметры и признаки Х3:  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  . Каждая из информационных шин (25), (26), (27) передает параметры своей системы счисления пути и их признаки исправности в блок вычислительных устройств (5). В блоке (5) проводится параметральный контроль систем счисления пути. При положительном результате параметры осредняются. Если одна из систем выходит за допуск, она исключается из дальнейшей обработки. При расхождении всех трех систем выбирается первая достоверная по матрице состояния. Информационная шина (29) передает параметры
. Каждая из информационных шин (25), (26), (27) передает параметры своей системы счисления пути и их признаки исправности в блок вычислительных устройств (5). В блоке (5) проводится параметральный контроль систем счисления пути. При положительном результате параметры осредняются. Если одна из систем выходит за допуск, она исключается из дальнейшей обработки. При расхождении всех трех систем выбирается первая достоверная по матрице состояния. Информационная шина (29) передает параметры  (
( ,
,  ,
,  ,
,  ) и признаки исправности составляющих вектора
) и признаки исправности составляющих вектора  на переключатель (22). Корректор (4) формирует параметры: ϕк, λк,
на переключатель (22). Корректор (4) формирует параметры: ϕк, λк,  ,
,  координат (широты, долготы) и составляющих (северной и восточной) путевой скорости и их признаки исправности: Испр. Δϕк, Испр. Δλк, Испр.
координат (широты, долготы) и составляющих (северной и восточной) путевой скорости и их признаки исправности: Испр. Δϕк, Испр. Δλк, Испр.  , Испр.
, Испр.  . Информационная шина (28) передает параметры корректора (4) на сумматоры (6), (10), (11), (12). В каждом из сумматоров (10), (11), (12) вычисляются разности Δϕ, Δλ, ΔVE, ΔVN одноименных сигналов системы счисления пути, поступающих по соответствующему разветвлению шины (25), (26), (27), и корректора (4): Информационная шина (35) передает с сумматора (10) параметры Δϕ1, Δλ1,
. Информационная шина (28) передает параметры корректора (4) на сумматоры (6), (10), (11), (12). В каждом из сумматоров (10), (11), (12) вычисляются разности Δϕ, Δλ, ΔVE, ΔVN одноименных сигналов системы счисления пути, поступающих по соответствующему разветвлению шины (25), (26), (27), и корректора (4): Информационная шина (35) передает с сумматора (10) параметры Δϕ1, Δλ1,  ,
,  на вход фильтра (13), шина (36), соответственно, с сумматора (11) параметры Δϕ2, Δλ2,
на вход фильтра (13), шина (36), соответственно, с сумматора (11) параметры Δϕ2, Δλ2,  ,
,  на вход третьего фильтра (14), а шина (37) с сумматора (12) параметры Δϕ3, Δλ3,
на вход третьего фильтра (14), а шина (37) с сумматора (12) параметры Δϕ3, Δλ3,  ,
,  на вход фильтра (15). В фильтре (13) формируются оценки
на вход фильтра (15). В фильтре (13) формируются оценки  ,
,  ,
,  ,
,  , и признаки исправности ошибок координат и составляющих путевой скорости: Испр.
, и признаки исправности ошибок координат и составляющих путевой скорости: Испр.  , Испр.
, Испр.  , Испр.
, Испр.  , Испр.
, Испр.  ; в фильтре (14), соответственно:
; в фильтре (14), соответственно:  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ; в фильтре (15):
; в фильтре (15):  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  . Блок вычислительных устройств (24) формирует ошибки координат и составляющих путевой скорости ΔϕЭ.О., Испр. ΔϕЭ.О., ΔλЭ.О., Испр. ΔλЭ.О.,
. Блок вычислительных устройств (24) формирует ошибки координат и составляющих путевой скорости ΔϕЭ.О., Испр. ΔϕЭ.О., ΔλЭ.О., Испр. ΔλЭ.О.,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  эталонного описания». Информационные шины (38), (39), (40) передают соответствующие параметры из фильтров (13), (14), (15), а информационная шина (52) из блока вычислительных устройств (24) в блок вычислительных устройств (16), в котором производится запоминание оценок ошибок координат трех систем счисления пути и ошибок координат, определение статистических характеристик сигналов выборки (математических ожиданий и дисперсий), определение функции потерь для каждой системы счисления пути, а также определение рейтинга каждой из контролируемых систем счисления пути. Информационная шина (50) передает в блок (17) из блока (23) заданный уровень погрешности счисления пути. Информационная шина (51) передает на блок (19) оценки погрешностей координат систем счисления пути и определяет их статистические характеристики. Выходными сигналами блока вычислительных устройств (16) являются рейтинги параметров
эталонного описания». Информационные шины (38), (39), (40) передают соответствующие параметры из фильтров (13), (14), (15), а информационная шина (52) из блока вычислительных устройств (24) в блок вычислительных устройств (16), в котором производится запоминание оценок ошибок координат трех систем счисления пути и ошибок координат, определение статистических характеристик сигналов выборки (математических ожиданий и дисперсий), определение функции потерь для каждой системы счисления пути, а также определение рейтинга каждой из контролируемых систем счисления пути. Информационная шина (50) передает в блок (17) из блока (23) заданный уровень погрешности счисления пути. Информационная шина (51) передает на блок (19) оценки погрешностей координат систем счисления пути и определяет их статистические характеристики. Выходными сигналами блока вычислительных устройств (16) являются рейтинги параметров  ,
,  , для каждой системы счисления пути ratij, (i - номер системы счисления, j - номер параметра), которые информационная шина (44) передает в селекторное устройство (21), формирующее составляющие вектора выходных параметров выбранной системы счисления пути Yвыбр (Δϕвыбр - широта, Δλвыбр - долгота, составляющие скорости
, для каждой системы счисления пути ratij, (i - номер системы счисления, j - номер параметра), которые информационная шина (44) передает в селекторное устройство (21), формирующее составляющие вектора выходных параметров выбранной системы счисления пути Yвыбр (Δϕвыбр - широта, Δλвыбр - долгота, составляющие скорости  ,
,  ) и признаки исправности составляющих вектора Yвыбр, поступающие на переключатель (22). Переключатель (22) подключает информационную шину (45), передающую поступающие из селекторного устройства (21) составляющие вектора Yвыбр, к сумматору (6) при достоверностях всех составляющих вектора Yвыбр, либо, в случае отсутствия признака достоверности подключает информационную шину (29), передающую из блока вычислительных устройств (5) параметры вектора Yинт (
) и признаки исправности составляющих вектора Yвыбр, поступающие на переключатель (22). Переключатель (22) подключает информационную шину (45), передающую поступающие из селекторного устройства (21) составляющие вектора Yвыбр, к сумматору (6) при достоверностях всех составляющих вектора Yвыбр, либо, в случае отсутствия признака достоверности подключает информационную шину (29), передающую из блока вычислительных устройств (5) параметры вектора Yинт ( (
( - широта,
- широта,  - долгота, составляющие скорости
- долгота, составляющие скорости  ,
,  ) и признаки исправности составляющих вектора
) и признаки исправности составляющих вектора  , после чего передает соответствующий сигнал через информационную шину (53) на сумматор (6). Информационная шина (30) передает с сумматора (6) информацию о составляющих вектора Yвыбр, либо о составляющих вектора
, после чего передает соответствующий сигнал через информационную шину (53) на сумматор (6). Информационная шина (30) передает с сумматора (6) информацию о составляющих вектора Yвыбр, либо о составляющих вектора  в фильтр (7), который формирует оценки ошибок координат и составляющих путевой скорости: Δϕ, Испр. Δϕ,
в фильтр (7), который формирует оценки ошибок координат и составляющих путевой скорости: Δϕ, Испр. Δϕ,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  ,
,  , Испр.
, Испр.  и признаки исправности составляющих вектора Yвыбр. Информационная шина (53) передает с переключателя (22) в задатчик (23) показатели первичного датчика Yвыбр либо
и признаки исправности составляющих вектора Yвыбр. Информационная шина (53) передает с переключателя (22) в задатчик (23) показатели первичного датчика Yвыбр либо  . Информационная шина (31) передает из фильтра (7) информацию об оценках ошибок координат и составляющих путевой скорости на сумматор (8), который формирует откорректированные показатели первичного датчика
. Информационная шина (31) передает из фильтра (7) информацию об оценках ошибок координат и составляющих путевой скорости на сумматор (8), который формирует откорректированные показатели первичного датчика  либо
либо  и по шине (32) передает соответствующий сигнал в формирователь сигнала тревоги (9), который по шине (33) выдает потребителю предупреждающий сигнал о нарушении заданного коридора.
и по шине (32) передает соответствующий сигнал в формирователь сигнала тревоги (9), который по шине (33) выдает потребителю предупреждающий сигнал о нарушении заданного коридора.
Таким образом, использование предлагаемого устройства позволит обеспечить повышение глубины контроля систем счисления пути за счет:
- контроля каждой из трех систем счисления пути с помощью их «эталонного описания» погрешностей (введения «аналитической» избыточности) [2];
- ранжирования и определение рейтинга ИС с использованием функции потерь и близости;
- диагностики отказавшей системы счисления пути и исключения ее из дальнейшего использования;
- формирования интегрального выходного сигнала качественно лучшей системы счисления пути с учетом критерия минимума погрешности измерителя.
Возможность достижения заявленного технического результата в предложенном устройстве подтверждена статистико-математически, а именно, посредством использования математического аппарата статистических решений [3] при построении формирователя статистического контроля систем счисления пути, сформированного введенными в известное устройство функциональными элементами, а также новыми коммутационными связями. С помощью позиционных поканальных фильтров определялись погрешности каждой из систем счисления пути. Формирователь «эталонного описания» [4] выдавал «эталонное описание» погрешностей системы счисления пути. На выбранном текущем интервале обработки определялись фактические математические ожидания и среднеквадратические отклонения погрешностей навигационных параметров, функция потерь и функция близости, рейтинг, учитывающий уровень погрешности для каждой системы счисления пути и границу, определяющую работоспособность устройства обработки сигналов. На основе функции потерь, функции близости и рейтинга сформирован выходной сигнал выбранной системы счисления пути и признак его достоверности.
Работоспособность предлагаемого устройства также подтверждена результатами экспериментальных испытаний с использованием моделей датчика и корректора на динамическом имитаторе навигационной обстановки. Результаты испытаний подтвердили получение положительного эффекта. В настоящее время ведутся работы по внедрению данного устройства в состав бортового программного обеспечения вычислительных систем самолетовождения для самолетов А-100, Ту-95 МСМ и базовой навигационной системы для самолетов ДА и ВТА.
Источники информации
1. Авиационные приборы и навигационные системы. Под ред. О.А. Бабича, М.: изд. ВВИА им. Н.Е. Жуковского, 1981 г., стр. 587-591.
2. С.П. Дмитриев, Н.В. Колесов, А.В. Осипов. Информационная надежность, контроль и диагностика навигационных систем. СПб: ГНЦ РФ ЦНИИ «Электроприбор», 2004 г., стр. 5-7, 37-38.
3. Г. Крамер. Математическая статистика. М.: Мир, 1976 г.
4. Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий. Под ред. М.Н. Красильщикова и Г.Г. Себрякова, М.: ФИЗМАТЛИТ, 2005 г., стр. 177-178.
Устройство обработки сигналов, содержащее первую, вторую и третью системы счисления пути, корректор, первый блок вычислительных устройств, первый и второй сумматоры, первый фильтр, а также формирователь сигнала тревоги, при этом каждая система счисления пути подключена выходом к соответствующему входу первого блока вычислительных устройств, который выходом связан с первым входом первого сумматора, вторым входом подключенного к выходу корректора, а также с первым входом второго сумматора, причем первый сумматор выходом, а второй сумматор вторым входом подключены к первому фильтру, отличающееся тем, что дополнительно введены третий, четвертый и пятый сумматоры, второй, третий и четвертый фильтры, задатчик, входом соединенный с выходом первого фильтра, второй и третий блоки вычислительных устройств, селекторное устройство, формирователь сигнала тревоги, входом соединенный с выходом второго сумматора и выходом которого является признак нарушения границы заданного коридора, а также переключатель, первым входом соединенный с выходом блока вычислительных устройств, а выходом с первым входом первого сумматора и входом задатчика, при этом третий, четвертый и пятый сумматоры первыми входами подключены соответственно к выходам первой, второй и третьей систем счисления пути, вторыми входами к выходу корректора, а выходами к первым входам второго, третьего и четвертого фильтров соответственно, при этом упомянутые фильтры своими вторыми входами подключены соответственно к первому, второму и третьему выходам задатчика, четвертым выходом подключенного ко входу третьего блока вычислительных устройств, второй блок вычислительных устройств включает последовательно соединенные блок определения границы работоспособности i-й системы счисления пути, подключенный первым входом к пятому выходу задатчика, вторым входом к выходу третьего блока вычислительных устройств, третьим, четвертым и пятым входами к выходам соответственно второго, третьего и четвертого фильтров, блок определения функции потерь, блок определения функции близости, подключенный вторым входом к шестому выходу задатчика, блок определения рейтинга i-й системы счисления пути, связанный выходом через селекторное устройство со вторым входом переключателя.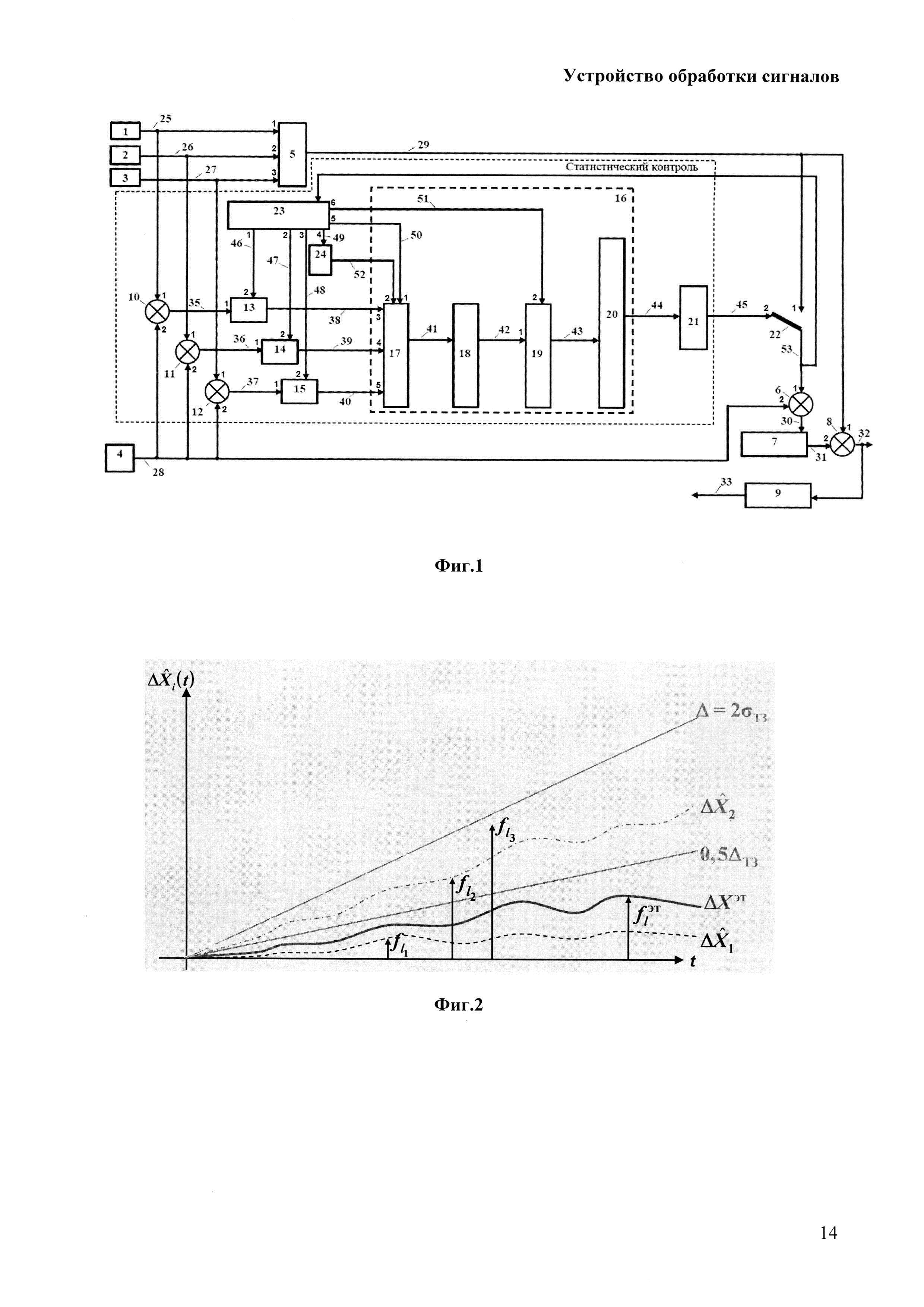
Способ формирования выходной информации в блоке гироскопов и трехосный блок демпфирующих гироскопов
Способ компенсации систематических составляющих дрейфа гироскопических датчиков
Способ сборки кольцевого резонатора лазерного гироскопа (варианты)
Трехосный микромеханический блок чувствительных элементов
Система астроинерциальной навигации
Навигационно-пилотажный комплекс
Способ комплексирования бесплатформенных инерциальных навигационных систем
Способ компенсации дрейфа нулевых сигналов гироскопических датчиков
Способ построения астроинерциальной навигационной системы
Способ астрокоррекции
Способ автоматического управления самолетом на посадке и система для его реализации
Способ управления самолетом при посадке
Способ формирования выходной информации в блоке гироскопов и трехосный блок демпфирующих гироскопов
Устройство обработки сигналов
Способ измерения угловой скорости одноосным микромеханическим гироскопом и устройство для его реализации
Трехосный микромеханический измеритель параметров движения
Способ астроинерциальной навигации и устройство для его реализации
Способ управления скоростью полёта самолёта с учетом стабилизации скорости

