Результат интеллектуальной деятельности: СПОСОБ КОМПЛЕКСИРОВАНИЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ
Вид РИД
Изобретение
Изобретение относится к навигационно-пилотажным комплексам, объединяющим несколько инерциальных навигационных систем для формирования обобщенной выходной информации о местонахождении объекта, его ориентации в пространстве и его скоростях, а также использующим внешнюю информацию для коррекции систем, входящих в состав комплекса.
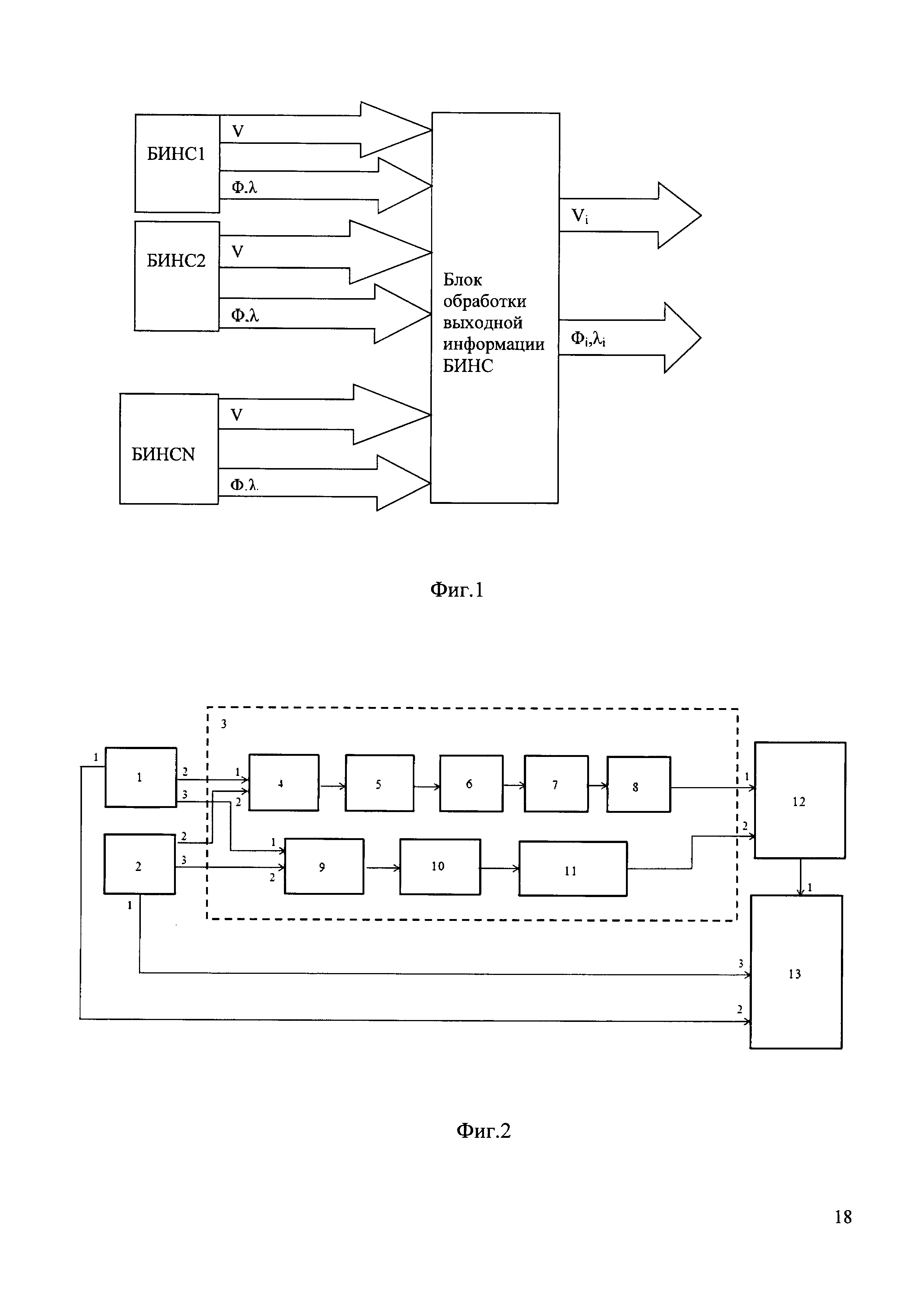
Известный способ комплексирования инерциальных навигационных систем осуществляется посредством выбора выходной информации инерциальных навигационных систем (ИНС) по мажоритарному признаку, т.е. наиболее достоверной информацией, поступающей в комплекс от различных систем, считается та информация, которая имеет наименьшее расхождение, в частности, выбирается та система, для коррекции которой используется внешняя информация, обеспечивающая повышение точности выходных параметров системы. Другие системы, входящие в состав навигационного комплекса, выполняют функции не более как резервного канала, обеспечивающие повышение надежности всего комплекса. Примером комплекса, реализующего известный способ, является навигационно-пилотажный комплекс ВП-021 (см. Фиг. 1).
Технической задачей предлагаемого способа комплексирования инерциальных навигационных систем является повышение точности выходной информации навигационно-пилотажного комплекса и глубины контроля систем, входящих в состав комплекса.
Указанная техническая задача решается благодаря способу комплексирования бесплатформенных инерциальных навигационных систем, заключающемуся в том, что выходная информация, поступающая по меньшей мере с двух бесплатформенных инерциальных систем, сравнивается по мажоритарному признаку, после чего отбраковывается информация той бесплатформенной инерциальной системы, которая наиболее отклоняется от остальных, при этом согласно изобретению первичная информация в виде матриц ориентации и приращений линейных скоростей поступает с выходов бесплатформенных инерциальных систем на вход блока обработки первичной информации, в котором по заданному критерию формируется осредненное значение матрицы ориентации и приращения линейных скоростей, эти осредненные значения поступают на вход блока решения навигационных уравнений, а полученные в результате решения навигационных уравнений выходные параметры в виде текущих координат и курса объекта и его скоростей поступают на вход блока контроля, в котором производится сравнение выходных параметров бесплатформенных инерциальных систем с выходными параметрами блока решения навигационных уравнений и анализ отказных ситуаций узлов бесплатформенных инерциальных систем.
Специфика решения задачи навигации с использованием БИНС заключается в отсутствии сигналов управления датчиками моментов (ДМ) системы. Поэтому для повышения точности выходной информации комплекса и повышения глубины контроля систем, входящих в состав комплекса, комплексирование нескольких БИНС предлагается выполнять путем предварительной обработки первичной информации, поступающей с систем - матрица ориентации и ускорения в осях акселерометров блока чувствительных элементов (БЧЭ) - с последующим решением навигационных уравнений на основе обработанной первичной информации, получаемой от систем, входящих в состав комплекса, с последующим контролем поступающей от систем в комплекс информации, что повышает глубину контроля систем, входящих в состав комплекса (см. Фиг. 2). Рассмотрим задачу комплексной обработки первичной информации, поступающей с нескольких БИНС (поз. 1, 2) в виде матрицы ориентации и ускорений (или приращений линейных скоростей), поступающих с выходов первых интеграторов систем. Взаимная ориентация блока чувствительных элементов (БЧЭ) БИНС при решении задачи может быть произвольной и определяться в режиме начальной выставки систем как

где
Ai0, Aj0 - начальное значение матриц ориентации Ai, Aj;
N - общее число БИНС, входящих в комплекс.
Здесь и далее по тексту векторы и матрицы обозначаются жирным шрифтом, операции транспонирования обозначаются надстрочным индексом “т”, операции обращения матриц обозначаются надстрочным индексом “-1”.
При решении задачи в самом общем случае в качестве исходной информации используется N матриц ориентации Ai, i=1, 2,…, N или эквивалентных им углов курса, крена и тангажа.
Определим матрицу ориентации  , связанную с Ai соотношениями
, связанную с Ai соотношениями

где
δ^i - кососимметрическая матрица, соответствующая вектору
 малых углов поворота;
малых углов поворота;
Е - единичная матрица.
Взаимная ориентация матриц Ai, Aj определяется как

откуда с учетом
А-1=Ат - для ортогональных матриц,
(δ^)т=-δ^ - для кососимметрических матриц.
Умножая (3) на Аjт справа, получаем

Обозначим

Тогда

i, j=1, 2,…, N
i≠j
(6) не дает однозначного решения. Для подтверждения этого утверждения рассмотрим частный случай N=3.
Имеем

Умножив (9) на Cij справа и сложив с (8), получаем

Подставляя (9) в (10), получаем

В (11) имеем неопределенность вида 0/0, т.е. система (11) не имеет единственного решения. В общем случае при N>3 любая тройка из N выбранных уравнений будет линейно зависимой, т.е. ранг этой системы не будет максимальным.
Геометрическая интерпретация полученного результата совершенно прозрачна. Полученная по (11) точка является точкой пересечения трехмерных сферических поверхностей радиуса δi в 3 N-мерном пространстве, где δi - длина вектора δi, с центрами, определяемыми матрицами Ai. Такая точка может быть определена произвольным заданием вектора δj; все остальные векторы δi, i=1, 2,…, N, i≠j определяются решением уравнений (11).
Для получения однозначного решения введем критерий Гаусса

Приравнивая к нулю первые частные производные J по δi, получаем

Суммируя (11) по i=1, 2,…, N, i≠j, получаем

или с учетом (13)

Приравнивая верхние недиагональные элементы в (15), получаем уравнения в скалярном виде

где
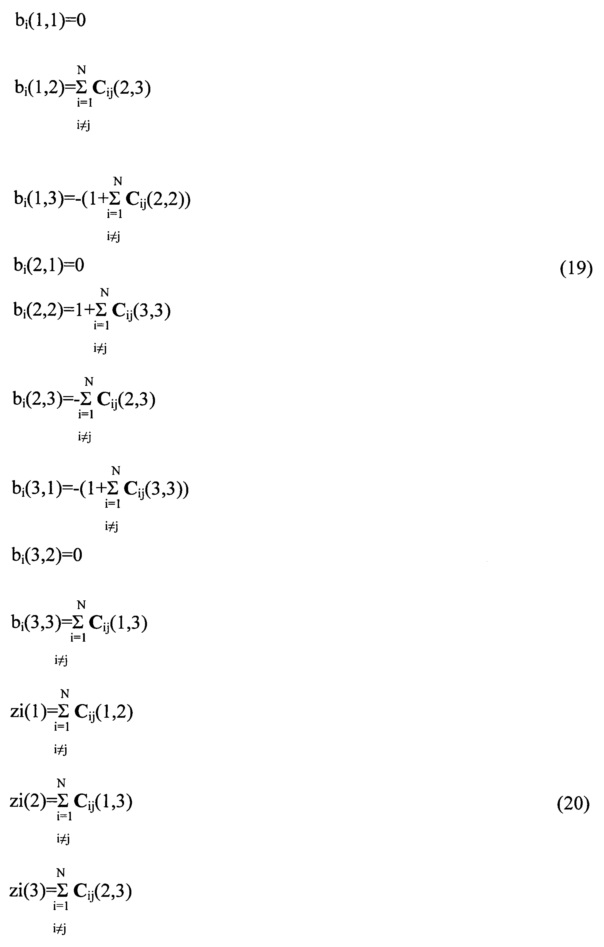
(в скобках стоят номера элементов матриц Cij, Bi и векторов δi, zi), или в векторной форме

где элементы матрицы В и вектора z определяются по (19) и (20).
Искомый вектор δi определяется как

Искомая матрица  определяется как
определяется как

где Aj - матрица ориентации j-го БИНС.
Следует отметить, что матрицы , определяемые как  и
и  (равно как и матрицы δ^i, δ^j), не являются тождественными и отличаются в общем случае начальной матрицей Aij0 взаимной ориентации, что может оказаться важным в ряде приложений.
(равно как и матрицы δ^i, δ^j), не являются тождественными и отличаются в общем случае начальной матрицей Aij0 взаимной ориентации, что может оказаться важным в ряде приложений.
Отметим специфику применения критерия (12) при построении алгоритма. Стандартно критерий Гаусса применяется для получения решения переопределенной системы (метод наименьших квадратов).
В рассматриваемом алгоритме критерий (12) введен для получения однозначного решения системы 3N уравнений с 3N неизвестными. Вообще говоря, можно получить переопределенную систему, написав N уравнений (11) с i=1, 2,…, N. Однако такой подход не даст желаемого результата ввиду полной тождественности написанных уравнений. Действительно, рассмотрим систему

Подставляя (26) в (25)

и умножая справа на Cki, получаем с учетом CkiCkj=Cij

тождественное (24).
Задача определения решалась выше с использованием критерия Гаусса (12). Задача может решаться с использованием критерия Чебышева

В рассматриваемом случае решение задачи с критерием (29) сводится к решению системы 3N уравнений с 2N неизвестными, а критерий (29) сводится к

или эквивалентному ему

Геометрически решение как точка в 3N-мерном пространстве равноудаленная от трехмерных гиперплоскостей (22). Такой точкой является центр гиперсферы, вписанной в замкнутый симплекс-многогранник, образованный системой 3-мерных гиперплоскостей (22) в 3 N-мерном пространстве, а условие (31) трансформируется в условие

для всех i, j=1, 2,…, N, эквивалентное (29).
Умножая (32) на δiтBij-1 слева, получаем параметрическую систему алгебраических уравнений

решая которую, получим результат δi, эквивалентный результату, полученному ранее.
Для учета степени значимости (приоритета) тех или иных измерений в квадратичную форму Гаусса вводится матрица весовых коэффициентов. В рассматриваемой задаче квадратичная форма и ее производные будут иметь вид:

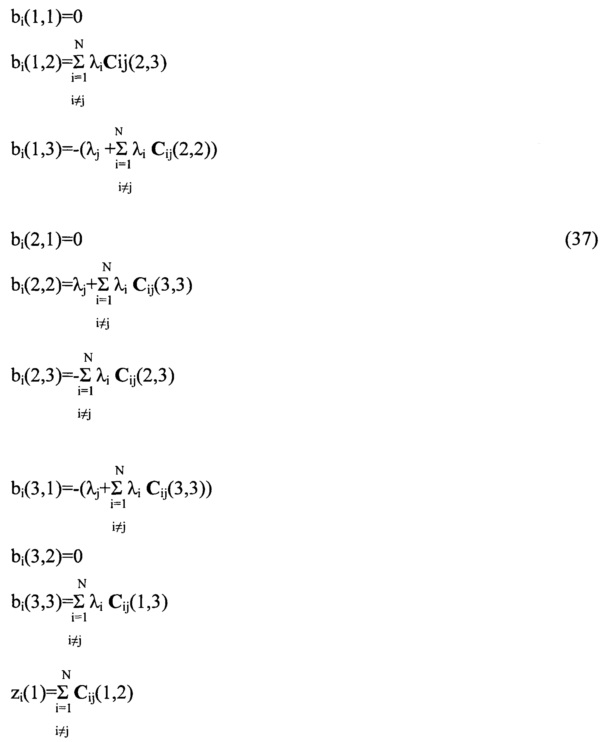
Умножая (15) на λi,j, i=1, 2,…, N, i≠j, получаем с учетом (35)

Приравнивая верхние недиагональные элементы в (36), получаем уравнения в скалярном виде (16), (17), (18), где

Выше построен алгоритм однозначного определения векторов δi и матрицы как результат однократной обработки исходных матриц ориентации Ai, i=1, 2,…, N, полученных на текущий момент времени. Для фильтрации случайных ошибок измерения результаты измерений осредняются на заданном временном интервале измерения построением линейного фильтра

Для построения фильтра (39) необходимо построить переходную матрицу F, описывающую динамику изменения оцениваемых переменных х, определить вектор измерения z, построить матрицу связи Н и сформировать коэффициент усиления К в цепи обратной связи фильтра.
Поведение матриц ориентации Ai комплексируемых БИНС описывается линейными уравнениями Пуассона

где ωi^ - кососимметрическая матрица, соответствующая вектору ωi абсолютных угловых скоростей приборного трехгранника i-го БИНС.
В силу линейности (40) и принципа суперпозиции поведение вектора δi может быть описано кинематическими уравнениями ошибок

где vi - скорости расхождения матриц и Ai в осях приборного трехгранника i-го БИНС, вызванные наличием некомпенсированных инструментальных ошибок (дрейфов) системы.
Поскольку скорости vi определены в осях приборного трехгранника, можно считать, что эти переменные не зависят от абсолютных скоростей ωi.

Обозначим

Тогда структура матрицы F в (39) будет определяться уравнениями (41), (42)

где
Е - единичная матрица размера 3×3,
dt - шаг интегрирования.
В качестве измерения используется вектор малых углов δi. Тогда матрица связи будет определяться, как

где Е - единичная матрица размера 3×3.
Коэффициент усиления К может вычисляться по стандартному алгоритму Калмана.
На блок-схеме (см. фиг. 2) приведена структурная схема функциональных компонентов блока обработки первичной информации (поз. 3), реализующая вычисление матрицы ориентации  , которая состоит из последовательно соединенных блока вычисления переменных bi (k, r) (поз. 4), где k, r - номера строк и столбцов матриц ориентации A(k, r) комплексируемых систем, блока вычисления измерений z(i) (поз. 5), блока вычисления невязок δi (поз. 6), блока фильтрации невязок δi (поз. 7) и блока вычисления матрицы ориентации
, которая состоит из последовательно соединенных блока вычисления переменных bi (k, r) (поз. 4), где k, r - номера строк и столбцов матриц ориентации A(k, r) комплексируемых систем, блока вычисления измерений z(i) (поз. 5), блока вычисления невязок δi (поз. 6), блока фильтрации невязок δi (поз. 7) и блока вычисления матрицы ориентации  (поз. 8).
(поз. 8).
Задача обработки скоростной информации решается на уровне ускорений Wi (приращений скоростей за такт работы вычислителя), определенных в проекциях на оси приборного трехгранника (БЧЭ). Сформируем вектор измерений как

Получаем переопределенную систему, которую будем решать с использованием критерия Гаусса

где λi - весовой коэффициент.
Приравнивая нулю частные производные по  , получаем искомое решение ( в проекциях на оси сопровождающего трехгранника)
, получаем искомое решение ( в проекциях на оси сопровождающего трехгранника)

Полученный вектор используется в дальнейшем для решения навигационных уравнений.
Для использования позиционной информации по текущим координатам и курсу ϕi, λi, εi определим матрицу направляющих косинусов i-го БИНС
где индексы, стоящие в круглых скобках, определяют элементы матрицы Bi. Выполняя операции над матрицами направляющих косинусов Bi, аналогичные операциям, выполняемым над матрицами ориентации Ai

где элементы матрицы Bij и вектора z определяются по (19) и (20), как

(принимается во внимание, что сопровождающие трехгранники всех N БИНС имеют одинаковую ориентацию по северному направлению местного меридиана).
Искомый вектор γi определяется как

Искомая матрица направляющих косинусов  определяется как
определяется как

Элементы γi(1), γi(2) вычисленного по (55) вектора γi будем использовать в качестве измерений при построении фильтра. Моделью оцениваемых ошибок является динамическая группа уравнений ошибок:
где
δр1, δр2 - скоростные импульсы,
α1, α2 - ошибки построения вертикали,
ε1, ε2 - приведенные ошибки масштабов акселерометров,
v1, v2 - скорости уходов, определяемые величиной некомпенсированных дрейфов БИНС,
ω02 - частота Шулера.
При интегрировании этих уравнений в правую часть будем подставлять значения углов δi и уходов vi, полученных по алгоритму, описанному выше, и перепроектированных на оси сопровождающего трехгранника

В результате получаем автономную систему уравнений ошибок оценки

где Δγi, Δδpi, Δαi i=1, 2 - ошибки оценки  переменных γi, δpi, αi, получаемой на выходе фильтра.
переменных γi, δpi, αi, получаемой на выходе фильтра.

При определении коэффициентов усиления в цепи обратной связи фильтра пренебрежем слабыми перекрестными связями между каналами системы, что не приведет к нарушению устойчивости системы, а лишь к сдвигу корней ее характеристического уравнения. В результате получаем две тождественные системы уравнений третьего порядка

или в векторной форме

где


с измерением

и матрицей связи

Выходными параметрами алгоритма являются вектор δi, по которому вычисляется откорректированное значение матрицы ориентации  , и векторы х (64). Компоненты γi векторов х, i=1, 2 используются для коррекции матрицы направляющих косинусов:
, и векторы х (64). Компоненты γi векторов х, i=1, 2 используются для коррекции матрицы направляющих косинусов:

где

Компоненты δpi используются для вычисления откорректированных скоростей.
Структурная схема функциональных компонентов блока обработки поступающей с выхода БИНС первичной информации, реализующая вычисление матрицы приращения линейных скоростей Wi, представлена на Фиг. 2 в виде трех последовательно соединенных блоков (Фиг. 2) - блока вычисления по (47)-(55) переменных γi (поз. 9), блока фильтрации γi (поз. 10) и блока вычисления по (56) матрицы В направляющих косинусов (поз. 11). На выходе блока (поз. 3) получаем откорректированные значения линейных скоростей объекта V1, V2 и матрицы направляющих косинусов.
В блоке решения навигационных уравнений (поз. 12) решаются стандартные навигационные уравнения и интегрируется матрица ориентации А решением стандартных уравнений Пуассона. Входными величинами для интегрирования навигационных уравнений и матрицы ориентации в этом блоке являются матрицы  в осях приборного трехгранника и скорости V1, V2, полученные в блоке обработки первичной информации.
в осях приборного трехгранника и скорости V1, V2, полученные в блоке обработки первичной информации.
Блок решения навигационных уравнений (поз. 12) выходом подключается к входу блока контроля (поз. 13), другие входы которого подключаются к выходам БИНС (поз. 1, 2), входящих в состав комплекса.
Построим индикатор контроля скоростной информации. Определим разность приращения скоростей, поступающих с выходов интеграторов i-го и j-го БИНС в проекциях на оси j-го БИНС

В качестве индикатора введем скалярное произведение

Подставляя (70) в (71), получаем

Таким образом, заявленный способ позволяет проводить совместную обработку первичной информации (угловых скоростей и ускорений), поступающей с выходов N БИНС (N>1), а разработанный способ индикации сбоев исходной информации обеспечивает не только идентификацию БИНС, в котором произошел сбой (при N>2), но и источник сбоя (блок формирования и выдачи угловых скоростей, ускорений), и конкретный канал.
Способ комплексирования бесплатформенных инерциальных навигационных систем, заключающийся в том, что выходная информация, поступающая по меньшей мере с двух бесплатформенных инерциальных систем, сравнивается по мажоритарному признаку, после чего отбраковывается информация той бесплатформенной инерциальной системы, которая наиболее отклоняется от остальных, отличающийся тем, что первичная информация в виде матриц ориентации и приращений линейных скоростей поступает с выходов бесплатформенных инерциальных систем на вход блока обработки первичной информации, в котором по заданному критерию формируется осредненное значение матрицы ориентации и приращения линейных скоростей, эти осредненные значения поступают на вход блока решения навигационных уравнений, а полученные в результате решения навигационных уравнений выходные параметры в виде текущих координат и курса объекта и его скоростей поступают на вход блока контроля, в котором производится сравнение выходных параметров бесплатформенных инерциальных систем с выходными параметрами блока решения навигационных уравнений и анализ отказных ситуаций узлов бесплатформенных инерциальных систем.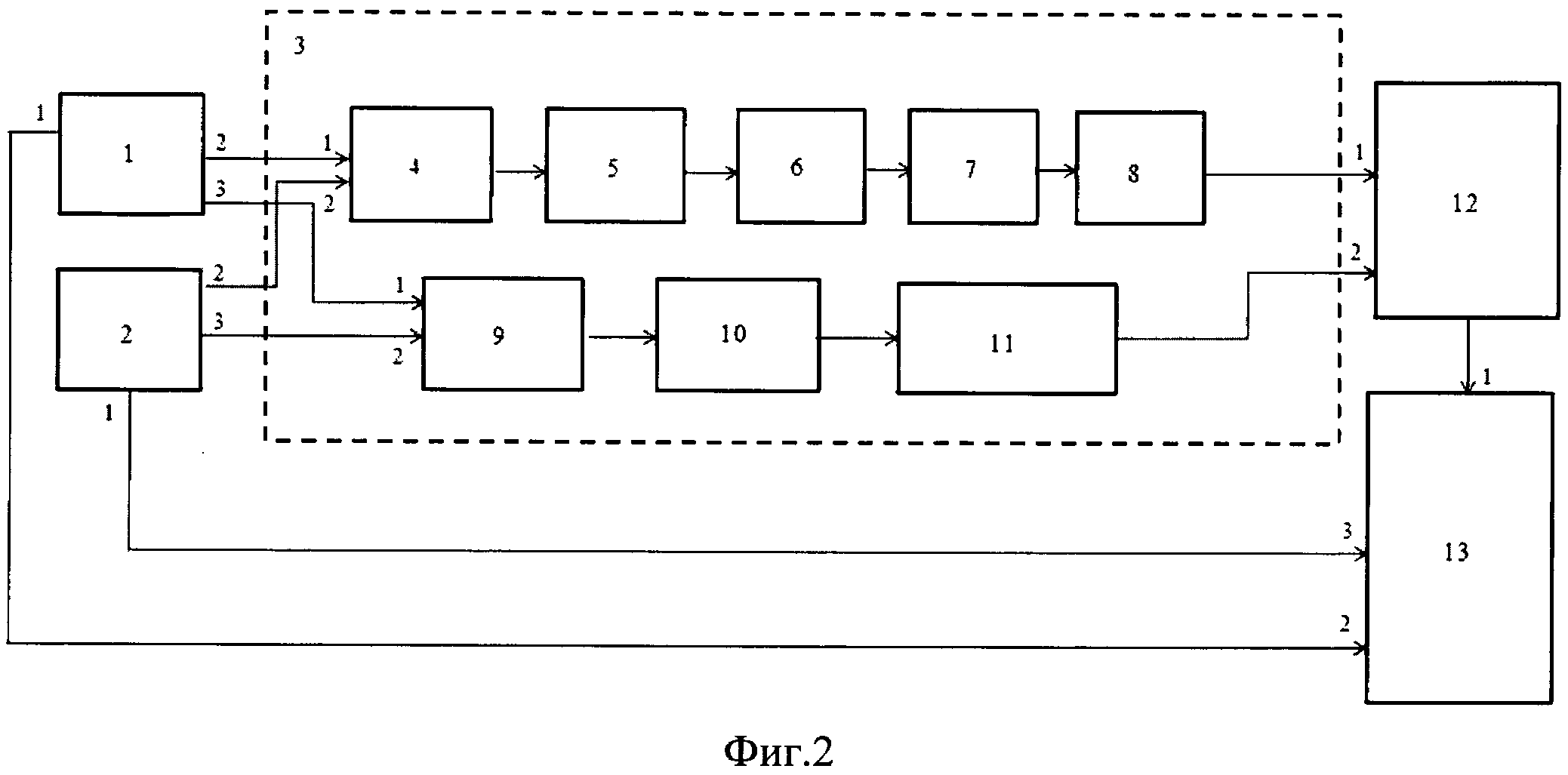
Система астровизирования
Способ первичной обработки выходной информации астровизирующего устройства
Система астровизирования
Способ астровизирования
Способ формирования выходной информации в блоке гироскопов и трехосный блок демпфирующих гироскопов
Способ компенсации систематических составляющих дрейфа гироскопических датчиков
Способ сборки кольцевого резонатора лазерного гироскопа (варианты)
Трехосный микромеханический блок чувствительных элементов
Система астроинерциальной навигации
Способ определения навигационных параметров и бесплатформенная инерциальная навигационная система для его осуществления
Система астровизирования
Способ первичной обработки выходной информации астровизирующего устройства
Система астровизирования
Способ астровизирования
Способ формирования выходной информации в блоке гироскопов и трехосный блок демпфирующих гироскопов
Способ компенсации систематических составляющих дрейфа гироскопических датчиков
Способ сборки кольцевого резонатора лазерного гироскопа (варианты)
Трехосный микромеханический блок чувствительных элементов
Система астроинерциальной навигации
Способ определения навигационных параметров и бесплатформенная инерциальная навигационная система для его осуществления

