Результат интеллектуальной деятельности: СПОСОБ КОМПЕНСАЦИИ ДРЕЙФА НУЛЕВЫХ СИГНАЛОВ ГИРОСКОПИЧЕСКИХ ДАТЧИКОВ
Вид РИД
Изобретение
Изобретение относится к области авиационного приборостроения и может быть использовано в одноосных и трехосных измерителях угловых скоростей и линейных ускорений, используемых в инерциальных навигационных системах и в пилотажных системах управления подвижными объектами в качестве датчиков первичной информации.
Одним из главных источников погрешности измерений гироскопов и акселерометров является дрейф нулевого сигнала, вызванный его нестабильностью в запуске и от пуска к пуску. Эта проблема особенно остро проявляется в микромеханических гироскопах и акселерометрах, на базе которых строятся малогабаритные авиационные приборы.
Существует несколько способов решения этой проблемы. Один из них - это использование фильтра Калмана в инерциальных навигационных системах [1]. Основным недостатком этого способа является необходимость дополнительных внешних источников информации для компенсации ошибок датчиков первичной информации.
Еще одним способом является компенсация дрейфа гироскопов по показаниям акселерометров в автономных гировертикалях с радиальной коррекцией [2, 3]. Недостаток такого способа заключается в том, что при этом не учитываются погрешности самого акселерометра.
Прототипом изобретения является способ компенсации систематических составляющих от пуска к пуску [4] путем выделения компенсирующего сигнала из измеряемого по результатам сравнения измеряемого сигнала с заданным уровнем, рассчитанным по калибровочным коэффициентам, и последующей корректировкой измеряемого сигнала с помощью выделенного компенсирующего сигнала.
Основным недостатком такого способа является остаточная недокомпенсация измеряемого сигнала как из-за несовершенства алгоритмической компенсации, так и из-за нестабильности нулевого сигнала - его дрейфа в процессе эксплуатации.
Заявленное изобретение решает задачу компенсация дрейфа нулевого сигнала в процессе эксплуатации прибора, при этом достигается такой технический результат как повышение точностных характеристик гироскопических датчиков первичной информации.
Заявленный технический результат достигается способом компенсации дрейфа нулевых сигналов гироскопических датчиков путем выделения компенсирующего сигнала из измеряемого по результатам сравнения измеряемого сигнала с заданным уровнем и последующей корректировкой измеряемого сигнала с помощью выделенного компенсирующего сигнала, при этом выделение компенсирующего сигнала осуществляется путем фильтрации измеряемого сигнала, накоплением отфильтрованного сигнала, его осреднения, сравнения с заданным уровнем сигнала, накоплением массива выделенного сигнала, его осреднения, прогнозирования, сравнения прогнозируемого сигнала с заданным уровнем и по результатам сравнения при превышении заданного уровня сигнала в качестве компенсирующего сигнала принимается спрогнозированный сигнал, а при не превышении заданного уровня сигнала спрогнозированный сигнал в качестве компенсирующего не принимается.
При накоплении компенсирующих сигналов равным или большим как минимум четырех значений производится осреднение значений компенсирующего сигнала по как минимум трем предыдущим значениям компенсирующего сигнала, вычитание осредненного компенсирующего сигнала из прогнозируемого, сравнение с заданным уровнем допустимого дрейфа и по результатам сравнения при превышении заданного уровня допустимого дрейфа в качестве компенсирующего сигнала принимается текущий прогнозирующий сигнал, а при не превышении заданного уровня допустимого дрейфа в качестве компенсирующего сигнала принимается предыдущий компенсирующий сигнал.
При накоплении выделенных нулевых сигналов меньше заданного количества производится прогнозирование компенсирующего сигнала по осредненным значениям выделенных нулевых сигналов как минимум четырех предыдущих измерений.
Сущность изобретения поясняется фиг. 1 и фиг. 2 чертежей.
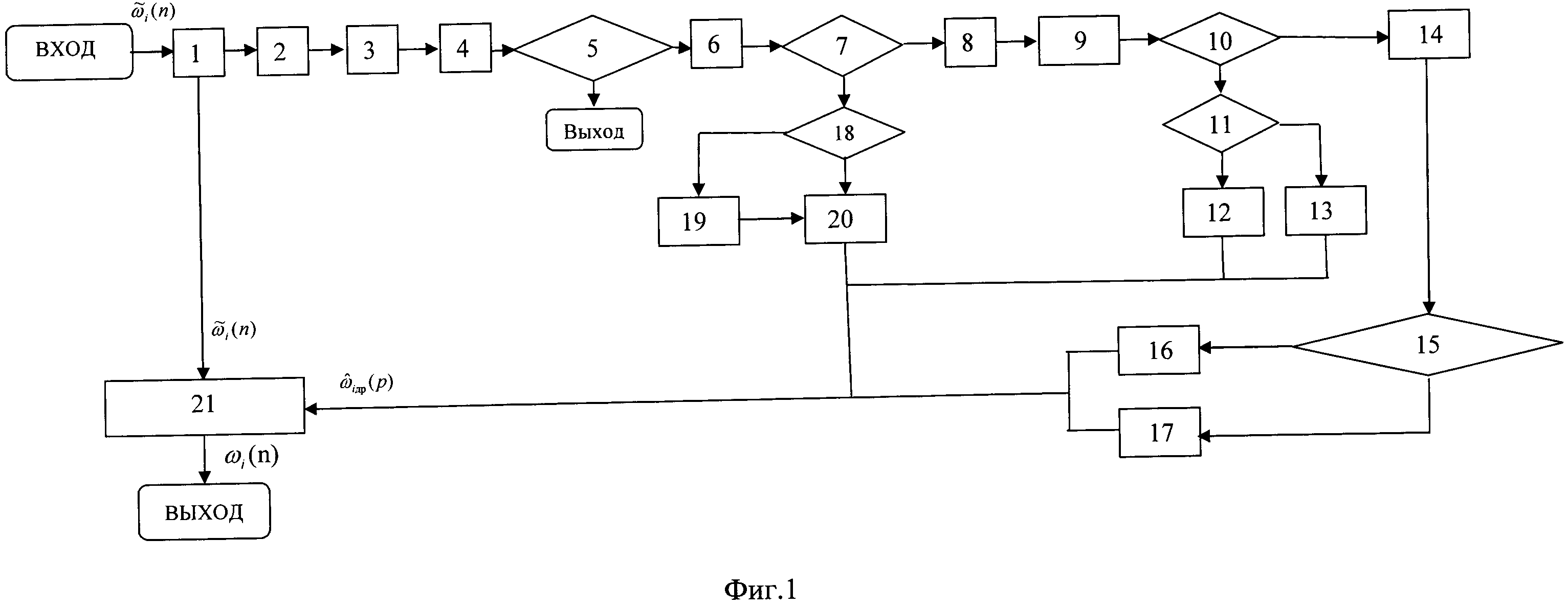
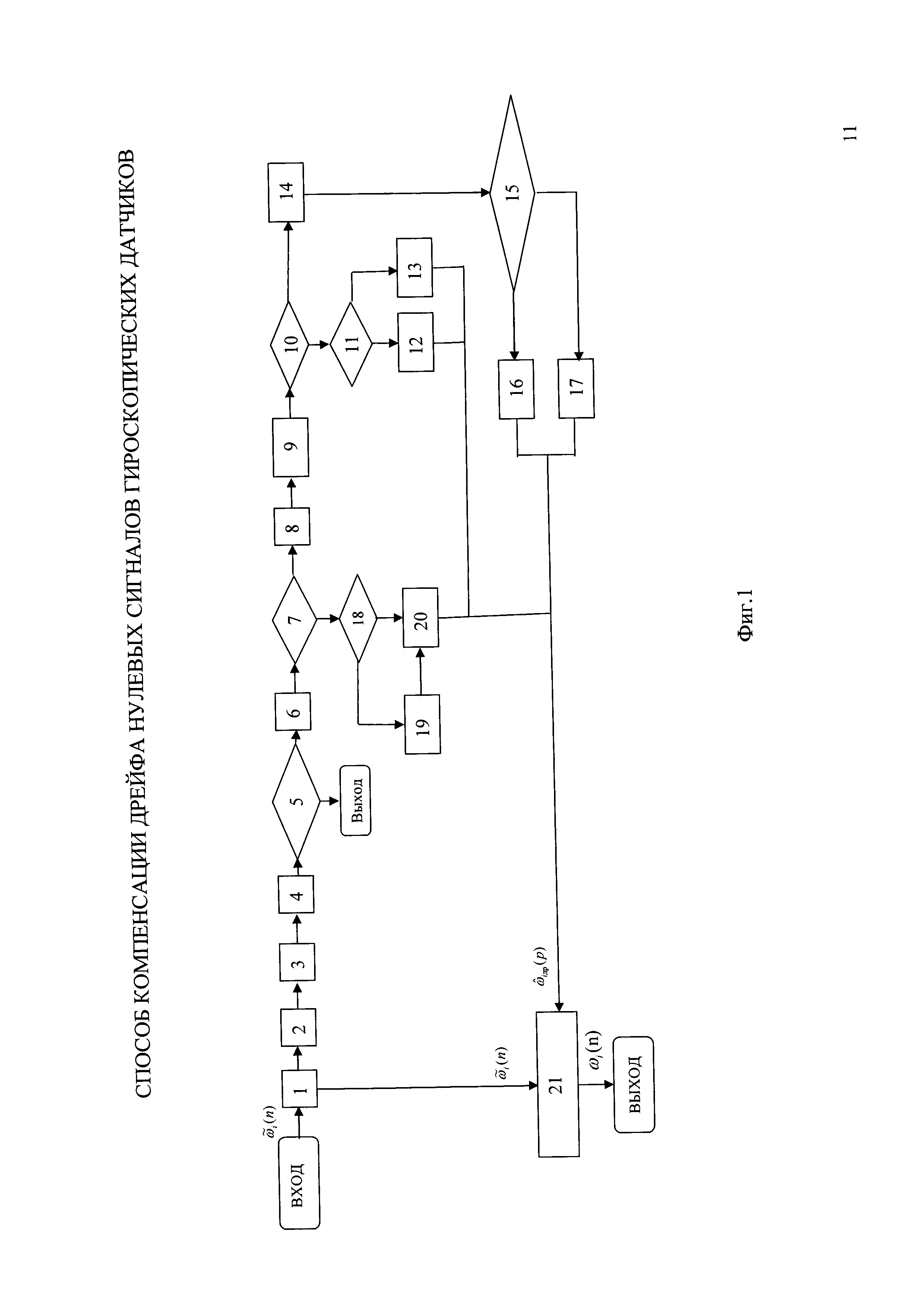
На фиг. 1 приведена структурная схема алгоритма определения и компенсации дрейфа нулевого сигнала гироскопа в процессе его эксплуатации,
где 1 - блок приема информации  с чувствительного элемента;
с чувствительного элемента;
2 - блок фильтрации информации;
3 - блок суммирования отфильтрованных сигналов  ;
;
4 - блок осреднения отфильтрованного сигнала по числу измерений N;
5 - блок выделения нулевого сигнала из осредненного значения измеренной угловой скорости ωicp(N) по условию ωiдр(N)=|ωicp(N)|≤ω0;
6 - блок суммирования выделенного нулевого сигнала  ;
;
7 - блок контроля числа N1 выделенных сигналов ωiдр(N) с числом измерений N0;
8 - блок осреднения выделенного нулевого сигнала по числу измерений N1 на интервале p измерений -  ;
;
9 - блок прогнозирования сигнала коррекции  ;
;
10 - блок контроля количества корректирующих сигналов на интервалах p с числом выбранных для корректировки значений нулевых сигналов N⋅N1;
11 - блок выборки прогнозируемых сигналов для осуществления коррекции измеряемого сигнала по условию  ;
;
12 - блок принятого для корректировки сигнала  при выполнении условия блока 11 -
при выполнении условия блока 11 -  ;
;
13 - блок принятого для корректировки сигнала при невыполнении условия блока 11 -  ;
;
14 - блок осреднения корректирующих сигналов  при выполнении условия блока 10;
при выполнении условия блока 10;
15 - блок сравнения разницы между спрогнозированным сигналом и усредненным корректирующим сигналом блока 14;
16 - блок выбора в качестве корректирующего сигнала прогнозируемого сигнала  при выполнении условия блока 15;
при выполнении условия блока 15;
17 - блок выбора в качестве корректирующего сигнала корректирующего сигнала предыдущего такта  при невыполнении условия блока 15;
при невыполнении условия блока 15;
18 - блок контроля набора заданного числа N1 на интервале p;
19 - блок выработки прогнозирующего сигнала  по осредненным значениям выделенных нулевых сигналов ωiдр(r)=ωiдд(p);
по осредненным значениям выделенных нулевых сигналов ωiдр(r)=ωiдд(p);
20 - блок выбора корректирующего сигнала по результатам спрогнозированного в блоке 19 значения дрейфа нулевого сигнала  при невыполнении условия блока 18;
при невыполнении условия блока 18;
21 - блок корректировки измеряемого сигнала  с помощью вычисленного значения дрейфа гироскопа
с помощью вычисленного значения дрейфа гироскопа  .
.
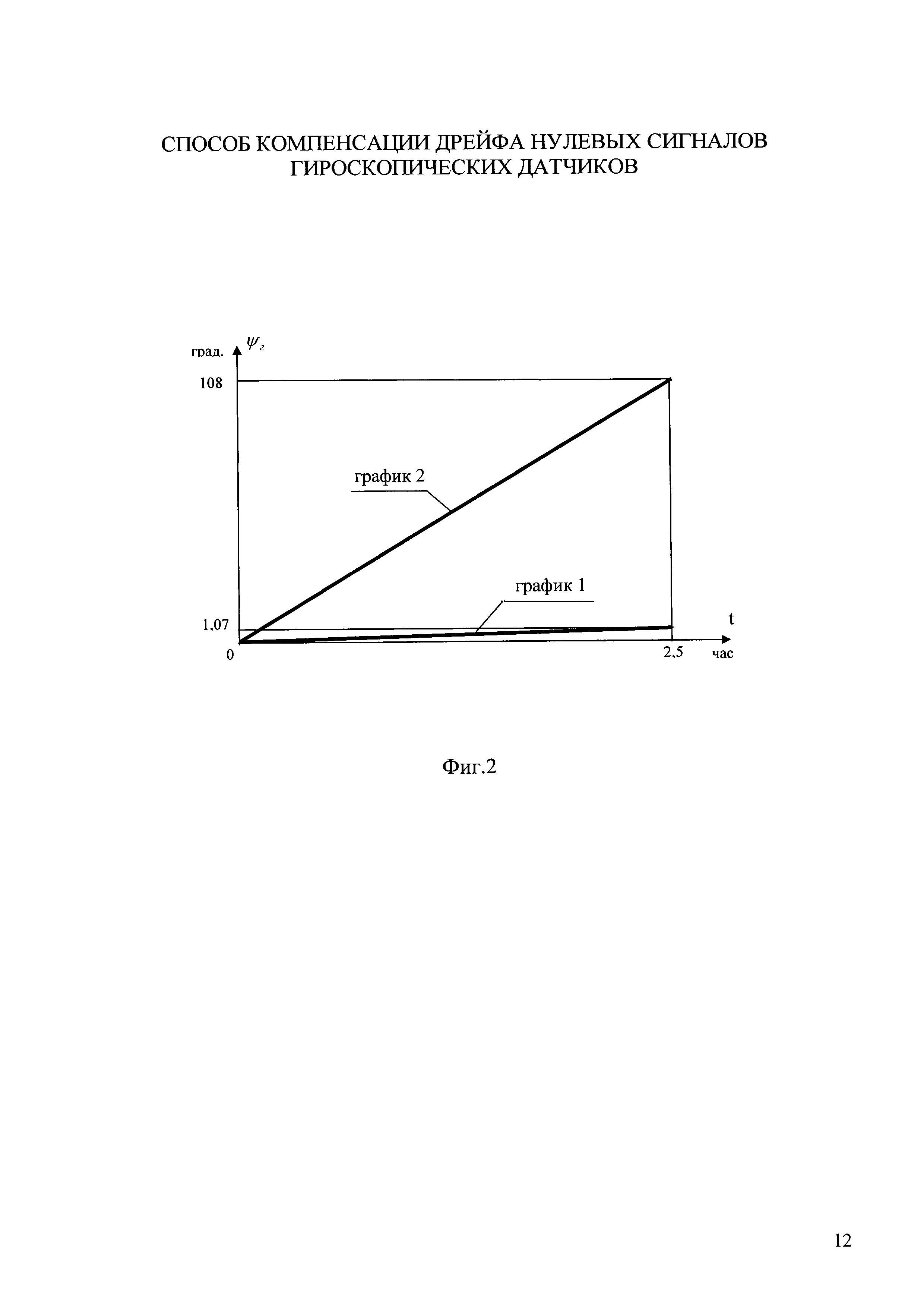
На фиг. 2 показаны графики накопления угловой погрешности гироскопического курсового угла ψг(t): 1 - при скомпенсированном дрейфе нулевого сигнала ωy(t); 2 - при нескомпенсированном дрейфе нулевого сигнала  .
.
Реализуется изобретение следующим образом. В блоке 1 (фиг. 1) осуществляется прием измеренного сигнала гироскопа  . В блоке 2 производится фильтрация принятого сигнала с целью устранения высокочастотных составляющих, например, с помощью следующего фильтра:
. В блоке 2 производится фильтрация принятого сигнала с целью устранения высокочастотных составляющих, например, с помощью следующего фильтра:  , где β=Tфƒ, Tф - постоянная времени фильтра, ƒ - частота входящей информации.
, где β=Tфƒ, Tф - постоянная времени фильтра, ƒ - частота входящей информации.
В блоке 3 производится накопление массива N отфильтрованного сигнала  . В блоке 4 накопленный массив осредняется
. В блоке 4 накопленный массив осредняется  . В блоке 5 производится выделение нулевого сигнала из осредненного значения измеренной угловой скорости ωicp(N) путем сравнения с заданным уровнем нулевого сигнала ω0. В качестве дрейфа нулевого сигнала используются значения измеренной угловой скорости, удовлетворяющие условию ωiдр(N)=|ωicp(N)|≤ω0. Если рассчитанное значение дрейфа меньше или равно допустимому, то это значение используется для дальнейшего накопления в блоке до заданной величины массива N1≥N0 (блок 7).
. В блоке 5 производится выделение нулевого сигнала из осредненного значения измеренной угловой скорости ωicp(N) путем сравнения с заданным уровнем нулевого сигнала ω0. В качестве дрейфа нулевого сигнала используются значения измеренной угловой скорости, удовлетворяющие условию ωiдр(N)=|ωicp(N)|≤ω0. Если рассчитанное значение дрейфа меньше или равно допустимому, то это значение используется для дальнейшего накопления в блоке до заданной величины массива N1≥N0 (блок 7).
При выполнении условия блока 7 в блоке 8 производится осреднение выделенного нулевого сигнала по числу измерений N1 на интервале p измерений -  .
.
Далее в блоке 9 производится линейное прогнозирование по результатам двух соседних измерений, например,  , где ωiдр(r)=ωiдд(p) - выделенный для прогнозирования нулевой сигнал.
, где ωiдр(r)=ωiдд(p) - выделенный для прогнозирования нулевой сигнал.
При накоплении компенсирующих сигналов  меньше чем как минимум четырех значений (блок 10) текущий прогнозирующий сигнал сравнивается в блоке 11 с заданным значением допустимого дрейфа
меньше чем как минимум четырех значений (блок 10) текущий прогнозирующий сигнал сравнивается в блоке 11 с заданным значением допустимого дрейфа  .
.
По результатам сравнения при превышении заданного в блоке 11 уровня сигнала в качестве компенсирующего сигнала принимается спрогнозированный сигнал  (блок 12) при невыполнении условия блока 11 спрогнозированный сигнал в качестве компенсирующего не принимается
(блок 12) при невыполнении условия блока 11 спрогнозированный сигнал в качестве компенсирующего не принимается  (блок 13).
(блок 13).
После накопления более четырех корректирующих значений нулевого сигнала  производится осреднение корректирующего сигнала по трем предыдущим значениям корректирующих сигналов (блок 14)
производится осреднение корректирующего сигнала по трем предыдущим значениям корректирующих сигналов (блок 14)  . В блоке 15 рассчитывается разница между прогнозируемым сигналом и осредненным в блоке 14 и сравнивается с допустимым дрейфом нулевого сигнала
. В блоке 15 рассчитывается разница между прогнозируемым сигналом и осредненным в блоке 14 и сравнивается с допустимым дрейфом нулевого сигнала  . Если эта разница меньше допустимой Δω0др, то в качестве компенсирующего сигнала принимается текущий прогнозирующий сигнал
. Если эта разница меньше допустимой Δω0др, то в качестве компенсирующего сигнала принимается текущий прогнозирующий сигнал  (блок 16), а при непревышении заданного уровня допустимого дрейфа в качестве корректирующего сигнала принимается предыдущий корректирующий сигнал - на предыдущем шаге
(блок 16), а при непревышении заданного уровня допустимого дрейфа в качестве корректирующего сигнала принимается предыдущий корректирующий сигнал - на предыдущем шаге  (блок 17).
(блок 17).
При накоплении выделенных нулевых сигналов меньше заданного количества  (блок 7) производится прогнозирование компенсирующего сигнала по осредненным значениям выделенных нулевых сигналов как минимум четырех предыдущих измерений ωiдр(r)=ωiдд(p) (блок 8) дрейфа нулевого сигнала, например:
(блок 7) производится прогнозирование компенсирующего сигнала по осредненным значениям выделенных нулевых сигналов как минимум четырех предыдущих измерений ωiдр(r)=ωiдд(p) (блок 8) дрейфа нулевого сигнала, например:
 (блок 19). Результат этого прогноза используется для компенсации дрейфа нулевого сигнала
(блок 19). Результат этого прогноза используется для компенсации дрейфа нулевого сигнала  (блок 20).
(блок 20).
Для уменьшения объема вычислений в блоке 19 контролируется количество массивов, не удовлетворяющих условию блока 7. Если массив не удовлетворяет требованию блока 7 первый раз - в блоке 18 R=0, то в качестве корректирующего сигнала принимается результат расчета прогноза, произведенный в блоке 19. Если массив не удовлетворяют условию блока 7 во второй раз подряд - в блоке 18 R≠0, то новый расчет в блоке 19 не производится, а в качестве корректирующего сигнала принимается результат предыдущего расчета  (блок 20).
(блок 20).
В блоке 21 производится вычитание принятого для коррекции дрейфа нулевого сигнала  из измеренного входного сигнала
из измеренного входного сигнала  :
:  , где - измеренный сигнал до коррекции; ωi(n) - измеренный сигнал после коррекции; индекс i - наименование измерительных осей.
, где - измеренный сигнал до коррекции; ωi(n) - измеренный сигнал после коррекции; индекс i - наименование измерительных осей.
На фиг. 2 приведены результаты сравнения накопленной угловой погрешности курсового гироскопа STIM-210 норвежской фирмы Sensonor с компенсацией дрейфа нулевого сигнала (график 1) по предложенному изобретению и без компенсации (график 2).
Графики на фиг. 2 рассчитаны на основе экспериментально снятого массива нулевых сигналов микромеханического гироскопа  .
.
Как видно из приведенных графиков, накопленная за 2,5 часа угловая погрешность при осуществлении компенсации дрейфа нулевого сигнала по предлагаемому изобретению (график 1) уменьшилась почти на два порядка по сравнению с накопленной погрешностью без компенсации дрейфа нулевого сигнала (график 2): со 108 град, до 1,07 град.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Основы построения бесплатформенных инерциальных навигационных систем / В.В. Матвеев, В.Я. Распопов / Под общ. ред. д.т.н. В.Я. Распопова - СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009. - 280 с. ISBN 978-5-900780-73-3.
2. Инерциальная навигация. Под редакцией К.Ф. О Доннела. М.: Наука, 1969, 592 с.
3. Гироскопические системы, ч. II. Гироскопические приборы и системы / П.В. Бромберг, И.А. Михалев, Е.А. Никитин, В.А. Бауман, А.А. Балашова / Под ред. Д.С. Пельпора. - М.: Высшая школа, 1971. - 488 с.
4. Галкин В.И., Воробьев Д.Н., Крайнева Н.Н. Способ компенсации систематических составляющих дрейфа гироскопических датчиков и его реализация в трехосном микромеханическом измерителе параметров движения/ Заявка на изобретение №2015133432 от 11.08.15 г.
Способ определения прочностных характеристик и величины зерна в металлических материалах и сплавах
Способ получения супермногослойных разнородных материалов с наноразмерной структурой слоев
Способ получения микроструктурных многослойных композиционных материалов из разнородных металлов или сплавов
Способ управления бесплатформенной гировертикалью и устройство для его реализации
Способ формирования выходной информации в блоке гироскопов и трехосный блок демпфирующих гироскопов
Способ компенсации систематических составляющих дрейфа гироскопических датчиков
Способ сборки кольцевого резонатора лазерного гироскопа (варианты)
Трехосный микромеханический блок чувствительных элементов
Система астроинерциальной навигации
Способ получения листовых композиционных материалов с дисперсно-армированными частицами
Способ определения прочностных характеристик и величины зерна в металлических материалах и сплавах
Способ получения супермногослойных разнородных материалов с наноразмерной структурой слоев
Способ получения микроструктурных многослойных композиционных материалов из разнородных металлов или сплавов
Способ управления бесплатформенной гировертикалью и устройство для его реализации
Способ формирования выходной информации в блоке гироскопов и трехосный блок демпфирующих гироскопов
Способ компенсации систематических составляющих дрейфа гироскопических датчиков
Способ сборки кольцевого резонатора лазерного гироскопа (варианты)
Трехосный микромеханический блок чувствительных элементов
Система астроинерциальной навигации
Способ получения листовых композиционных материалов с дисперсно-армированными частицами

