Результат интеллектуальной деятельности: Система контроля местоположения поезда
Вид РИД
Изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах управления движением поезда для определения и контроля позиции поезда на пути.
Известно используемое в системе управления движением поезда техническое решение, в котором местоположение поезда определяется без применения на пути оборудования рельсовых цепей. В известном техническом решении бортовой GPS приемник спутниковой навигационной системы через блок привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером, вход и выход которого соединен с локомотивной радиостанцией, которая передает данные о местоположении поезда по радиоканалу на стационарный радиоприемопередатчик (центральный коммутатор системы радиосвязи), установленный в центре управления и связанный с информационно-управляющим сервером, который соединен с другими информационно-управляющими системами, например, с устройствами системы электрической централизации (RU 2419569, B61L 25/02, 27.05.11).
Недостатком известного технического решения является зависимость определения местоположение поезда от безотказного функционирования поездных средств, которая приводит к снижению безопасности движения на участке железнодорожного пути.
В качестве прототипа принята система контроля местоположения поезда, содержащая бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленный в центре управления информационно-управляющий сервер, первый вход и первый выход которого соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, в центре управления установлены сенсорное устройство слежения за передвижением поезда по перегону и блок формирования данных о местоположении головного и хвостового вагонов поезда, вдоль железнодорожного пути на заданном расстоянии от него проложен волоконно-оптический кабель с герметичной заглушкой и соединен с входом/выходом сенсорного устройства слежения за передвижением поезда по перегону, дополнительный выход которого соединен с первым входом блока формирования данных о местоположении головного и хвостового вагонов поезда, выход и второй вход которого соединены соответственно с третьим входом и третьим выходом информационно-управляющего сервера. (RU 2560227, B61L 25/02, 20.08.15).
К недостатку известной системы контроля местоположения поезда следует отнести невысокую точность определения занятости путевых участков, которая обусловлена тем, что отраженный оптический сигнал (рефлектограмма) распределения акустического воздействия по всей длине оптоволокна, поступающий с выхода сенсорного устройства непосредственно на первый вход блока формирования данных о местоположении головного и хвостового вагонов поезда представляет собой смесь сигналов, относящихся не только к виброакустическому воздействию на оптоволокно от контролируемого поезда, но и к посторонним источникам виброакустического воздействия на это же оптоволокно. Кроме того, уровень этого сигнала подвержен влиянию нестабильностей коэффициентов передачи в трактах преобразования виброакустического воздействия в оптические сигналы из-за влияния на характеристики оптоволокна переменных климатических факторов и отклонений от проектных значений реальных расстояний участков оптоволоконного кабеля от соответствующих контролируемых ими участков рельсового пути. В результате чего, в известной системе границы и параметры движения поезда определяются с большой погрешностью и поезда приходиться разграничивать увеличенными интервалами попутного следования, что снижает предельную пропускную способность системы. Также на поездах необходим контроль целостности состава из-за невозможности фиксации случаев отцепа вагонов на перегоне.
Не достаточный объем данных о параметрах движения поездов и данных об их достоверности, который поступает в аппаратуру электрической централизации от известной системы, снижает возможность по комплексному использованию этих данных вместе с сопоставимыми данными от других подсистем управления движением поездов для целей многоуровневого резервирования функций управления движением и, соответственно, для общего повышения надежности и безопасности управления движением поездов.
Технический результат изобретения заключается в повышении точности данных о местоположении головного и хвостового вагонов поезда.
Технический результат изобретения достигается тем, что в систему контроля местоположения поезда, содержащую бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии соединен с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, центр управления движением поездов, в котором установлены информационно-управляющий сервер, устройство электрической централизации, стационарный радиоприемопередатчик, сенсорное устройство слежения за движением поездов по перегону и блок формирования данных о местоположении головного и хвостового вагонов поезда, при этом первый вход и первый выход информационно-управляющего сервера соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, а третий вход и третий выход информационно-управляющего сервера соединены соответственно с первым выходом и первым входом блока формирования данных о местоположении головного и хвостового вагонов поезда, вход/выход сенсорного устройства слежения за передвижением поезда по перегону подключен к волоконно-оптическому кабелю с герметичной заглушкой, проложенному вдоль пути на заданном расстоянии, согласно изобретению введен блок интеллектуальной цифровой обработки рефлектограмм, вход которого подключен к дополнительному выходу сенсорного устройства слежения за движением поездов по перегону, а его выход соединен со вторым входом блока формирования данных о местоположении головного и хвостового вагонов поезда.
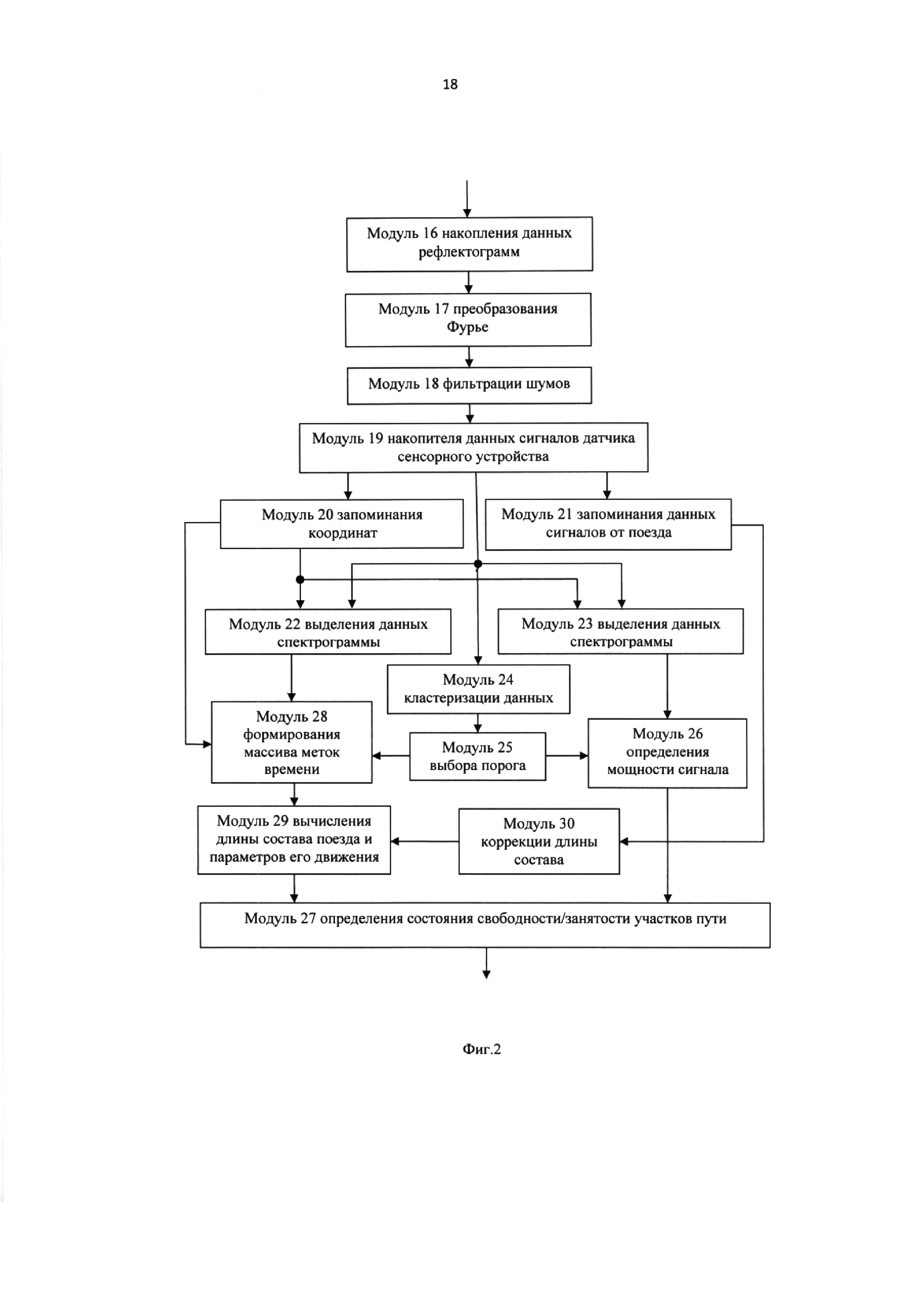
Блок интеллектуальной цифровой обработки рефлектограмм состоит из последовательно соединенных модуля накопления данных рефлектограмм, вход которого является входом блока интеллектуальной цифровой обработки рефлектограмм, модуля преобразования Фурье, модуля фильтрации шумов и модуля накопителя данных сигналов сенсорного устройства, первый выход которого соединен с входом модуля запоминания координат, второй выход соединен с первым входом модуля запоминания данных сигналов от поезда, принимаемого за эталон, а третий выход соединен с входами модуля выделения данных спектрограммы, соответствующих большим окрестностям установленных контрольных точек, модуля выделения данных спектрограммы, соответствующих малым окрестностям установленных контрольных точек, и модуля кластеризации данных, к которому подключен модуль выбора порога, ко вторым входам модуля выделения данных спектрограммы, соответствующих большим окрестностям установленных контрольных точек, и модуля выделения данных спектрограммы, соответствующих малым окрестностям установленных контрольных точек подключен выход модуля запоминания координат, выход модуля выделения данных спектрограммы, соответствующих малым окрестностям установленных контрольных точек, через модуль определения мощности сигнала, у которого второй вход подключен к первому выходу модуля выбора порога, соединен с первым входом модуля определения состояния свободности/занятости участков пути, выход модуля выделения данных спектрограммы, соответствующих большим окрестностям установленных контрольных точек, соединен с первым входом модуля формирования массива меток времени, второй и третий входы которого соединены соответственно со вторым выходом модуля выбора порога и со вторым выходом модуля запоминания координат, выход модуля формирования массива меток времени через модуль вычисления длины состава поезда и параметров его движения соединен со вторым входом модуля определения состояния свободности/занятости участков пути, выход которого является выходом блока интеллектуальной цифровой обработки рефлектограмм, выход модуля запоминания данных сигналов от поезда, принимаемого за эталон, через модуль коррекции длины состава соединен со вторым входом модуля вычисления длины состава поезда и параметров его движения.
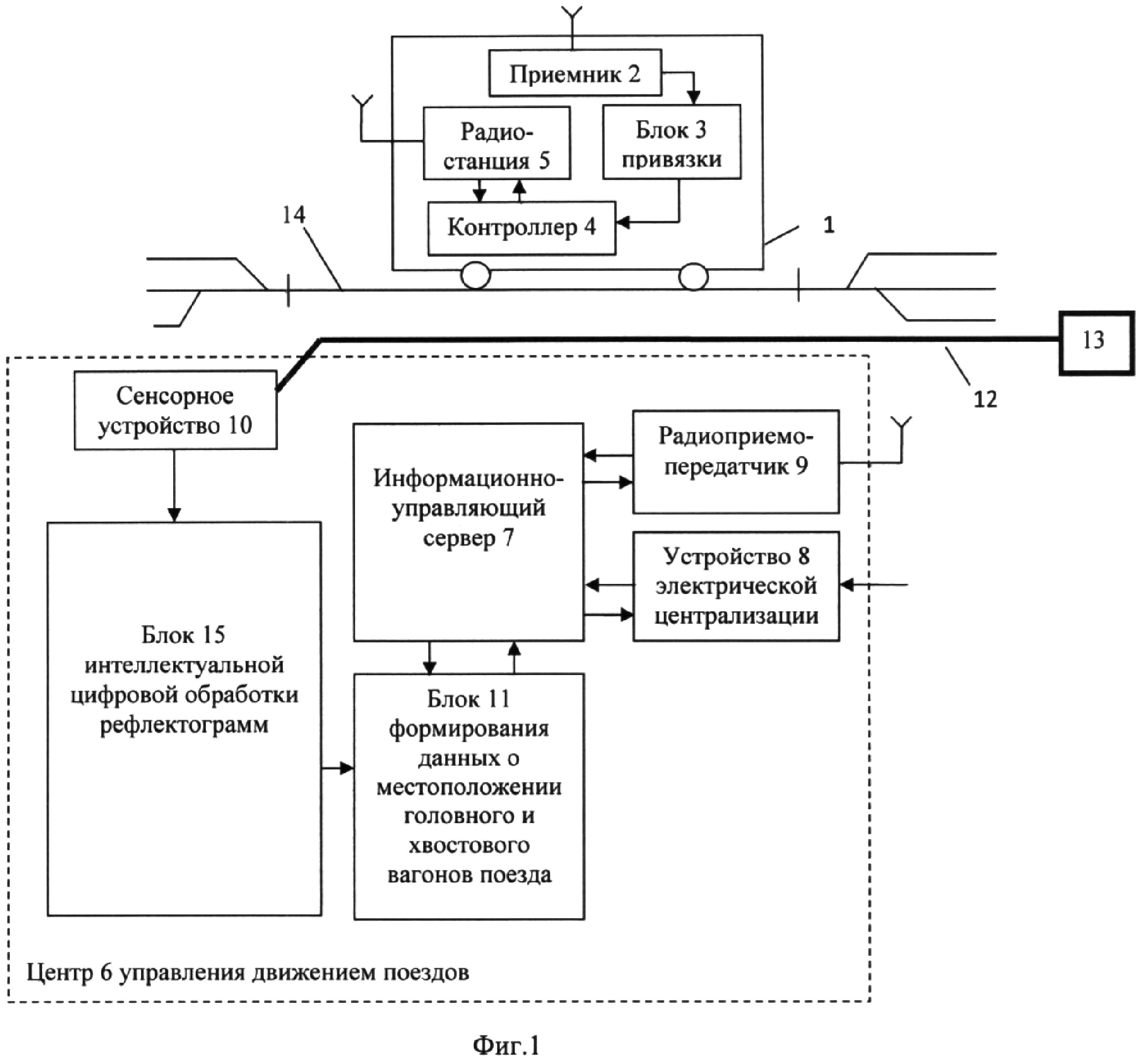
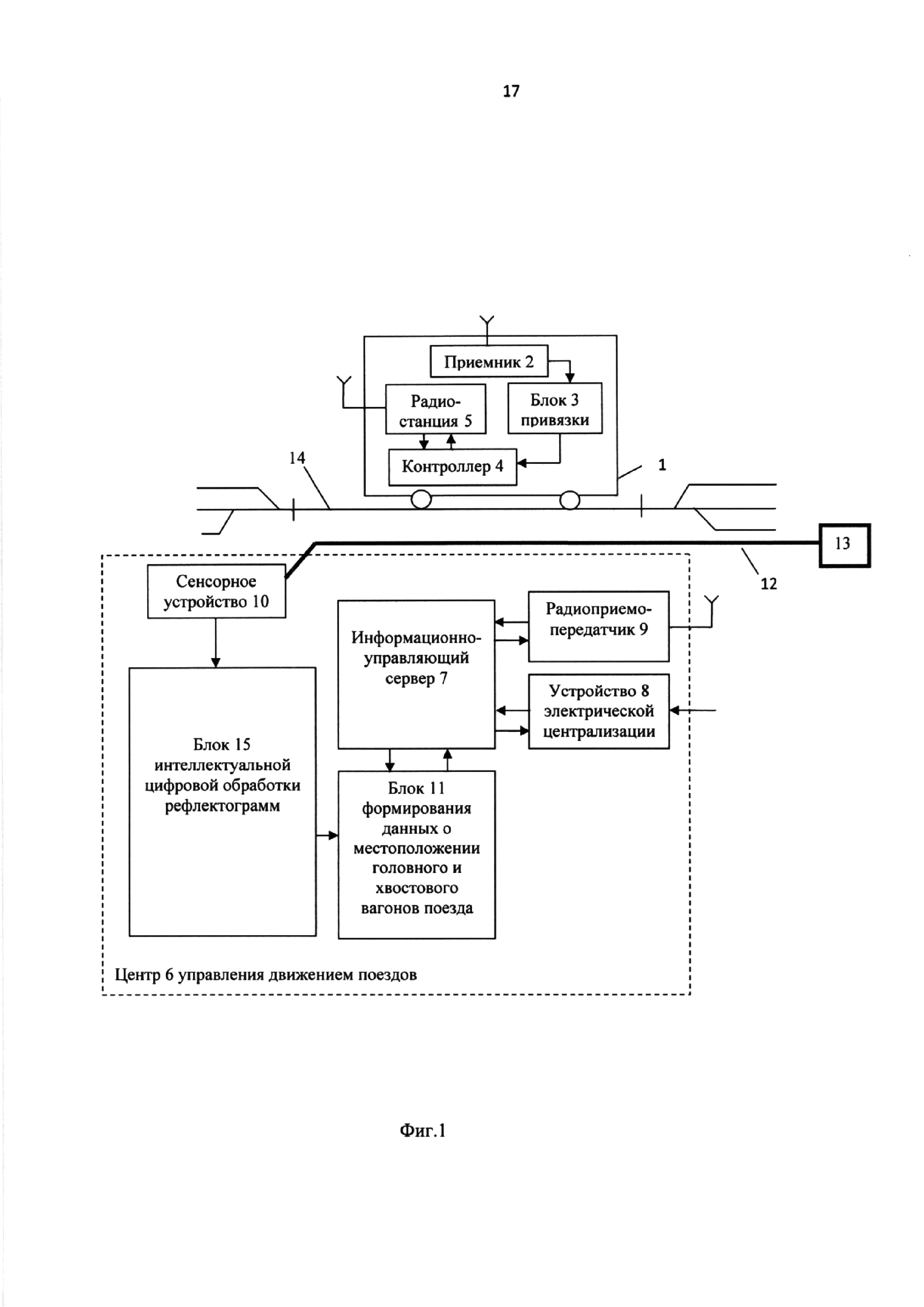
На чертеже (фиг.1) приведена схема предлагаемой системы контроля местоположения поезда. На фиг.2 приведена схема блока интеллектуальной цифровой обработки рефлектограмм, который в частном случае может быть выполнен на основе программных модулей.
Система контроля местоположения поезда 1 содержит бортовой приемник 2 спутниковой навигационной системы, выход которого через блок 3 привязки географических координат к трассе железнодорожной линии соединен с бортовым контроллером 4, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции 5, центр 6 управления движением поездов, в котором установлены информационно-управляющий сервер 7, устройство 8 электрической централизации, стационарный радиоприемопередатчик 9, сенсорное устройство 10 слежения за движением поездов по перегону и блок 11 формирования данных о местоположении головного и хвостового вагонов поезда, при этом первый вход и первый выход информационно-управляющего сервера 7 соединены соответственно с выходом и входом устройства 8 электрической централизации, второй вход и второй выход информационно-управляющего сервера 7 соединены соответственно с выходом и входом стационарного радиоприемопередатчика 9, а третий вход и третий выход информационно-управляющего сервера соединены соответственно с первым выходом и первым входом блока 11 формирования данных о местоположении головного и хвостового вагонов поезда, вход/выход сенсорного устройства 10 слежения за передвижением поезда по перегону подключен к волоконно-оптическому кабелю 12 с герметичной заглушкой 13, проложенному вдоль пути 14 на заданном расстоянии, блок 15 интеллектуальной цифровой обработки рефлектограмм своим входом подключен к дополнительному выходу сенсорного устройства 10 слежения за движением поездов по перегону, а его выход соединен со вторым входом блока 11 формирования данных о местоположении головного и хвостового вагонов поезда.
Блок 15 интеллектуальной цифровой обработки рефлектограмм состоит из последовательно соединенных модуля 16 накопления данных рефлектограмм, вход которого является входом блока 15 интеллектуальной цифровой обработки рефлектограмм, модуля 17 преобразования Фурье, модуля 18 фильтрации шумов и модуля 19 накопителя данных сигналов сенсорного устройства, первый выход которого соединен с входом модуля 20 запоминания координат, второй выход соединен с первым входом модуля 21 запоминания данных сигналов от поезда, принимаемого за эталон, а третий выход соединен с входами модуля 22 выделения данных спектрограммы, соответствующих большим окрестностям установленных контрольных точек, модуля 23 выделения данных спектрограммы, соответствующих малым окрестностям установленных контрольных точек, и модуля 24 кластеризации данных, к которому подключен модуль 25 выбора порога, ко вторым входам модуля 22 выделения данных спектрограммы, соответствующих большим окрестностям установленных контрольных точек, и модуля 23 выделения данных спектрограммы, соответствующих малым окрестностям установленных контрольных точек подключен выход модуля 20 запоминания координат, выход модуля 23 выделения данных спектрограммы, соответствующих малым окрестностям установленных контрольных точек, через модуль 26 определения мощности сигнала, у которого второй вход подключен к первому выходу модуля 25 выбора порога, соединен с первым входом модуля 27 определения состояния свободности/занятости участков пути, выход модуля 22 выделения данных спектрограммы, соответствующих большим окрестностям установленных контрольных точек, соединен с первым входом модуля 28 формирования массива меток времени, второй и третий входы которого соединены соответственно со вторым выходом модуля 25 выбора порога и со вторым выходом модуля 20 запоминания координат, выход модуля 28 формирования массива меток времени через модуль 29 вычисления длины состава поезда и параметров его движения соединен со вторым входом модуля 27 определения состояния свободности/занятости участков пути, выход которого является выходом блока 15 интеллектуальной цифровой обработки рефлектограмм, выход модуля 21 запоминания данных сигналов от поезда, принимаемого за эталон, через модуль 30 коррекции длины состава соединен со вторым входом модуля 29 вычисления длины состава поезда и параметров его движения.
Система контроля местоположения поезда работает следующим образом.
Местоположение поезда 1 на пути 14 перегона обнаруживается локационным методом, осуществляемым установленным в центре 6 управления сенсорным устройством 10 слежения за движением поезда по перегону (рефлектометром). Вход/выход сенсорного устройства 10 слежения за движением поезда по перегону подключен к волоконно-оптическому кабелю 12 (распределенному чувствительному элементу, который является стандартным телекоммуникационным одномодовым волокном) посредством оптического блока (на чертеже не показан), входящего в состав рефлектометра.
Когерентный источник излучения, входящий в состав сенсорного устройства 10 слежения за передвижением поезда, вводит в волоконно-оптический кабель 12 с герметичной заглушкой 13 периодически с заданной частотой короткие оптические импульсы (длина импульса зависит от длины кабеля). Отраженная световая волна, поступающая на вход сенсорного устройства 10 регистрируется фотодетектором рефлектометра. Сигнал в виде рефлектограммы распределения акустического воздействия по всей длине волокна передается с выхода сенсорного устройства 10 по интерфейсу программного обеспечения Ethernet в блок 15 интеллектуальной цифровой обработки рефлектограмм, с выхода которого данные о поездном положении на линии поступают на первый вход блока 11 формирования данных о местоположении головного и хвостового вагонов поезда.
При акустической вибрации волоконно-оптического кабеля 12, вызываемой движением поездов, происходит изменение отражения сигнала. Блок 11 формирует данные о местоположении головного и хвостового вагонов в поезде после интеллектуальной цифровой обработки рефлектограмм блоком 15 в режиме реального времени. Блок 11 выдает решение о занятости или свободности участков пути, ограниченных контрольными точками. Он определяет занятие участка пути, когда его внутренний пороговый элемент (на чертеже не показано) определяет наличие движущегося поезда на границе участка пути и определяет освобождение участка пути, накапливая данные о поездах, занимающих участки пути, и сравнивая с указанными данными параметры поездов покидающих участки пути.
При этом блок 11 фиксирует положения и скорости движения, как головного, так и хвостового вагонов поезда, и сравнением координат их положения с известной длиной состава поезда контролирует целостность подвижного состава, а также по изменению их координат контролирует направление движения поезда.
Функционирование блока 11 по контролю передвижения поезда начинается с момента поступления на его первый вход сигнала старта с третьего выхода информационно-управляющего сервера 7. Сигнал старта формируется информационно-управляющим сервером 7 при открытии выходного светофора для выхода поезда на перегон.
С выхода блока 11 данные о местоположении головного вагона и хвостового вагона поезда, целостности подвижного состава, скорости и направлении его движения, а также данные о достоверности ранее перечисленных полученные вероятностными методами расчета передаются на третий вход информационно-управляющего сервера 7.
Программным обеспечением информационно-управляющего сервера 7 информация о передвижении поезда привязывается к плану перегона для отображения на мониторе оператора центра 6 управления движением поезда по перегону. С использованием информации о местоположении поезда информационно-управляющий сервер 7 формирует сообщение о поездной ситуации на перегоне.
Информация от бортового приемника 2 спутниковой навигационной системы (GPS приемника) поступает через блок 3 привязки географических координат к трассе железнодорожной линии в бортовой контроллер 4 и затем через выход бортового контроллера 4 на вход локомотивной радиостанции 5. От локомотивной радиостанции 5 информация о местоположении поезда передается в стационарный радиоприемопередатчик 9. По интерфейсу RS-485 она поступает на второй вход информационно-управляющего сервера 7, где сопоставляется с аналогичной информацией от блока 11 формирования данных о местоположении головного и хвостового вагонов поезда для формирования точного местоположения поезда.
Для повышения точности определения блоком 11 данных о местоположении головного и хвостового вагонов поезда, в предлагаемом устройстве исходные сигналы с выхода сенсорного устройства 10 (рефлектограмма распределения акустического воздействия по всей длине волокна) через блок 15 интеллектуальной цифровой обработки рефлектограмм поступают в блок 11 формирования данных о местоположении головного и хвостового вагонов поезда для логической обработки вместе с информационными сигналами несущими дополнительную логическую и контрольную информацию.
По данным рефлектометра из блока 10 определяются параметры поездов (длина, скорость, направление движения), следующих по железнодорожной линии, вдоль которой уложен оптоволоконный кабель, а также факты проследования поездами отдельных точек на линии и участков пути.
Для решения этих задач в блоке 15 интеллектуальной цифровой обработки рефлектограмм выполняется выделение полезных сигналов от виброакустических воздействий, связанных с движением поездов по линии, от прочих сигналов. Также устанавливаются точки с высоким соотношением сигнал/шум и определяются точные моменты въезда и выезда каждого поезда в каждую координату оптоволокна, принадлежащую окрестностям данных точек.
Блок 15 формирует спектрограмму по данным рефлектометра. Для фильтрации посторонних шумов используется переход в спектральную область. Рефлектограмма представляется в виде числового массива соответствующего интенсивности обратно рассеянного излучения в кабеле. Модуль 16 накопления данных рефлектограмм сохраняет фиксированное число идущих подряд рефлектограмм. Преобразование данных по накопленному набору рефлектограмм реализуется модулем 17, выполняющим преобразование Фурье. Модуль 18 за счет фильтрации шумов спектрограмм формирует спектрограмму с уменьшенным уровнем посторонних шумов. Модуль 19 накопления данных сенсорного устройства 10 (при проследовании поездов) определяет массив пороговых значений, отделяющий сигнал от поезда от шума и преобразует спектрограмму в бинарные матрицы в соответствии с полученным порогом для дальнейшего определения параметров поездов и фактов проследования поездами отдельных точек и участков пути. Модуль 20 запоминания координат с высоким соотношением сигнал/шум, статистически определяет точки (контрольные точки), которые могут служить границами участка пути, занятие и освобождение которого возможно достоверно контролировать по данным виброакустического датчика. Модуль 21 запоминания данных сигналов от поезда, принимаемого за эталон, использует накопленные данные для последующей коррекции вычисляемых параметров прочих поездов, поскольку они косвенным образом содержат информацию о расстоянии от оптоволоконного кабеля до железнодорожного пути в каждой координате оптоволокна. Модуль 22 выделения данных спектрограммы, соответствующих большим окрестностям установленных контрольных точек и модуль 23 выделения данных спектрограммы, соответствующих малым окрестностям установленных контрольных точек используются для выделения данных спектрограммы, соответствующих большим и малым окрестностям установленных контрольных точек. Модуль 24 кластеризации данных использует алгоритм автоматической кластеризации данных (EM-алгоритм) для отделения полезного сигнала от шума. Модуль 25 определения мощности сигнала в малых окрестностях границ участков вырабатывает данные, которые используются для решения о занятии и освобождении участков пути. Модуль 28 формирования массива меток времени въезда/выезда поезда в/из каждой координаты оптоволокна формирует данные, которые используются для вычисления длины скорости и направления движения поезда, а также для оценок достоверности этих величин. Вычисление длины поезда, производится суммированием за каждый дискретный момент времени, в который поезд находился в контрольной точке, перемещений со средними скоростями движения головы и хвоста поезда. Модуль 25 выбора порога определяет массив пороговых значений. Он преобразует подматрицы спектрограммы, соответствующие окрестности каждой контрольной точки в бинарные матрицы в соответствии с выбранными порогами. Данный массив обновляется при проследовании поездов по линии. При этом для вычисления параметров поезда используется порог, индивидуальный для данного поезда. А для определения фактов проследования поездами контрольных точек используется обновляемый фиксированный порог, от поезда не зависящий. Обновление порога используется для устранения влияния погодных условий на работу данной системы. Модуль 29 вычисления длины состава поезда и параметров его движения использует суммирование за каждый дискретный момент времени, в который поезд находился в контрольной точке, перемещений со средней скоростью между вычисленными скоростями движения головы и хвоста поезда. По бинарной матрице он вычисляет значения параметров поезда для определения освобождения участков пути и вывода оператору информации о поездах, следующих по линии. Модуль 30 коррекции длины состава, с учетом данных об эталонном поезде, использует данные сигнала от поезда, принимаемого за эталон, для коррекции полученной длины поезда. Данный модуль необходим, ввиду зависимости вычисленной длины поезда от удаления кабеля от пути. Сигналы о состоянии объектов на станции, несущие информацию, например, о номере маршрута, состоянии станционных секций, передаются от устройства 8 электрической централизации на первый вход информационно-управляющего сервера 7, который формирует сообщение о поездной ситуации на станции. Сформированные сообщения (управляющие команды по движению) поступают со второго выхода информационно-управляющего сервера 7 в стационарный радиоприемопередатчик 9 для их передачи по радиоканалу на локомотивную радиостанцию 5. С выхода локомотивной радиостанции 5 управляющие команды по движению поступают в бортовой контроллер 4, который обеспечивает отображение управляющих команд движения на информационном табло (на чертеже не показано) машиниста, для принятия решений по управлению движением поезда.
Предлагаемая система контроля местоположения поезда обеспечивает повышение точности данных о местоположении головного и хвостового вагонов поезда и, как следствие, повышение надежности и безопасности работы системы управления движением поездов.
Устройство бортовой аппаратуры автоматической локомотивной сигнализации
Система для оперативного управления поездной работой участка железной дороги
Система для управления работой сортировочных станций направления железнодорожной сети
Волоконно-оптический датчик для мониторинга железнодорожного пути
Способ определения времени проведения очередного профилактического обслуживания объекта и система для его реализации
Способ и устройство обмена информацией по радиоканалу между поездным локомотивом и стационарным пунктом
Система для управления устройством лубрикации на локомотиве-рельсосмазывателе
Устройство для вентиляции вагонов
Система контроля поверхности катания железнодорожной колесной пары
Устройство для осмотра вагонов
Способ интервального регулирования движения поездов на перегоне с автоблокировкой и устройство для его осуществления
Станционное устройство для системы регулирования движения поездов
Информационное вагонное табло
Комбинированное колесо

