Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЕРЕМЕЩЕНИЯ ИСТОЧНИКА ЗОНДИРУЮЩИХ СИГНАЛОВ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения гидролокационных сигналов (ОГС) в современных гидроакустических комплексах.
Зондирующие сигналы, излучаемые гидролокаторами, размещенными на различных носителях, в том числе и подвижных, могут быть обнаружены на больших дистанциях с использованием известных систем обнаружения гидролокационных сигналов.
(Ю.А. Корякин С.А. Смирнов Г.В. Яковлев «Корабельная гидроакустическая техника» СПб., Наука, 2004 г., стр.89-92). При обнаружении этих сигналов возникает задача измерения параметров зондирующего сигнала, а так же задача определения скорости перемещения источника зондирующего сигнала и дистанции до него.
Известны методы обнаружения местоположения источника зондирующих сигналов, изложенные в работе А.А. Простаков «Гидроакустические средства флота» М., 1974 г., стр.90. В работе рассматривается задача определения места случайной цели, излучающей импульсные сигналы при использовании нескольких приемных постов. Измеряются разности времени прихода звука к каждому приемнику, которые в свою очередь соответствуют разности расстояний от источника звука до соответствующих приемников. Как известно, геометрическим местом точек разность расстояний которых до приемников постоянна, является гипербола. Определив точку пересечения рассчитанных гипербол, можно найти место источника звука и соответственно дистанцию до него.
В ряде случаях эта задача может быть решена с использованием триангуляционного метода при применении нескольких приемников или по оценке нескольких пеленгов. (В.И. Дмитриев и др. «Навигация и лоция» М., 2009 г., стр.278). Аналогично можно определить местоположение объекта при приеме серии импульсов и при сложном маневрировании, для чего необходимо длительное время работы гидролокатора и длительное время фиксированного маневрирования, что не всегда возможно и целесообразно (Сборник «50 лет ЦНИИ «Морфизприбор» СПб., 1999 г., стр.149. Ю.А. Корякин С.А.Смирнов Г.В.Яковлев «Корабельная гидроакустическая техника» СПб., Наука, 2004 г. стр.67). Тем не менее, этот способ является наиболее близким аналогом и может быть принят за прототип.
Способ содержит следующие операции:
- производят последовательный прием зондирующих сигналов,
- определяют момент времени прихода первого принятого зондирующего сигнала
- измеряют направление прихода сигнала,
- изменяют собственное положение приемника зондирующих сигналов,
- определяют скорость движения приемника зондирующих сигналов,
- определяют время приема следующего сигнала в новой точке местоположения приемника,
- измеряют направление на источник сигнала в новой точке нахождения приемника.
По измеренным пеленгам и по измеренному пройденному расстоянию определяют положение точки пересечения;
По двум углам и стороне определяют стороны треугольника, которые и будут равны дистанции до источника зондирующих сигналов.
Повторив измерения и получив новую дистанцию, можно определить скорость перемещения источника излучения.
Для осуществления этого способа необходимо, чтобы источник зондирующего сигнала (гидролокатор), параметры которого определяют, работал непрерывно, а это не всегда имеет место. Другим недостатком способа является необходимость сложной схемы маневрирования приемника зондирующих сигналов, которая требует много времени. За это время положение движущегося гидролокатора может существенно измениться, что приведет к ошибке определения скорости перемещения источника зондирующего сигнала и дистанции до него
В задачах обнаружения гидролокационных сигналов принимаются сигналы от гидролокаторов, установленных на движущихся носителях, при этом время излучения этих сигналов ограничено, и задача определения радиальной скорости движущегося гидролокатора и дистанции до него существующими методами не может быть решена.
Техническим результатом предлагаемого технического решения является обеспечение возможности определения скорости перемещения источника зондирующего сигнала и дистанции до него.
Для достижения указанного технического результата в способ содержащий, последовательный прием зондирующих сигналов перемещающегося источника, определение момента времени прихода первого принятого зондирующего сигнала, введены дополнительные признаки, а именно: последовательно измеряют моменты времени ti приема еще n зондирующих сигнала, где n не менее 3-х, определяют временной интервал Tk между моментами прихода каждых двух следующих друг за другом зондирующих сигналов Tk=ti+1-ti, определяют разность измеренных временных интервалов ΔTm=Tk+1-Tk, измеряют скорость звука С, определяют расстояние, проходимое перемещающимся источником зондирующего сигнала за время между двумя следующими один за другим зондирующими сигналами L=СΔTm, определяют половину временного интервала между моментами прихода первых двух зафиксированных следующих один за другим зондирующих сигналов Tcpk=(ti+1-ti)/2, определяют средний временной интервал между моментами прихода первого и третьего зондирующих сигналов Tcpk+1=(ti+2- ti)/3, первого и четвертого зондирующих сигналов Tcpk+2=(ti+3-ti)/4, определяют средний временной интервал Тср как Тср=(Tcpk+Tcpk+1+Tcpk+2)/3, и радиальную скорость перемещающегося источника зондирующего сигнала Vp определяют как Vp=L/Тср, а для определения дистанции Дп до перемещающегося источника зондирующего сигнала в момент tn приема зондирующего сигнала определяют время распространения этого зондирующего сигнала Траспр как интервал между временем приема зондирующего сигнала в момент tn и временем приема предыдущего зондирующего сигнала Tk=tn- tn-1 за вычетом среднего интервала между зондирующими сигналами Траспр.=Tk-Тср и Дп определяют как Дп=Траспр.С, а дистанцию до перемещающегося источника зондирующего сигнала в момент излучения первого принятого зондирующего сигнала Д0 определяют из выражения Д0=Дп-nL с учетом знака измерения L.
Поясним достижение технического результата.
Как правило, работа гидролокатора, являющегося источником зондирующего сигнала, имеет свой целью обзор пространства и обнаружение какого - либо объекта по наличию эхосигнала от него. Дальность распространения зондирующего сигнала гидролокатора существенно больше, чем дальность обнаружения отраженного эхосигнала. Поэтому зондирующий сигнал обнаруживается приемным устройством системы ОГС практически всегда при первых же сигналах излучения, вероятность пропуска такого сигнала прямого распространения чрезвычайно мала. Излучения зондирующего сигнала происходят в фиксированных точках по дистанции при движении гидролокатора, через определенный интервал времени, величина которого выбирается в зависимости от шкалы работы гидролокатора и определяется частотой повторения зондирующего сигнала или скважностью излучения. Если гидролокатор неподвижен и приемник неподвижен, то интервал времени между зондирующими сигналами и интервал времени между принятыми приемным устройством системы ОГС сигналами будут одинаковы. Если излучатель движется или приемник движется, то интервал времени между принятыми зондирующими сигналами будет отличаться от интервала времени между излученными зондирующими сигналами. При сближении объектов интервал времени между принятыми зондирующими сигналами будет меньше, чем интервал времени между излученными зондирующими сигналами. При расхождении объектов интервал времени между принятыми сигналами будет больше, чем интервал времени между излученными сигналами. Изменение величины интервала будет определяться скоростью изменения расстояния. Величину изменения интервала времени между принимаемыми зондирующими сигналами можно определить, если измерить разность между интервалами времен прихода нескольких следующих друг за другом зондирующих сигналов, первый сигнал из которых принимается за опорный. Для этого необходимо зафиксировать время прихода первого зондирующего сигнала и относительно него зафиксировать время прихода трех следующих друг за другом зондирующих сигналов. После этого определяют попарно интервалы времени между моментами прихода этих зондирующих сигналов. На следующем этапе измеряется разность интервалов времени, измеренных попарно. Эта разность интервалов и будет определять скорость изменения расстояния между принятыми зондирующими сигналами, которая зависит от скорости движения гидролокатора и от времени излучения зондирующих сигналов гидролокатора. Некоторое отличие имеет флюктуационный характер и определяется ошибкой точности измерения времени приема сигналов, флюктуацией распространения зондирующего сигнала в среде и стабильностью положения источника зондирующего сигнала в пространстве и приемника. Расстояние, проходимое гидролокатором за интервал времени между зондирующими сигналами, можно получить, если умножить измеренный временной интервал на измеренную скорость распространения звука в морской воде. Это расстояние между точками по дистанции, в которых происходит излучение зондирующих сигналов движущегося с постоянной скоростью гидролокатора. Для определения величины скорости сближения или расхождения гидролокатора необходимо определить время между зондирующими сигналами гидролокатора или скважность излучения.
Временной интервал между зондирующими сигналами можно определить как среднее значение от трех полученных оценок времени. Первая оценка времени соответствует половине времени между моментами приема первых двух зондирующих сигналов, вторая оценка времени соответствует времени между первым зондирующим сигналом и третьим зондирующим сигналом, деленным на 3, третья оценка соответствует времени между приемом первого зондирующего сигнала и временем приема четвертого зондирующего сигнала, деленного на 4.
Окончательную оценку скважности излучения зондирующих сигналов можно получить, определив среднее от трех полученных оценок. Полученная окончательная оценка приближенно будет близка к искомому интервалу времени между излучениями зондирующих сигналов гидролокатора. Таким образом, имеется расстояние, проходимое гидролокатором за время между моментами приема зондирующего сигнала и средняя оценка интервала между моментами приема зондирующего сигнала. Разделив измеренное расстояние, проходимое гидролокатором между моментами излучения зондирующего сигнала, на среднюю оценку интервала между моментами приема зондирующих сигналов получим скорость движения гидролокатора. Для определения дистанции излучения последнего принятого зондирующего сигнала гидролокатора необходимо определить время распространения последнего сигнала гидролокатора до места нахождения приемника системы ОГС. Для этой цели определяют временной интервал между моментом приема последнего сигнала и моментом приема предыдущего сигнала, после чего из полученной разности вычитают среднюю оценку временного интервала между принятыми зондирующими сигналами и получают время распространения последнего зондирующего сигнала от гидролокатора до приемника. Умножая время распространения последнего зондирующего сигнала гидролокатора до приемника на скорость звука, можно получить дистанцию от приемника системы ОГС до точки излучения последнего зондирующего сигнала гидролокатора. Дистанция, на которой был излучен первый принятый зондирующий сигнал гидролокатора, определяется как разность дистанции излучения последнего зондирующего сигнала гидролокатора и произведения числа посылок на измеренное расстояние, проходимое гидролокатором между излучаемыми зондирующими сигналами, с учетом знака измеренной оценки расстояния. Последнее условие определяет сближения приемника и гидролокатора или их расхождение. При сближении измеренная оценка расстояния имеет отрицательный знак, что говорит о сокращении расстояния, и при вычислении исходной дистанции происходит сложение последней дистанции и пройденных расстояний между зондирующими сигналами. При расхождении гидролокатора и приемника величина оценки расстояния между зондирующими сигналами гидролокатора имеет положительный знак, и при вычислении исходной дистанции первого принятого зондирующего сигнала гидролокатора из оценки дистанции последнего зондирующего сигнала будет вычитаться произведение числа посылок без одной на измеренное расстояние.
Сущность изобретения поясняется фиг.1, на которой приведена блок-схема устройства, реализующего предлагаемый способ.
Устройство содержит антенну 1, соединенную через приемное устройство 2, блок 4 определения моментов времени приема зондирующих сигналов, первый выход блока 5 определения временных интервалов между моментами прихода зондирующих сигналов, блок 6 определения временных интервалов со входом блока 8 определения радиальной скорости движения источника зондирующих сигналов. Измеритель 3 скорости звука через первый вход блока 7 определения расстояния, проходимого гидролокатором за временной интервал между моментами излучения зондирующих сигналов, соединен со вторым входом блока 8, а второй выход блока 5 соединен со вторым входом блока 7. Второй выход блока 4 соединен со вторым входом блока 6. Третий выход блока 4 соединен с первым входом блока 9 определения дистанции, на которой был излучен принятый зондирующий сигнал. Второй вход блока 9 соединен со вторым выходом блока 6, а третий его вход с третьим выходом блока 7.
Работу предлагаемого способа целесообразно рассмотреть совместно с описанием работы устройства, реализующего способ.
Зондирующие сигналы движущегося источника (гидролокатора) принимаются антенной 1 и поступают на вход приемного устройства 2, где усиливаются, подвергаются фильтрации и преобразуются в цифровой вид, удобный для дальнейшей обработки и измерения с необходимой точностью. Антенна 1, приемное устройство 2 являются известными устройствами, реализованными в системах обнаружения гидролокационных сигналов ОГС. Сигналы, преобразованные в цифровой вид, обрабатываются специальными цифровыми процессорами на основе разработанных алгоритмов, (см. Ю.А. Корякин С.А. Смирнов Г.В. Яковлев «Корабельная гидроакустическая техника» СПб., Наука, 2004 г., стр.164-176, стр.278-295). В процессоре реализуются все блоки предлагаемого устройства. В блоке 4 происходит определение моментов времени прихода последовательности принятых зондирующих сигналов, запоминаются времена прихода и передаются измеренные оценки в блок 5 определения временных интервалов между последовательными сигналами и определение разности временных интервалов принятых последовательных сигналов. Измеренная оценка разности временных интервалов поступает в блок 7 для определения расстояния, проходимого движущимся гидролокатором между моментами излучения зондирующих сигналов, на второй вход которого поступает среднее значение скорости звука для данного района работы из блока 3 измерителя скорости звука. Измеритель скорости звука является известным устройством, который используется во всех гидроакустических комплексах, (см. Ю.А. Корякин С.А. Смирнов Г.В. Яковлев «Корабельная гидроакустическая техника» СПб., Наука, 2004 г., стр.300). В блоке 7 определяется расстояние, проходимое движущимся гидролокатором между излучениями зондирующего сигнала, полученная оценка расстояния между зондирующими сигналами передается в блок 8 измерение радиальной скорости движения. Со второго выхода блока 4 моменты времени передаются на второй вход блока 6, где определяется средний временной интервал между принятыми сигналами движущегося гидролокатора, который поступает на второй вход блока 8. Для определения дистанции до источника в момент излучения последнего принятого зондирующего сигнала, выбирается интервал времени между моментом приема последнего зондирующего сигнала и моментом приема предыдущего зондирующего сигнала, которые поступают из блока 4 определения моментов времени приема последовательности сигналов в блок 9 определения дистанции, на второй вход которого поступает значение среднего временного интервала между зондирующими сигналами из блока 6, а на третий вход из блока 7 поступает расстояние между сигналами и используемая скорость звука. В блоке 9 производятся элементарные вычислительные операции, результатами которых является оценка дистанции от приемника до точки, на которой был излучен последний принятый сигнал и оценка дистанции до точки, на которой был излучен первый принятый сигнал.
Таким образом, без маневрирования, только путем измерения временных интервалов и скорости звука, а так же простых математических операций над ними удается определить дистанцию до перемещающегося источника зондирующего сигнала и его радиальную скорость.
Способ измерения параметров перемещения источника зондирующих сигналов, содержащий последовательный прием зондирующих сигналов перемещающегося источника, определение момента времени прихода первого принятого зондирующего сигнала, отличающийся тем, что: последовательно измеряют моменты времени t приема еще n зондирующих сигналов, где n не менее 3-х, определяют временной интервал Т между моментами прихода каждых двух следующих друг за другом зондирующих сигналов T=t-t, определяют разность измеренных временных интервалов ΔТ=Т-T, измеряют скорость звука С, определяют расстояние, проходимое перемещающимся источником зондирующего сигнала за время между двумя следующими один за другим зондирующими сигналами L=СΔТ, определяют половину временного интервала между моментами прихода первых двух следующих один за другим зондирующих сигналов T=(t-t)/2, определяют средний временной интервал между моментами прихода первого и третьего зондирующих сигналов T=(t-t)/3, первого и четвертого зондирующих сигналов T=(t-t)/4, определяют средний временной интервал Т как Т=(T+T+T)/3, и радиальную скорость перемещающегося источника зондирующего сигнала V определяют как V=L/Т, а для определения дистанции до перемещающегося источника зондирующего сигнала Д определяют время распространения последнего сигнала как разность между временем приема последнего сигнала и временем приема предыдущего сигнала T=t-t за вычетом среднего интервала между принятыми зондирующими сигналами Т=T-Т и Д определяют как Д=TC, a дистанцию до перемещающегося источника зондирующего сигнала в момент излучения первого принятого зондирующего сигнала Д определяют из выражения Д=Д-nL с учетом знака измерения L.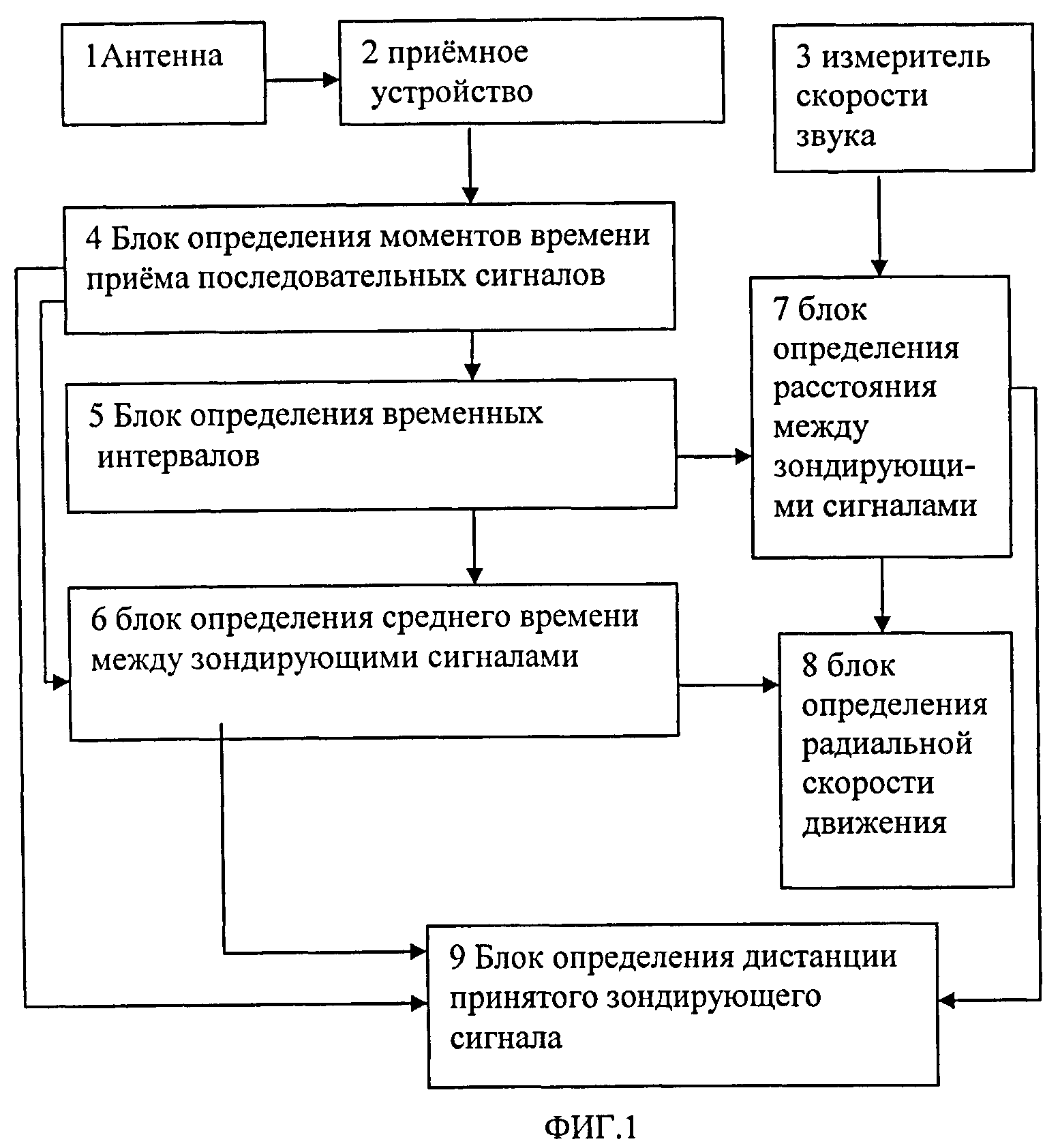
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ определения параметров торпеды
Устройство постановки и выборки гибкой протяженной буксируемой антенны
Способ дистанционного определения осадки, толщины и высоты льда
Гидроакустическая система
Гидроакустическая станция для надводного корабля
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ определения параметров торпеды
Устройство постановки и выборки гибкой протяженной буксируемой антенны
Способ дистанционного определения осадки, толщины и высоты льда
Гидроакустическая система
Гидроакустическая станция для надводного корабля
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука

