Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ИЗМЕНЕНИЯ КУРСОВОГО УГЛА ДВИЖЕНИЯ ИСТОЧНИКА ЗОНДИРУЮЩИХ СИГНАЛОВ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения гидролокационных сигналов (ОГС) в современных гидроакустических комплексах.
Зондирующие сигналы, излучаемые гидролокаторами, размещенными на различных носителях, в том числе и подвижных, могут быть обнаружены на больших дистанциях с использованием известных систем обнаружения гидролокационных сигналов (Ю.А.Корякин, С.А.Смирнов, Г.В.Яковлев, «Корабельная гидроакустическая техника», СПб, Наука, 2004 г., стр.89-92). При обнаружении этих сигналов возникает задача измерения параметров зондирующего сигнала, а также задача определения направления и курсового угла движения источника зондирующего сигнала.
Известны методы обнаружения местоположения источника зондирующих сигналов, изложенные в работе А.А.Простаков «Гидроакустические средства флота», М.: 1974 г., стр.90. В работе рассматривается задача определения места случайной цели, излучающей импульсные сигналы при использовании нескольких приемных постов. Измеряются разности времени прихода звука к каждому приемнику, которые в свою очередь соответствуют разностям расстояний от источника звука до соответствующих приемников. Как известно, геометрическим местом точек, разность расстояний которых до приемников постоянна, является гипербола. Определив точку пересечения рассчитанных гипербол, можно найти место источника звука и соответственно дистанцию до него, определить следующее место источника сигналов, построить траекторию движения источника и определить курсовой угол движения источника сигналов.
В ряде случаях эта задача может быть решена с использованием триангуляционного метода при применении нескольких приемников или по оценке нескольких пеленгов (В.И.Дмитриев и др. «Навигация и лоция», Москва, 2009 г., стр.278.). Аналогично можно определить местоположение источника зондирующих сигналов при приеме серии импульсов и при сложном маневрировании, для чего необходимо длительное время работы наблюдаемого гидролокатора и длительное время фиксированного маневрирования, что не всегда возможно и целесообразно (Сборник «50 лет ЦНИИ. Морфизприбор», СПб., 1999 г., стр.149. Ю.А.Корякин, С.А.Смирнов, Г.В.Яковлев, «Корабельная гидроакустическая техника», СПб, Наука, 2004 г., стр.67.). Тем не менее, этот способ является наиболее близким аналогом и может быть принят за прототип.
Способ содержит последовательный прием зондирующих сигналов, излучаемых наблюдаемым источником, определение момента времени прихода первого принятого зондирующего сигнала, измерение направления прихода зондирующего сигнала, определение изменения собственного положения приемника зондирующих сигналов, определение скорости движения приемника зондирующих сигналов, определение времени приема следующего зондирующего сигнала в новой точке местоположения приемника, измерение направления на источник зондирующего сигнала в новой точке нахождения приемника зондирующих сигналов, по измеренным пеленгам и по измеренному пройденному расстоянию определяют положение точки пересечения направлений на источник зондирующих сигналов, по двум углам и стороне определяют стороны треугольника, которые и будут равны дистанциям до источника зондирующих сигналов на моменты измерения направлений. Повторив измерения и получив новую дистанцию, можно определить скорость перемещения источника излучения, и направление движения источника зондирующих сигналов, что является характеристикой курсового угла движения источника зондирующих сигналов относительно приемника зондирующих сигналов.
Для осуществления этого способа необходимо, чтобы источник зондирующего сигнала (гидролокатор), параметры которого определяют, работал непрерывно, а это не всегда имеет место. Другим недостатком способа является необходимость сложной схемы маневрирования приемника зондирующих сигналов, которая требует много времени. За это время положение движущегося гидролокатора может существенно измениться, что приведет к ошибке определения курсового угла движения источника сигнала относительно приемника.
Задачей изобретения является упрощение процедуры определения изменения курсового угла движения источника зондирующего сигнала относительно приемника зондирующих сигналов.
Техническим результатом предлагаемого технического решения является обеспечение возможности определения величины изменения курсового угла движения источника зондирующих сигналов относительно приемника зондирующих сигналов по нескольким принятым зондирующим сигналам и их характерным особенностям.
Для достижения указанного технического результата в способ, содержащий последовательный прием зондирующих сигналов перемещающегося источника, введены дополнительные признаки, а именно: производят спектральный анализ первого, второго и n-ого принятых сигналов, в каждом из этих принятых сигналов определяют порог обнаружения, измеряют амплитуды спектральных отсчетов, превысивших порог, определяют и запоминают значения спектральных отсчета F1, F2 и Fn, имеющих максимальную амплитуду, вычисляют разности значений спектральных отсчетов F2-F1 и Fn-F1, а значение изменения курсового угла движения источника зондирующих сигналов  определяют как
определяют как  , где
, где  , если источник зондирующих сигналов приближается, или
, если источник зондирующих сигналов приближается, или  , если источник зондирующих сигналов удаляется, а при (Fn-F1)/(F2-F1)=1 считают, что курсовой угол движения не изменился или изменился незначительно.
, если источник зондирующих сигналов удаляется, а при (Fn-F1)/(F2-F1)=1 считают, что курсовой угол движения не изменился или изменился незначительно.
Поясним достижение технического результата.
Как правило, работа гидролокатора, являющегося источником зондирующего сигнала, имеет свой целью обзор пространства и обнаружение какого-либо объекта по наличию эхосигнала от него. Дальность распространения зондирующего сигнала гидролокатора существенно больше, чем дальность обнаружения отраженного эхосигнала. Поэтому зондирующий сигнал обнаруживается приемным устройством системы ОГС практически всегда при первых же сигналах излучения, вероятность пропуска такого сигнала прямого распространения чрезвычайно мала. Излучения зондирующего сигнала происходят в фиксированных точках по дистанции при движении источника (гидролокатора), через определенный интервал времени, величина которого выбирается в зависимости от шкалы работы гидролокатора и определяется частотой повторения зондирующего сигнала или скважностью излучения.
В гидроакустике, да и в радиолокации, известен «эффект Доплера», который заключается в том, что при движении источника или приемника частота излученного зондирующего сигнала отличается от частоты принятого сигнала (А.С.Колчеданцев, Гидроакустические станции. Судостроение, Л., 1982 г., с.21).
Можно записать: F2=F1+F1V/C, где F1 - частота излученного сигнала, F2 - частота принятого сигнала, V - скорость перемещения, С - скорость звука. Это справедливо в том случае, если перемещение источника происходит непосредственно в направлении приемника. Однако, в большинстве случаях перемещение происходит под углом и тогда под скоростью перемещения понимается скорость сближения или радиальная составляющая исходной скорости, которая определяется углом между направлением движения и направлением между источником и приемником. Тогда F2=F1+F1VcosQ0/C или после преобразования  и с учетом следующего зондирующего сигнала
и с учетом следующего зондирующего сигнала  . Разделим правые и левые части независимых уравнений и получим:
. Разделим правые и левые части независимых уравнений и получим:
 .
.
Частота излучения гидролокатора не известна, если бы она была известна, то можно было бы измерить курсовой угол движения гидролокатора. Поэтому определяется величина изменения курсового угла движения источника зондирующего сигнала относительно приемника и за частоту F1 принимается измеренная частота первого принятого зондирующего сигнала. Если учесть, что на первых посылках изменение угла меньше, чем на последующих, то можем положить, что оценка cosQ21 близка к 1, и тогда получим:
(Fn-F1)/(F2-F1)=cosQn1, где F1 - частота первого принятого сигнала, a Qn1 - величина изменения курсового угла за время между посылками 1 и n. Точность оценки изменения курсового угла движения источника зондирующих сигналов будет зависеть от того, насколько частота F1 отличается от исходной частоты излучения.
В реальных условиях первоначальное направление движения гидролокатора непосредственно на приемник встречается редко. Поэтому полученная по результатам вычислений оценка величины изменения курсового угла движения источника зондирующих сигналов будет отличаться от истинной величины изменения. Тем не менее, будет измерен сам факт изменения направления движения, ориентировочная величина изменения курсового угла движения гидролокатора, значение оценки которой будет улучшаться с каждой новой принятой посылкой. Если (Fn-F1) меньше чем (F2-F1), это означает, что курсовой угол движения гидролокатора по отношению к приемнику увеличивается. Если (Fn-F1) больше чем (F2-F1), то курсовой угол движения гидролокатора относительно приемника уменьшается. В этом случае для вычисления величины изменения курсового угла движения источника зондирующих сигналов необходимо взять величину, обратную полученной, и по отношению к ней определить изменение курсового угла источника зондирующих сигналов. Если (Fn-F1)=(F2-F1), это означает, что курсовой угол движения гидролокатора по отношению к приемнику практически не изменился. Как правило, частота повторений зондирующих сигналов поисковых гидролокаторов достаточно высокая. За время между излучениями гидролокатор не существенно изменит свое местоположение и поэтому на первых посылках частота изменится не существенно. Поэтому измерение частоты производится по каждой принятой посылке, оценка разности частот производится по каждому последующему сигналу, вычисление отношения каждый раз производится к первой измеренной разности частот, что с каждым принятым сигналом ведет к повышению достоверности измеренного изменения курсового угла движения.
Сущность изобретения поясняется чертежом, на котором приведена блок-схема устройства, реализующего предлагаемый способ.
Устройство содержит антенну 1, соединенную через приемное устройство 2, блок 3 спектрального анализа с первым входом блока 5 измерения значения спектрального отсчета с максимальной амплитудой. Выход блока 5 соединен с входом блока 6 памяти, первый выход которого соединен с первым входом блока 9 принятия решения. Второй выход блока 3 через блок 4 выбора порога соединен со вторым входом блока 5. Второй выход блока 6 через блок 7 вычисления разности и блок 8 вычисления значения угла изменения курса соединен со вторым входом блока 9 принятия решения.
Пример осуществления предлагаемого способа целесообразно рассмотреть совместно с описанием работы устройства, реализующего способ.
Зондирующие сигналы, принятые антенной 1, поступают на приемное устройство 2, где обнаруживаются и передаются на блок 3 спектрального анализа. Эти блоки являются известными устройствами, которые реализованы в прототипе и в системах обнаружения сигналов гидролокаторов (Ю.А.Корякин, С.А.Смирнов, Г.В.Яковлев, Корабельная гидроакустическая техника, СПб.: «Наука», 2004 г., С.89-92). С выхода блока 3 отсчеты спектра выделенного зондирующего сигнала поступают в блок 4, где производится сравнение их с порогом, после чего в блоке 5 производится определение спектрального отсчета с максимальной амплитудой. Зондирующие сигналы, принимаемые аппаратурой обнаружения гидролокационных сигналов, являются сигналами прямого распространения и поэтому обрабатываются в приемном устройстве при большом отношении сигнал помеха, поэтому проблемы выбора порога в этой ситуации нет. На выходе блока 3 отсчеты спектра могут иметь различное значение и различную амплитуду, кроме того, для решения поставленной задачи необходима селекция отсчетов по частоте и по амплитуде. Это задача решается в блоке 4, который формирует пороговый сигнал по амплитуде и пороговые границы сигнала по частоте. Выбранные отсчеты спектра поступают в блок 5 определения спектрального отсчета с максимальной амплитудой, где выбираются значения частот, амплитуда которых максимальна для принятого зондирующего сигнала. Значение этого спектрального отсчета и номер зондирующего сигнала с временем обнаружения из блока 5 передаются в блок 6 памяти, где подбираются спектры по времени и по парам. Отобранные пары спектральных отсчетов поступают в блок 7 для вычисления разности и вычисления отношений измеренной разности к первой разности, которая хранится в этом же блоке. После этого происходит определение косинуса угла и определение величины изменения курсового угла движения источника зондирующих сигналов. Все эти параметры поступают в блок принятия решения 9, где отображаются и используются для формирования трассы движения гидролокатора зондирующих сигналов.
Все эти вычислительные операции, операции запоминания, выбора и сравнения могут быть проведены в спецпроцессорах, используемых для обнаружения зондирующих сигналов гидролокатора при разработке программного обеспечения (там же стр.281-295).
Таким образом, без маневрирования, только путем измерения разности спектральных отсчетов между приемами зондирующих сигналов и вычисления их отношения, а также с использованием простых математических операций над ними удается определить изменение курсового угла перемещающегося источника зондирующего сигнала и отслеживать направление его движения.
Способ измерения изменения курсового угла движения источника зондирующих сигналов, содержащий последовательный прием зондирующих сигналов перемещающегося источника, отличающийся тем, что: производят спектральный анализ первого, второго и n-ого принятых сигналов, в каждом из этих принятых сигналов определяют порог обнаружения, измеряют амплитуды спектральных отсчетов, превысивших порог, определяют и запоминают значения спектральных отсчета F, F и F, имеющих максимальную амплитуду, вычисляют разности значений спектральных отсчетов F-F и F-F, а значение изменения курсового угла движения источника зондирующих сигналов определяют как , где , если угол между приемником и источником зондирующих сигналов увеличивается, или , если угол между приемником и источником зондирующих сигналов уменьшается, а при (Fn-F)/(F-F)=1 считают, что курсовой угол движения не изменился или изменился незначительно.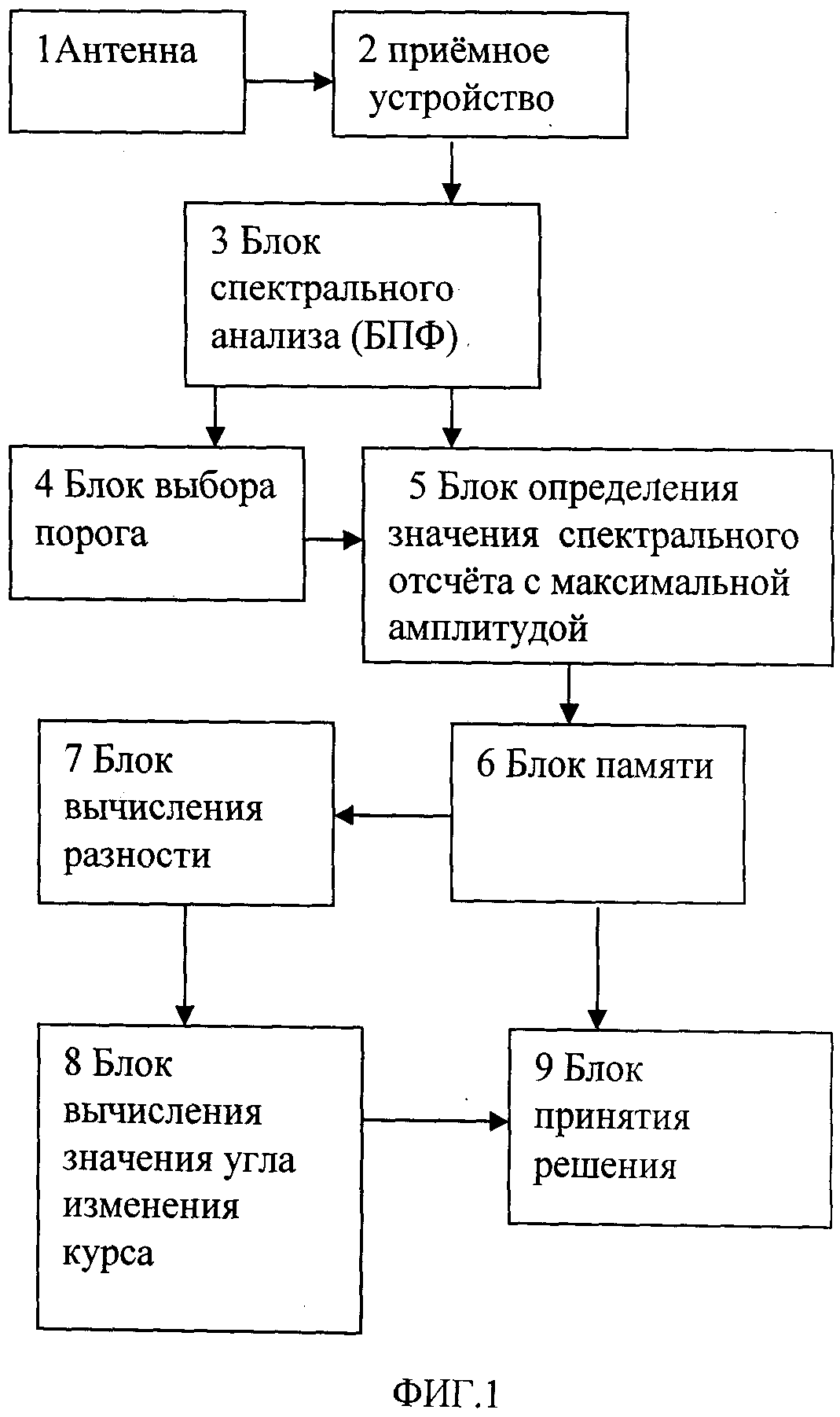

Способ обнаружения и классификации сигнала от цели
Устройство и способ постановки и выборки гибкой протяженной буксируемой антенны
Способ определения глубины погружения приводняющегося объекта
Способ возбуждения стержневого гидроакустического преобразователя
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ определения ошибки оценки дистанции гидролокатором
Способ обнаружения и классификации сигнала от цели
Устройство и способ постановки и выборки гибкой протяженной буксируемой антенны
Способ определения глубины погружения приводняющегося объекта
Способ возбуждения стержневого гидроакустического преобразователя
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ определения ошибки оценки дистанции гидролокатором

