Результат интеллектуальной деятельности: СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО КАРТЕ ВЫСОТ МЕСТНОСТИ И СИСТЕМА НАВИГАЦИИ, ИСПОЛЬЗУЮЩАЯ СПОСОБ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области навигации летательных аппаратов (ЛА), использующей на расчетном участке трассы радиолокационные измерения высот местности для определения уходов и коррекции данных инерциальной навигационной системы (ИНС) о местоположении ЛА, направлено на повышение точности определения местоположения ЛА по карте высот местности участка коррекции.
Известен способ и устройство системы навигации ЛА по рельефу местности [1], применяемые при наведении ЛА на цель, когда невозможно использование информации о положении ЛА от спутниковой системы навигации GPS. Согласно способу на участке коррекции радиовысотомером измеряются дальности и угловые положения разрешаемых элементов сцены в связанной с ЛА системой координат (ССК). Измеренная карта сцены поступает в блок сравнения с картой высот местности, на который также приходят данные навигационного процессора о угловом положении и скорости ЛА, данные баровысотомера о высоте ЛА над уровнем моря и карта высот местности из базы данных. В блоке сравнения координаты измеренного рельефа по данным навигационного процессора и баровысотомера преобразуются в нормальную систему координат (НСК). За счет пролета участка коррекции и построчного измерения рельефа в плоскости, поперечной направлению полета, формируется трехмерная карта объектов сцены с максимальной высотой. Трехмерная карта объектов сцены максимальной высоты корреляционно сравнивается с записанной в базе данных эталонной картой местности. Находится положение измеренной карты объектов сцены, где ее корреляция с эталонной картой местности максимальна, соответственно оценивается местоположение ЛА относительно центра эталонной карты и уровня моря. Данные о местоположении ЛА на выходе блока сравнения совместно с данными ИНС о скорости, местоположении и угловом положении ЛА и данными баровысотомера поступают в навигационный процессор. В навигационном процессоре совместной фильтрацией определяются погрешности координат ЛА (местоположение, скорость и угловое положение) в точке коррекции и уточняются координаты ЛА в текущем времени. Данные погрешности поступают в ИНС для коррекции данных, полученных счислением измеряемых линейных ускорений и угловых скоростей. Уточненные текущие координаты Л А выдаются в систему управления полетом Л А к цели. В качестве радиовысотомера используется интерферометрическая РЛС с несколькими базами. Применение нескольких баз обеспечивает однозначное измерение пеленга разрешаемых элементов поверхности в плоскости, ортогональной продольной оси ЛА. Две приемные и одна приемопередающая антенны находятся на крыльях ЛА. Для повышения помехозащищенности используется широкополосный сложный сигнал, несущая частота которого скачкообразно по случайному закону перестраивается во времени.
Недостатком системы является сравнительно низкая высота полета ЛА, на которой погрешность оценки местоположения ЛА, определяемая погрешностью измерения крена ИНС, меньше допустимой. Таким же образом сказывается неучтенная погрешность установки оси антенной системы относительно вертикали ЛА при измерениях пеленга объектов сцены максимальной высоты.
Известен способ и устройство [2] навигационной системы ЛА по карте высот местности, принятой в качестве прототипа, в которой интерферометрический доплеровский радиовысотомер построчно поперек линии пути измеряет координаты элементов подрадарной поверхности (дальность, пеленг, доплеровский сдвиг частоты). Пеленг измеряется относительно продольной оси ЛА. Расчетом по данным пеленга, доплеровского сдвига частоты и скорости полета ЛА определяются вторые угловые координаты элементов строк рельефа местности. По множеству измерений строк рельефа находятся координаты объектов сцены максимальной высоты и выдаются в корреляционный процессор. На вход навигационного процессора также поступает эталонная карта высот местности. По положению максимума взаимной корреляции измеренной карты объектов сцены максимальной высоты с эталонной картой местности находится отклонение местоположения ЛА от центра эталонной карты. Размер эталонной карты, ее ориентация и центр задаются процессором качества. Процессор качества учитывает ширину диаграмм направленности антенн интерферометра, данные ИНС о курсе и высоте ЛА над уровнем моря, текущие данные о местоположении ЛА, формируемые навигационным процессором. Эталонная карта высот местности участка коррекции, анализируется процессором качества (информативности), на основании этого определяются веса оценок координат ЛА, полученных корреляционным процессором и ИНС. Навигационный процессор по данным найденных весов проводит весовое суммирование координат ЛА, полученных от ИНС и корреляционного процессора, формирует скорректированные оценки координат ЛА и выдает их в систему управления полетом ЛА к цели, ИНС и процессор оценки качества карты.
Использование доплеровской фильтрации отраженного сигнала, позволяет повысить разрешение радиовысотомера по углу, соответственно точность определения местоположения ЛА. Кроме того, использование оценок качества карты позволяет оптимально комбинировать данные измерений ИНС и корреляционного процессора для получения уточненной оценки местоположения ЛА.
Предполагается, что данные измерений координат разрешаемых элементов местности, выполненные радиовысотомером, пересчитываются корреляционным процессором в НСК по данным ИНС о углах крена, тангажа и рысканья без ошибок. Суммарный вклад погрешностей ИНС по измерению крена Δγкр и аттестации осей антенной системы Δγac равен ΔZ=Нла{(Δγкр)2+(Δγас)2}1/2, где Нла - высота полета ЛА. Значение, где ΔZ << допустимой погрешности ΔZдоп ограничивает максимум рабочей высоты навигационной системы ЛА по карте местности.
Целью предлагаемого изобретения является увеличение диапазона рабочих высот ЛА, на которых система коррекции по карте высот местности обеспечивает требуемую точность.
Заявленная цель достигается за счет:
итеративной оценки погрешности ИНС по крену по каждому измерению строки рельефа, поперечной направлению полета;
выполнения коррекции измеренного крена на текущую оценку погрешности на каждой итерации;
учета коррекции измеренного крена при преобразованиях координат строк измеренного рельефа в НСК.
Предлагаемый способ повышения точности определения местоположения ЛА по карте высот местности отличается тем, что до вычисления текущей погрешности априорных координат ЛА находят и компенсируют усредненную погрешность крена, используемого при преобразовании координат элементов измеряемой карты местности в НСК, в дальнейшем тексте называемой погрешностью измерения крена; оценка погрешности измерения крена выполняется итеративно,
каждая итерация включает получение радиолокационного изображения (РЛИ) j-той строки местности в координатах дальность - доплеровская частота, нахождение самых ярких элементов строки местности, превышающих порог обнаружения, число самых ярких элементов РЛИ выбирается в диапазоне от Q1 до Q2, нахождение высот самых ярких элементов РЛИ j-той строки в ССК, преобразования координат самых ярких элементов j-той строки из ССК в НСК с использованием априорных данных о крене, скорректированных на усредненную оценку погрешности крена текущей и предыдущих (М-1) итераций;
оценка текущей погрешности крена включает совмещение элементов j-той строки с цифровой картой высот местности с нахождением элементов цифровой карты высот местности, соответствующих элементам высоты j-той строки, расчет угла между линиями регрессии, описывающими зависимость высоты самых ярких элементов j-той строки от Z координаты НСК и соответствующих им элементов эталонной карты;
повторения итераций измерения усредненной погрешности по крену и ее компенсации до тех пор пока усредненная оценка погрешности крена не станет меньше допустимого порога.
Предлагаемый способ повышения точности определения местоположения ЛА по карте высот местности предполагает:
а) Наличие в базе данных эталонной цифровой карты высот местности hК(x,z) участка коррекции, ориентированной по заданному курсу ЛА на участке коррекции;
б) Получение от бортовых навигационных средств текущих априорных координат ЛА, включающих данные о местоположении ЛА (XИ,YИ,ZИ)Т, данные о составляющих скорости ЛА (VX,VY,VZ)T и угловой ориентации ЛА по углу рысканья ψ, тангажа θ и крена γ,
в) Радиолокационное построчное измерение в ССК радиолокационных изображений местности (РЛИ). Каждая j-тая строка местности, расположена поперек линии пути ЛА, ограничена по размеру вдоль линии пути шириной диаграммы направленности (ДН) антенны радиолокационного измерителя в плоскости YoX ССК, и поперек линии пути согласно диапазону перестройки луча ДН радиолокационного измерителя в плоскости строки, параллельной оси oZ ССК. Наклон плоскости строки менее 5 градусов относительно плоскости YoZ ССК,
г) Нахождение N самых ярких элементов j-той строки местности. Число самых ярких элементов выбирается по результатам моделирования в диапазоне от Q1 до Q2,
д) Нахождение высот самых ярких элементов РЛИ j-той строки в ССК YCnj(XCnj,ZCnj),
е) Компенсация усредненной погрешности измерения крена  в данных, используемых при преобразовании координат элементов измеренной строки рельефа в нормальную систему,
в данных, используемых при преобразовании координат элементов измеренной строки рельефа в нормальную систему,

где Yj - значение крена ЛА, соответствующее априорным данным при измерениях координат элементов j-той строки местности;
 - итерационно уточняемая усредненная оценка погрешности крена,
- итерационно уточняемая усредненная оценка погрешности крена,
ж) Преобразование координат n-тых разрешаемых элементов j-той строки местности в НСК с учетом текущих априорных координат ЛА:

MCH(ψj, θj,  ) - матрица преобразования координат элементов сцены из связанной системы в нормальную для j - той строки измеряемой местности;
) - матрица преобразования координат элементов сцены из связанной системы в нормальную для j - той строки измеряемой местности;
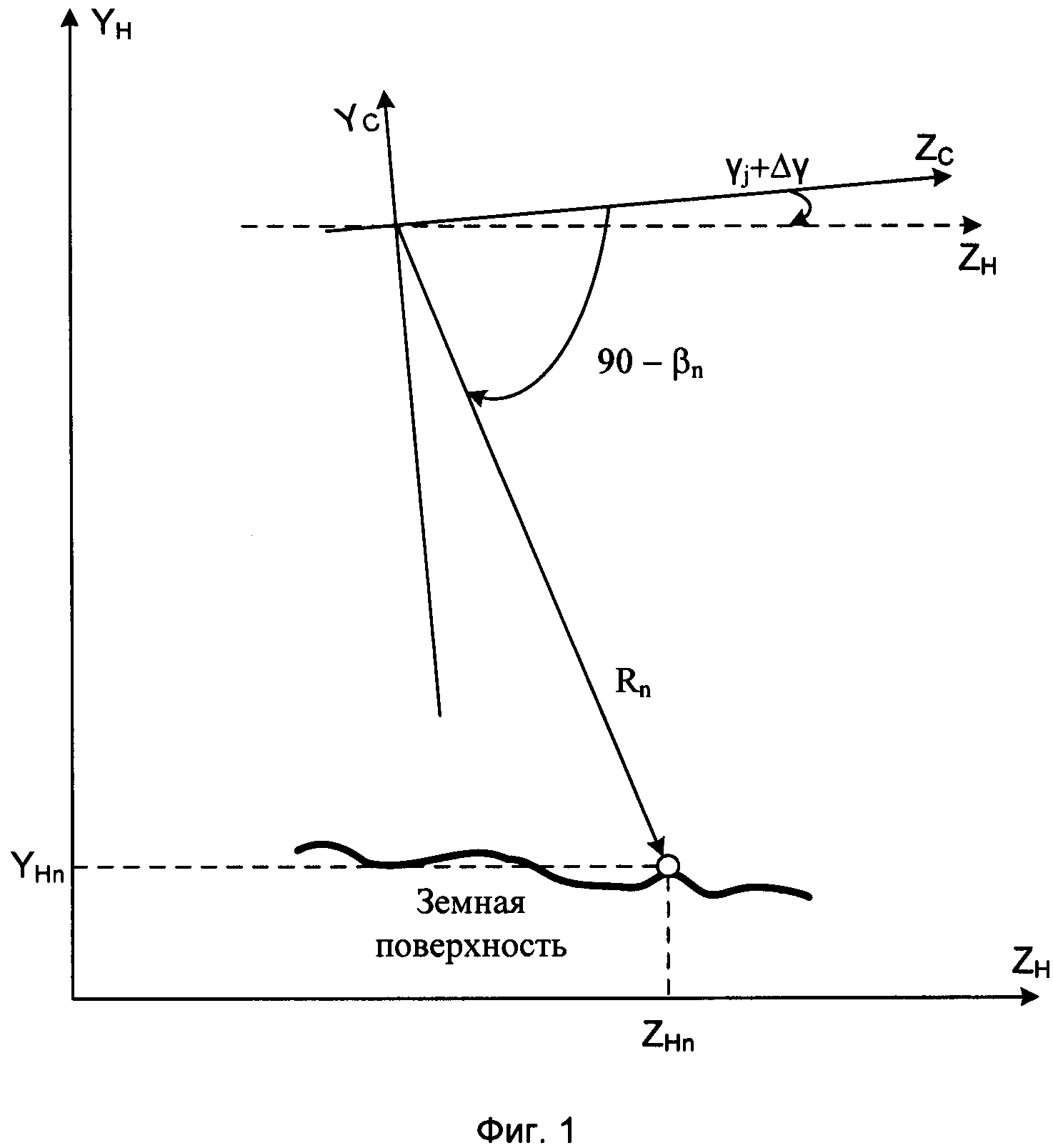
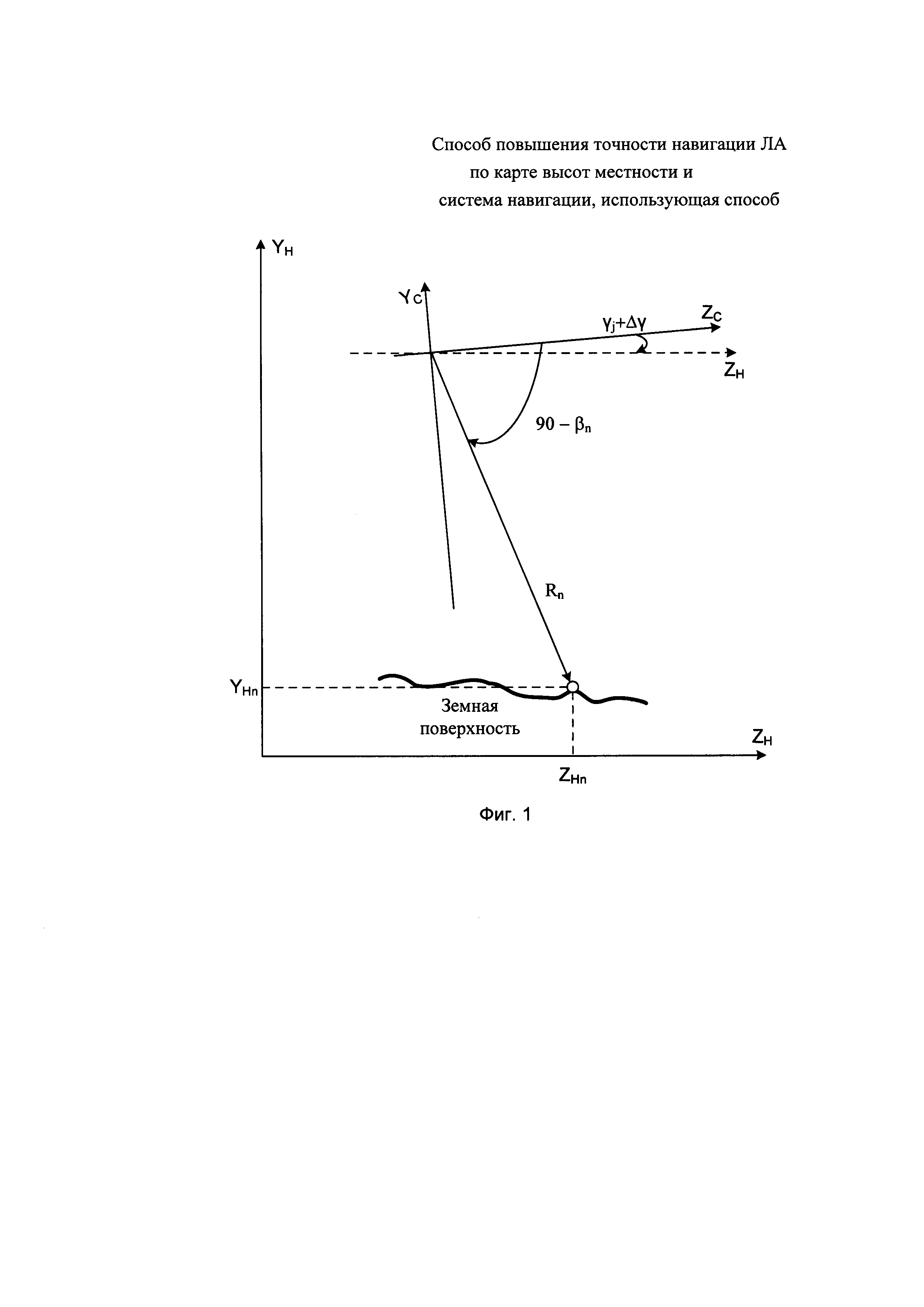
Геометрия измеряемых координат элементов сцены в ССК и НСК приведена на фиг. 1;
з) Совмещение измеренной карты высот разрешаемых элементов j-той строки YHnj(XHnj,ZHnj) с цифровой картой высот местности hК(x,z) с нахождением элементов цифровой карты YKnj(XKnj,ZKnj), соответствующих элементам измеренной строки местности YHij(XHij,ZHij),
и) Нахождение элементов строки цифровой карты YKnj(ZKnj), соответствующих элементам строки измеренного рельефа YHnj(ZHnj),  ;
;
к) Вычисление одномерной линии регрессии для j-той строки измеренного рельефа YHnj(ZHnj) и соответствующей ей строки цифровой карты высот местности YKnj(ZKnj) в соответствии с выражениями:

где

ZHj=(ZH1j, ZH2j, …, ZHNj)T - Z координаты самых ярких элементов j-той строки местности;
ZKj=(ZK1j, ZK2j, …, ZKNj)T - Z координаты элементов цифровой карты высот местности, соответствующие самым ярким элементам j-той строки местности;
yHj=(YH1j, YH2j, …, YHNj)T - высота самых ярких элементов j-той строки местности;
yKj=(YK1j, YK2j, …, YKNj)T - высота элементов цифровой карты высот, соответствующих самым ярким элементам j-той строки местности;
л) Нахождение текущей погрешности измерения крена Δγj - на j-той строке местности как угол между одномерными линиями регрессии для самых ярких элементов строки измеренного рельефа и соответствующих им элементов цифровой карты высот местности. Иллюстрация нахождения Δγj по строкам измеренного рельефа и цифровой карты высот местности приведена на фиг. 2, при этом:

где w2Hj и w2Kj - значения крутизны линии регрессии w2 измеренной j-той строки рельефа и соответствующей ей j-той строки цифровой карты;
м) Вычисление усредненной погрешности измерения крена  :
:

где 
н) Сравнение текущей оценки погрешности измерения крена Δγj с допустимым порогом, повторение измерения строк высот местности с оценкой ошибки измерения крена и коррекции значения крена, используемого при преобразовании координат элементов измеряемой сцены из ССК в НСК до тех пор, пока модуль текущей оценки погрешности измерения крена Δγj не станет меньше допустимой. При  ≤ допуска производится запоминание
≤ допуска производится запоминание  , соответствующего последней итерации;
, соответствующего последней итерации;
о) Построчное радиолокационное измерение карты высот местности требуемого размера на участке коррекции;
п) Преобразование координат элементов измеренной карты сцены в НСК (Xnj, Ynj, Znj) с использованием априорных координат о местоположении (ХИj, YИj, ZИj)T, скорости (VXj, VYj, VZj) ЛА и угловом положении ЛА по крену γj, тангажу θj и рысканью ψj, при этом вместо текущих значений крена уj используется скорректированное  значение:
значение:

где  ;
;
 - усредненная оценка погрешности измерения крена в конце итераций;
- усредненная оценка погрешности измерения крена в конце итераций;
р) Вычисление текущей погрешности априорных координат ЛА по местоположению (ΔХ, ΔY, ΔZ) путем сопоставления измеренной карты высот местности с цифровой картой высот местности в НСК.
совмещение в НСК элементов строки измеренного рельефа с эталонной цифровой картой высот местности также, как и определение сдвига измеренной карты сцены относительно эталонной цифровой карты высот местности выполняется по положению минимума суммы модулей центрированной разности измеренных высот элементов местности Ynj(Xnj, Znj) и соответствующих им высот элементов эталонной карты hК(х, z).
с) Коррекция погрешности априорных координат ЛА с учетом полученной оценки погрешности местоположения ЛА (ΔX, ΔY, ΔZ) и усредненной оценки погрешности измерения крена  .
.
Прототипом предлагаемой системы коррекции ЛА по карте высот местности взята система [2], содержащая последовательно соединенные доплеровский радиовысотомер, в дальнейшем называемый когерентным радиовысотомером, корреляционный процессор и навигационный процессор, выход которого является выходом системы коррекции по карте местности, цифровую карту местности, соединенную с четвертым входом корреляционного процессора, на второй вход навигационного процессора поступают текущие данные инерциальной системы о углах крена, тангажа, рысканья, местоположении и скорости ЛА соответственно, отличающаяся тем, что введены последовательно соединенные вычислитель линии регрессии строки измеренного рельефа, вычислитель погрешности по крену и схема управления, корректор погрешности крена, первый и второй выход которого соединены с вторым входом корреляционного процессора и третьим входом навигационного процессора соответственно; выход схемы управления соединен с третьим входом корреляционного процессора, первым входом корректора погрешности крена и входом когерентного радиовысотомера, вычислитель линии регрессии строк цифровой карты местности, выход которого соединен с первым входом вычислителя погрешности по крену, второй и третий выходы корреляционного процессора соединены с входами вычислителей линии регрессии строки измеренного рельефа и строки цифровой карты соответственно, выход вычислителя погрешности по крену соединен с вторым входом корректора погрешности крена, выход навигационного процессора соединен с третьим входом корректора погрешности крена, пятым входом корреляционного процессора и первым входом схемы управления, схема управления по априорным координатам ЛА, выдаваемым навигационным процессором, определяет момент включения когерентного радиовысотомера, синхронизирует сканирование местности когерентным радиовысотомером в соответствии с расчетной временной циклограммой, вводит на корректор погрешности крена исходную нулевую усредненную оценку погрешности крена, определяет вхождение погрешности измерения крена в допуск и вырабатывает решение остановки или продолжения итеративной оценки погрешности измерения крена, синхронизирует корректор погрешности крена по запоминанию усредненной погрешности крена, соответствующей последней итерации, синхронизирует считывание текущих данных по местоположению, скорости, углов ориентации ЛА, поступающих в корректор погрешности крена и корреляционный процессор с навигационного процессора.
Сущность предлагаемого устройства поясняется дальнейшим описанием и чертежами.
На фиг. 1 представлена геометрия связи измеряемых координат разрешаемого элемента местности в нормальной и связанной системах.
На фиг. 2 представлены строки измеренного рельефа и цифровой карты и соответствующих им одномерных линий регрессии YH(ZH) и YK(ZK) при наличии погрешности оценки крена Δγ.
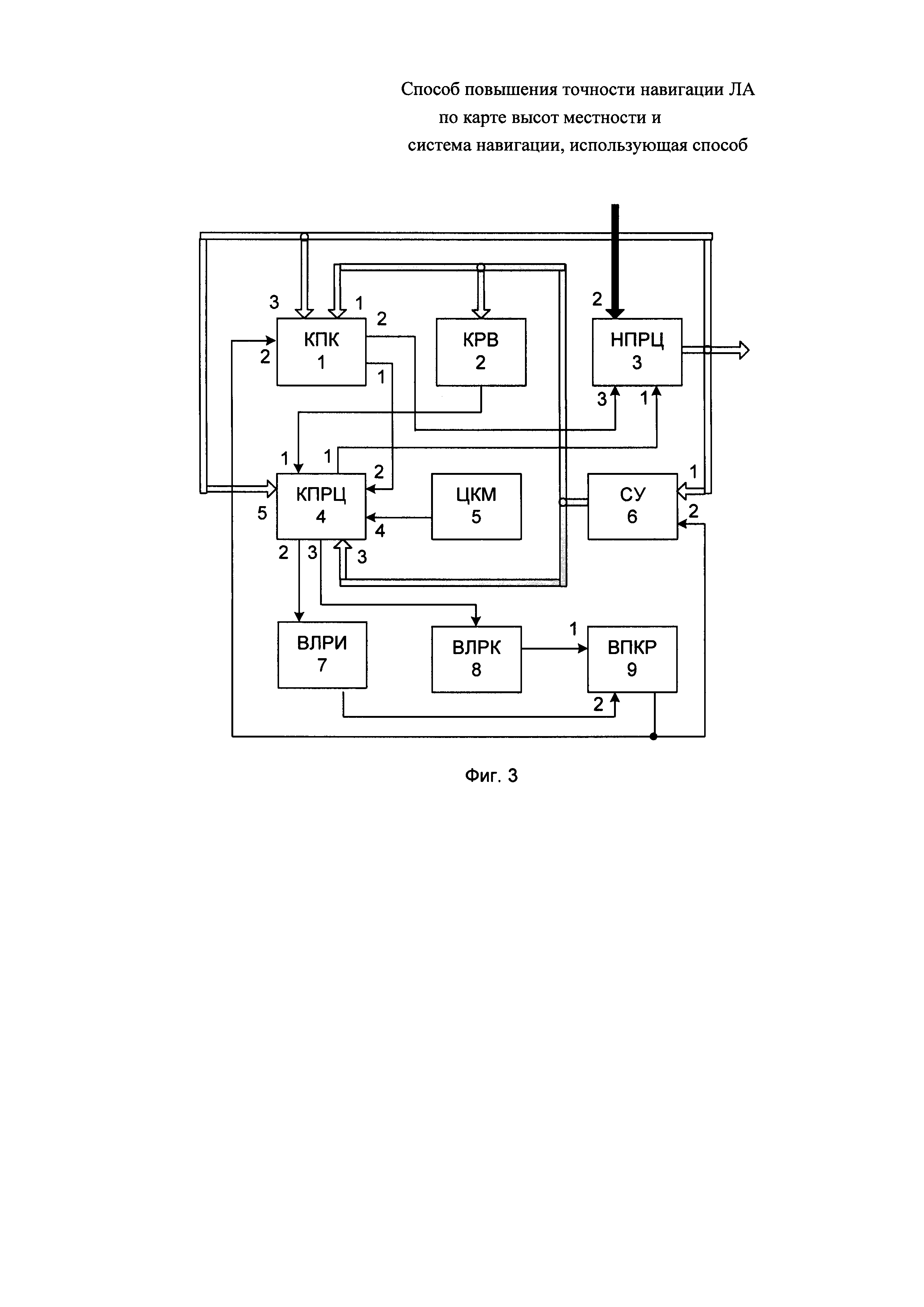
На фиг. 3 представлена структурная схема устройства системы коррекции ЛА по карте высот местности.
На фиг. 4 представлен вариант когерентного радиовысотомера - измерителя высот местности в связанной системе координат.
На фиг .3 приняты следующие обозначения:
1 - Корректор погрешности крена (КПК);
2 - Когерентный радиовысотомер (КРВ);
3 - Навигационный процессор (НПРЦ);
4 - Корреляционный процессор (КПРЦ);
5 - Цифровая карта местности (ЦКМ);
6 - Схема управления (СУ);
7 - Вычислитель линии регрессии для строки измеренного рельефа (ВЛРИ);
8 - Вычислитель линии регрессии для строки цифровой карты местности (ВЛРК);
9 - Вычислитель погрешности по крену (ВПКР).
На фиг. 3 КПРЦ 4 через последовательно соединенные ВЛРИ 7, ВПКР 9 соединен со вторым входом КПК 1, выход которого соединен со вторым входом КПРЦ 4, второй выход КПК 1 соединен с третьим входом НПРЦ 3, третий выход КПРЦ 4 через ВЛРК 8 соединен с первым входом ВПКР 9, выход которого соединен со вторым входом СУ 6, выход КРВ 2 соединен с первым входом КПРЦ 4, первый выход КПРЦ 4 соединен с первым входом НПРЦ 3, выход которого соединен с третьим входом КПК 1, пятым входом КПРЦ 4 и первым входом СУ 6, выход СУ 6 через шину управления соединен с третьим входом КПРЦ 4, первым входом КПК 1 и входом КРВ 2, выход ЦКМ 5 соединен с четвертым входом КПРЦ 4, на второй вход НПРЦ 3 от ИНС приходят текущие данные об угловом положении, скорости, местоположении ЛА, с выхода НПРЦ 3 потребителю выводятся данные скорректированных априорных координат ЛА.
На фиг. 4 приняты следующие обозначения:
10 - Первый когерентный гетеродин (КГ1);
11 - Второй когерентный гетеродин (КГ2);
12 - Синхронизатор (СНХ);
13 - Коммутатор (Ком);
14 - Первый делитель мощности (ДМ1);
15 - Второй делитель мощности (ДМ2);
16.n - Приемопередающий модуль (ППМ n);
17.n - Элемент антенной решетки (А n);
18 - Центральный процессор (ЦПР).
На фиг. 4 второй выход первого когерентного СВЧ гетеродина 10 соединяется с первым входом коммутатора 13, второй выход второго когерентного СВЧ гетеродина И соединяется со вторым входом коммутатора 13, выход которого соединен с входом первого делителя мощности 14. Второй выход синхронизатора 12 соединен с третьими входами приемопередающих модулей (ППМ) 16.n. Третий выход синхронизатора 12 соединен с входом второго делителя мощности 15, (N+1)-вый выход которого соединен с третьими входами первого и второго когерентных гетеродинов 10 и 11. Четвертый выход синхронизатора соединен с третьим входом коммутатора 13. Пятый и шестой выходы синхронизатора 12 соединены с четвертыми входами первого 10 и второго 11 когерентных гетеродинов соответственно. Первые входы ППМ 16.n соединены с одним из выходов первого делителя мощности 14, номер которого соответствует номеру ППМ. Вторые входы ППМ 16.n соединены с одним из выходов второго делителя мощности 15, номер которого соответствует номеру ППМ.
Второй вход-выход центрального процессора 18 через шину управления соединен с первыми входами-выходами первого и второго когерентных гетеродинов 10 и 11, синхронизатора 12, четвертыми входами-выходами ППМ 16.n. Третий вход центрального процессора 18 через сигнальную шину соединен с шестыми выходами всех ППМ 16.n. Пятый выход ППМ 16.n соединен с соответствующим элементом антенной решетки 17.n. Первый вход-выход центрального процессора 18 обеспечивает выдачу через шину данных измеренных когерентным радиовысотомером данных о рельефе местности, четвертый вход выход центрального процессора 18 обеспечивает прием внешних команд управления.
На фиг. 3 все составляющие реализуются на базе единой бортовой вычислительной машины и не требуют пояснения. Элементы когерентного радиовысотомера, изображенного на фиг. 4, широко используются на практике и не требуют пояснения.
В соответствии со схемами на фиг. 3 и 4 система коррекции ЛА по карте высот местности, реализующая предлагаемый способ, работает следующим образом. Управление работой системы осуществляет схема управления 6 путем выдачи на корректор погрешности крена 1, когерентный радиовысотомер 2 и корреляционный процессор 4 соответствующих команд на выходе. Навигационный процессор 3 принимает внешние данные от ИНС (углы крена γ, тангажа θ, рысканья ψ, текущие координаты (ХИ, YИ, ZИ) и составляющих скорости (VX, VY, VZ) ЛА по второму входу), оценки погрешности априорных координат ЛА (ΔX, ΔY, ΔZ), выдаваемые корреляционным процессором 4 на первом выходе, и усредненную оценку погрешности ИНС по крену в конце итераций  с второго выхода корректора погрешности крена 1. Навигационный процессор 3 формирует на выходе скорректированные текущие данные о координатах, скорости и ориентации ЛА, выдаваемые по шине данных потребителю, корректору погрешности крена 1, корреляционному процессору 4 и в схему управления 6.
с второго выхода корректора погрешности крена 1. Навигационный процессор 3 формирует на выходе скорректированные текущие данные о координатах, скорости и ориентации ЛА, выдаваемые по шине данных потребителю, корректору погрешности крена 1, корреляционному процессору 4 и в схему управления 6.
Схема управления 6 по текущим данным местоположения ЛА (XИ, YИ, ZИ), приходящим на ее первый вход, определяет момент достижения ЛА начала заданного участка коррекции, по которому
включает когерентный радиовысотомер 2,
вводит на корректор погрешности крена 1 исходную усредненную оценку погрешности крена  ,
,
включает в корреляционном процессоре 4 и корректоре погрешности крена 1 режим коррекции измерений крена,
синхронизирует когерентный радиовысотомер 2 по измерениям каждой строки местности.
При включении когерентного радиовысотомера 2 начинается радиолокационное построчное с периодом ТСК сканирование местности в плоскости, параллельной поперечной оси ЛА. Направление излучения когерентного радиовысотомера в плоскости сканирования дискретно с шагом Δβ в диапазоне углов ±i⋅Δβ перестраивается на каждом цикле сканирования, здесь i - счетчик положений луча вторичной ДН в строке измерения рельефа, дискрет перестройки направления луча ДН Δβ близок к ее ширине.
На каждом j-том сканировании когерентный радиовысотомер измеряет строку рельефа в виде координат ярких точек (дальности Rn, пеленга (βn+π/2) в плоскости, сканирования от оси Z, и и угла εn между проекцией направления на яркую точку на плоскость YoX ССК и осью oY ССК с привязкой их ко времени tij между началом j-того сканирования и приемом сигнала от n-й яркой точки поверхности. Результаты измерений параметров (Rn,βn,εn) ярких точек каждой строки с привязкой к номеру строки сканирования j и времени tij выдаются на первый вход корреляционного процессора 4.
Корреляционный процессор 4 в режиме коррекции измерений крена для каждой строки местности:
вычисляет координаты ярких точек строки рельефа в ССК по формуле:

преобразует координаты ярких точек из ССК в НСК по формуле (2) с компенсацией погрешности крена, вычисленной по формуле (7);
сопоставляет высоту ярких точек измеренной строки местности [ХHn, YHn, ZHn] с цифровой картой 5 с нахождением точек цифровой карты, соответствующих элементам измеренной строки рельефа [ХKn, YKn, ZKn];
выдает строку измеренного рельефа YHn(ZHn) и соответствующую ей строку YKn(ZKn) цифровой карты на вычислители линий регрессии 7 и 8 соответственно.
Вычислители линий регрессии 7 и 8 по выражениям (3)-(5) получают крутизны w2H и W2K линий регрессии измеренной строки рельефа и соответствующей ей строки цифровой карты. Значения w2H и w2K с выходов вычислителей линий регрессии 7 и 8 поступают на вычислитель погрешности по крену 9, где по формуле (6) оценивается текущая погрешность измерения крена Δγj, поступающая на второй вход корректора погрешности крена 1.
В корректоре погрешности крена 1 итерационно уточняется оценка усредненной погрешности крена  в соответствии с формулой (7) и компенсируется в соответствии с формулой (1). Начальное значение усредненной погрешности
в соответствии с формулой (7) и компенсируется в соответствии с формулой (1). Начальное значение усредненной погрешности  введено в корректор погрешности крена 1 командой по первому входу от схемы управления 6.
введено в корректор погрешности крена 1 командой по первому входу от схемы управления 6.
При  , большей порога допуска, итерации по формулам (1)-(7) продолжаются. Иначе схема управления 6 формирует команду, поступающую на третий вход корреляционного процессора 3 и первый вход корректора погрешности крена 1, прекращающую режим коррекции измерений крена и задающую режим конечного расчета погрешности априорных координат ЛА.
, большей порога допуска, итерации по формулам (1)-(7) продолжаются. Иначе схема управления 6 формирует команду, поступающую на третий вход корреляционного процессора 3 и первый вход корректора погрешности крена 1, прекращающую режим коррекции измерений крена и задающую режим конечного расчета погрешности априорных координат ЛА.
В этом режиме производится:
построчное радиолокационное измерение карты высот местности требуемого размера вдоль и поперек линии пути ЛА на участке коррекции;
преобразование координат элементов измеренной карты сцены в НСК (Xnj, Ynj, Znj) по формуле (8).
Корреляционный процессор 4 путем сравнения измеренного рельефа с цифровой картой находит погрешность ИНС по координатам ЛА (ΔX, ΔY, ΔZ) Навигационный процессор 3 по данным погрешности априорных координат ЛА, приходящих с первого выхода корреляционного процессора 4, усредненной погрешности крена  в конце итераций, поступающей на его третий вход, корректирует выдаваемые им текущие координаты ЛА, в том числе по местоположению, скорости и угловому положению ЛА.
в конце итераций, поступающей на его третий вход, корректирует выдаваемые им текущие координаты ЛА, в том числе по местоположению, скорости и угловому положению ЛА.
В качестве когерентного радиовысотомера 2, построчно измеряющего высоты местности, может быть использована РЛС с цифровой активной фазированной антенной решеткой (ЦАФАР) [3], изображенной на фиг. 4. Здесь первый 10 и второй 11 когерентные гетеродины, синхронизатор 12, коммутатор 13 первый 14 и второй делители мощности формируют сигналы, синхронизирующие работу приемо-передающих модулей (ППМ) 16.n. Управление первым 10, вторым 11 когерентными гетеродинами, синхронизатором 12 и ППМ 16.n производится центральным процессором 18 через второй вход-выход. В ППМ 16.n формируются зондирующие линейно частотно модулированные сигналы с малой скважностью. Амплитуда и начальная фаза зондирующих сигналов, поступающих с ППМ 16.n на элемент антенной решетки 17.n, индивидуально задаются центральным процессором 18 через четвертый вход-выход в соответствии с направлением луча и положением элемента решетки 17.n, к которому он подключен. Отраженные сигналы, принятые ППМ 16.n, после преобразования на промежуточную частоту, усиления и оцифровки поступают с шестых выходов на обработку в центральный процессор 18. Обработка включает пространственную, временную и доплеровскую фильтрацию принятых сигналов, нахождение самых ярких элементов местности и их координат.
При пространственной обработке центральный процессор 18 применяет взвешенное суммирование сигналов для формирования двух приемных диаграмм направленности, сдвинутых по углу β относительно направления сканирования ±i⋅Δβ на несколько градусов. Доплеровская фильтрация сигналов, принятых по двум приемным лучам, выполняется алгоритмом быстрого преобразования Фурье. Амплитудным моноимпульсным методом центральный процессор 18 находит пеленги и вычисляет декартовы координаты самых ярких точек:

где 




λ - длина волны зондирующего сигнала;
FДn - доплеровский сдвиг сигнала, отраженного яркой точкой.
Координаты ярких точек выдаются центральным процессором 18 через первый вход-выход на первый вход корреляционного процессора 4. Четвертый вход-выход центрального процессора 18 используется для приема команд управления от схемы управления 6.
Заявленный способ и устройство работоспособно при малых (не более 3 градусов) величинах углов ориентации ЛА.
По данным моделирования в предлагаемом устройстве максимальная погрешность априорных измерений крена снижается с 25' до 5'. Этим обеспечивается пропорциональное снижение погрешности измерения местоположения ЛА в плоскости, поперечной направлению пути ЛА. Соответственно увеличивается диапазон рабочих высот коррекции Л А по карте высот местности. Антенная система, выполненная на ЦАФАР, имеет меньшие, чем в прототипе габариты, что может быть весьма важным для ряда ЛА военного назначения.
Пользуясь сведениями, представленными в материалах заявки, предлагаемое устройство может быть изготовлено по существующей известной в радиопромышленности технологии на базе известных комплектующих изделий и использовано для увеличения диапазона рабочих высот системы коррекции по карте высот местности и повышения точности навигации ЛА.
ЛИТЕРАТУРА
1 Патент США 6512976: Method and system for terrain aided navigation.
2 Патент США 7409293: Methods and systems for enhancing accuracy of terrain aided navigation systems.
3 Заявка на получение патента России №2015145892 от 26.10.15 г. - Цифровая активная фазированная антенная решетка.
Моноимпульсная рлс миллиметрового диапазона
Цифровая активная фазированная антенная решетка
Способ измерения высоты, истинной скорости летательного аппарата и наклона вектора скорости летательного аппарата относительно горизонта, устройство бортовой радиолокационной станции, использующее способ
Устройство радиолокационной станции с непрерывным линейно-частотно-модулированным сигналом и синтезом апертуры
Малогабаритная широкополосная волноводно-рупорная антенна и конструкция антенной решетки на ее базе
Импульсно-доплеровская моноимпульсная рлс
Имитатор сигнала радиолокатора с синтезированной апертурой
Радиолокатор с непрерывным шумовым сигналом и способ расширения диапазона измеряемых дальностей в радиолокаторе с непрерывным сигналом
Моноимпульсная рлс миллиметрового диапазона
Цифровая активная фазированная антенная решетка
Способ измерения высоты, истинной скорости летательного аппарата и наклона вектора скорости летательного аппарата относительно горизонта, устройство бортовой радиолокационной станции, использующее способ
Устройство дискретного преобразования фурье
Устройство для замещения костных дефектов внутреннего мыщелка большеберцовой кости при тотальном эндопротезировании коленного сустава.
Устройство радиолокационной станции с непрерывным линейно-частотно-модулированным сигналом и синтезом апертуры

