Результат интеллектуальной деятельности: ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС
Вид РИД
Изобретение
Предлагаемое изобретение относится к радиолокации, в частности к импульсно-доплеровским моноимпульсным РЛС
Тенденцией развития современных РЛС является широкое применение сложных сигналов, параметры которых перестраиваются в широком диапазоне, в сочетании с когерентным режимом работы совместно позволяющие как снизить импульсную мощность передатчика, так и повысить помехозащищенность, улучшить селекцию сигнала цели на фоне пассивных помех.
Примером такой моноимпульсной РЛС с активной фазированной антенной решеткой (АФАР) является [1], в которой приемопередающие модули (ППМ) соединены с соответствующими излучающими элементами антенной решетки. В каждом ППМ сигнал на несущей частоте формируется в квадратурном модуляторе (квадратурном балансном смесителе) за счет смешивания квадратурного модулированного по фазе и частоте сигнала на первой промежуточной частоте с опорным стабильным гетеродинным сигналом. Данный сигнал импульсно модулируется по длительности, усиливается по мощности и излучается соответствующим элементом АФАР. Особенностью формирования квадратурного модулированного по фазе и частоте сигнала на первой промежуточной частоте является то, что он формируется методом прямого цифрового синтеза (ПЦС), где жестко цифровым способом устанавливается и частота, и начальная фаза генерируемого сигнала, начало генерации и фаза ПЦС сигнала синхронизируется каждым сигналом периода повторения. При приеме принятый ППМ сигнал через последовательно включенные циркулятор и малошумящий усилитель поступает на квадратурный балансный смеситель, где смешивается с гетеродинным, переносится на первую промежуточную частоту, далее с помощью второго балансного смесителя принятый сигнал в квадратуре переносится на вторую промежуточную частоту, оцифровывается, поступает на единый процессор, где производится пространственно-временная согласованная обработка выходных сигналов всех ППМ, доплеровская фильтрация, обнаружение, селекция цели и измерение ее координат. Особенностью формирования квадратурного опорного сигнала, приходящего на второй балансный смеситель, является, то что он формируется тем же генератором ПЦС, что и при формировании зондирующего сигнала, при этом по окончании зондирующего сигнала снимается модуляция фазы и понижается частота на величину, равную удвоенной ширине спектра зондирующего сигнала. Частота выборки аналогового сигнала на выходе второго балансного смесителя в четыре раза более второй промежуточной частоты.
Достоинством схемы является возможность формирования с помощью генератора ПЦС сложных сигналов с перестраиваемыми параметрами, обеспечивающими когерентный прием отраженного сигнала.
Недостатком схемы является то, что перестройка несущей частоты может быть выполнена в относительно узком частотном диапазоне, определяемом возможностью перестройки частоты генератора ПЦС, что снижает эффективность борьбы РЛС с прицельными шумовыми помехами.
В другой известной моноимпульсной РЛС [2], принятой в качестве прототипа, зондирующий сигнал формируется в следующей последовательности: путем ПЦС на относительно низкой частоте получают модулированный по фазе (частоте) непрерывный сигнал, который переносится на более высокую промежуточную частоту с помощью квадратурного модулятора, частота которого путем умножения частоты в целое число раз поднимается на частоту гетеродина, сигнал гетеродина используется приемником при приеме отраженного сигнала и передатчиком для получения сигнала на несущей частоте путем умножения частоты гетеродина в целое число раз до несущей. Далее в передатчике непрерывный сигнал на несущей частоте подвергается импульсной модуляции, усиливается по мощности и излучается антенной в заданном направлении. Отраженный сигнал принимается моноимпульсной антенной, проходит суммарно-разностный преобразователь с получением суммарного и разностного сигналов, поступающих в суммарный и разностные каналы приема, в каждом канале приема сигнал через последовательно соединенные малошумящий усилитель и преселектор поступает на квадратурный смеситель, на выходе которого получают квадратурный сигнал на нулевой частоте как результат биений отраженного сигнала с гармониками гетеродинного сигнала, далее квадратурные сигналы селектируются по частоте фильтрами низкой частоты, усиливаются и оцифровываются. Обработка оцифрованных сигналов (сжатие, доплеровская фильтрация, обнаружение, селекция цели и сопровождение с оценкой координат цели) производится процессором.
Достоинством схемы является возможность формирования с помощью генератора ПЦС сложных сигналов с перестраиваемыми параметрами, обеспечивающими когерентный прием.
Недостатком схемы является то, что перестройка несущей частоты может быть выполнена в относительно узком частотном диапазоне, определяемом диапазоном перестройки частоты генератора прямого цифрового синтеза, умноженным на коэффициент умножения частоты квадратурного модулятора до несущей, что при малых коэффициентах умножения может оказаться не достаточным для борьбы РЛС с прицельными шумовыми помехами.
Целью предполагаемого изобретения является повышение эффективности борьбы с прицельными шумовыми помехами за счет расширения диапазона перестройки несущей частоты
Поставленная цель реализуется тем, что как сигнал несущей частоты, так и гетеродинный сигнал формируются аналогичными схемами из периодического фазомодулированного управляемого сигнала, синхронизированного частотой повторения, формируемого генератором ПЦС, путем сдвига его на две перестраиваемые частоты, разность между которыми постоянна при всех значениях несущей частоты, умножением полученных сигналов по частоте в одинаковое число раз формируют непрерывные сигналы несущей и гетеродинной частоты соответственно. Импульсный зондирующий сигнал получают вырезкой части непрерывного сигнала несущей частоты на интервале длительности импульса модуляции, следующего с частотой периода повторения, полученный сигнал усиливают по мощности и излучают. При приеме отраженного сигнала моноимпульсной антенной системой формируют суммарные и разностные сигналы, которые после усиления и преобразования на видео частоту и оцифровки обрабатываются процессором. Совместной перестройкой первой и второй частот, синхронизирующих схемы первого и второго частотного сдвига, и частоты, формируемой генератором ЦПС, обеспечивается более широкий диапазон перестройки несущей частоты.
Для достижения поставленной цели в моноимпульсной РЛС [2], содержащей кварцевый генератор, соединенный через петлю цифровой фазовой автоподстройки частоты (ЦФАПЧ) с генератором, управляемым напряжением (ГУН), выход которого соединен с вторым входом ЦФАПЧ, последовательно соединенные синхронизатор, генератор прямого цифрового синтеза (ГПЦС), первый и второй выходы которого соединены с первым и вторым входами квадратурного векторного модулятора, первый делитель мощности, первый полосовой фильтр, последовательно соединенные первый умножитель частоты и второй полосовой фильтр, последовательно соединенные импульсный модулятор, усилитель мощности, антенный переключатель, суммарно-разностный преобразователь, антенная система, второй, третий и четвертый входы-выходы которой соединены с одноименными входами-выходами суммарно-разностного преобразователя, последовательно соединенные второй умножитель частоты и четвертый полосовой фильтр, первый и второй приемные каналы, второй и первый выходы которых соединены с пятым и шестым, третьим и четвертым входами процессора соответственно, каждый приемный канал содержит преселектор, малошумящий усилитель высокой частоты (МШУ), квадратурный балансный смеситель, видеоусилитель, второй выход синхронизатора соединен с вторым входом импульсного модулятора, процессор выполняет в каждый период повторения спектральный анализ суммарного и разностного сигналов с выходов первого и второго приемных каналов, отличающуюся тем, что введены синтезатор сетки частот, первая и вторая схема сдвига частоты сигнала, третий полосовой фильтр, вентиль, второй делитель мощности, коммутатор, в первый и второй приемные каналы введены блок подавления зеркального канала, последовательно соединенные двойной балансный смеситель и усилитель промежуточной частоты (УПЧ), при этом выход ГУН соединен с первым входом синтезатора сетки частот, первый выход которого соединен с первым входом синхронизатора, пятый выход синтезатора сетки частот соединен с третьим входом квадратурного модулятора, выход которого через вентиль соединен с входом первого делителя мощности, первый выход которого через последовательно соединенные первый полосовой фильтр, первую схему сдвига частоты соединен с входом первого умножителя частоты, второй выход первого делителя мощности через последовательно соединенные третий полосовой фильтр и вторую схему сдвига частоты соединен с входом второго умножителя частоты, третий и четвертый выход синтезатора сетки частот соединены с вторыми входами второй и первой схемы сдвига частоты соответственно, шестой выход синтезатора сетки частот соединен с первым входом генератора прямого цифрового синтеза, второй выход синтезатора сетки частот соединен через первые входы первого и второго приемных каналов с вторыми входами соответствующих квадратурных балансных смесителей, выход второго полосового фильтра соединен с первым входом импульсного модулятора, второй вход которого соединен с вторым входом усилителя мощности, выход четвертого полосового фильтра через второй делитель мощности, соединен с вторым входом двойного балансного смесителя первого приемного канала, второй выход второго делителя мощности соединен с вторым входом двойного балансного смесителя второго приемного канала, в первом и втором приемных каналах, выход преселектора через МШУ соединен с первым входом двойного балансного смесителя, второй вход-выход приемного канала соединен с третьим входом-выходом блока подавления зеркального канала и вторым входом-выходом УПЧ, выход которого соединен с первым входом квадратурного балансного смесителя, первый и второй выходы квадратурного балансного смесителя соединены с одноименными входами блока подавления зеркального канала, первый и второй дифференциальный выходы блока подавления зеркального канала соединены с одноименными входами видео усилителя, дифференциальные выходы которого являются первым и вторым выходами приемного канала, третий выход антенного переключателя через третий вход первого приемного канала соединен с входом преселектора первого приемного канала, первый и второй выход суммарно-разностного преобразователя соединены с первым и третьим входами коммутатора соответственно, выход коммутатора соединен с входом преселектора второго приемного канала, второй вход-выход процессора соединен с вторыми входами-выходами синхронизатора, синтезатора сетки частот, ГПЦС, коммутатора, первого и второго приемных каналов и пятым входом-выходом антенной системы, первый вход-выход процессора является интерфейсным входом-выходом РЛС.
Сущность изобретения поясняется дальнейшим описанием со ссылками на следующие чертежи.
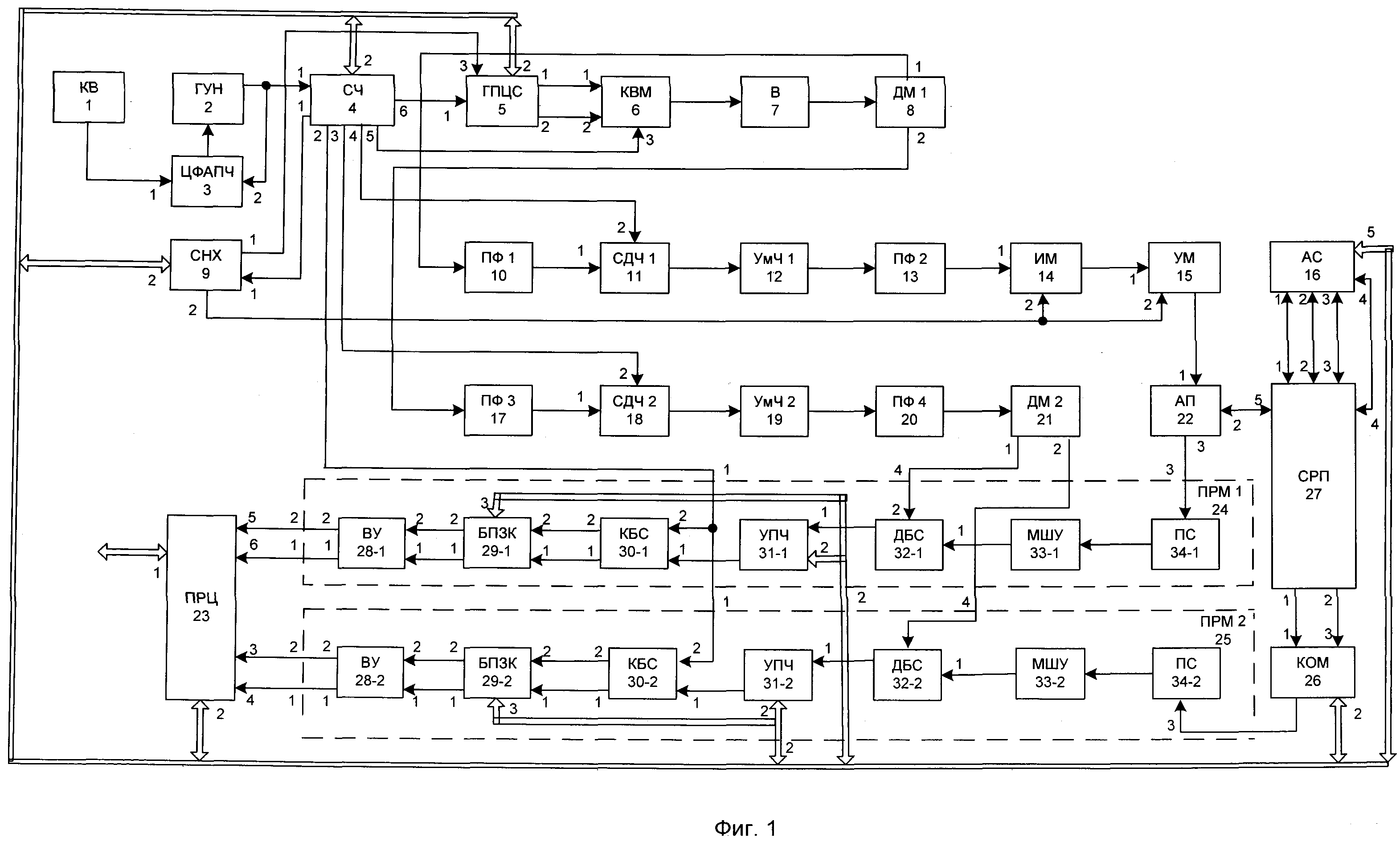
На Фиг.1 представлена структурная схема РЛС.
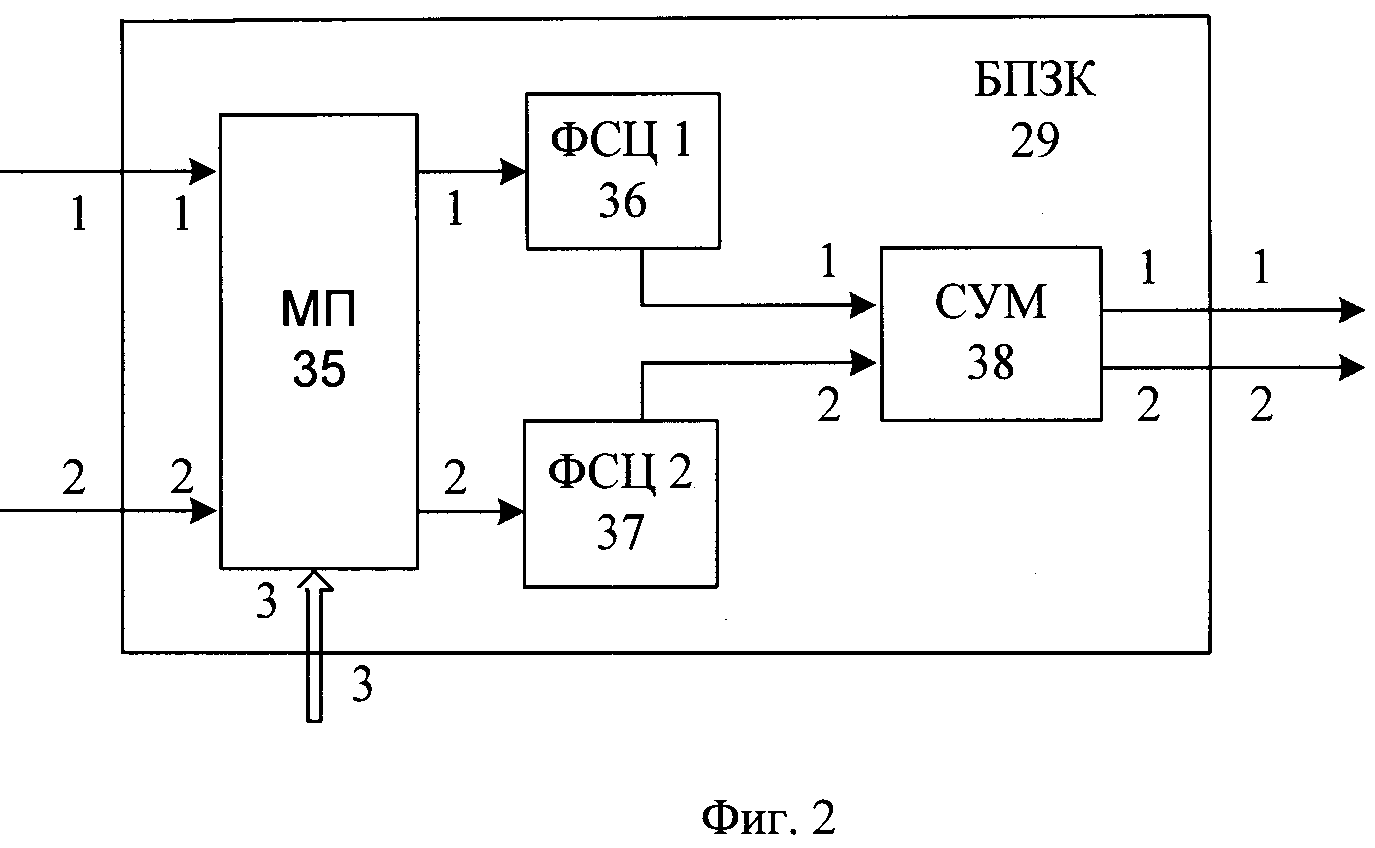
На Фиг.2 представлен блок подавления зеркального канала 29, позволяющий управляемо подавить на видео частоте сигналы с отрицательным или положительным доплеровским сдвигом.
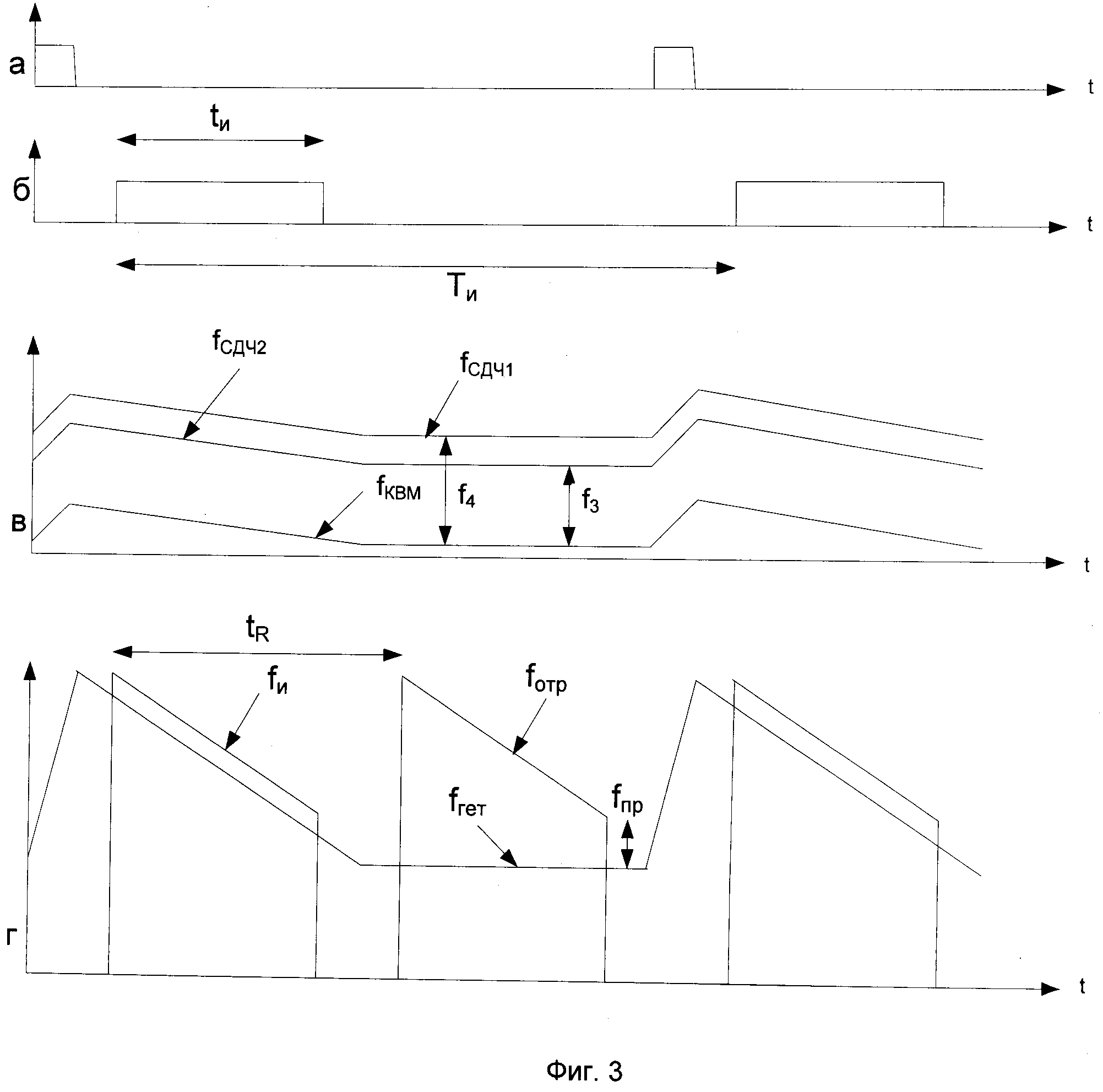
На Фиг.3 представлены эпюры, поясняющие временную связь сигналов, формируемых в РЛС.
На фиг.1 приняты следующие обозначения:
1 - Кварцевый генератор (КВ);
2 - Генератор, управляемый напряжением (ГУН);
3 - Цифровая фазовая автоподстройка частоты (ЦФАПЧ);
4 - Синтезатор сетки частот (СЧ);
5 - Генератор прямого цифрового синтеза (ГПЦС);
6 - Квадратурный модулятор (КВМ);
7 - Вентиль (В);
8 - Первый делитель мощности (ДМ 1);
9 - Синхронизатор (СНХ);
10 - Первый полосовой фильтр (ПФ 1);
11 - Первая схема сдвига частоты (СДЧ 1);
12 - Первый умножитель частоты (УмЧ 1);
13 - Второй полосовой фильтр (ПФ 2);
14 - Импульсный модулятор (ИМ);
15 - Усилитель мощности (УМ);
16 - Антенная система (АС);
17 - Третий полосовой фильтр (ПФ 3);
18 - Вторая схема сдвига частоты (СДЧ 2);
19 - Второй умножитель частоты (УмЧ 2);
20 - Четвертый полосовой фильтр (ПФ 4);
21 - Второй делитель мощности (ДМ 2);
22 - Антенный переключатель (АП);
23 - Процессор (ПРЦ);
24 - Первый приемный канал (ПРМ 1);
25 - Второй приемный канал (ПРМ 2);
26 - Коммутатор (КОМ);
27 - Суммарно-разностный преобразователь (СРП);
28 - Видео усилитель (ВУ);
29 - Блок подавления зеркального канала (БПЗК);
30 - Квадратурный балансный смеситель (КБС);
31 - Усилитель промежуточной частоты (УПЧ);
32 - Двойной балансный смеситель (ДБС);
33 - Малошумящий усилитель высокой частоты (МШУ);
34 - Преселектор (ПС).
На фиг.1 кварцевый генератор 1 через последовательно включенные петлю цифровой фазовой автоподстройкой частоты 3, ГУН 2, синтезатор сетки частот 4 соединен с первым входом ГЦПС 5, первый и второй выходы которого соединены с одноименными входами квадратурного модулятора 6, выход ГУН 2 соединен с вторым входом петли цифровой фазовой автоподстройкой частоты 3, выход квадратурного модулятора 6 через последовательно соединенные вентиль 7, первый делитель мощности 8, первый полосовой фильтр, первую схему сдвига частоты 11, первый умножитель частоты 12, второй полосовой фильтр 18, импульсный модулятор 14, усилитель мощности 15, антенный переключатель 22 соединен с пятым входом-выходом суммарно-разностного преобразователя 27, второй выход первого делителя мощности 8 через последовательно соединенные третий полосовой фильтр 17, вторую схему сдвига частоты 18, второй умножитель частоты 19, четвертый полосовой фильтр 20 соединен с входом второго делителя мощности 21, третий выход антенного переключателя 22 соединен с третьим входом первого приемного канала 24, первый и второй выходы которого соединены с шестым и пятым входами процессора 23 соответственно, первый выход суммарно-разностного преобразователя 27 через коммутатор 26 соединен с третьим входом второго приемного канала 25, первый и второй выходы которого соединены с четвертым и третьим входами процессора 23 соответственно, первый и второй выход второго делителя мощности 21 соединены с четвертыми входами первого 24 и второго 25 приемных каналов соответственно, третий вход первого 24 и второго 25 приемных каналов через последовательно соединенные преселектор 34, МШУ 33, двойной балансный смеситель 32 и УПЧ 31 соединен с первым входом квадратурного балансного смесителя 30, первый и второй выходы которого соединены с одноименными входами блока подавления зеркального канала 29, первый и второй дифференциальные выходы блока подавления зеркального канала 29 соединены с одноименными входами видео усилителя 28, первый и второй дифференциальный выходы видео усилителя 28 соединены с первым и вторым дифференциальными выходами соответствующих приемных каналов 24 и 25, второй выход синтезатора частот 4 соединен с первыми входами первого 24 и второго 25 приемных каналов, первый вход первого 24 и второго 25 приемных каналов соединен с вторым входом квадратурного балансного смесителя 30 соответствующего канала, второй вход-выход первого 24 и второго 25 приемных каналов соединен с третьим входом-выходом блока подавления зеркального канала 29 и вторым входом-выходом УПЧ 31 соответствующего канала, первый выход синтезатора сетки частот 4 соединен с первым входом синхронизатора 9, первый выход которого соединен с третьим входом ГПЦС 5, второй выход синхронизатора 9 соединен с вторыми входами импульсного модулятора 14 и усилителя мощности 15, четвертый и третий выходы синтезатора сетки частот 4 соединены с вторыми входами первой 11 и второй 18 схемы сдвига частоты соответственно, пятый выход синтезатора сетки частот 4 соединен с третьим входом квадратурного модулятора 6, второй вход-выход процессора 23 соединен с вторыми входами-выходами ГПЦС 5, синтезатора сетки частот 4, синхронизатора 9, первого 24 и второго 25 приемных каналов, коммутатора 26 и пятым входом-выходом антенной системы 16, первый, второй, третий и четвертый вход-выходы которой соединены с одноименными входами-выходами суммарно-разностного преобразователя, третий вход коммутатора 26 соединен с вторым выходом суммарно-разностного преобразователя 27, первый, второй, третий и четвертый входы-выходы суммарно-разностного преобразователя 27 соединены с одноименными входами-выходами антенной системы 16, первый вход-выход процессора 23 является интерфейсным входом-выходом РЛС.
На фиг.2 приняты следующие обозначения:
35 - Первая фазосдвигающая цепь (ФСЦ 1);
36 - Вторая фазосдвигающая цепь (ФСЦ 2);
37 - Сумматор (СУМ).
На фиг.2 первый вход блока подавления зеркального канала 29 через последовательно соединенные первую фазосдвигающую цепь 35 и сумматор 37 соединен с первым дифференциальным выходом блока подавления зеркального канала 29, второй вход блока подавления зеркального канала 29 через вторую фазосдвигающую цепь 36 соединен с вторым входом сумматора 37, второй выход которого является вторым дифференциальным выходом блока подавления зеркального канала 29.
На фиг.3 приняты следующие обозначения:
fСДЧ1 - частота сигнала на выходе первой схемы сдвига частоты,
fСДЧ2 - частота сигнала на выходе второй схемы сдвига частоты,
Ти - период повторения зондирующих импульсов,
tи - длительность зондирующего импульса,
tR - задержка отраженного сигнала,
fu - частота зондирующего сигнала,
fгет - частота гетеродина,
fотр - частота отраженного сигнала,
fпр - промежуточная частота.
В качестве синтезатора сетки частот 4 может быть использован набор цифровых делителей частоты и синтезаторов частоты с цифровой фазовой автоподстройкой частоты [3, с.33, рис 1.15].
В качестве ГПЦС 5 может быть использована микросхема AD9854 фирмы Analog Devices.
В качестве квадратурного модулятора 6 может быть использована микросхема НМС495 фирмы Hittite Microwave Corp.
В качестве синхронизатора 9 может быть использована микросхема ЕР3С55 фирмы фирмы Altera.
В качестве схем сдвига частоты 11 и 18 может быть применена микросхема HMC495LP3 фирмы Hittite Microwave Corp, построенная по принципу работы петли аналоговой фазовой автоподстройкой частоты в качестве смесителя [3, с.190, рис 4.10].
В качестве квадратурных балансных смесителей 31 может быть использована микросхема LT5516 фирмы Linean Technology.
В качестве процессора 23, выполняющего функции интерфейса, управляющего работой устройства и извлекающего из принятого отраженного сигнала навигационную информацию, может быть использована бортовая вычислительная машина ВБ-480-01.
Остальные элементы устройства широко используются в радиолокации и не требуют пояснений по реализации.
Координацию работы устройств РЛС выполняет процессор 23, передавая или принимая информацию через двунаправленную шину, соединяющую второй вход-выход процессора 23 с исполнительными устройствами. Первая часть разрядов двунаправленной шины использована для передачи адреса исполнительного устройства, вторая использована для двусторонней передачи информации, третья для управления приемом или передачей информации между процессором и исполнительными устройствами
Работа предлагаемой РЛС производится в следующей последовательности. Частота кварцевого генератора 1 с помощью ГУН 2, охваченного петлей цифровой фазовой автоподстройкой частоты 3, умножается в целое число раз и поступает на первый вход синтезатора сетки частот 4, с выходов которого снимается шесть частот: первая частота f1 снимается с первого выхода, поступает на первый вход синхронизатора 9 и используется для синхронизации формируемых им сигналов, вторая частота f2 снимается со второго выхода, поступает на вторые входы квадратурных балансных смесителей 31 приемных каналов 24 и 25 и является опорным сигналом промежуточной частоты fпр, третья частота 13 снимается с третьего выхода, поступает на второй вход второй схемы сдвига частоты 18 и является второй перестраиваемой частотой синтезатора сетки частот 4, на которую сдвигается сигнал на первом входе второй схемы сдвига частоты 18, четвертая частота f4 снимается с четвертого выхода, поступает на первую схему сдвига частоты 11 и является первой перестраиваемой частотой синтезатора сетки частот 4, на которую сдвигается частота на первом входе первой схемы сдвига частоты 11, пятая частота t5 снимается с пятого выхода, поступает на третий вход квадратурного модулятора 6 и является модулируемой частотой, шестая частота f6 снимается с шестого выхода, поступает на первый вход ГПЦС 5 и используется для синхронизации работы ГПЦС 5 на интервале между импульсами запуска ГЦПС, поступающими на его третий вход с синхронизатора 9. Соотношения между частотами на выходах синтезатора сетки частот 4 обеспечивают когерентный прием отраженного сигнала и описываются выражениями:
f6=kf1,
f2=N(f4-f3)=fпр,
где k - целое число,
N - целое число, соответствующее коэффициенту умножения частот в умножителях 12 и 19,
fпр - промежуточная частота приемных каналов 24 и 25.
Перед началом боевой работы процессор 23 получает от потребителя на первом входе-выходе исходную информацию о скорости носителя V, априорной дальности R и угловом положении сцены (ФААЗ, ФАУМ), в соответствии с которой по таблицам соответствия, записанным в память, определяются данные о периоде повторения и длительности зондирующего сигнала для настройки синхронизатора 9, крутизне перестройки частоты или кода фазовой внутриимпульсной модуляции для ГПЦС 5, параметрах настройки первого 24 и второго 25 канала приема. В частности, в первом 24 и втором 25 приемном канале в зависимости от дальности R выставляется усиление УПЧ 31, от параметров модуляции зондирующего сигнала - знак подавляемой доплеровской частоты в блоке подавления зеркального канала 29. Перечисленная информация последовательно выводится с второго входа-выхода процессора 23 через двунаправленную шину на соответствующие вторые входы-выходы синхронизатора 9, ГЦПС 5, блоков подавления зеркального канала 29 и УПЧ 31. Дополнительно процессор 23 с второго входа-выхода через двунаправленную шину вводит:
- начальные перестраиваемые значения частот f3 и f4 в синтезатор частот 4, определяющие начальную несущую частоту зондирующего сигнала,
- сигнал управления коммутатором 26 на подключение азимутального (угломестного) разностного сигнала с второго (первого) выхода суммарно-разностного преобразователя 27 к входу второго приемного канала 25.
Априорные данные о угловом положении сцены по азимуту и углу места (ФААЗ, ФАУМ) используются процессором 23 для совмещения положения оси антенной системы 16 (центра сектора сканирования при поиске цели) с априорно известным положением сцены. При этом процессор 23 через второй вход-выход и двунаправленную шину запрашивает антенную систему 16 о угловом положении оси визирования, сравнивает с априорными данными о угловом положении сцены, формирует сигнал ошибки, определяющий скорость перестройки углового положения оси антенной системы к требуемому положению, и выдает его текущее значение на антенную систему 16 по той же двунаправленной шине.
В соответствии с данными о периоде и длительности зондирующего сигнала синхронизатор 9 формирует импульс запуска ГПЦС 5 на первом выходе (фиг.3а) и импульс модуляции длительности зондирующего импульса длительностью tи (фиг.3б), следующий на импульсный модулятор 14 и усилитель мощности 15 с расчетным периодом повторения Ти. Импульс запуска ГПЦС опережает импульс модуляции на время переходного процесса в ГПЦС 5, который формирует на низкой частоте квадратурный аналоговый сигнал с расчетной фазовой модуляцией, соответствующей либо фазоманипулированному, либо частотно модулированному сигналу. Непрерывный квадратурный сигнал ГПЦС 5 поступает на квадратурный модулятор 6, где смещается по частоте на частоту f5, приходящую на его третий вход от синтезатора сетки частот 4. Пример временной зависимости частоты сигнала на выходе квадратурного модулятора 6 от времени приведен на фиг.3в, где выходной частотно-модулированный сигнал обозначен fКВМ. Полученный сигнал после прохождения вентиля 7 делится по мощности в первом делителе мощности 8, при этом сигнал с первого выхода делителя мощности 8 после фильтрации в первом полосовом фильтре 10, сдвигается по частоте первой схемой сдвига частоты 11 на первую перестраиваемую частоту f4, приходящую на второй вход схемы с синтезатора сетки частот 4. Зависимость частоты на выходе первой схемы сдвига частоты 11 (фиг.3в) описывается выражением:
fСДЧ1(t)=fКВМ(t)+f4.
Далее производится умножение частоты сигнала fСДЧ1(t) в целое число N раз в первом умножителе частоты 12 и фильтрация полученного сигнала во втором полосовом фильтре 13. Выходная частота сигнала после умножения соответствует несущей частоте, равной NfСДЧ1.
После проведения предварительных настроек узлов РЛС начинается боевая работа, при этом непрерывный сигнал несущей частоты модулируется импульсом модуляции длительности зондирующего импульса, приходящего на второй вход импульсного модулятора 14 с синхронизатора 9, полученный импульсный сигнал усиливается по мощности в стробируемом усилителе мощности 15. Стробирование производится импульсом модуляции длительности, приходящим на второй вход усилителя мощности 15. Временная зависимость внутриимпульсной модуляции выходного сигнала fИ на выходе усилителя мощности 15 приведена на фиг.3г. Выходной сигнал усилителя мощности 15 проходит через антенный переключатель 22 и суммарно-разностный преобразователь 27 на антенную систему 16, где излучается в направлении, заданном положением антенной системы 16.
Гетеродинный сигнал fГЕТ формируется аналогично непрерывному сигналу несущей частоты преобразованием частоты сигнала fКВМ на втором выходе первого делителя мощности 8 последовательно включенными третьим полосовым фильтром 17, второй схемой сдвига частоты 18, вторым умножителем частоты 19 и четвертым полосовым фильтром 20. Зависимость гетеродинной частоты от времени (фиг.3г) описывается выражением:
fГЕТ(t)=NfСДЧ2(t)=N(fКВМ(t)+f3),
где fСДЧ2 - частота сигнала на выходе второй схемы сдвига частоты 18,
f3 - вторая перестраиваемая частота синтезатора сетки частот 4, поступающая на второй вход второй схемы сдвига частоты 18.
Первый этап боевой работы связан с обнаружением заградительных помех, перестройкой несущей частоты в область частот, свободных от помех, получением суммарно-разностных сигналов сцены в координатах дальность - доплеровская частота. При этом антенная система 16 под действием управляющего сигнала процессора 23 сканирует в известном угловом секторе по азимуту ФСАЗ=ФААЗ±DФАЗ и углу места фСУМ=ФАУМ±DФУМ относительно выставленного центра сканирования (ФААЗ, ФАУМ). Сканирование производится заданием угловых скоростей ωАЗ и ωУМ антенной системе 16 процессором 23 через второй вход-выход и двунаправленную шину с последующим запросом текущих координат оси антенной системы 16, сравнением их с границами сектора сканирования. Угловые скорости ωАЗ и ωУМ антенной системы 16 зависят от направления сканирования, близости оси визирования к заданному угловому положению и границам сектора.
Отраженный сигнал fОТР (фиг.3г), задержанный относительно зондирующего на время tR, поступает через антенную систему 16 на суммарно-разностный преобразователь 27, формирующий на пятом входе-выходе суммарный сигнал, на первом и втором выходах разностные азимутальные и угломестные сигналы соответственно. Суммарный сигнал с пятого входа-выхода суммарно-разностного преобразователя 27 через антенный переключатель 22 поступает на первый приемный канал 24. Один из разностных сигналов суммарно-разностного преобразователя 27 через коммутатор 26, управляемый процессором 23, поступает на второй приемный канал 25. В каждом из приемных каналов 24 и 25 отраженный сигнал с третьего входа поступает через преселектор 34 и МШУ 33 на двойной балансный смеситель 32, где смешивается с гетеродинным сигналом, приходящим с полосового фильтра 20 через второй делитель мощности 21 на его второй вход. Отраженный сигнал на промежуточной частоте fПР усиливается в УПЧ 31, поступает на квадратурный балансный смеситель 30, где с помощью опорного сигнала промежуточной частоты, приходящего на второй вход с синтезатора сетки частот 4, переносится на видеочастоту с получением квадратур, которые поступают на блок подавления зеркального канала 29 (фиг.2), в котором по сигналу управления, приходящему на третий вход-выход от процессора 23, подавляются сигналы либо с отрицательной, либо с положительной доплеровской частотой. Дифференциальный сигнал на выходе блока подавления зеркального канала 29 выводятся на дифференциальные входы видеоусилителя 28, где усиливается, и поступает через первый и второй дифференциальный выход приемного канала на обработку в процессор 23.
В каждом периоде повторения процессор 23 производит оцифровку квадратур суммарных и разностных сигналов, приходящих на его третий и четвертый, пятый и шестой входы соответственно. В режиме поиска оцифрованные суммарные  и разностные
и разностные  сигналы каждого периода повторения
сигналы каждого периода повторения  с выходов первого 24 и второго 25 приемных каналов в процессоре 23 последовательно подвергаются:
с выходов первого 24 и второго 25 приемных каналов в процессоре 23 последовательно подвергаются:
- согласованной фильтрации, включающей получение спектра принятого сигнала в каждом периоде повторения с помощью алгоритма быстрого преобразования Фурье (БПФ), перемножения с комплексно сопряженным априорно известном спектром зондирующего сигнала S(m) и обратное преобразование Фурье (ОБПФ) спектра сжатого сигнала во временную область с получением временных разверток суммарного и разностного сигналов по дальности  и
и  , где i - индекс выборки сигнала по дальности,
, где i - индекс выборки сигнала по дальности,
- спектральному анализу сигнала на каждой i - той дальности с помощью алгоритма БПФ на интервале N периодов повторения с получением суммарных  , и разностных
, и разностных  сигналов сцены в координатах дальность-частота (i, j),
сигналов сцены в координатах дальность-частота (i, j),
- вычислению мощности сигнала в каждой (i, j) - той ячейке сцены  ,
,
- пороговому обнаружению заградительных шумовых помех в шумовом окне дальностей, ограниченном по дальности интервалом, где априорно отсутствует отраженный сигнал (i0≤i≤iН), и границами доплеровского диапазона частот отраженного сигнала сцены (jH≤j≤jB). При этом  .
.
При обнаружении заградительной шумовой помехи (ПШ=1) процессор 23 через второй вход-выход и двунаправленную шину производит перестройку несущей частоты зондирующего сигнала либо через изменение частот f3 и
формируемых синтезатором частот 16, либо частоты ГЦПС 5, либо совместно перестройкой частот синтезатора частоты 16 и ГЦПС 5. Для каждой новой несущей частоты процессор 23 производит анализ мощности сигнала Рij добиваясь получения ПШ=0,
- получение данных о суммарном
и разностном
сигнале в секторе сканирования с привязкой к угловому положению оси визирования (ФАЗ, ФУМ) при ПШ=0,
- пороговое обнаружение сигналов цели в окне, ограниченном интервалом (iН≤i≤iB), и границами доплеровского диапазона частот отраженного сигнала сцены (jH≤i≤jB). При этом  ,
,
- селекцию сигналов цели от сигналов фона по выполнению двух условий: Пij=1 и ΔFi<порог 3, где ΔFi - ширина спектра сигнала на i - той дальности,
- оценка угловых пеленгов целей сцены  относительно от оси визирования (ФАЗ, ФУМ) по пеленгационным табличным зависимостям:
относительно от оси визирования (ФАЗ, ФУМ) по пеленгационным табличным зависимостям:
 и
и  ,
,
где  ;
;
 ;
;
 и
и  - разностные сигналы по азимуту и углу места, полученные при соответствующих управляющих сигналах на втором входе коммутатора 26 от процессора 23,
- разностные сигналы по азимуту и углу места, полученные при соответствующих управляющих сигналах на втором входе коммутатора 26 от процессора 23,
- оценка угловых координат целей сцены  с учетом положения оси визирования (ФАЗ, ФУМ), при которых они обнаружены:
с учетом положения оси визирования (ФАЗ, ФУМ), при которых они обнаружены:  и
и  ,
,
- выбор одной из обнаруженных целей в качестве приоритетной, захват и сопровождение ее координат (iц, jц,  ,
,  ). При слежении сигнал ошибки по углу выдается процессором 23 через двунаправленную шину на антенную систему 16, которая отрабатывает его в сторону устранения рассогласования направления антенной системы от направления на цель,
). При слежении сигнал ошибки по углу выдается процессором 23 через двунаправленную шину на антенную систему 16, которая отрабатывает его в сторону устранения рассогласования направления антенной системы от направления на цель,
- оценка и выдача координат сопровождаемой цели потребителю через первый интерфейсный вход-выход.
В качестве схем сдвига частоты 11 и 18, используемых в устройстве для перестройки в широком диапазоне несущей частоты зондирующего сигнала и формирования гетеродинного сигнала, используется аналоговая петля фазовой автоподстройкой частоты в режиме смесителя [3, с.190, рис.4.10], позволяющая получить требуемую спектральную чистоту сдвинутого по частоте сигнала и его мощность для последующего умножения.
Вариант блока подавления зеркального канала 29, осуществляющего управляемое подавление сигналов либо с положительной, либо с отрицательной доплеровской частотой приведен на фиг.2. Входной квадратурный сигнал приходит на первый и второй входы мультиплексора 35, где по управляющему сигналу на третьем входе-выходе квадратурные составляющие сигнала на выходе могут меняться местами. Сигналы квадратур с выхода мультиплексора 35 поступают через первую 36 и вторую 37 фазосдвигающие цепи на сумматор 38, выход которого является выходом блока подавления зеркального канала 29. Первая и вторая фазосдвигающие цепи 36 и 37 выполнены на базе схем с равномерной амплитудно-частотной характеристикой, фазочастотные характеристики которых во всем диапазоне частот имеют относительный сдвиг 90 град. [4, с.51, рис.2]. Сумматор выполнен на базе операционного усилителя с дифференциальным выходом.
Техническим преимуществом предлагаемой РЛС по сравнению с прототипом является расширение диапазона перестройки несущей частоты сигнала, обеспечивающее повышение эффективности борьбы РЛС с прицельными шумовыми помехами с сохранением преимуществ, связанных с возможностью перестройки параметров внутри импульсной модуляции зондирующего сигнала в широком диапазоне и когерентного приема.
Пользуясь сведениями, представленными в материалах заявки, устройство может быть изготовлено по существующей, известной в радиопромышленности технологии, на базе известных комплектующих изделий и использовано в моноимпульсных импульсно-доплеровских РЛС для навигации летательных аппаратов.
ЛИТЕРАТУРА
1 Патент США №6441783 от 27.08.02 "Circuit module for a phased array".
2 Патент США №7002511 от 21.02.06 "Multimeter wave radar system".
3 В.Манасевич. Синтезаторы частот (Теория и проектирование): Пер. с англ./ Под ред. А.С.Галина. М.: Связь. 1979.
4 Квадратурная схема на операционных усилителях. М.: Электроника, 1975 г., №17 (с.50, 51).
Малогабаритная широкополосная волноводно-рупорная антенна и конструкция антенной решетки на ее базе
Однополосный модулятор
Корреляционный измеритель высоты и составляющих вектора путевой скорости
Импульсно-доплеровская радиовысотомерная система
Имитатор сигнала радиолокатора с синтезированной апертурой
Широкополосная антенная система
Приемопередающее устройство
Импульсно-фазовая радиовысотомерная система
Радиолокатор с непрерывным шумовым сигналом и способ расширения диапазона измеряемых дальностей в радиолокаторе с непрерывным сигналом
Моноимпульсная рлс миллиметрового диапазона
Малогабаритная широкополосная волноводно-рупорная антенна и конструкция антенной решетки на ее базе
Однополосный модулятор
Корреляционный измеритель высоты и составляющих вектора путевой скорости
Импульсно-доплеровская радиовысотомерная система
Имитатор сигнала радиолокатора с синтезированной апертурой
Широкополосная антенная система
Приемопередающее устройство
Импульсно-фазовая радиовысотомерная система
Радиолокатор с непрерывным шумовым сигналом и способ расширения диапазона измеряемых дальностей в радиолокаторе с непрерывным сигналом
Моноимпульсная рлс миллиметрового диапазона

