Результат интеллектуальной деятельности: СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ С ПОМОЩЬЮ КОМБИНИРОВАННОГО ПРИЕМНИКА
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано в системах шумопеленгования.
Известен способ обнаружения шумящих объектов, изложенный в монографии Л. Кампа (Подводная акустика, пер. с англ. Мир, 1972, С. 262-263), в соответствии с которым с помощью антенны и энергетического приемника сигнала можно обнаружить цель в пассивном режиме путем сравнения отношения сигнал/помеха в зоне акустической освещенности с пороговым значением. Этот способ обнаружения содержит следующие операции:
- прием гидроакустического шумового сигнала звукового давления с помощью приемной антенны с развитой апертурой в горизонтальной плоскости, причем антенна не обеспечивает разрешения по углу прихода в вертикальной плоскости траекторий лучей,
- частотно-временную обработку принятых шумовых сигналов звукового давления для каждого пространственного канала наблюдения в горизонтальной плоскости,
- измерение уровня на выходе пространственного канала веера, включая накопление во времени, центрирование и нормирование в единицах сигнал/помеха,
- развертывание на последовательных циклах обзора принятых шумовых сигналов звукового давления пространственных каналов веера в горизонтальной плоскости на панорамном индикаторе в координатах угол-время.
Недостатком данного способа является малая помехоустойчивость и дальность действия приемной системы при ее работе на низких частотах в мелком море, когда ее размеры становятся соизмеримыми с длиной волны.
Известен также способ обнаружения шумящих в море объектов в фиксированном частотном диапазоне (патент РФ №2298203, МПК G01S 3/80, G01S 15/04, опубликован 27.04.2007 г.), включающий прием шумового сигнала звукового давления в горизонтальной плоскости, при котором осуществляют частотно-временную обработку принятых шумовых сигналов звукового давления для каждого пространственного канала наблюдения в горизонтальной плоскости, квадрируют, усредняют по времени, центрируют и нормируют шумовые сигналы звукового давления к помехе, осуществляют накопление на последовательных циклах обзора принятых нормированных шумовых сигналов звукового давления и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал-помеха, при этом осуществляют прием шумового сигнала звукового давления статическим вертикальным веером одновременно в нескольких направлениях вертикальной плоскости каждого пространственного канала наблюдения в составе статического веера в горизонтальной плоскости, оптимизируют прием каждым горизонтальным пространственным каналом путем выбора наиболее вероятных углов приема в вертикальной плоскости для существующих гидроакустических условий подводного наблюдения. Для этого измеряют волнение поверхности моря, измеряют скорость звука в воде в зависимости от глубины, рассчитывают в каждом вертикальном пространственном канале уровень шумового сигнала на различных расстояниях и глубинах от точки приема по измеренным данным и по известным характеристикам дна, решая уравнение гидроакустики в пассивном режиме для шумящего объекта с заданным уровнем шумоизлучения с учетом характеристик приемной системы, рассчитывают уровень шумов моря в каждом вертикальном пространственном канале с учетом характеристик приемной системы по измеренным данным и известным характеристикам дна. Затем нормируют относительно расчетных шумов моря в вертикальных пространственных каналах расчетные уровни шумовых сигналов в каждом пространственном канале, полученные для заданных расстояний до шумящего объекта и глубин, рассчитывают для каждого расстояния и глубины шумящего объекта в вертикальных пространственных каналах отношение сигнал-помеха. После чего осуществляют обработку принимаемых шумовых сигналов звукового давления с весами, пропорциональными расчетному отношению сигнал-помеха в вертикальных пространственных каналах, перед накоплением на последовательных циклах обзора, и суммируют с расчетными весами принятые нормированные к помехе шумовые сигналы звукового давления вертикальных пространственных каналов. Для реализации данного способа введены новые операции, а именно:
- прием шумовых сигналов звукового давления статическим вертикальным веером одновременно в нескольких направлениях вертикальной плоскости каждого пространственного канала наблюдения в составе веера горизонтальной плоскости,
- оптимизация приема для каждого горизонтального пространственного канала в наклоненных по вертикали веерах путем выбора наиболее вероятных углов приема в существующих гидроакустических условиях наблюдения, для чего осуществляют:
- измерение скорости звука в воде в зависимости от глубины,
- измерение волнения поверхности моря,
- вычисление в каждом вертикально наклоненном пространственном канале уровня шумового сигнала звукового давления на различных расстояниях и глубинах от точки приема по измеренным данным и по известным характеристикам дна,
- вычисление уровня звукового давления для шумов моря в каждом вертикальном пространственном канале с учетом характеристик приемной системы по измеренным данным и по известным характеристикам дна,
- нормирование относительно расчетных шумов моря соответствующих вертикальных пространственных каналов расчетных уровней шумовых сигналов звукового давления в каждом пространственном канале, полученных для заданных расстояний до шумящего объекта и глубин, вычисление для каждого расстояния и глубины шумящего объекта в вертикальных пространственных каналах отношения сигнал-помеха,
- обработку принимаемых шумовых сигналов звукового давления с весами, пропорциональными расчетному отношению сигнал-помеха в вертикальных каналах, до межциклового накопления,
- суммирование с расчетными весами принятых нормированных к помехе шумовых сигналов звукового давления вертикальных пространственных каналов,
- регистрация картины совокупности принимаемых сигналов на выходе приемной системы для которых выполнены указанные выше процедуры.
Данный способ является наиболее близким к заявленному изобретению и принят за прототип.
Недостатком данного способа является малая помехоустойчивость и малая дальность действия приемной системы при работе на низких частотах, когда размер приемной системы соизмерим с длиной волны, и при работе в мелком море, когда алгоритмы формирования пространственной направленности становятся неэффективными из-за дисперсионных искажений сигналов.
Задачей заявляемого способа является повышение помехоустойчивости и дальности действия приемной системы на низких частотах в условиях мелкого моря путем использования приемной системы, которая обладает направленностью в условиях мелкого моря на любых сколь угодно низких частотах.
Для решения поставленной задачи в способе обнаружения шумящих в море объектов в фиксированном частотном диапазоне, включающем прием шумового сигнала звукового давления приемной системой статическим веером в горизонтальной плоскости, прием шумового сигнала звукового давления статическим вертикальным веером одновременно в нескольких направлениях в вертикальной плоскости, при котором осуществляют частотно-временную обработку принятых шумовых сигналов звукового давления для каждого пространственного канала наблюдения в горизонтальной плоскости и для каждого пространственного канала наблюдения в вертикальной плоскости, квадрируют, усредняют по времени, центрируют и нормируют шумовые сигналы звукового давления к помехе, осуществляют накопление на последовательных циклах обзора принятых нормированных шумовых сигналов звукового давления и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал/помеха, используют в качестве приемной системы комбинированный приемник, содержащий, кроме приемника звукового давления, трехкомпонентный приемник вектора колебательной скорости, и вводят новые операции, а именно:
- формируют методами частотно-временной обработки сигналов набор частотных каналов в заданном фиксированном частотном диапазоне в векторных каналах комбинированного приемника,
- вычисляют в каждом частотном канале комплексные амплитуды трех компонент вектора колебательной скорости, трех компонент вещественной составляющей вектора интенсивности и вертикальной компоненты мнимой составляющей вектора интенсивности в локальной системе координат, связанной с комбинированным приемником, для суммарного процесса сигнал плюс помеха,
- выделяют из текущих значений суммарного случайного процесса сигнал плюс помеха текущие значения помехи,
- вычисляют в каждом частотном канале комплексные амплитуды трех компонент вектора колебательной скорости, трех компонент вещественной составляющей вектора интенсивности и вертикальной компоненты мнимой составляющей вектора интенсивности в локальной системе координат, связанной с комбинированным приемником, для помехи,
- вычисляют в каждом частотном канале две горизонтальные компоненты вектора колебательной скорости и две горизонтальные компоненты вещественной составляющей вектора интенсивности в повернутой на 45° системе координат,
- формируют в каждом частотном канале 8-канальный статический веер характеристик направленности в горизонтальной плоскости, обладающих односторонней направленностью,
- формируют в каждом частотном канале 4-канальный статический веер характеристик направленности в вертикальной плоскости, обладающих односторонней направленностью,
- вычисляют компоненты односторонне направленного вектора интенсивности Qm (m=1-12) во всех 12-пространственных каналах для суммарного процесса сигнал плюс помеха,
- вычисляют компоненты односторонне направленного вектора интенсивности Qm (m=1-12) во всех 12-пространственных каналах для помехи,
- нормируют во всех 12-пространственных каналах компоненты односторонне направленного вектора интенсивности Qm (m=1-12), вычисленные для суммарного процесса сигнал плюс помеха, на соответствующие компоненты односторонне направленного вектора интенсивности Qm (m=1-12), вычисленные для помехи,
- вычисляют максимальное отношение сигнал/помеха в каждом из 13 каналов, 12 пространственных каналов для односторонне направленного вектора интенсивности Qm (m=1-12) и канала звукового давления,
- принимают в качестве модельной статистики поля помехи в гидрофонном канале и в каналах вектора колебательной скорости гауссову статистику,
- принимают в качестве модельной статистики поля помехи в каналах вектора интенсивности Лапласову статистику,
- вычисляют на основе принятых статистик аналитическую зависимость вероятности правильного обнаружения при заданной вероятности ложной тревоги от порогового отношения сигнал-помеха по методу максимального правдоподобия,
- принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал/помеха максимального отношения сигнал/помеха, вычисленного в одном из 13 каналов, 12 пространственных каналов для односторонне направленного вектора интенсивности Qm (m=1-12) и канала звукового давления.
В заявляемом способе существенными признаками, общими с прототипом, являются следующие операции:
- прием шумовых сигналов звукового давления приемной системой со сформированным статическим веером в горизонтальной плоскости и статическим веером в вертикальной плоскости,
- частотно-временная обработка в фиксированном частотном диапазоне принятых шумовых сигналов звукового давления для каждого пространственного канала наблюдения в горизонтальной и вертикальной плоскостях,
- измерение уровня суммарного процесса шумовой сигнал плюс помеха на выходе пространственных каналов веера, включая накопление во времени.
- измерение уровня звукового давления для помехи на выходе пространственных каналов веера, включая накопление во времени,
- центрирование и нормирование шумовых сигналов звукового давления в единицах сигнал-помеха в каждом пространственном канале веера.
Отличительными существенными признаками заявляемого способа являются следующие операции:
- используют в качестве приемной системы комбинированный приемник, содержащий, кроме приемника звукового давления, трехкомпонентный приемник вектора колебательной скорости,
- вычисляют в каждом частотном канале фиксированного частотного диапазона комплексные амплитуды трех компонент вектора колебательной скорости, трех компонент вещественной составляющей вектора интенсивности и вертикальную компоненту мнимой составляющей вектора интенсивности в локальной системе координат, связанной с комбинированным приемником, для суммарного процесса сигнал плюс помеха,
- выделяют из текущих значений суммарного случайного процесса сигнал плюс помеха текущие значения помехи,
- вычисляют в каждом частотном канале фиксированного частотного диапазона комплексные амплитуды трех компонент вектора колебательной скорости, трех компонент вещественной составляющей вектора интенсивности и вертикальную компоненту мнимой составляющей вектора интенсивности в локальной системе координат, связанной с комбинированным приемником, для помехи,
- вычисляют в каждом частотном канале две горизонтальные компоненты вектора колебательной скорости и две горизонтальные компоненты вещественной составляющей вектора интенсивности в повернутой на 45° системе координат для суммарного процесса сигнал плюс помеха и для помехи,
- формируют в каждом частотном канале 8-канальный статический веер характеристик направленности в горизонтальной плоскости, обладающих односторонней направленностью,
- формируют в каждом частотном канале 4-канальный статический веер характеристик направленности в вертикальной плоскости, обладающих односторонней направленностью,
- вычисляют компоненты односторонне направленного вектора интенсивности Qm (m=1-12) во всех 12-пространственных каналах для суммарного процесса сигнал плюс помеха,
- вычисляют компоненты односторонне направленного вектора интенсивности Qm (m=1-12) во всех 12-пространственных каналах для помехи,
- нормируют во всех 12-пространственных каналах компоненты односторонне направленного вектора интенсивности Qm (m=1-12), вычисленные для суммарного процесса сигнал плюс помеха, на соответствующие компоненты односторонне направленного вектора интенсивности Qm (m=1-12), вычисленные для помехи,
- вычисляют максимальное отношение сигнал/помеха в одном из 13 каналов, 12 пространственных каналов для односторонне направленного вектора интенсивности Qm (m=1-12) и канале звукового давления,
- принимают в качестве модельной статистики поля помехи в гидрофоном канале и в каналах вектора колебательной скорости гауссову статистику,
- принимают в качестве модельной статистики поля помехи в каналах вектора интенсивности лапласову статистику,
- вычисляют на основе принятых статистик аналитическую зависимость вероятности правильного обнаружения при заданной вероятности ложной тревоги от порогового отношения сигнал-помеха по методу максимального правдоподобия,
- принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал/помеха максимального отношения сигнал/помеха, вычисленного в одном из 13 каналов, 12 пространственных каналов для односторонне направленного вектора интенсивности Qm (m=1-12) и канале звукового давления.
Таким образом, именно такая совокупность существенных признаков заявленного способа позволяет сформировать пространственные каналы в горизонтальной и вертикальной плоскостях, направленность которых не зависит от частоты, повысить помехоустойчивость и дальность действия приемной системы.
Новизна предлагаемого способа заключается в том, что в нем с использованием комбинированного приемника и смешанных алгоритмов аддитивно-мультипликативной обработки сигналов сформированы 8 пространственных каналов в горизонтальной плоскости и 4 пространственных канала в вертикальной плоскости, направленные свойства которых не зависят от частоты.
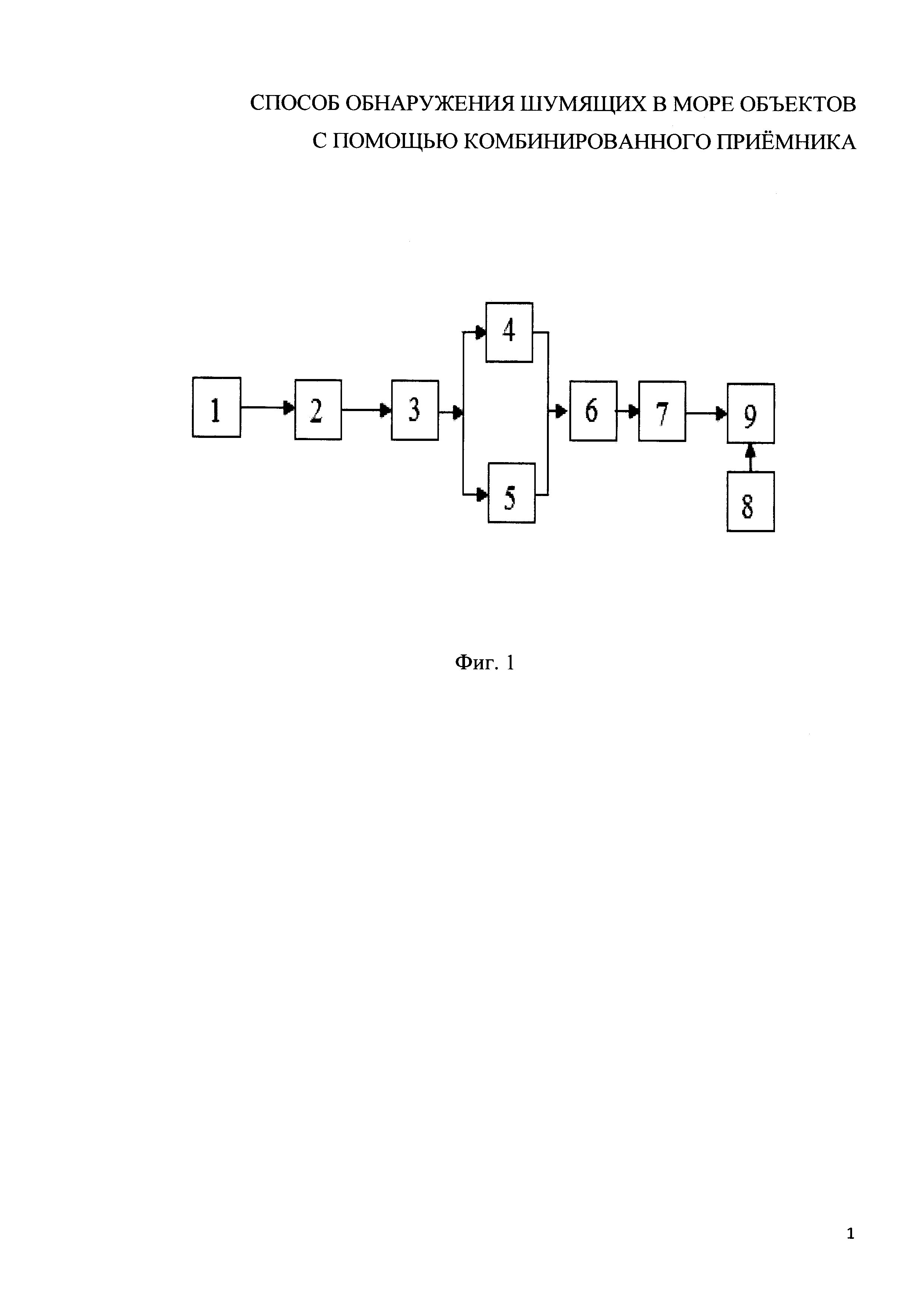
Заявленный способ обнаружения поясняется блок-схемой, приведенной на фиг. 1, на которой приняты следующие обозначения:
1 - комбинированный приемник,
2 - анализатор спектра суммарного процесса сигнал плюс помеха (S+N),
3 - блок выделения шумовой помехи (N),
4 - блок формирования набора М информативных параметров для суммарного процесса (S+N),
5 - блок формирования набора М информативных параметров для шумовой помехи (N),
6 - блок формирования отношения сигнал/помеха по каждому информативному параметру (S/N)m, m=1-M,
7 - компаратор, выбирающий информативный параметр с максимальным отношением (S/N)max,
8 - автоматический обнаружитель порогового типа, в котором устанавливается пороговое значение отношения (S/N)0,
9 - визуальный обнаружитель (планшет), формирующий сонограмму суммарного процесса в координатах частота-время наблюдения.
Заявленный способ реализуется следующей последовательностью действий.
Сигнал от шумящего объекта принимается комбинированным приемником 1, с выхода которого сигналы звукового давления и компонент вектора колебательной скорости поступают в блок 2 - анализатора спектра суммарного процесса сигнал плюс помеха (S+N). В этом блоке:
- формируют методами частотно-временной обработки сигналов набор частотных каналов в заданном фиксированном частотном диапазоне в канале давления и в векторных каналах комбинированного приемника,
- вычисляют в каждом частотном канале текущие значения комплексных амплитуд звукового давления и трех компонент вектора колебательной скорости для суммарного процесса сигнал плюс помеха (S+N).
Вычисленные в блоке 2 сигналы поступают на вход блока 3 выделения шумовой помехи (N) по алгоритму (1)

где ƒ0 - средняя частота частотного канала, Δƒ0 - варьируемый параметр, примерно на порядок превышающий ширину дискретной составляющей Δƒ в спектре суммарного процесса (сигнал плюс помеха), AS+N,  - любой из перечисленных ниже информативных параметров, вычисленный для суммарного процесса сигнал плюс помеха (S+N) и для помехи (N) соответственно.
- любой из перечисленных ниже информативных параметров, вычисленный для суммарного процесса сигнал плюс помеха (S+N) и для помехи (N) соответственно.
Сформированные в блоках 2, 3 сигналы поступают в блоки 4, 5 формирования набора информативных параметров для суммарного процесса сигнал плюс помеха и для шумовой помехи, в которых:
- вычисляют в каждом частотном канале квадраты звукового давления, трех компонент вектора колебательной скорости, трех компонент вещественной составляющей вектора интенсивности и вертикальную компоненту мнимой составляющей вектора интенсивности в локальной системе координат, связанной с комбинированным приемником, для суммарного процесса сигнал плюс помеха (S+N),
- вычисляют в каждом частотном канале квадраты звукового давления, трех компонент вектора колебательной скорости, трех компонент вещественной составляющей вектора интенсивности и вертикальную компоненту мнимой составляющей вектора интенсивности в локальной системе координат, связанной с комбинированным приемником, и для помехи (N), выделенной из суммарного процесса сигнал плюс помеха по алгоритму (1),
- вычисляют в каждом частотном канале две горизонтальные компоненты вектора колебательной скорости в повернутой на 45° системе координат для суммарного процесса сигнал плюс помеха и для помехи по формулам

где  - комплексные амплитуды спектральных составляющих на частоте ω на расстоянии r(t) для компонент вектора колебательной скорости в локальной системе координат, связанной с приемником, ϕ0 угол поворота,
- комплексные амплитуды спектральных составляющих на частоте ω на расстоянии r(t) для компонент вектора колебательной скорости в локальной системе координат, связанной с приемником, ϕ0 угол поворота,
- вычисляют компоненты вектора интенсивности Iα, Iβ в повернутой системе координат для суммарного процесса сигнал плюс помеха и для помехи по формулам

p(ω,r(t)) - комплексная амплитуда спектральной составляющей на частоте ω на расстоянии r(t) для звукового давления,
- вычисляют для суммарного процесса сигнал плюс помеха и для помехи величины

где  , μp, μν чувствительность приемника звукового давления и приемника колебательной скорости на частоте ω соответственно, Ix, Iу - горизонтальные компоненты вещественной составляющей вектора интенсивности в локальной системе координат, связанной с приемником, которым соответствует статический веер характеристик направленности в горизонтальной плоскости, обладающих односторонней направленностью, вида
, μp, μν чувствительность приемника звукового давления и приемника колебательной скорости на частоте ω соответственно, Ix, Iу - горизонтальные компоненты вещественной составляющей вектора интенсивности в локальной системе координат, связанной с приемником, которым соответствует статический веер характеристик направленности в горизонтальной плоскости, обладающих односторонней направленностью, вида
где ϕ, θ - азимутальный угол и угол места,
- вычисляют для суммарного процесса сигнал плюс помеха и для помехи величины

которым соответствует статический веер характеристик направленности в вертикальной плоскости, обладающих односторонней направленностью, вида

для вещественной составляющей вертикальной компоненты вектора интенсивности и аналогичные величины

для мнимой составляющей вертикальной компоненты вектора интенсивности,
μр - чувствительность комбинированного приемника по давлению,
μν - чувствительность комбинированного приемника по вертикальной компоненте вектора колебательной скорости,
α1, αG - заданные коэффициенты, определяемые экспериментально,
вычисляют компоненты односторонне направленного вектора интенсивности Qm (m=1-12) во всех 12-пространственных каналах для суммарного процесса сигнал плюс помеха и для помехи.
С выхода блоков 4, 5 сигналы поступают в блок 6 формирования отношения сигнал/помеха по каждому информативному параметру Qm (m=1-12) отношения (S/N)m, m=1-M, для чего нормируют во всех 12-пространственных каналах компоненты односторонне направленного вектора интенсивности Qm (m=1-12), вычисленные для суммарного процесса сигнал плюс помеха, на соответствующие компоненты односторонне направленного вектора интенсивности Qm (m=1-12), вычисленные для помехи.
Сформированные нормированные сигналы поступают на вход блока 7-компаратора, в котором вычисляют максимальное отношение сигнал/помеха в одном из 13 каналов, 12 пространственных каналов для односторонне направленного вектора интенсивности Qm (m=1-12) и канале звукового давления.
Вычисленные максимальные значения отношения сигнал/помеха сравниваются в блоке автоматического обнаружителя 8 с заданным пороговым значением отношения сигнал/помеха и отображаются в блоке 9, который представляет собой визуальный обнаружитель (планшет), формирующий сонограмму процесса обнаружения в координатах частота-время наблюдения.
По визуальному портрету сонограммы звукового поля и заданной вероятности правильного обнаружения при заданной вероятности ложной тревоги в блоке автоматического обнаружителя 8 принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал/помеха максимального отношения сигнал/помеха, вычисленного в одном из 13 информационных каналов, 12 информационных каналов для односторонне направленного вектора интенсивности Qm (m=1-12), и канала звукового давления.
Выбор порога обнаружения осуществляется аналитически по заданным функциям распределения случайных процессов (по заданной статистике), заданной вероятности правильного обнаружения при фиксированной вероятности ложных тревог. В качестве функции распределения случайных процессов в канале звукового давления и в каналах вектора колебательной скорости обычно принимается гауссова статистика. В качестве функции распределения в каналах вектора интенсивности принимается Лапласова статистика. В случае если аналитический расчет в виду сложности функций распределения затруднен, вычисление порога обнаружения и его функциональной связи с вероятностью правильного обнаружения при заданной вероятности ложной тревоги может быть выполнено методом статистического моделирования. При таком подходе для выбранной схемы обнаружения строится выборочная оценка функции распределения шумового процесса на входе порогового устройства и численно находится значение порога, требуемое для обеспечения заданной вероятности ложной тревоги. Порог вычисляется как соответствующая квантиль распределения. По найденному значению порога численно оценивается вероятность правильного обнаружения при условии, что приемник работает в условиях принятых модельных статистик сигнала и помехи. Варьируя в некоторых пределах значения порога обнаружения, вероятность ложной тревоги и вычисляя, аналитически либо численно, соответствующее значение вероятности правильного обнаружения, рассчитывают рабочие характеристики обнаружителя (РХО). По расчетным значениям РХО конкретные значения порога обнаружения вводятся в визуальный обнаружитель (планшет) и выделяется та часть шумового поля, которая лежит выше заданного порога обнаружения и которая при принятой модели обнаружения считается полезным сигналом.
Способ обнаружения шумящих в море объектов с помощью комбинированного приемника в фиксированном частотном диапазоне, включающий прием шумового сигнала звукового давления приемной системой статическим веером в горизонтальной плоскости, прием шумового сигнала звукового давления статическим вертикальным веером в вертикальной плоскости, при котором осуществляют частотно-временную обработку принятых шумовых сигналов звукового давления для каждого пространственного канала наблюдения в горизонтальной плоскости, квадрируют, усредняют по времени, центрируют и нормируют шумовые сигналы звукового давления к помехе, осуществляют накопление на последовательных циклах обзора принятых нормированных шумовых сигналов звукового давления и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал/помеха, отличающийся тем, что в качестве приемной системы используют комбинированный приемник, содержащий дополнительно к приемнику звукового давления трехкомпонентный приемник вектора колебательной скорости, вычисляют в каждом частотном канале, сформированном в результате частотно-временной обработки принятых шумовых сигналов, комплексные амплитуды трех компонент вектора колебательной скорости, трех компонент вещественной составляющей вектора интенсивности и вертикальную компоненту мнимой составляющей вектора интенсивности в локальной системе координат, связанной с комбинированным приемником, для суммарного процесса сигнал плюс помеха, выделяют из текущих значений суммарного случайного процесса сигнал плюс помеха текущие значения помехи, вычисляют в каждом частотном канале комплексные амплитуды трех компонент вектора колебательной скорости, трех компонент вещественной составляющей вектора интенсивности и вертикальную компоненту мнимой составляющей вектора интенсивности в локальной системе координат, связанной с комбинированным приемником, для помехи, вычисляют в каждом частотном канале две горизонтальные компоненты вектора колебательной скорости и две горизонтальные компоненты вектора интенсивности в повернутой на 45° системе координат для суммарного процесса сигнал плюс помеха и для помехи, формируют в каждом частотном канале 8-канальный статический веер характеристик направленности в горизонтальной плоскости, обладающих односторонней направленностью для суммарного процесса сигнал плюс помеха и для помехи, формируют в каждом частотном канале 4-канальный статический веер характеристик направленности в вертикальной плоскости, обладающих односторонней направленностью, для суммарного процесса сигнал плюс помеха и для помехи, вычисляют компоненты односторонне направленного вектора интенсивности во всех 12-пространственных каналах для суммарного процесса сигнал плюс помеха и для помехи, нормируют во всех 12-пространственных каналах компоненты односторонне направленного вектора интенсивности, вычисленные для суммарного процесса сигнал плюс помеха, на соответствующие компоненты односторонне направленного вектора интенсивности, вычисленные для помехи, вычисляют максимальное отношение сигнал/помеха в одном из 13 каналов, 12 пространственных каналов и в канале звукового давления, принимают в качестве модельной статистики поля помехи в гидрофоном канале и в каналах вектора колебательной скорости гауссову статистику, принимают в качестве модельной статистики поля помехи в каналах вектора интенсивности лапласову статистику, вычисляют на основе принятых статистик аналитическую зависимость вероятности правильного обнаружения при заданной вероятности ложной тревоги от порогового отношения сигнал-помеха по методу максимального правдоподобия и принимают решение об обнаружении путем сравнения с пороговым значением отношения сигнал/помеха максимального отношения сигнал/помеха, вычисленного в одном из 13 каналов, 12 пространственных каналов и в канале звукового давления.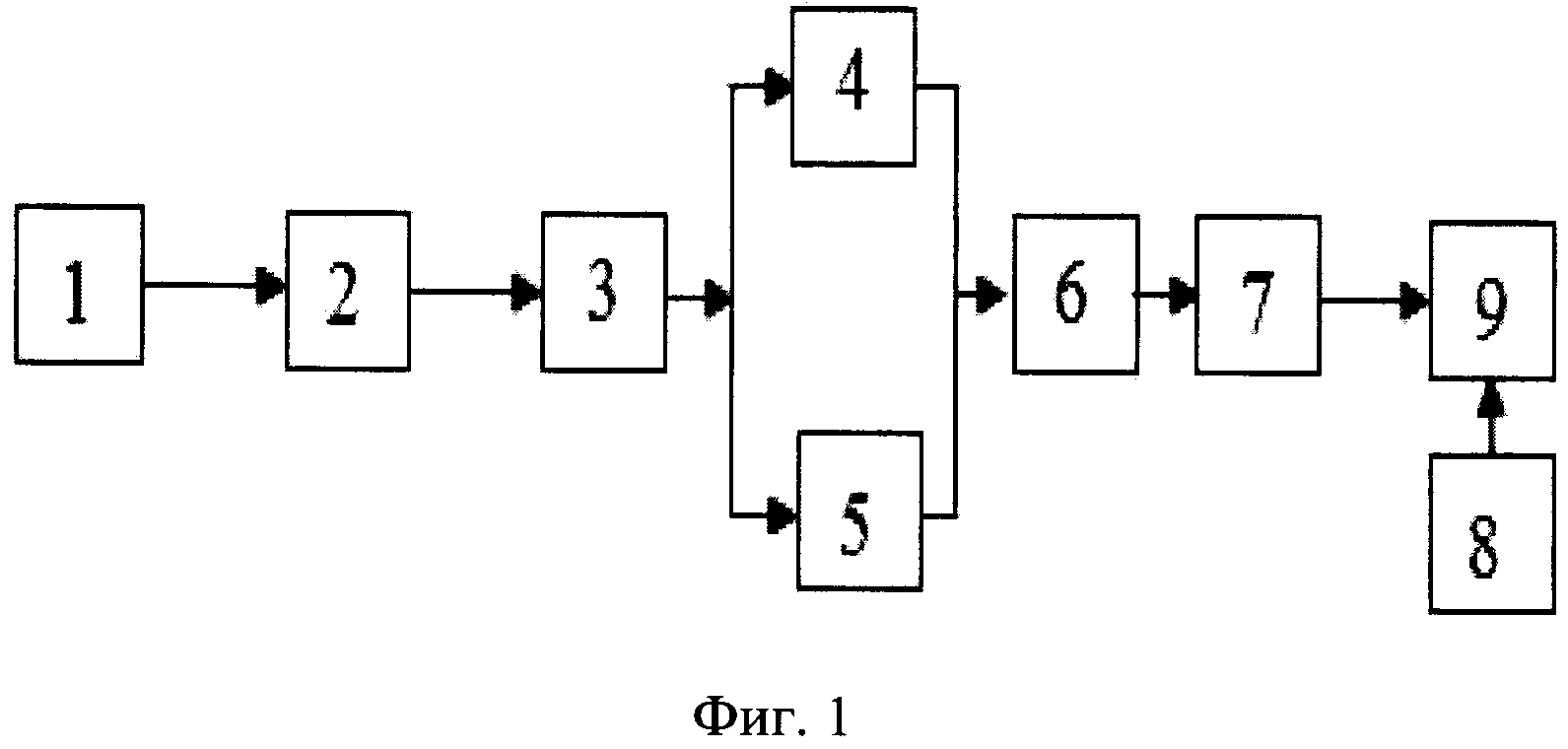
Автономный необитаемый подводный аппарат
Устройство балансировки литий-ионной аккумуляторной батареи
Способ поражения военной техники управляемыми боеприпасами
Движительный комплекс с кольцевым электродвигателем для подводных аппаратов большой автономности
Способ и устройство обнаружения шумящих в море объектов бортовой антенной
Устройство крепления и отделения малого объекта (буя) от высокоскоростного подводного объекта
Система изменения плавучести и дифферента анпа с автоматическим управлением
Скрепленный с корпусом канальный заряд смесевого ракетного твердого топлива
Способ обзора пространства гидролокатором обеспечения безопасности плавания автономного необитаемого подводного аппарата
Глубоководный анпа большого водоизмещения сверхбольшой автономности с комбинированным способом соединения модулей корпусной конструкции
Способ обнаружения шумящих объектов в мелком и глубоком море
Широкополосный гидроакустический пьезопреобразователь
Способ оценки количества лопастей винта шумящего в море объекта
Гидроакустическая глубоководная антенна
Способ классификации, определения координат и параметров движения шумящего в море объекта в инфразвуковом диапазоне частот
Гидроакустическая станция контроля подводной обстановки
Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море в инфразвуковом диапазоне частот
Система шумопеленгования гидроакустического комплекса подводной лодки
Способ обнаружения шумящих объектов в мелком море в инфразвуковом диапазоне частот
Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения пеленга на источник звука и горизонта источника звука в мелком море

