Результат интеллектуальной деятельности: Гидроакустическая станция контроля подводной обстановки
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для контроля подводной обстановки вблизи охраняемых объектов, например, буровых платформ, гидротехнических сооружений, а также для обнаружения подводных объектов, вторгающихся в охраняемую акваторию.
Известен гидроакустический комплекс для измерения азимутального угла и горизонта источника звука в мелком море (патент РФ №2476899, МПК G01S 3/80, (2006/01), H04B 11/00 (2006/01), опубликован 27.02.2013 г.), содержащий N акустических комбинированных приемников, каждый из которых состоит из гидрофона, трехкомпонентного векторного приемника и соединенных с ними усилителей, телеметрический блок, включающий делители напряжения, аналого-цифровую преобразующую схему, единую схему электронного мультиплексирования, модулятор и оптический излучатель, связанный оптической линией связи с оптическим ресивером, систему сбора, обработки и передачи информации и устройство доступа к цифровым сетям передачи данных. N акустических комбинированных приемников образуют донную вертикально ориентированную эквидистантную антенну, в которой расстояние между акустическими комбинированными приемниками равно заданной погрешности определения вертикальной координаты (горизонта) источника звука Δz, а число приемников =H/Δz (где Н-глубина моря). В систему сбора, обработки и отображения информации дополнительно введены N-канальный блок вычисления вертикальной компоненты вектора интенсивности, блок определения максимума вертикальной компоненты вектора интенсивности, N-канальный блок вычисления горизонтальных компонент вектора интенсивности, N-канальный блок вычисления азимутального угла, блок вычисления усредненного азимутального угла.
Недостатком данного комплекса является малая дальность обнаружения малошумных подводных объектов, а также невозможность определения координат и параметров движения шумящего объекта.
Известна гидроакустическая станция контроля подводной обстановки (патент РФ №2574169, МПК G01S 3/80, опубликован 10.02.2016 г.), содержащая приемно-излучающую антенну, генератор, коммутатор, через который коммутатор подключен к приемно-излучающей антенне, надводный блок обработки и визуализации и подводный кабель, генератор вместе с приемно-излучающей антенной размещены в едином подводном модуле, в который введены блок аналого-цифровых преобразователей, подключенный к коммутатору, блок управления, подключенный к блоку аналого-цифровых преобразователей, и блок интерфейса, подключенный между выходом блока управления и надводным блоком обработки и визуализации через подводный кабель, при этом в состав гидроакустической станции введена донная протяженная приемная антенна, состоящая из совокупности последовательно соединенных подводных модулей, шины данных, блока управления, интерфейса и подводного кабеля, подключенного к блоку обработки и визуализации. Использование в этом изобретении излучателя подсветки позволяет увеличить дальность обнаружения малошумных подводных объектов (целей). Для определения координат цели используется корреляционная обработка сигналов, результаты которой описываются системой уравнений




где Δτ - временная задержка отраженного от движущейся цели сигнала относительно сигнала, пришедшего по прямому лучу, с-скорость звука в воде, RИЦ -- расстояние между излучателем и целью, RПЦ - расстояние между приемником и целью,, RИП - расстояние между излучателем и приемником, α-угол, под которым цель наблюдается приемником, β - угол наклона линии,, соединяющей излучатель и приемник, относительно горизонтальной плоскости, НИ, НЦ, НП - глубина излучателя, цели и приемника соответственно, ν(НЦ) - радиальная скорость движения цели.
Недостатком данной гидроакустической станции является большая погрешность определения горизонта шумового источника и пеленга на источник из-за слабой направленности низкочастотной приемно-излучающей антенны в вертикальной и горизонтальной плоскостях и, как следствие, большая погрешность определения координат шумового источника. Кроме того, использование режима излучения демаскирует работу гидроакустической станции. Данное изобретение является наиболее близким к заявленному изобретению.
Задачей данного изобретения является уменьшение погрешности определения координат шумового источника (цели), увеличение скрытности работ и увеличение дальности обнаружения малошумных целей в режиме пассивного шумопеленгования.
Для решения данной задачи в состав гидроакустической станции контроля подводной обстановки, включающей надводный блок обработки и визуализации, подводный модуль, содержащий приемно-излучающую антенну, генератор, коммутатор, через который генератор подключен к приемно-излучающей антенне, блок аналогово-цифровых преобразователей, подключенный к коммутатору, блок управления, подключенный к блоку аналогово-цифровых преобразователей, блок интерфейса, подключенный между выходом блока управления и надводным блоком обработки и визуализации, подводный кабель, соединяющий надводный блок обработки и визуализации и подводный модуль, донную протяженную антенну, состоящую из совокупности последовательно соединенных приемных модулей, шины данных, блока управления, интерфейса и подводного кабеля, дополнительно введен береговой пост обработки и визуализации, связанный радиоканалом с обеспечивающим судном и подводным кабелем с донной протяженной антенной, а надводный блок обработки и визуализации расположен на обеспечивающем судне. Кроме того, донная протяженная антенна выполнена посредством М приемных модулей эквидистантной, вертикально ориентированной антенной, в которой расстояние между приемными модулями равно заданной погрешности определения вертикальной координаты (горизонта) источника шумового сигнала Δz, число приемников M=H/Δz (Н-глубина моря в месте установки антенны), а приемные модули снабжены акустическими комбинированными приемниками и датчиками углового положениям береговой пост обработки и визуализации включена подсистема обнаружения, пеленгования и определения горизонта источника шумового сигнала, содержащая 4М-канальный блок аналогово-цифровых преобразователей, вход которого соединен подводным кабелем с выходом интерфейса донной протяженной антенны, 4М-канальный анализатор спектра, вход которого соединен с выходом 4М-канального блока аналогово-цифровых преобразователей, М-канальный блок вычисления полного набора информативных параметров для суммарного процесса сигнал плюс помеха (S+N), вход которого соединен с выходом 4М-канального блока анализатора спектра, М-канальный блок вычисления полного набора информативных параметров для помехи N, вход которого соединен с выходом М-канального блока вычисления полного набора информативных параметров для суммарного процесса (S+N), М-канальный блок вычисления отношения сигнал-помеха (S/N) для полного набора информативных параметров, вход которого соединен с выходом М-канального блока вычисления полного набора информативных параметров для помехи N и вторым выходом М-канального блока вычисления полного набора информативных параметров для суммарного процесса (S+N), компаратор, вход которого соединен с выходом блока вычисления отношения сигнал-помеха (S/N) для полного набора информативных параметров, обнаружитель порогового типа, вход которого соединен с выходом компаратора, М-канальный блок вычисления пеленга на источник шумового сигнала, вход которого соединен с третьим выходом М-канального блока вычисления полного набора информативных параметров для суммарного процесса (S+N), М-канальный блок вычисления пеленга на приемно-излучающую антенну, вход которого соединен с четвертым выходом М-канального блока вычисления полного набора информативных параметров для суммарного процесса (S+N), блок вычисления горизонта источника шумового сигнала, вход которого соединен с пятым выходом М-канального блока вычисления полного набора информативных параметров для суммарного процесса (S+N), а также расположенные в береговом посту обработки и визуализации М-канальный блок корреляционной обработки сигналов, вход которого соединен по радиоканалу с выходом надводного блока обработки и визуализации, и блок вычисления координат и параметров движения цели, первый вход которого соединен с выходом блока корреляционной обработки сигналов, второй вход связан с выходом блока вычисления горизонта источника шумового сигнала, третий вход связан с выходом М-канального блока вычисления пеленга на источник шумового сигнала, четвертый вход связан с выходом М-канального блока вычисления пеленга на приемно-излучающую антенну.
В заявленном изобретении основным режимом работы гидроакустической станции является пассивный режим обнаружения, пеленгования и определения горизонта цели. Для этого используется М-канальная вертикально ориентированная эквидистантная приемная антенна, приемные модули которой оснащены акустическими комбинированными приемниками и датчиками углового положения модулей. Для увеличения дальности обнаружения малошумных целей в режиме пассивного шумопеленгования в заявленном изобретении с помощью акустических комбинированных приемников формируется расширенный набор информативных параметров, характеризующих звуковое поле в скалярно - векторном описании, что позволяет значительно увеличить помехоустойчивость приемной системы и, соответственно, дальность обнаружения малошумных целей в пассивном режиме.
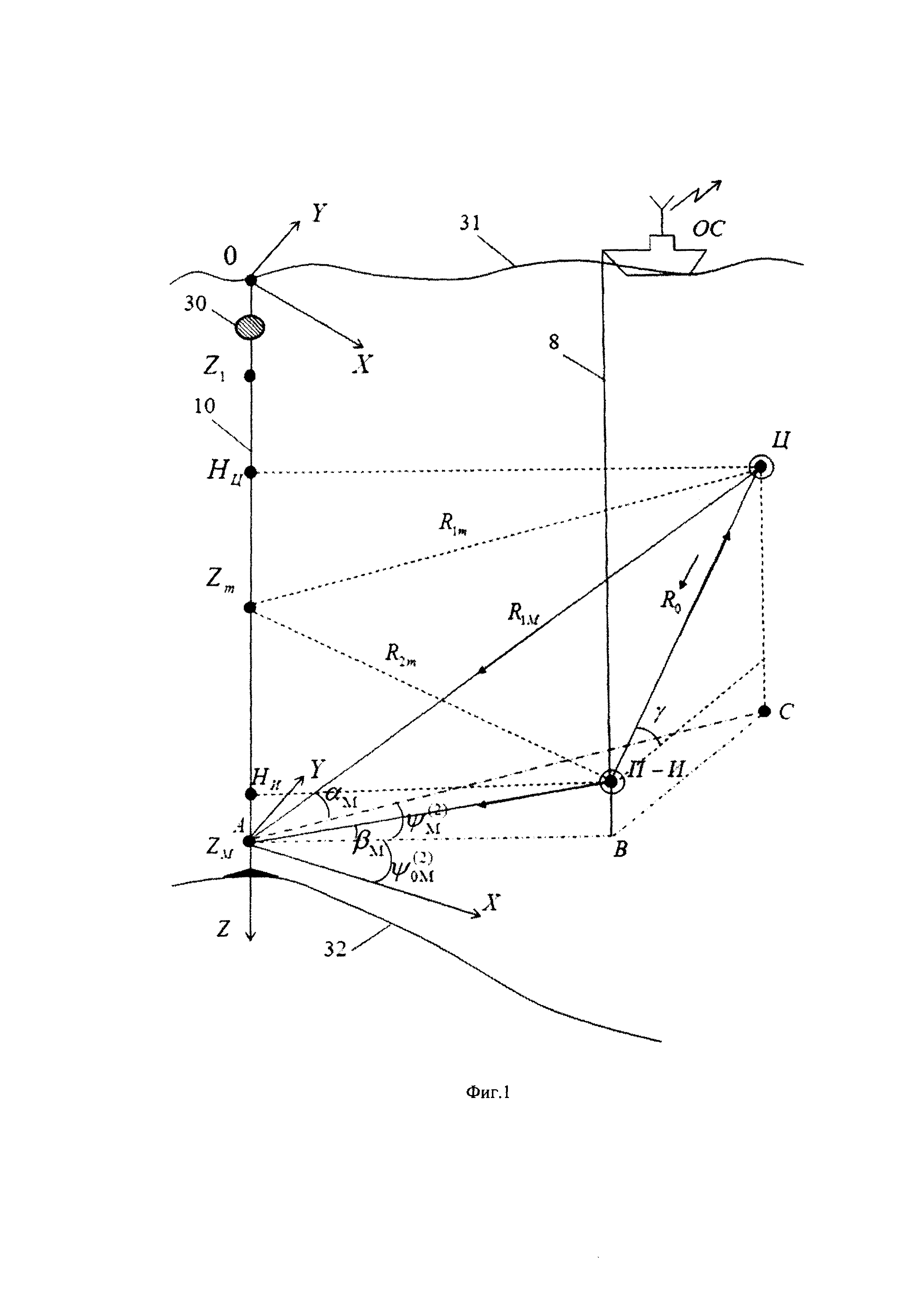
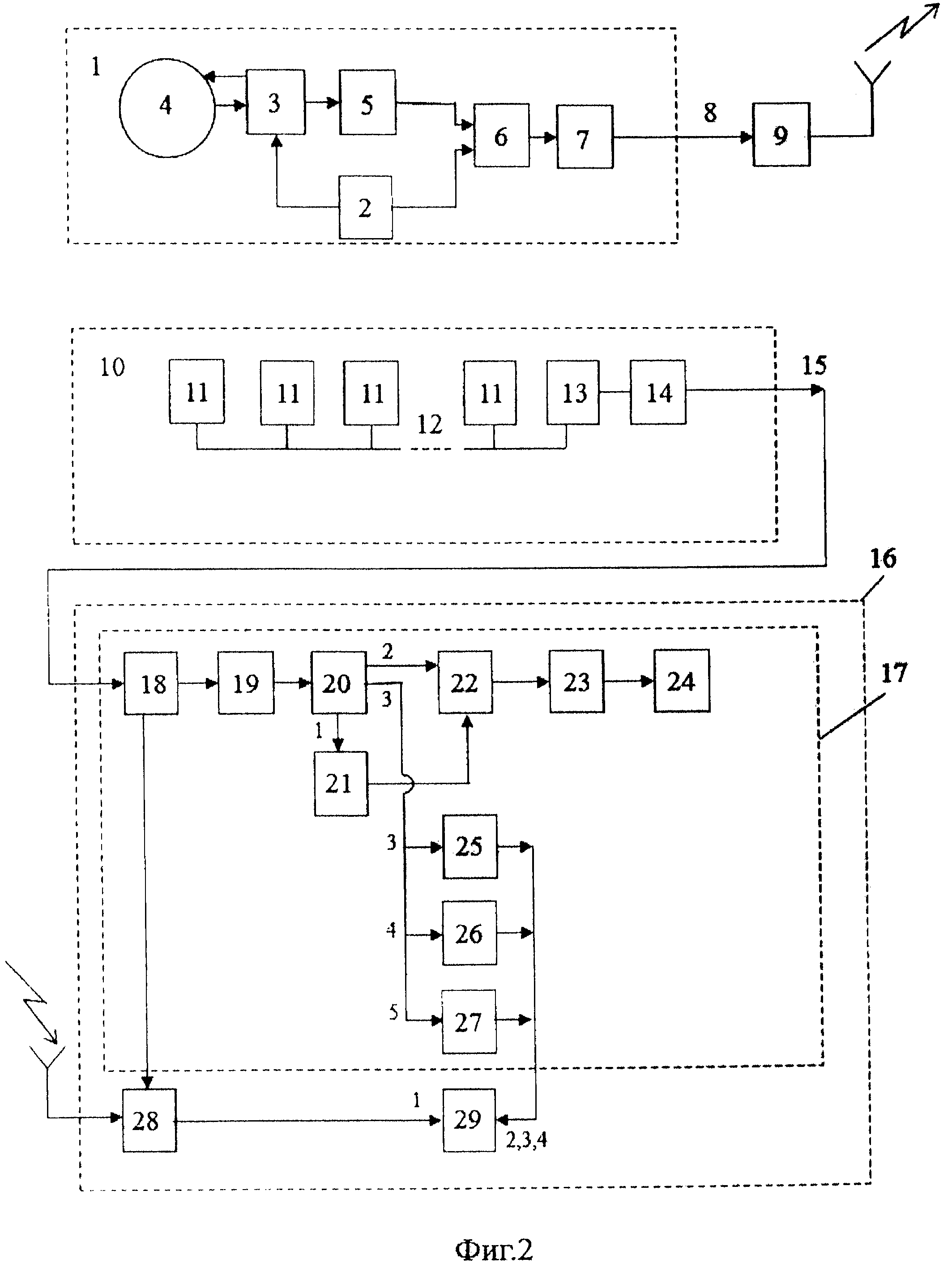
Сущность изобретения поясняется чертежами, где на фиг. 1 показана геометрия взаимного расположения цели (Ц), приемно-излучающей антенны (П-И), обеспечивающего судна (ОС) и донной М - элементной вертикально ориентированной антенны, приемные модули которой оснащены акустическими комбинированными приемниками и датчиками углового положения, штрихпунктирной линией помечена горизонтальная плоскость ABC, проходящая через придонный элемент донной протяженной антенны, относительно которой отсчитываются углы места, а именно: αМ-угол места, под которым цель наблюдается со стороны М-го комбинированного приемника, βМ-угол места, под которым излучатель наблюдается со стороны М-го комбинированного приемника, γ-угол места, под которым цель наблюдается излучателем; на фиг. 2 представлена блок-схема станции контроля подводной обстановки.
Гидроакустическая станция контроля подводной обстановки содержит в своем составе подводный модуль 1, в котором расположены генератор 2, выход которого через коммутатор 3 соединен со входом приемно-излучающей антенны 4, блок аналого-цифровых преобразователей 5, вход которого через коммутатор 3 соединен с выходом приемно-излучающей антенны 4, блок управления 6, входы которого соединены с генератором 2 и аналого-цифровым преобразователем 5, а выход через интерфейс 7 соединен со входом надводного блока 9 обработки и визуализации, расположенного на обеспечивающем судне ОС.
М-элементная донная протяженная антенна 10 содержит приемные модули 11, с выхода которых сигналы по шине 12 передаются в блок 13 управления, а через интерфейс 14 и подводный кабель 15 поступают в береговой пост 16 обработки и визуализации в подсистему 17 обнаружения, пеленгования и определения горизонта источника шумового сигнала. Подсистема 17 содержит 4М-канальный блок 18 аналого-цифровых преобразователей, вход которого соединен подводным кабелем 15 с выходом интерфейса донной протяженной антенны 10, 4М-канальный анализатор 19 спектра, вход которого соединен с выходом 4М-канального блока 18 аналого-цифровых преобразователей, М-канальный блок 20 вычисления полного набора информативных параметров для суммарного процесса (S+N), вход которого соединен с выходом 4М-канального анализатора 19 спектра, М-канальный блок 21 вычисления полного набора информативных параметров для помехи N, вход которого соединен с выходом М-канального блока 20 вычисления полного набора информативных параметров для суммарного процесса (S+N), М-канальный блок 22 вычисления отношения сигнал-помеха (S/N) для полного набора информативных параметров, вход которого соединен с выходом М-канального блока 21 вычисления полного набора информативных параметров для помехи N и вторым выходом М-канального блока 20 вычисления полного набора информативных параметров для суммарного процесса (S+N), компаратор 23, вход которого соединен с выходом блока 22 вычисления отношения сигнал-помеха (S/N) для полного набора информативных параметров, обнаружитель 24 порогового типа, вход которого соединен с выходом компаратора 23, М-канальный блок 25 вычисления пеленга на источник шумового сигнала, вход которого соединен с третьим выходом М-канального блока 20 вычисления полного набора информативных параметров для суммарного процесса (S+N), М-канальный блок 26 вычисления пеленга на приемно-излучающую антенну, вход которого соединен с четвертым выходом М-канального блока 20 вычисления полного набора информативных параметров для суммарного процесса (S+N), блок 27 вычисления горизонта источника шумового сигнала, вход которого соединен с пятым выходом М-канального блока 20 вычисления полного набора информативных параметров для суммарного процесса (S+N), а также расположенные в береговом посту обработки и визуализации М-канальный блок 28 корреляционной обработки сигналов, вход которого соединен по радиоканалу с выходом надводного блока 9 обработки и визуализации, и блок 29 вычисления координат и параметров движения цели, первый вход которого соединен с выходом блока 28 корреляционной обработки сигналов, второй вход связан с выходом блока 27 вычисления горизонта источника шумового сигнала, третий вход связан с выходом М-канального блока 25 вычисления пеленга на источник шумового сигнала, четвертый вход связан с выходом М-канального блока 26 вычисления пеленга на приемно-излучающую антенну.
На фиг. 1 дополнительно отображены: 30 - поплавок, фиксирующий донную М-элементную антенну в вертикальном положении; 31 - поверхность воды; 32 - дно
Гидроакустическая станция контроля подводной обстановки работает следующим образом. Излучаемый сигнал, формируемый в подводном модуле 1 генератором 2, через коммутатор 3 возбуждает элементы приемно-излучающей антенны 4. Отраженные сигналы принимаются элементами антенны 4 и через коммутатор 3 поступают на блок 5 аналого-цифровых преобразователей. Формирование управляющих сигналов для генератора 2 и АЦП 5, синхронизация их работы, прием оцифрованных сигналов производится блоком 6 управления, который через стандартный интерфейс 7 и подводный кабель 8 передает принятые сигналы на надводный блок 9 обработки и визуализации, расположенный на обеспечивающем судне (ОС). В то же время сигналы принимаются донной М - элементной донной протяженной антенной 10. Эти сигналы синхронно вырабатываются каждым приемным модулем 11 и по шине 12 данных собираются в блоке 13 управления. Синхронизация выборки обеспечивается этим же блоком управления, формирующим команду на выборку сигналов, передаваемой по двунаправленной шине 12 данных на каждый приемный модуль 11. Каждый приемный модуль 11 состоит из акустического комбинированного приемника, датчика углового положения модуля, аналого-цифрового преобразователя и контроллера, подключаемого к шине 12 данных. Принятые сигналы поступают через интерфейс 14 и подводный кабель 15 в береговой пост 16 обработки и визуализации в подсистему 17 обнаружения, пеленгования и определения горизонта источника шумового сигнала. Сигналы, поступившие на вход подсистемы 17, после аналого-цифрового преобразования в блоке 18 и спектрального анализа сигналов в блоке 19 на основе алгоритмов БПФ спектры сигналов звукового давления и компонент вектора градиента давления поступают в блок 20 для вычисления полного набора информативных параметров An для суммарного процесса (S+N), включающих звуковое давление p(ω,z,r), компоненты комплексного вектора интенсивности I(ω,z,r), компоненты вещественного ротора вектора интенсивности rot I(ω,z,r) и компоненты комплексного вектора градиента давления g(ω,z,r):

Для вычисления спектров перечисленных 16 информативных параметров используются хорошо известные формулы (Щуров В.А. Векторная акустика океана. Владивосток: Дальнаука, 2003. 308 с.). Сигналы с выхода блока 20 вычисления полного набора информативных параметров для суммарного процесса (S+N) поступают на вход блока 21 вычисления полного набора информативных параметров для помехи N в соответствии с алгоритмом усреднения спектра суммарного процесса (S+N) окном Хэмминга


где 2Δƒ0 - ширина окна Хэмминга, ƒ0 - средняя частота дискретной составляющей вально-лопастного звукоряда, Δƒ0 - варьируемый параметр, примерно на порядок превышающий ширину дискретной составляющей Δƒ в спектре суммарного процесса (S+N).
С выхода блока 21 вычисления полного набора информативных параметров для помехи N и второго выхода блока 20 вычисления полного набора информативных параметров для суммарного процесса S+N сигналы поступают на вход блока 22 вычисления отношения сигнал-помеха (S/N) для полного набора информативных параметров. Сформированные в блоке 22 отношения (S/N) по всем информативным параметрам поступают в компаратор 23, выбирающий информативный параметр, которому соответствует максимальное отношение (S/N), увеличивая тем самым помехоустойчивость приемной системы и вероятность правильного обнаружения спектральных составляющих на фоне помехи. С выхода компаратора 23 сигналы поступают в типовой обнаружитель 24 порогового типа.
Для определения горизонта источника сигналы с выхода блока 20 вычисления полного набора информативных параметров для суммарного процесса (S+N) поступают на вход блока 27 вычисления горизонта источника шумового сигнала. В этом блоке вычисляются радиальные компоненты ротора вектора интенсивности по формулам

а за горизонт цели принимается горизонт приемного модуля, которому соответствует максимальное значение радиальной компоненты ротора вектора интенсивности (6).
Для определения пеленга на цель в пассивном режиме в локальной системе координат, связанной с комбинированными приемниками, сигналы с выхода блока 20 вычисления полного набора информативных параметров для суммарного процесса (S+N) поступают на вход блока 25 вычисления пеленга Ψц(1) на источник шумового сигнала, где искомый пеленг вычисляется по формулам

где Pm=р2m - мощность сигнала, регистрируемого в канале звукового давления m-го комбинированного приемника.
После того, как цель обнаружена в блоке 24 в режиме пассивного шумопеленгования, гидроакустическая станция переходит в активный режим определения координат и параметров движения цели. Для этого приемо-передающая антенна 4 излучает импульсные сигналы, синхронизированные с работой донной М - элементной протяженной приемной антенны 10. Принятые антенной 10 сигналы с выхода блока 18 аналого-цифровых преобразователей поступают в блок 28 корреляционной обработки сигналов, вход которого соединен по радиоканалу с выходом надводного блока 9 обработки и визуализации, а искомые координаты и параметры движения цели определяются в блоке 29 по формулам (8)-(12)





где R0=RИЦ -- расстояние между излучателем и целью, R1m - расстояние между m-ым комбинированным приемником и целью,, R2m - расстояние между излучателем и m-ым комбинированным приемником, αm - угол места, под которым цель наблюдается m-ым комбинированным приемником, βm - угол места, под которым излучатель наблюдается m-ым комбинированным приемником, γ - угол места, под которым цель наблюдается излучателем, ν(НЦ) - радиальная скорость движения цели, Δτ0 - задержка сигнала, принятого антенной 4, относительно момента излучения, Δτ1m - задержка отраженного целью сигнала, принятого m-ым комбинированным приемником, относительно прямого сигнала, Δτ2m - задержка сигнала, принятого m-ым комбинированным приемником, относительно момента излучения, Ψц(2) - пеленг цели, определяемый в активном режиме, Ψ0m(2) - пеленг излучателя относительно m-го комбинированного приемника.
Гидроакустическая станция контроля подводной обстановки, включающая надводный блок обработки и визуализации, подводный модуль, содержащий приемно-излучающую антенну, генератор, коммутатор, через который генератор подключен к приемно-излучающей антенне, блок аналогово-цифровых преобразователей, подключенный к коммутатору, блок управления, подключенный к блоку аналогово-цифровых преобразователей, блок интерфейса, подключенный между выходом блока управления и надводным блоком обработки и визуализации, подводный кабель, соединяющий надводный блок обработки и визуализации и подводный модуль, донную протяженную антенну, состоящую из совокупности последовательно соединенных приемных модулей, шины данных, блока управления, интерфейса и подводного кабеля, отличающаяся тем, что в состав гидроакустической станции дополнительно введен береговой пост обработки и визуализации, связанный радиоканалом с обеспечивающим судном и подводным кабелем с донной протяженной антенной, а надводный блок обработки и визуализации расположен на обеспечивающем судне, при этом донная протяженная антенна выполнена посредством М приемных модулей эквидистантной, вертикально ориентированной антенной, в которой расстояние между приемными модулями равно заданной погрешности определения вертикальной координаты (горизонта) источника шумового сигнала Δz, число приемников M=H/Δz (Н-глубина моря в месте установки антенны), а приемные модули снабжены акустическими комбинированными приемниками и датчиками углового положения, в береговой пост обработки и визуализации включена подсистема обнаружения, пеленгования и определения горизонта источника шумового сигнала, содержащая 4М-канальный блок аналогово-цифровых преобразователей, вход которого соединен подводным кабелем с выходом интерфейса донной протяженной антенны, 4М-канальный анализатор спектра, вход которого соединен с выходом 4М-канального блока аналогово-цифровых преобразователей, М-канальный блок вычисления полного набора информативных параметров для суммарного процесса сигнал плюс помеха (S+N), вход которого соединен с выходом 4М-канального анализатора спектра, М-канальный блок вычисления полного набора информативных параметров для помехи N, вход которого соединен с выходом М-канального блока вычисления полного набора информативных параметров для суммарного процесса (S+N), М-канальный блок вычисления отношения сигнал-помеха (S/N) для полного набора информативных параметров, вход которого соединен с выходом М-канального блока вычисления полного набора информативных параметров для помехи N и вторым выходом М-канального блока вычисления полного набора информативных параметров для суммарного процесса (S+N), компаратор, вход которого соединен с выходом блока вычисления отношения сигнал-помеха (S/N) для полного набора информативных параметров, обнаружитель порогового типа, вход которого соединен с выходом компаратора, М-канальный блок вычисления пеленга на источник шумового сигнала, вход которого соединен с третьим выходом М-канального блока вычисления полного набора информативных параметров для суммарного процесса (S+N), М-канальный блок вычисления пеленга на приемно-излучающую антенну, вход которого соединен с четвертым выходом М-канального блока вычисления полного набора информативных параметров для суммарного процесса (S+N), блок вычисления горизонта источника шумового сигнала, вход которого соединен с пятым выходом М-канального блока вычисления полного набора информативных параметров для суммарного процесса (S+N), а также расположенные в береговом посту обработки и визуализации М-канальный блок корреляционной обработки сигналов, вход которого соединен по радиоканалу с выходом надводного блока обработки и визуализации, и блок вычисления координат и параметров движения цели, первый вход которого соединен с выходом блока корреляционной обработки сигналов, второй вход связан с выходом блока вычисления горизонта источника шумового сигнала, третий вход связан с выходом М-канального блока вычисления пеленга на источник шумового сигнала, четвертый вход связан с выходом М-канального блока вычисления пеленга на приемно-излучающую антенну.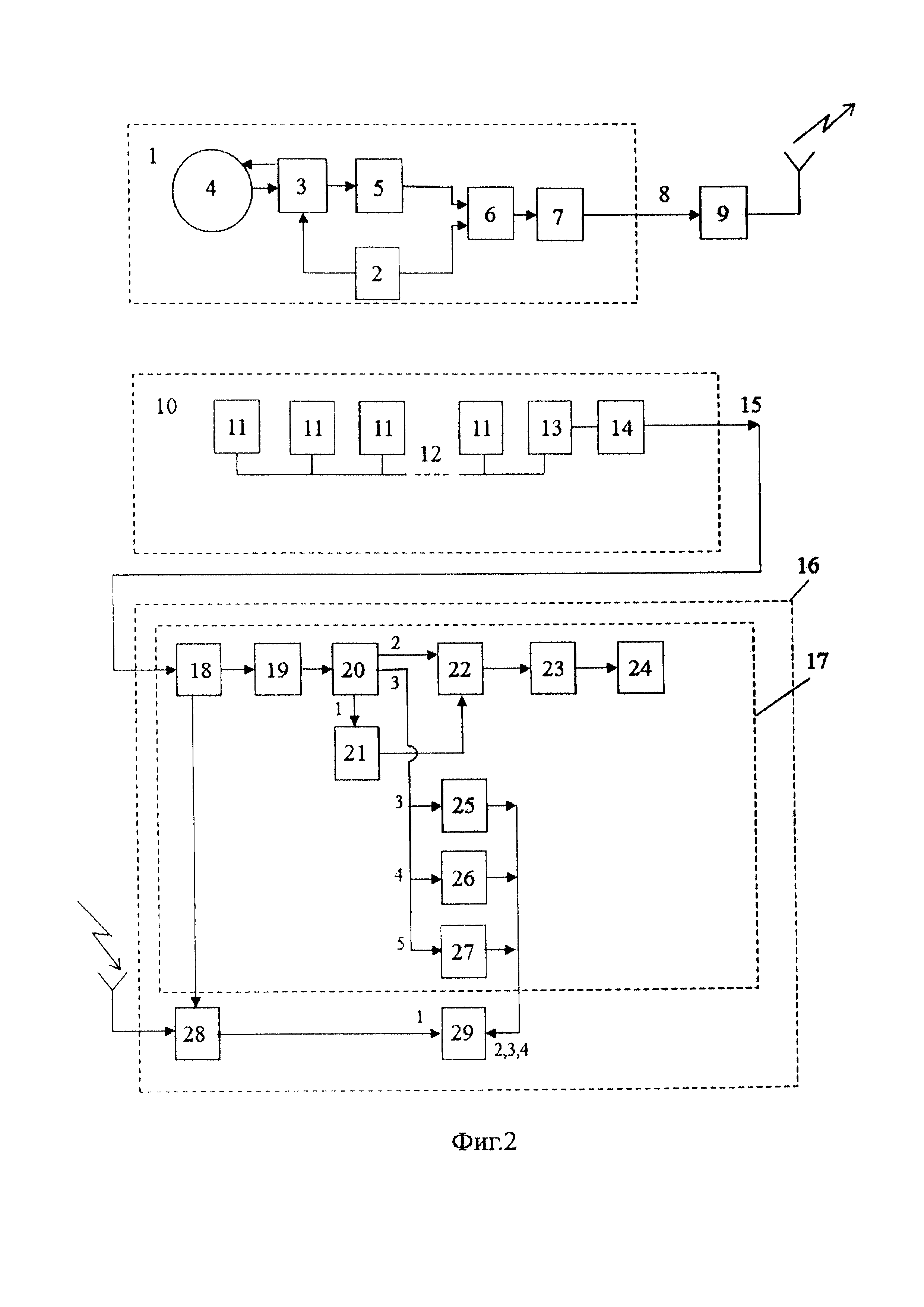
Способ изготовления цилиндрической оболочки прочного корпуса подводного аппарата из стеклометаллокомпозита
Способ изготовления цилиндрической оболочки прочного корпуса подводного аппарата из стеклометаллокомпозита
Устройство для бесконтактной передачи электроэнергии на подводный объект (варианты)
Способ изготовления листового стеклометаллокомпозита
Спускоподъемное устройство
Способ профилирования донных отложений
Способ профилирования донных отложений
Устройство для зарядки аккумуляторной батареи
Гидроакустический комплекс для обнаружения движущегося заглубленного источника звука и измерения его координат в мелком море
Устройство для зарядки аккумуляторной батареи подводного объекта
Гидроакустический комплекс для измерения азимутального угла на источник звука в мелком море
Гидроакустический комплекс для измерения азимутального угла и горизонта источника звука в мелком море
Гидроакустический комплекс для измерения координат источника звука в мелком море
Гидроакустический комплекс для обнаружения движущегося источника звука, измерения азимутального угла на источник и горизонта источника звука в мелком море
Способ профилирования донных отложений
Способ профилирования донных отложений
Гидроакустический комплекс для обнаружения движущегося заглубленного источника звука и измерения его координат в мелком море
Комбинированный гидроакустический приемник
Устройство для имитации излучения звука подводным движущимся объектом
Гидроакустический комплекс для обнаружения движущегося источника звука, измерения азимутального угла на источник и горизонта источника звука в мелком море

