Результат интеллектуальной деятельности: ТРЕНАЖЕР ПАРАШЮТИСТА-ДЕСАНТНИКА И СПОСОБ ДИНАМИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБУЧЕНИЯ НА НЕМ
Вид РИД
Изобретение
Изобретение относится к парашютно-десантной технике, а именно к конструкциям тренажеров для воздушного десанта. Предназначен для практических тренировок и отработки элементов прыжка с динамическим сопровождением обучения.
Известен тренажер (Патент СССР №1798257 А1, МПК B64D 23/00, 1993 г.), который содержит башенный ствол, консольные стрелы, привод вращения, подвеску.
Недостатком указанного тренажера является то, что он выполнен стационарным и его конструкция предполагает относительно большие габаритные размеры, это увеличивает ветровые, динамические и эксплуатационные нагрузки, влияющие на требования к выбору места его установки, кроме того, конструктивные особенности тренажера не предполагают его использование для отработки ряда элементов прыжка, связанные с раскрытием и управлением какой либо парашютной системой, помимо этого, распределение нагрузки сил, возникающих при раскрытии парашюта не соответствуют реальному воздействию на парашютиста при совершении прыжка, это ведет к привитию ложных навыков и ощущений восприятия прыжка с неадекватной имитацией загрузки органов чувств, при этом исключается возможность формирования необходимых навыков связанных с отработкой вопросов по вводу в действие запасного парашюта в нештатных ситуациях тем самым, ограничиваются возможности моделирования ситуационных задач отрабатываемых в ходе подготовки к совершению прыжка.
Известен тренажер-симулятор парашютного прыжка (Патент США, US №6000942 А, 1999 г.), который содержит силовой каркас с системой крепления к ней ранца с подвесной системой, две стропы управления с системой датчиков, регистрирующих величины втягивания строп управления обучаемым, очки виртуальной реальности для моделирования в них системы визуализации внешней обстановки, комплект кабелей, осуществляющих передачу входных и выходных сигналов между исполнительными механизмами и управляющим компьютером, а также управляющим компьютером, позволяющий в зависимости от выбранной программы инструктором, управлять работой визуального ряда, проецируемого в очках виртуальной реальности, регистрировать параметры управляемого полета парашютиста, анализировать результаты деятельности парашютиста для выставления автоматизированной оценки.
Недостатком указанного тренажера является то, что в нем конструктивно не предусмотрено должного динамического сопровождения обучения при моделируемых сценариях парашютных прыжков. Однако наличие при реальном прыжке динамических нагрузок непосредственно воздействует на ощущения обучаемого и способствует выполнению им неправильных действий при управлении парашютной системой. Это может привести к нештатным ситуациям.
Технический результат направлен на повышение качества подготовки парашютистов к совершению прыжков за счет применения динамического и синхронно с ним видео-аудиосопровождений.
Технический результат достигается тем, что в тренажер парашютиста-десантника, содержащий управляющий компьютер, рабочее место инструктора (преподавателя), ранец с подвесной системой, левую и правую стропы управления, очки виртуальной реальности для моделирования в них системы визуализации внешней обстановки, систему датчиков и комплект кабелей, дополнительно введены первая, вторая, третья и четвертая опоры, которые жестко соединены в верхней своей части соответственно с первой, второй, третьей и четвертой двутавровой балками, образуя при этом пространство в виде четырехугольника, а на второй и четвертой двутавровых балках установлены пятая и шестая двутавровые балки с возможностью перемещения вдоль длинны второй и четвертой двутавровых балок за счет установленных на каждом из их концов по электроприводу, при этом между пятой и шестой двутавровой балкой установлена подвижная тележка, которая образована жестко соединенными первой, второй, третьей и четвертой швеллерными балками, при этом с возможностью перемещения вдоль длинны пятой и шестой двутавровой балки за счет установленной на второй швеллерной балке электропривода, при этом на первой и третьей швеллерной балке подвижной тележки установлены соответственно первый и второй электроприводы тросовых строп, с возможностью подъема (опускания) рамки подвеса парашютиста, к которой закреплены первый, второй и третий, четвертый свободные концы подвесной системы парашютиста с ранцем, при этом крепление тросовых строп осуществляют через первый и второй кронштейны привода осевого вращения, с возможностью вращения вокруг своей оси рамки подвеса парашютиста, к которой закреплена подвесная система парашютиста с ранцем, при этом перпендикулярно плоскости, образуемой первым и вторым свободными концам подвесной системы, на левом и правом концах рамки подвеса парашютиста размещены левый и правый электроприводы с возможностью сматывания (разматывания) строп управления под действием усилий левой и правой рук обучаемого на соответствующие звенья управления, кроме того, очки виртуальной реальности снабжены встроенными в них аудионаушниками, кроме того, устройство регистрации положения рук выполнено в виде перчаток.
Способ динамического сопровождения обучения на тренажере парашютиста-десантника, описанный системой уравнений:

где  - результирующий вектор ускорений, передаваемый центру масс обучаемого при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления,
- результирующий вектор ускорений, передаваемый центру масс обучаемого при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления,
 - результирующий вектор ускорений, передаваемый центру масс парашютиста при моделировании прыжка на тренажере с продолжительностью воздействия s,
- результирующий вектор ускорений, передаваемый центру масс парашютиста при моделировании прыжка на тренажере с продолжительностью воздействия s,
 - функция от различных переменных,
- функция от различных переменных,
l1, l2 - величины втягивания левой (1) и правой (2) строп управления,
 - вектор ускорения ветра на различных высотах h,
- вектор ускорения ветра на различных высотах h,
 - вектор ускорения свободного падения, действующий на центр масс парашютиста при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления,
- вектор ускорения свободного падения, действующий на центр масс парашютиста при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления,
R - выбранный режим обучения на тренажере при отработке штатных и нештатных сценариев при различных метеопогодных условиях,
t - временной показатель, характеризующий место парашютиста в точке траектории его снижения при отработке сценария прыжка (реального и смоделированного) от момента отделения от летательного аппарата до приземления; и заключающийся в импульсной передаче результирующего вектора ускорений, передаваемого центру масс парашютиста в направлении движения обучаемого, моделируемого на тренажере, при этом величины и направления ускорений, полностью соответствуя реальному прыжку, кратковременно воздействуют на обучаемого ввиду ограниченных геометрических размеров тренажера, при этом моделирование величин и направление результирующего вектора ускорений и их продолжительность воздействия на обучаемого задаются управляющим компьютером на основе информации о: массе обучаемого, величине втягивания левой и правой строп управления, точке в траектории снижения парашютиста, проходящей им в реальном времени от момента отделения от летательного аппарата до приземления, выбранном режиме обучения на тренажере при отработке штатных и нештатных сценариев при различных метеопогодных условиях, величине и направлении вектора ускорения ветра на различных высотах, а также о величине и направлении вектора ускорения свободного падения, действующего на центр масс парашютиста при совершении прыжка в любой точке траектории снижения парашютиста при отработке сценария прыжка.
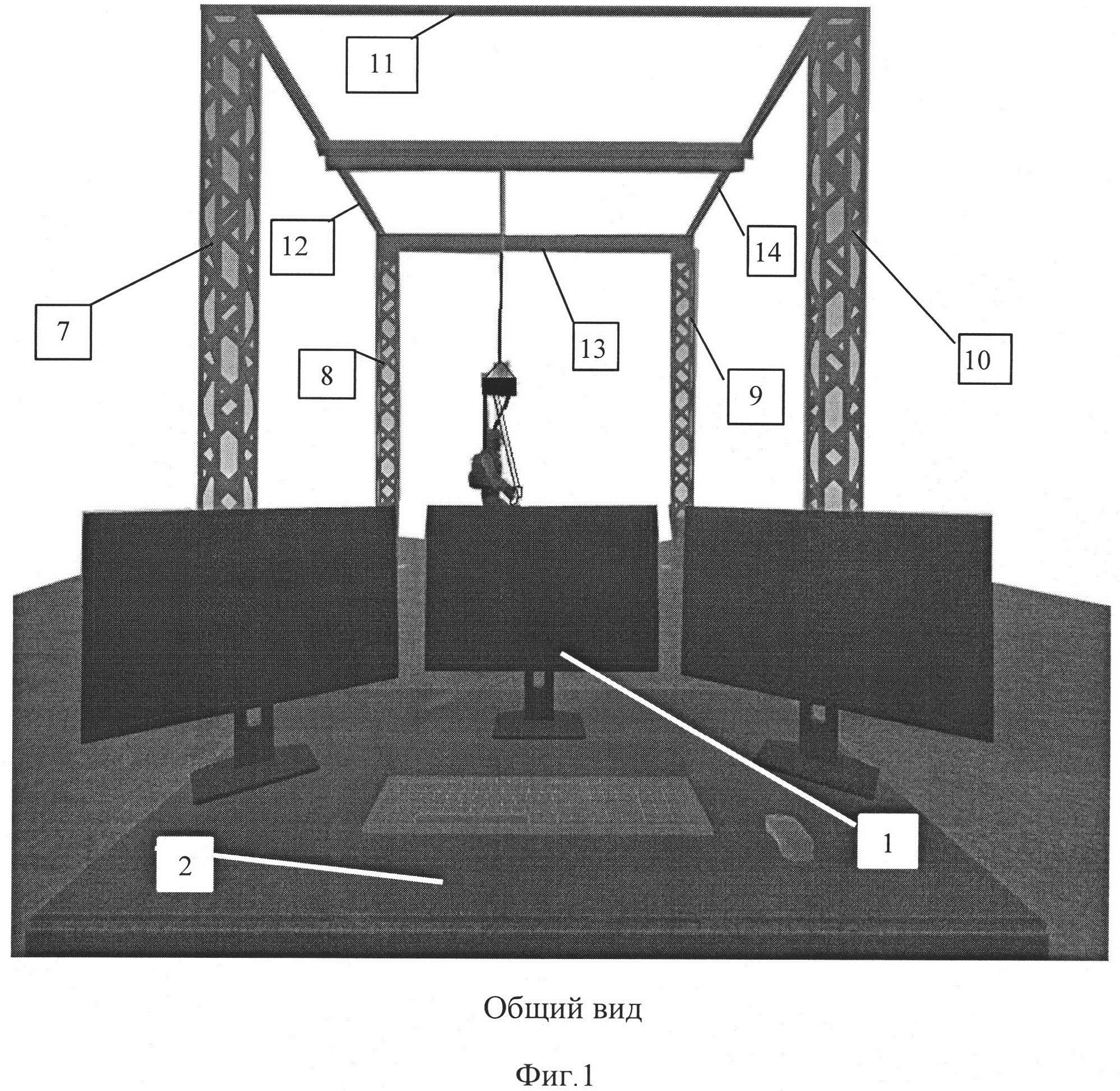
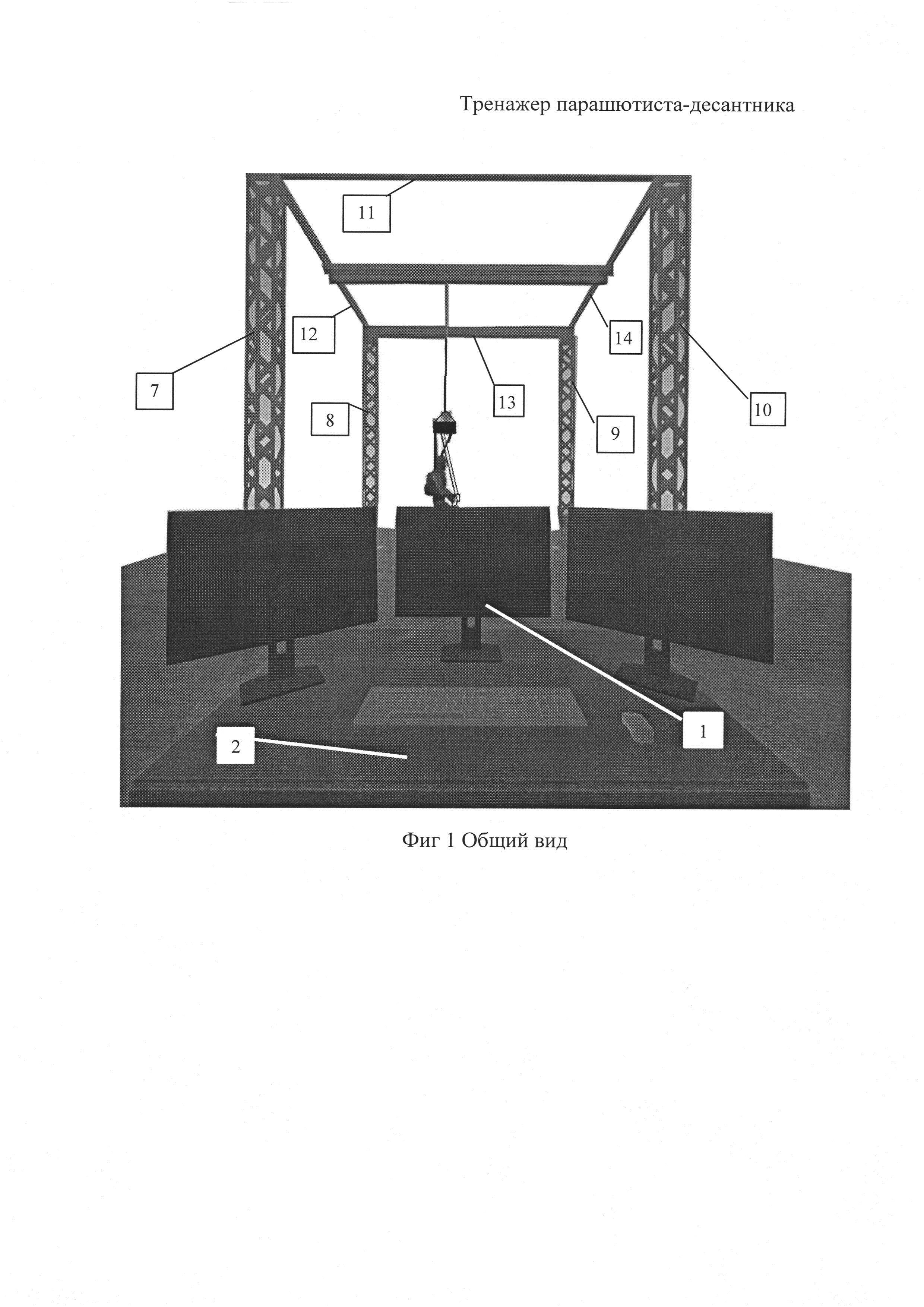
На фигуре 1 представлен общий вид тренажера парашютиста-десантника (с рабочего места преподавателя).
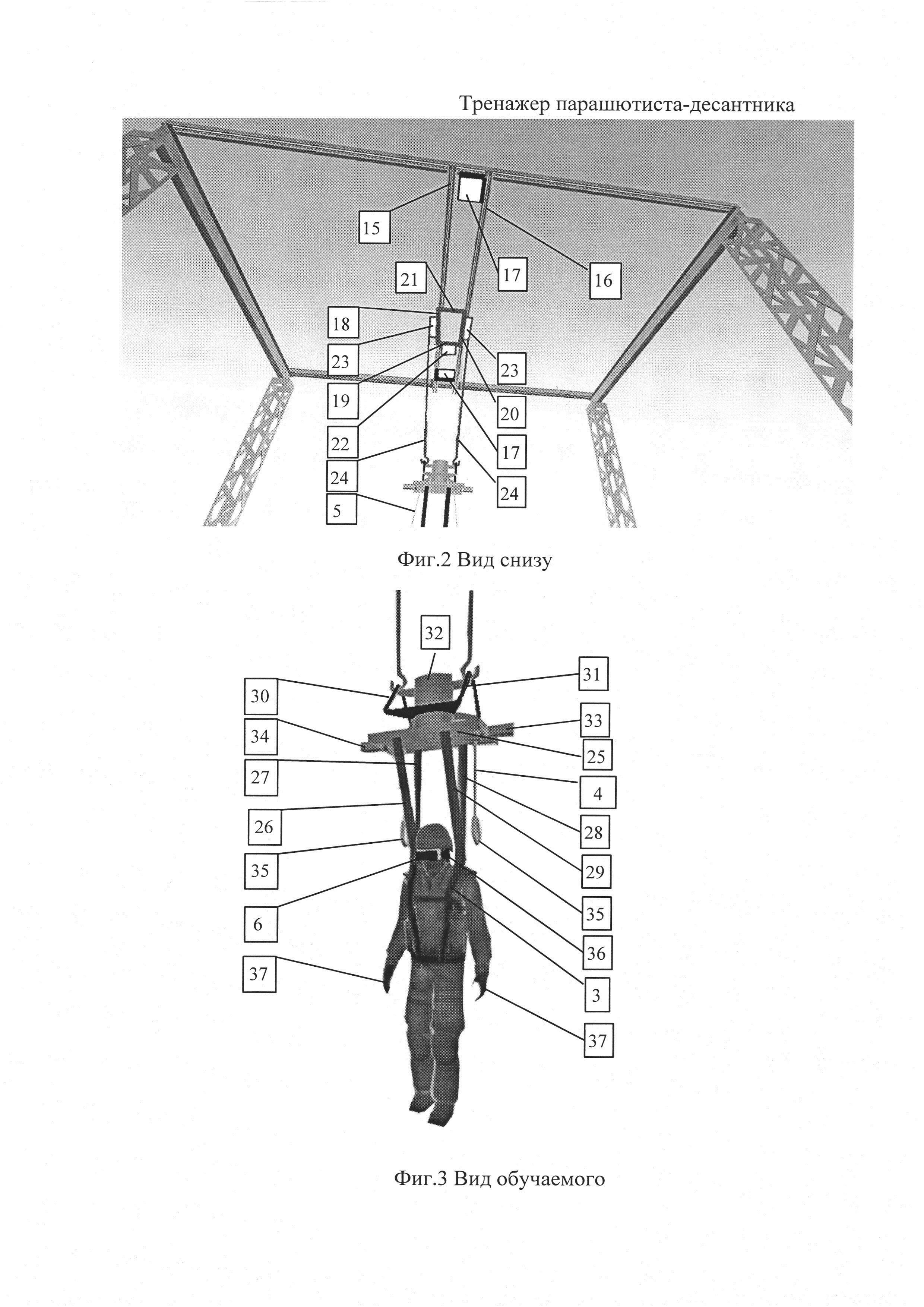
На фигуре 2 показан вид снизу тренажера парашютиста-десантника.
На фигуре 3 показан вид обучаемого на тренажере парашютиста-десантника.
Тренажер содержит (фиг. 1) управляющий компьютер 1, рабочее место инструктора (преподавателя) 2, (фиг. 3) ранец с подвесной системой 3, левая 4 и правая 5 (на фиг. 2) стропы управления, очки виртуальной реальности 6, систему датчиков и кабелей (в графической части не показаны); (фиг. 1) первую 7, вторую 8, третью 9 и четвертую 10 опоры, первую 11, вторую 12, третью 13 и четвертую 14 неподвижные двутавровые балки, (фиг. 2:) пятую 15 и шестую 16 подвижные двутавровые балки, два электропривода 17, подвижную тележку, образованную первой 18, второй 19, третьей 20 и четвертой 21 швеллерными балками, электропривод 22 тележки, первый и второй электроприводы 23 тросовых строп 24, (фиг. 3) рамку подвеса парашютиста 25, первый 26, второй 27, третий 28 и четвертый 29 свободные концы подвесной системы парашютиста с ранцем 3, первый 30 и второй 31 кронштейны привода осевого вращения 32, левый 33 и правый 34 электроприводы сматывания (разматывания) левой 4 и правой 5 строп управления, звенья 35 управления, встроенные аудионаушники 36 в очки виртуальной реальности 6, устройство регистрации положения рук 37.
Управляющим компьютер 1 включает систему мониторов, персональных ЭВМ (в графической части не показаны) и промежуточные механизм (в графической части не показаны) и предназначен для обеспечения работы тренажера, за счет программно-аппаратного комплекса анализирующего входные сигналы о действиях обучаемого, массе обучаемого, выбранного режиме обучения на тренажере при отработке штатных и нештатных сценариев при различных метеопогодных условиях, а также на основе информации о точке в траектории снижения парашютиста, проходящей им в реальном времени от момента отделения от летательного аппарата до приземления; для автоматической оценки деятельности обучаемых, за счет сбора, сохранения и последующей обработке информации о действиях парашютиста при прохождении им любой точки в траектории моделируемого снижения.
Рабочее место инструктора (преподавателя) 2 включает удобный для работы стол и стул.
Ранец с подвесной системой 3 представляет собой штатную подвесную систему парашютной системы типа «летающее крыло», и предназначен для размещения обучаемого при отработке учебных задач. Левая 4 и правая 5 (на фиг. 2) стропы управления представляют собой штатные стропы управления парашютной системы типа «летающее крыло» и предназначены для передачи управляющих сигналов от парашютиста на промежуточные механизмы (левый 33 и правый 34 электроприводы сматывания (разматывания) строп управления) для последующей их обработки программно-аппаратным комплексом управляющего компьютера 1. Очки виртуальной реальности 6, дополненные встроенными аудионаушниками 36, представляют собой известный из уровня техники серийно выпускаемое устройство фирмы «Oculus», и предназначены для создания видео-аудиосопровождения обучению на тренажере при прохождении обучаемым любой точки траектории моделируемого снижения; а также за счет имеющихся в составе очков виртуальной реальности системы датчиков, определяющих положение головы и направление взгляда парашютиста, получать информацию для последующей обработки программно-аппаратным комплексом управляющего компьютера 1 для автоматической оценки действий обучаемого.
Первая 7, вторая 8, третья 9 и четвертая 10 опоры представляют собой стойки из металлоконструкции, например, типа крановых, установлены жестко на поверхности пола.
В верхней своей части первая 7, вторая 8, третья 9 и четвертая 10 опоры жестко соединены соответственно с первой 11, второй 12, третьей 13 и четвертой 14 неподвижными двутавровыми балками, образуя при этом пространство в виде четырехугольника. Эта конструкция позволяет обеспечить возможность перемещения пятой 15 и шестой 16 подвижных двутавровых балок вдоль длинны второй 12 и четвертой 14 неподвижных двутавровых балок за счет установленных на каждом из их концов по электроприводу 17. Два электропривода 17 представляет собой одинаковые конструкции электромоторов с обратной связью, предназначенные для регистрации данных о координатах нахождения пятой 15 и шестой 16 подвижных двутавровых балок относительно второй 12 и четвертой 14 неподвижных двутавровых балок для последующей их обработки программно-аппаратным комплексом управляющего компьютера 1; для передачи требуемого вектора ускорения в направлении движения парашютиста, соответствующего направлению движения вдоль длинны второй 12 и четвертой 14 неподвижных двутавровых балок.
Подвижная тележка, образованная первой 18, второй 19, третьей 20 и четвертой 21 швеллерными балками размещена между пятой 15 и шестой 16 подвижной двутавровой балкой с возможностью перемещения за счет электропривода 22, установленного на второй 19 швеллерной балке вдоль длинны пятой 15 и шестой 16 подвижной двутавровой балки. Электропривод 22 представляет собой электромотор с обратной связью и предназначен для регистрации данных о координатах нахождения подвижной тележки относительно пятой 15 и шестой 16 подвижных двутавровых балок для последующей их обработки программно-аппаратным комплексом управляющего компьютера 1; для передачи требуемого вектора ускорения в направлении движения парашютиста, соответствующего направлению движения вдоль длинны пятой 15 и шестой 16 подвижных двутавровых балок.
На первой 18 и третьей 20 швеллерной балке подвижной тележки установлены соответственно первый и второй электроприводы 23 тросовых строп 24 для обеспечения подъема (опускания) рамки подвеса парашютиста 25. Электроприводы 23 представляют собой электромоторы с обратной связью и предназначены для регистрации данных о координатах нахождения рамки подвеса парашютиста 25 относительно высоты нахождения обучаемого над уровнем пола для последующей их обработки программно-аппаратным комплексом управляющего компьютера 1; для передачи требуемого вектора ускорения в направлении снижения (подъема) парашютиста, соответствующего направлению снижения (подъема) в плоскости, образованной тросовыми стропами 24. Тросовые стропы 24 представляют собой металлические тросы, предназначенные для подъема, опускания и удержания обучаемого на заданной программно-аппаратным комплексом управляющего компьютера 1 высоте над уровнем пола. Тросовые стропы 24 соединены крюками с первым 30 и вторым 31 кронштейном привода осевого вращения 32. Такое соединение тросовых стропы 24 позволяет незначительно поднимать (опускать) первый 30 и (или) второй 31 кронштейны вниз (вверх) независимо друг от друга. Это позволяет при отработке учебных задач на тренажере, при размещении обучаемого в подвесной системе таким образом, чтоб первый 30 кронштейн находился над правым плечом, а второй 31 над левым плечом моделировать динамическое сопровождение связанное с рядом особых случаев, например само отцеп одного из свободных концов подвесной системы. Для этого программно-аппаратный комплекс управляющего компьютера 1 подает команду на электроприводы 23, при этом тросовые стропы 24 начинают: одна - наматываться, вторая разматываться, образуя разность высот над уровнем пола первого 30 и второго 31 кронштейнов привода осевого вращения 32. Таким образом, обучаемый ощущает динамический провал одного плеча вниз, при этом осуществляется видео-аудиосопровождение учебного сценария прыжка. Первый 30 и второй 31 кронштейны жестко связаны с корпусом привода осевого вращения 32, который представляет собой электромотор с обратной связью, предназначенный для регистрации данных о угле поворота рамки подвеса парашютиста 25 относительно плоскости, образованной тросовыми стропами 24 для последующей их обработки программно-аппаратным комплексом управляющего компьютера 1; для передачи требуемого вектора углового ускорения в направлении вращения парашютиста, в зависимости от направления его движения.
Вращающийся шкив привода осевого вращения 32 жестко связан с рамкой подвеса парашютиста 25, состоящей из металлоконструкций, образующих прямоугольник для крепления к ней первого 26, второго 27, третьего 28 и четвертого 29 свободных конца подвесной системы парашютиста с ранцем 3. Свободные концы подвесной системы парашютиста представляю собой штатные свободные концы и предназначены для удержания обучаемого над уровнем пола, при чем углы между первым 26 и вторым 27, а также между третьим 28 и четвертым 29 свободными концами соответствуют реальным углам между аналогичными свободными концами парашютной системы типа «летающее крыло».
Левый 33 и правый 34 электроприводы сматывания (разматывания) строп управления размещаются перпендикулярно плоскости, образуемой первым 26 и вторым 27 свободными концам подвесной системы, на левом и правом концах рамки подвеса парашютиста 25 и представляют собой электромоторы с обратной связью и предназначены для регистрации данных о координатах нахождения звеньев управления 35 соответствующих строп управления в зависимости от действий левой и правой рук обучаемого для последующей их обработки программно-аппаратным комплексом управляющего компьютера 1.
Устройство регистрации положения рук в виде перчаток 37 известны из уровня техники и используются как беспроводная гарнитура к очкам виртуальной реальности, причем они позволяют позиционировать моторику рук, передавать соответствующие сигналы программно-аппаратному комплексу управляющего компьютера 1, а также проецироваться в моделируемой среде через очки виртуальной реальности 6 с аудионаушниками 36. Использование устройства регистрации положения рук виде перчаток 37 позволяют программно-аппаратному комплексу управляющего компьютера 1 управлять как динамическим сопровождением так и моделируемой средой в очках виртуальной реальности 6. Например, при моделировании этапа прыжка - стабилизированной снижение (до раскрытия основной парашютной системы) может возникнуть вращение вокруг своей оси парашютиста. Это вращение будет создаваться приводом осевого вращения 32. Для ликвидации вращения необходимо правильно расположить ладони левой и правой рук парашютиста относительно оси вращения. Эти действия обучаемого будут фиксироваться устройством регистрации положения рук виде перчаток 37. Результатом работы обучаемого в приведенном примере будет прекращение вращения вокруг своей оси.
Для повышения качества подготовки парашютистов в работе тренажера используется способ динамического сопровождения обучения на тренажере парашютиста-десантника, описанный системой уравнений:

где  - результирующий вектор ускорений, передаваемый центру масс обучаемого при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления,
- результирующий вектор ускорений, передаваемый центру масс обучаемого при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления,
 - результирующий вектор ускорений, передаваемый центру масс парашютиста при моделировании прыжка на тренажере с продолжительностью воздействия s,
- результирующий вектор ускорений, передаваемый центру масс парашютиста при моделировании прыжка на тренажере с продолжительностью воздействия s,
 - функция от различных переменных,
- функция от различных переменных,
l1, l2 - величины втягивания левой (1) и правой (2) строп управления,
 - вектор ускорения ветра на различных высотах h,
- вектор ускорения ветра на различных высотах h,
 - вектор ускорения свободного падения, действующий на центр масс парашютиста при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления,
- вектор ускорения свободного падения, действующий на центр масс парашютиста при совершении прыжка в любой точке траектории снижения парашютиста, которую обучаемый проходит в реальном времени t от момента отделения от летательного аппарата до приземления,
R - выбранный режим обучения на тренажере при отработке штатных и нештатных сценариев при различных метеопогодных условиях,
t - временной показатель, характеризующий место парашютиста в точке траектории его снижения при отработке сценария прыжка (реального и смоделированного) от момента отделения от летательного аппарата до приземления; и заключающийся в импульсной передаче результирующего вектора ускорений, передаваемого центру масс парашютиста в направлении движения обучаемого, моделируемого на тренажере, при этом величины и направления ускорений, полностью соответствуя реальному прыжку, кратковременно воздействуют на обучаемого ввиду ограниченных геометрических размеров тренажера, при этом моделирование величин и направление результирующего вектора ускорений  и их продолжительность воздействия на обучаемого s задаются управляющим компьютером на основе информации о: массе обучаемого m, величине втягивания левой l1 и правой l2 строп управления, точке в траектории снижения парашютиста, проходящей им в реальном времени от момента отделения от летательного аппарата до приземления (оценивается временным показателем t), выбранном режиме обучения на тренажере R при отработке штатных и нештатных сценариев при различных метеопогодных условиях, величине и направлении вектора ускорения ветра
и их продолжительность воздействия на обучаемого s задаются управляющим компьютером на основе информации о: массе обучаемого m, величине втягивания левой l1 и правой l2 строп управления, точке в траектории снижения парашютиста, проходящей им в реальном времени от момента отделения от летательного аппарата до приземления (оценивается временным показателем t), выбранном режиме обучения на тренажере R при отработке штатных и нештатных сценариев при различных метеопогодных условиях, величине и направлении вектора ускорения ветра  на различных высотах, а также о величине и направлении вектора
на различных высотах, а также о величине и направлении вектора  ускорения свободного падения, действующего на центр масс парашютиста при совершении прыжка в любой точке траектории снижения парашютиста при отработке сценария прыжка. При этом, величины и направления вектора ускорения ветра
ускорения свободного падения, действующего на центр масс парашютиста при совершении прыжка в любой точке траектории снижения парашютиста при отработке сценария прыжка. При этом, величины и направления вектора ускорения ветра  на различных высотах и величины и направления вектора
на различных высотах и величины и направления вектора  ускорения свободного падения, действующие на центр масс парашютиста при совершении прыжка в любой точке траектории снижения используются из статистических наблюдений за деятельностью парашютиста при его управляемом снижении. При моделировании результирующего вектора ускорений
ускорения свободного падения, действующие на центр масс парашютиста при совершении прыжка в любой точке траектории снижения используются из статистических наблюдений за деятельностью парашютиста при его управляемом снижении. При моделировании результирующего вектора ускорений  на тренажере для учета влияния величин векторов
на тренажере для учета влияния величин векторов  и
и  используется показатель R выбранного режима обучения.
используется показатель R выбранного режима обучения.
Работа предлагаемого тренажера осуществляется следующим образом.
Вариант I - Работа тренажера (штатная ситуация), например отработка действий парашютиста от момента покидания ЛА до приземления на парашютной системе типа «летающее крыло» (фиг. 3).
Обучаемый экипируется, надевает очки виртуальной реальности 6 с аудионаушниками 36, устройства регистрации положения рук в виде перчаток 37, занимает позицию, соответствующую изготовке десантника к отделению от ЛА. При этом одна из рук десантника должно сжимать звено ручного раскрытия парашютной системы (в графической части не представлено). С рабочее место инструктора (преподавателя) 2 через управляющий компьютер 1 задаются данные (уравнение 2) о массе обучаемого m, выбранном режиме обучения R на тренажере при отработке штатных и нештатных сценариев при различных метеопогодных условиях.
Далее с рабочее место инструктора (преподавателя) 2 через управляющий компьютер 1 запускается программа, которая осуществляет управление тренажером. Первоначально осуществляется моделирование в очках виртуальной реальности 6 с аудионаушниками 36 момента покидания десантником ЛА, после команды «Пошел» обучаемый делает энергичный поступательный толчок левой ногой вперед при этом две стропы тросового привода 24 (за счет работы электроприводов 23) плавно подымают парашютиста на минимальное расстояние вверх. Время подъема соответствует времени стабилизированного снижения. Обучаемый получает визуальное, звуковое и динамическое сопровождение стабилизированного падения. Динамическое сопровождение заключается в импульсном вращении обучаемого вокруг своей оси с чередованием направления вращений, как по часовой, так и против хода часовой стрелки (за счет работы привода осевого вращения 32), в импульсных колебаниях в горизонтальной плоскости (за счет одновременной работы электроприводов 22 и 17).
При выдергивании звена ручного раскрытия парашютистом, производиться визуальное, звуковое и динамическое сопровождение раскрытия основной парашютной системы. Динамическое сопровождение состоит в максимально быстром подъеме парашютиста в наивысшую вертикальную позицию, при этом две стропы тросового привода 24 (за счет работы электроприводов 23) максимально быстро поднимают парашютиста, моделирую при этом динамический рывок, и обеспечивает получение вектора ускорений, соответствующих реальному динамическому рывку. Продолжительность воздействия импульсного ускорения ограничивается геометрическими размерами тренажера, т.е. обучаемый за счет работы системы приводов набирает требуемое ускорение, но испытывает его кратковременно. При этом обучаемый получает синхронизированное аудио-видеосопровождение через очки виртуальной реальности 6 с аудионаушниками 36, заключающееся в проецировании меняющихся сцен при вступлении в работу основного купола и генерации сопутствующих звуков.
Для полного раскрытия основного купола парашютной системы обучаемый обеспечивает сход устройства рифления к верхним кольцам свободных концов подвесной системы. Для этого парашютист интенсивно перемещает стропы управления через звенья управления 35 вверх-вниз. Информация о величинах перемещений звеньев управления 35 поступает на управляющий компьютер 1 от левого 33 и правого 34 электроприводов для разматывания (сматывания) строп управления, размещенных перпендикулярно плоскости, образуемой первым 26 и вторым 27 свободными концам подвесной системы, на левом и правом концах рамки подвеса парашютиста 25. Все результаты действий обучаемого регистрируются программно-аппаратным комплексом управляющего компьютера 1 для последующей автоматической оценки, также осуществляется моделирование аудио-видеосопровождения в очках виртуальной реальности 6 с аудионаушниками 36 и управляемого динамического сопровождения в зависимости от действий обучаемого.
Далее обучаемый начинает ориентироваться в пространстве. При этом он через очки виртуальной реальности 6 с аудионаушниками 36 определяет свое положение, находит на площадке приземления место приземления, учитывая ветер вблизи земли и на высотах мысленно строит траекторию снижения к точке приземления. Для этого парашютист использует левую 4 и правую 5 стропы управления, при этом он внимательно следит за положением участников десантирования во избежание случайных схождений. На всех режимах управляемого снижения парашютист получает динамическое, визуальное и звуковое сопровождение.
Динамическое сопровождение заключается в передаче обучаемому импульсного вектора ускорений в направлении управляемого снижения парашютиста на величины достаточных перемещений, обеспечивающих их полное подобие реальному прыжку с парашютом, при этом осуществляется синхронное видео-аудиосопровождение через очки виртуальной реальности 6 с аудионаушниками 36.
Привод осевого вращения рамки подвеса парашютиста 32 создает нелинейные угловые ускорения вращения вокруг своей оси в зависимости от взаимного положения левой 4 и правой 5 строп управления парашютной системой. Например, если парашютист вытянул левую 4 стропу управления вниз до конца, при этом правая 5 стропа управления находилась в верхнем положении, то первый разворот на 360 градусов он совершит за 8 секунд, а уже третий за 4 секунды.
При подготовке к приземлению обучаемый анализирует проецируемое в очках виртуальной реальности 6 с аудионаушниками 36 элементы внешней среды, принимает решение по управлению парашютной системой для точного захода в створ против направления ветра, при этом обучаемый двигается в створе против направления ветра лицом к цели в момент непосредственного приземления. Именно это обеспечивает его безопасное приземление. Кроме того, убедившись, что приземление в заданной точке обеспечено, с высоты 25…30 метров обучаемый полностью отпускает стропы управления (в верхнее положение), набирает горизонтальную скорость, развиваемую парашютной системой и на высоте 3…6 метров втягивает стропы управления на полную длину рук (вниз). При этом происходит как бы «вспухание» купола и на время 1…3 секунды, вертикальная скорость снижается до 2 метров в секунду. Если обучаемый раньше втянет стропы управления на полную длину рук (высота более 6 метров), то через 3 и более секунды он приобретает вертикальную скорость снижения более 6 метров в секунду, что влечет получение серьезных травм от удара о землю. В результате действий обучаемого программно-аппаратный комплекс управляющего компьютера 1 сохраняет необходимую информацию о действиях парашютиста для последующей автоматической оценки, осуществляет моделирование аудио-видео и динамического сопровождений.
После касания ног поверхности земли обучаемый быстро отпускает стропы управления в верхнее положение, после чего резко втягивает одну из строп в нижнее положение на полную длину руки.
Во время работы тренажера в очках виртуальной реальности 6 с аудионаушниками 36 обучаемый наблюдает созданную в виртуальной среде подвесную систему, элементы купола, левую и правую стропы управления со звеньями, устройство рифления, свои руки - через устройство регистрации положения рук в виде перчаток 37, площадку приземления с достаточной детализацией в зависимости от высоты, солнце (луну), ЛА, метеоусловия и т.д. Аудиосопровождение включает гул ЛА, звуки ветра, звуки от работы парашютной системы, голоса на площадке приземления. Динамическое сопровождение управляемого снижения парашютиста в момент подготовки к приземлению также обеспечивается импульсными перемещениями пятой 15 и шестой 16 подвижными двутавровыми балками, подвижной тележкой, образованной первой 18, второй 19, третьей 20 и четвертой 21 швеллерными балками, тросовых строп 23 и приводом осевого вращения 32 по траекториям, задаваемым программно-аппаратным комплексом управляющего компьютера 1 в зависимости от положения строп управления через звенья управления 9, точки в траектории его снижения при отработке сценария прыжка, выбранного режима обучения с учетом вектора ускорения ветра на различных высотах и ускорения свободного падения, действующих на центр масс парашютиста. Окончание динамического сопровождения происходит после касания ног поверхности пола.
Вариант II - Работа тренажера (нештатная ситуация), например полный отказ основой парашютной системы.
Обучаемый экипируется, надевает очки виртуальной реальности 6 с аудионаушниками 36, устройства регистрации положения рук в виде перчаток 37, занимает позицию, соответствующую изготовке десантника к отделению от ЛА. При этом одна из рук десантника должно сжимать звено ручного раскрытия парашютной системы.
С рабочее место инструктора (преподавателя) 2 через управляющий компьютер 1 задаются данные (уравнение 2) о массе обучаемого т, выбранном режиме обучения R на тренажере при отработке штатных и нештатных сценариев при различных метеопогодных условиях.
Далее с рабочее место инструктора (преподавателя) 2 через управляющий компьютер 1 запускается программа, которая осуществляет управление тренажером. Первоначально осуществляется моделирование в очках виртуальной реальности 6 с аудионаушниками 36 момента покидания десантником ЛА, после команды «Пошел» обучаемый делает энергичный поступательный толчок левой ногой вперед при этом две стропы тросового привода 24 (за счет работы электроприводов 23) плавно подымают парашютиста на минимальное расстояние вверх. Время подъема соответствует времени стабилизированного снижения. Обучаемый получает визуальное, звуковое и динамическое сопровождение стабилизированного падения. Динамическое сопровождение заключается в импульсном вращении обучаемого вокруг своей оси с чередованием направления вращений, как по часовой, так и против хода часовой стрелки (за счет работы привода осевого вращения 32), в импульсных колебаниях в горизонтальной плоскости (за счет одновременной работы электроприводов 22 и 17).
После выдергивания звена ручного раскрытия обучаемый не ощущает динамический рывок. Синхронно с этим в очки виртуальной реальности 6 с аудионаушниками 36 проецируется среда с нераскрывающимся куполом основного парашюта. Динамическое сопровождение продолжается, при этом увеличивается амплитуда импульсных перемещений в указанных выше приводах. Результат работы обучаемого состоит в отцепке основной парашютной системы и вводе в работу запасной. Для этого обучаемый выдергивает звено ручного раскрытия (в графической части не представлено) запасного парашюта, имеющегося в конструкции ранца с подвесной системой 3. Информация об этом действии поступает через устройство регистрации положения рук в виде перчаток 37 на программно-аппаратный комплекс управляющего компьютера 1, который при правильном действии произведет передачу команды промежуточными механизмами, обеспечивающими работу тренажера и обучаемый продолжит подготовку по описанному выше алгоритму - при раскрытии основного купола парашютной системы и так далее до момента приземления.
На тренажере осуществляют отработку следующих нештатных ситуаций:
- полный отказ основой парашютной системы (при работе стабилизирующего парашюта);
- невыход основного парашюта из камеры;
- ненаполнение основного парашюта;
- несход устройства рифления;
- запутывание строп;
- порыв купола;
- самоотцеп одного свободного конца подвесной системы.
Динамическое визуальное и аудиосопровождение перечисленных особых случаев обеспечивается за счет работы приводных механизмов, описанных ранее, а также имеющейся базы видео-аудиосцен происходящего при возникновении нештатных ситуаций.
На всех режимах работы тренажера программно-аппаратный комплекс управляющего компьютера сохраняет всю полетную информацию о моделируемых вводных и о действиях парашютиста на различных этапах прыжка, которую обрабатывает и представляет преподавателю в виде готового материала для разбора.



Система пожаротушения помещения с повышенным давлением газовой среды
Мультивибратор
Устройство для проведения оксигенобаротерапии в барокамере
Проточный газовый водонагреватель
Дыхательный аппарат для проведения оксигенобаротерапии
Динамический тренажер десантников-парашютистов
Система управления поворотом транспортного средства
Траверса спуско-подъемного устройства
Способ буксировки подводной лодки
Способ повышения точности и производительности круглого наружного шлифования
Полый слиток
Устройство для установки и герметизации хвостовика обсадной колонны в скважине
Устройство для установки и герметизации хвостовика обсадной колонны в скважине
Линейный цилиндрический двигатель
Способ изготовления стержневых изделий с продольными ребрами из алюминиевых сплавов
Способ изготовления поковок в виде полусферы с горловиной
Электродуговая печь постоянного тока
Теплостойкая сталь для водоохлаждаемых изложниц
Устройство для переноса заготовок по ручьям штампа с вертикальным разъемом матриц
Четырехбойковое ковочное устройство

