Результат интеллектуальной деятельности: СТЕНД ДЛЯ ВЫРАБОТКИ УГЛОВЫХ КОЛЕБАНИЙ В ДВУХ ПЛОСКОСТЯХ
Вид РИД
Изобретение
Изобретение относится к области приборостроения, в частности к испытательному оборудованию для оценки характеристик измерительных приборов, и может быть использовано для оценки динамических погрешностей микромеханических и других малогабаритных инерциальных навигационных систем.
Известно устройство, описанное в патенте РФ №2367921. Данное устройство, предназначенное для исследования динамических характеристик малогабаритных инерциальных систем, состоит из двигателя с редуктором, соединенного с кривошипно-кулисным механизмом по каждой из двух ортогональных осей. По первой оси движение от кривошипно-кулисного механизма передается напрямую на качающуюся платформу, по второй оси кривошипно-кулисный механизм соединен с платформой через трехстепенной подшипник качения. Для измерения углов наклона платформы по каждой оси установлены датчики углового положения.
Устройство по патенту РФ №2367921 принято за прототип предлагаемого изобретения.
К недостаткам прототипа относится отсутствие стабилизации частоты колебаний, что существенно ухудшает динамические характеристики стенда.
Задачей изобретения является расширение частотного диапазона работы стенда.
Поставленная задача решается тем, что устройство, содержащее раскачивающуюся в двух плоскостях платформу, установленную на крестообразном подвесе, два двигателя с редукторами, кривошипно-кулисные механизмы и трехстепенной подшипник качения, дополнительно содержит цифровые преобразователи угловых перемещений для точного отсчета угловых положений платформы, блок силовой электроники для управления двигателями согласно сигналам, вырабатываемым при помощи программного обеспечения, установленного на управляющем компьютере. При этом появляется возможность задания частоты гармонических колебаний и их синхронизации относительно двух перпендикулярных осей.
На фиг.1 представлен общий вид стенда, где приняты следующие обозначения:
1 - раскачивающаяся платформа для установки испытываемого прибора,
2 и 3 - двигатели с редукторами по каждой из осей,
4 и 5 - кривошипно-кулисные механизмы,
6 и 7 - цифровые преобразователи угловых перемещений по каждой из осей,
8 и 9 - преобразователи угловых перемещений валов двигателей,
10 - трехстепенной подшипник качения,
11 - блок управления двигателями,
12 - управляющий компьютер с установленным на нем программным обеспечением.
Устройство работает следующим образом.
Колебания платформы 1 по гармоническому закону обеспечиваются кинематической передачей стенда, преобразующей вращательное движение валов двигателей 2, 3 в возвратно-поступательное движение платформы с помощью кривошипно-кулисных механизмов 4, 5 и трехстепенного подшипника качения 10.
Информация об угловом положении платформы 1 с цифровых преобразователей углового перемещения 6, 7 поступает в блок управления двигателями 11, соединенный с двигателями 2, 3, управляющим компьютером 12 и преобразователями угловых перемещений валов двигателей 8, 9. Блок управления двигателями 11 реализует управление путем генерации напряжений якорей двигателей 2, 3, которые формируются пропорционально-интегральными регуляторами (на фиг.1 не показаны), использующими в качестве сигналов обратной связи значения частот угловых колебаний, задаваемых с управляющего компьютера 12, и показания преобразователей углового перемещения валов двигателей 8, 9.
Параметры угловых колебаний и режим испытаний задаются оператором с помощью интерфейса пользователя, предоставляемого программным обеспечением управляющего компьютера 12.
Движение платформы 1 по гармоническому закону обеспечивается заданием частот вращения приводных двигателей Ω=z·N·f, где z - передаточное число редуктора; N - информационная емкость преобразователя угла; f - частота задаваемых колебаний платформы, [Гц].
В результате появляется возможность задания, воспроизведения и синхронизации угловых колебаний раскачивающейся платформы в двух ортогональных плоскостях, изменяющихся по гармоническому закону в расширенном частотном диапазоне.
Таким образом, вышеизложенное позволяет получить заявленный технический результат, на которое направлено изобретение, - задание, воспроизведение и синхронизация угловых колебаний раскачивающейся платформы в двух ортогональных плоскостях, изменяющихся по гармоническому закону в расширенном частотном диапазоне.
Стенд для выработки угловых колебаний в двух плоскостях, изменяющихся по гармоническому закону в расширенном частотном диапазоне, содержащий раскачивающуюся в двух плоскостях платформу, установленную на крестообразном подвесе, два двигателя с редукторами, кривошипно-кулисные механизмы, преобразующие вращательное движение двигателей в колебания платформы, и трехстепенной подшипник качения, отличающийся тем, что он дополнительно содержит систему управления движением платформы стенда, состоящую из цифровых преобразователей угловых перемещений по каждой оси, соединенных с блоком управления, соединенным с двигателями, управляющим компьютером с установленным на нем программным обеспечением и преобразователями угловых перемещений валов двигателей, реализующим управление путем генерации напряжений якорей двигателей, пропорциональных заданным частотам колебаний, формируемых пропорционально-интегральными регуляторами, использующими в качестве сигналов обратных связей значения угловых положений каждой из осей.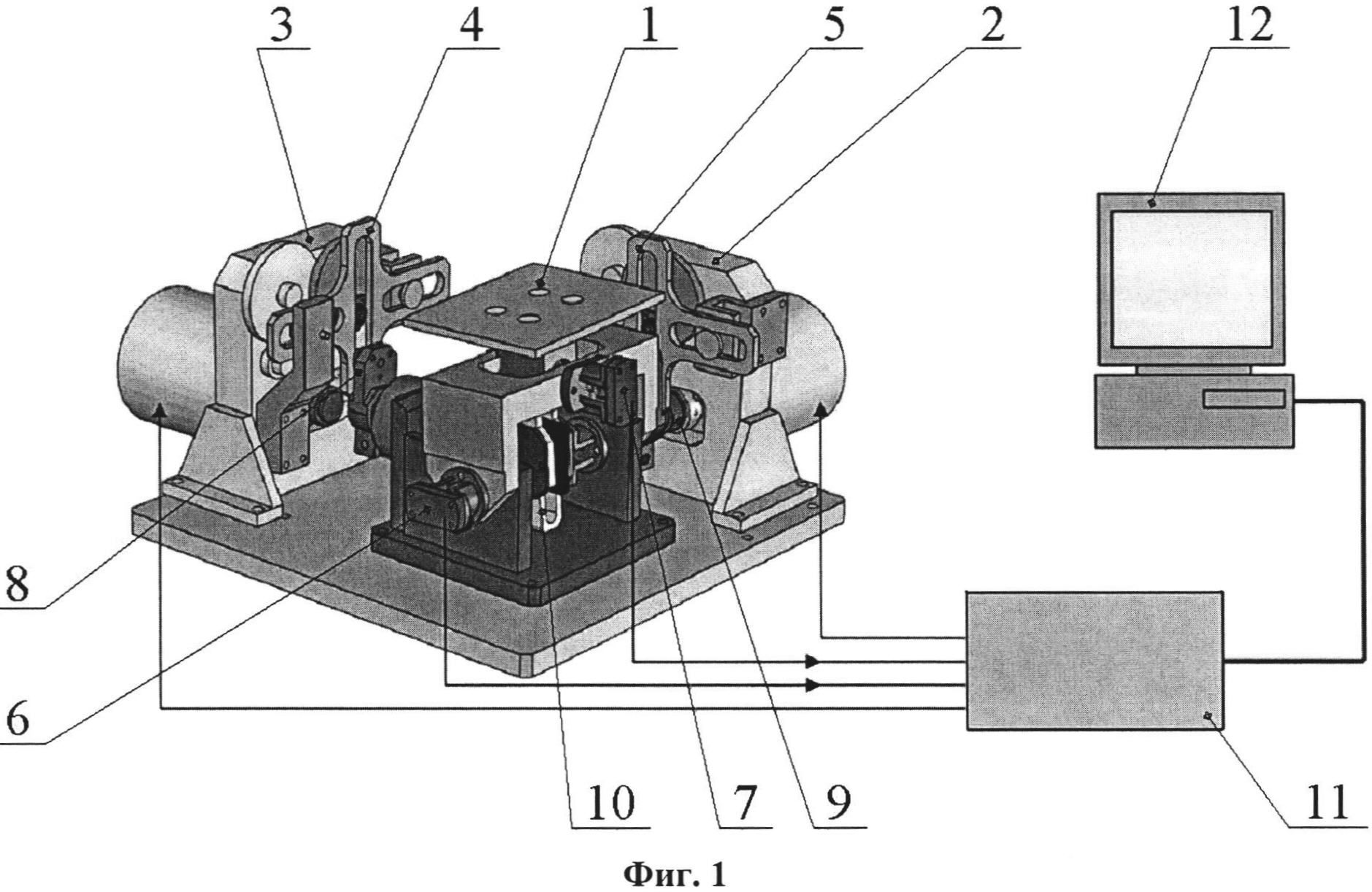
Устройство защиты от аварийной течи котла-утилизатора
Установка для окисления диоксида серы
Способ оценки динамических характеристик датчиков угловой скорости
Способ получения серной кислоты и установка для его осуществления
Способ определения динамических погрешностей микромеханических инерциальных датчиков и инерциальных измерительных модулей на их основе
Способ определения угловой скорости
Оптический кольцевой резонатор
Способ измерения физической неэлектрической величины
Способ выставки осевого зазора в газодинамическом подвесе оси вращения ротора гиромотора
Устройство для напыления тонкопленочных покрытий на сферические роторы электростатического гироскопа
Устройство защиты от аварийной течи котла-утилизатора
Установка для окисления диоксида серы
Способ оценки динамических характеристик датчиков угловой скорости
Способ получения серной кислоты и установка для его осуществления
Способ определения динамических погрешностей микромеханических инерциальных датчиков и инерциальных измерительных модулей на их основе
Способ определения угловой скорости
Оптический кольцевой резонатор
Способ измерения физической неэлектрической величины
Способ выставки осевого зазора в газодинамическом подвесе оси вращения ротора гиромотора
Устройство для напыления тонкопленочных покрытий на сферические роторы электростатического гироскопа

