Результат интеллектуальной деятельности: ЦИФРОВОЙ СЕРВОПРИВОД
Вид РИД
Изобретение
Изобретение относится к электротехнике, в частности к позиционным электроприводам постоянного тока, и может быть использовано для автоматизации металлорежущих станков, электромеханических роботов, управления аэродинамическими рулями и в других механизмах систем радиотехники, автоматики и вычислительной техники.
В настоящее время известен сервопривод (Г.И. Гульков, Ю.Н. Петренко, Е.П. Раткевич, О.Л. Симоненкова. Системы автоматизированного управления электроприводами. Учебное пособие./Под общ. ред. Ю.Н. Петренко. – Минск: ООО «Новое знание», 2004, стр. 249-251), содержащий датчик входного сигнала выход которого подключен к первому входу измерителя рассогласования, второй вход которого подсоединен к выходу датчика положения, а выход ко входу управления преобразователя, соединенного с электродвигателем, связанным с исполнительным органом, на котором установлен датчик положения.
Недостатком известного устройства является низкая надежность в связи с тем, что электропривод в заданном положении теряет устойчивость и переходит в режим автоколебаний, обусловленных наличием различных механических факторов, что приводит к перегреву обмоток электродвигателя сервопривода.
Наиболее близким к предлагаемому является цифровой сервопривод (Труды ФГУП «НПЦАП». Системы и приборы управления. - Научно-технический журнал, №4, 2012 г.), содержащий датчик входного сигнала выход которого подключен к первому входу измерителя рассогласования, второй вход которого подсоединен к выходу датчика положения, а выход - ко входу компаратора, соединенного через драйвер электродвигателя и механический редуктор с исполнительным органом, на котором установлен датчик положения.
Недостатком известного устройства является низкая надежность в связи с тем, что электропривод в заданном положении теряет устойчивость и переходит в режим автоколебаний, обусловленных наличием различных механических факторов (моментом инерции исполнительного органа, люфтов в редукторе и т.п.) при постоянной величине зоны нечувствительности цифрового компаратора в контуре управления, что приводит к перегреву обмоток электродвигателя сервопривода.
Задачей изобретения является повышение надежности сервопривода.
Поставленная задача достигается тем, что для исключения перегрева обмоток электродвигателя сервопривода, вызванных потерей устойчивости сервопривода и переходом в режим автоколебаний при наличии различных механических факторов (моментом инерции исполнительного органа, люфтов в редукторе и т.п.) при постоянной величине зоны нечувствительности цифрового компаратора в контуре управления, согласно изобретению цифровой компаратор снабжен блоком задания зоны нечувствительности, вход которого соединен с выходом цифрового компаратора через детектор автоколебаний, состоящий из соединенных последовательно первого логического блока «И», первого счетчика и первого счетного триггера, выход которого соединен со входом блока задания зоны нечувствительности и с первым входом первого логического блока «И», второй вход которого соединен с выходом цифрового компаратора и со входом инвертора, выход которого подключен к входам сброса второго счетного триггера и второго счетчика, подключенного счетным входом к выходу второго логического блока «И», первый и второй входы которого подключены соответственно к выходу генератора тактовой частоты и к выходу второго счетного триггера, соединенного со входами сброса первого счетного триггера и первого счетчика.
Блок задания зоны нечувствительности, например, может представлять собой несколько коммутируемых источников опорных сигналов, соответствующих требуемым величинам зоны нечувствительности.
Детектор автоколебаний предназначен для выявления наличия автоколебаний в тракте управления приводом и формирования соответствующей команды, поступающей на вход блока задания зоны нечувствительности.
Сущность изобретения поясняется чертежами, где:
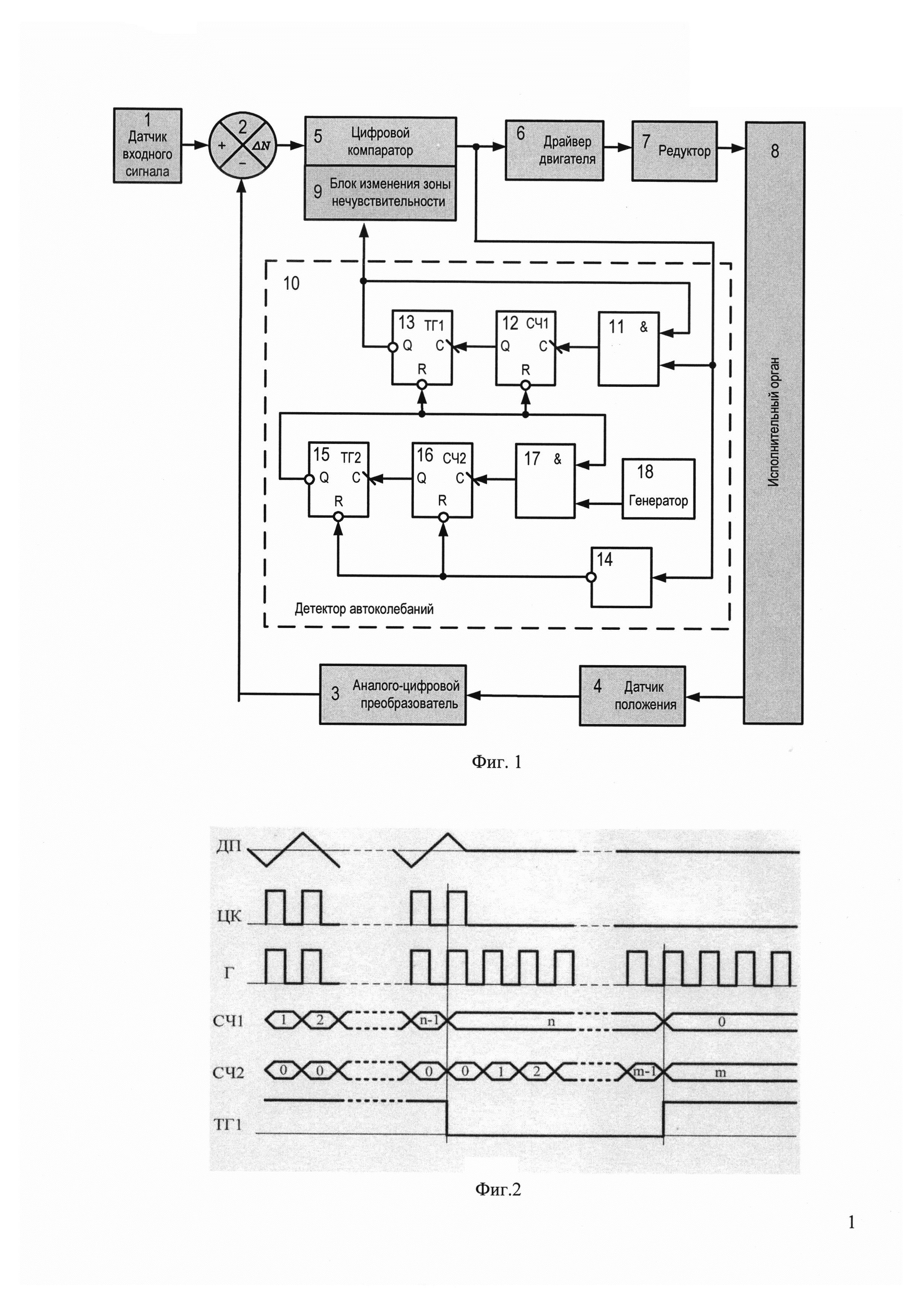
на фиг. 1 приведена схема сервопривода, а на фиг. 2 - диаграммы напряжений на элементах устройства:
ДП - выход датчика положения 4,
ЦК - выход цифрового компаратора 5,
Г - выход генератора 18,
СЧ1, СЧ2 - цифровые выходы первого 12 и второго 16 счетчика,
ТГ1 - выход первого триггера 13, нулевому значению которого соответствует расширение зоны нечувствительности
Сервопривод содержит датчик входного сигнала 1, выход которого подключен к первому входу измерителя рассогласования 2, второй вход которого подсоединен через аналого-цифровой преобразователь 3 к выходу датчика положения 4, а выход - ко входу цифрового компаратора 5, соединенного через драйвер электродвигателя 6 и механический редуктор 7 с исполнительным органом 8, на котором установлен датчик положения 4, при этом цифровой компаратор 5 снабжен блоком задания зоны нечувствительности 9, вход которого соединен с выходом цифрового компаратора 5 через детектор автоколебаний 10, состоящий из соединенных последовательно первого логического блока «И» 11, первого счетчика 12 и первого счетного триггера 13, выход которого соединен со входом блока задания зоны нечувствительности 9 и с первым входом первого логического блока «И» 11, второй вход которого соединен с выходом цифрового компаратора 5 и со входом инвертора 14, выход которого подключен к входам сброса второго счетного триггера 15 и второго счетчика 16, подключенного счетным входом к выходу второго логического блока «И» 17, первый и второй входы которого подключены соответственно к выходу генератора тактовой частоты 18 и к выходу второго счетного триггера 15, соединенного со входами сброса первого счетного триггера 13 и первого счетчика 12.
Рассмотрим работу устройства.
В установившемся режиме на вход измерителя рассогласования 2 приходит управляющий сигнал с датчика входного сигнала 1, соответствующий требуемому углу положения сервопривода. На второй вход измерителя рассогласования 2 приходит сигнал с датчика положения 4 после преобразования в аналого-цифровом преобразователе 3, соответствующий текущему положению исполнительного органа 8. С выхода измерителя рассогласования 2 на вход цифрового компаратора 5 приходит арифметическая разность сигналов, которая сравнивается с величиной сигнала, заданной блоком изменения зоны нечувствительности 9. Сигнал, соответствующий результату сравнения, с выхода цифрового компаратора 5 поступает на вход драйвера электродвигателя 6, который через механический редуктор 7 приводят в движение исполнительный орган 8 и датчик положения 4. Из-за различных механических возмущающих факторов, в том числе, например, из-за износа редуктора, возможно возникновение автоколебаний, вследствие которых при неименном сигнале с датчика входного сигнала 1 происходит постоянное движение исполнительного органа 8 в окрестностях заданного положения, с датчика положения 4 на вход измерителя рассогласования 2 приходит сигнал, соответствующий периодическому изменению положения исполнительного органа 8 с частотой автоколебаний. На выходе цифрового компаратора 5 формируется сигнал смены направления, частота которого соответствует частоте автоколебаний. Сигналы смены направления движения с цифрового компаратора 5 через первый логический блок «И» 11 приходят на счетный вход первого счетчика СЧ1 12. Когда код на выходе первого счетчика СЧ1 12 достигнет максимального значения, равного заданному числу полупериодов автоколебаний, на его выходе сформируется сигнал, который поступает на счетный вход первого триггера ТГ1 13. На выходе первого триггера ТГ1 13 сформируется сигнал, который поступает на вход блока изменения зоны нечувствительности 9 и на первый вход первого логического блока «И» 11, в результате чего остановится работа первого счетчика СЧ1 12. Блок изменения зоны нечувствительности 9 по сигналу с первого триггера ТГ1 13 увеличит зону нечувствительности, вследствие чего автоколебания прекращаются.
С целью обеспечения работы детектора автоколебаний 10 только при частоте, выше частоты с выхода датчика управляющего сигнала 1, применен второй счетчик СЧ2 16, на счетный вход которого через второй логический блок «И» 17 приходит тактовая частота с генератора Г 18. После заполнения второго счетчика СЧ2 16 до некоторого значения М, рассчитанного по формуле:
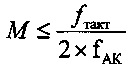
где fАК - минимальная частота автоколебаний;
fтакт - тактовая частота (частота дискретизации) генератора Г 18, она определяется по теореме Котельникова 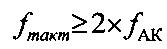 ,
,
на его выходе сформируется сигнал, который придет на счетный вход второго триггера ТГ2 15. На инверсном выходе второго триггера ТГ2 15 сформируется сигнал, который придет на вход второго логического элемента «И» 17 и остановит работу второго счетчика СЧ2 16, а также приведет в исходное состояние первый счетчик СЧ1 12 и первый триггер ТГ1 13. На выходе первого триггера ТГ1 13 сформируется сигнал, по которому блок изменения зоны нечувствительности 9 уменьшит зону изменения нечувствительности. Сброс второго счетчика СЧ2 16 и второго триггера ТГ2 15 осуществляется через инвертор 14 по сигналу смены направления движения.
Техническим результатом от использования предлагаемого технического решения является повышение надежности сервопривода путем исключения перегрева обмоток электродвигателя, обусловленного потерей устойчивости управления сервоприводом в заданной точке позиционирования вследствие воздействия различных механических возмущающих факторов, например, из-за износа рабочих поверхностей механической части редуктора.
Сервопривод, содержащий датчик входного сигнала, выход которого подключен к первому входу измерителя рассогласования, второй вход которого подсоединен через аналого-цифровой преобразователь к выходу датчика положения, а выход - ко входу цифрового компаратора, соединенного через драйвер электродвигателя и механический редуктор с исполнительным органом, на котором установлен датчик положения, отличающийся тем, что с целью повышения надежности цифровой компаратор снабжен блоком задания зоны нечувствительности, вход которого соединен с выходом цифрового компаратора через детектор автоколебаний, состоящий из соединенных последовательно первого логического блока «И», первого счетчика и первого счетного триггера, выход которого соединен со входом блока задания зоны нечувствительности и с первым входом первого логического блока «И», второй вход которого соединен с выходом цифрового компаратора и со входом инвертора, выход которого подключен к входам сброса второго счетного триггера и второго счетчика, подключенного счетным входом к выходу второго логического блока «И», первый и второй входы которого подключены соответственно к выходу генератора тактовой частоты и к выходу второго счетного триггера, соединенного со входами сброса первого счетного триггера и первого счетчика.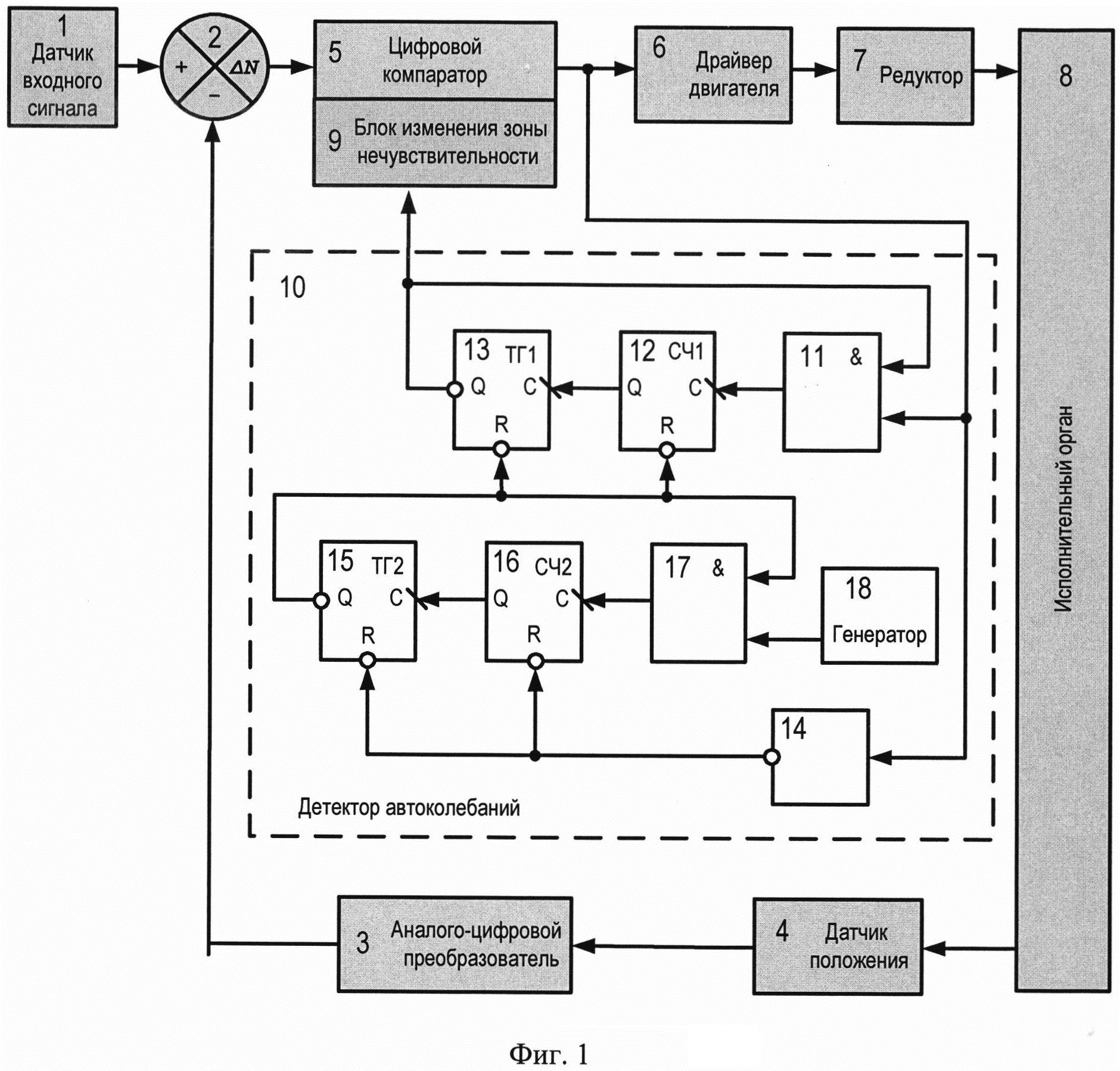
Способ стабилизации структурно неустойчивого осциллятора жидкости разгонных блоков и верхних ступеней ракет-носителей
Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей
Способ управления программным разворотом разгонного блока
Способ компенсации потери тяги двигателями ориентации разгонного блока
Перестраиваемое мажоритарное устройство
Устройство для формирования установочного импульса
Способ изготовления склеивающей прокладки
Сервопривод

