Результат интеллектуальной деятельности: Способ управления беспилотным летательным аппаратом и блок рулевых приводов для его осуществления
Вид РИД
Изобретение
Предлагаемые изобретения относятся к авиационной технике и могут быть использованы в управляемых ракетах, снарядах, бомбах и других беспилотных летательных аппаратах ЛА.
Известен способ управления беспилотными ЛА, получивший название аэродинамического, в котором регулирование вектора скорости (подъемной силы) осуществляется изменением углового положения рулевых аэродинамических поверхностей, изменяющих лобовое сопротивление набегающему потоку и создающих крутящий момент относительно центра массы, при этом изменение углового положения аэродинамических поверхностей осуществляется рулевыми машинками рулевых приводов по сигналам управления и за счет потребления энергии от силового источника энергии [1].
В способах управления, принятых за аналоги, используются электрические, гидравлические или пневматические рулевые приводы и автономные источники энергии (аккумуляторные батареи, баллоны сжатого газа).
Недостатком способов аналогов является ограниченность времени их работы по управлению полетом, обусловленная конкретным запасом энергии силового источника рулевых приводов.
Наиболее близким к заявляемому способу управления полетом (принятым за прототип) является способ управления, в котором в отличие от аналогов для управления приводами в качестве силового источника энергии используется энергия набегающего потока воздуха ([2] рис. 8, 10 стр. 140; [3]).
В способе управления полетом беспилотного ЛА, принятом за прототип, набегающий поток, попадающий в воздухозаборники, перераспределяется с помощью согнала управления в рабочие полости рулевых машинок, в которых потенциальная энергия набегающего потока преобразуется в механическую энергию поворота рулевых аэродинамических поверхностей.
В существующих рулевых машинках используемая потенциальная энергия набегающего потока определяется давлением тормозящего потока, зависящего от скорости полета и плотности воздуха:
Епот=Fh=pSh;
 ,
,
где Епот - используемая потенциальная энергия потока,
F – сила, действующая на поршень рулевой машинки,
h - ход поршневой рулевой машинки,
S - площадь поршня,
р - давление торможения набегающего потока,
ρ - плотность воздуха,
ϕ - коэффициент, характеризующий воздухозаборник,
V0 - скорость потока, равная скорости беспилотного ЛА.
Недостаток указанного способа управления заключается в ограниченности применения из-за невозможности функционирования на малых скоростях полета и на высотах с малой плотностью воздуха. Кроме того, использование для работы рулевых приводов давления торможения набегающего потока не позволяет эффективно использовать имеющуюся энергию потока.
В качестве прототипа блока рулевых приводов по совокупности существенных принципов и достигаемому эффекту выбран «Хвостовой отсек воздушно-динамических рулевых приводов» (Патент RU 2418261 [3]), содержащий корпус блока с рулевыми аэродинамическими поверхностями, внутри каждой из которых имеются каналы воздухозаборника и сброса воздуха и рулевой привод, состоящий из блока управления, рулевой поршневой машинки и маломощного источника питания в виде аккумуляторной батареи, которая может быть использована только для блока управления рулевых приводов или являться составной частью системы управления. В последнем случае она располагается в корпусе блока вне аэродинамической поверхности, как это выполнено в прототипе.
Целью заявленных изобретений является: повышение эффективности способа управления блоком рулевых приводов, реализация которого расширяет функциональные возможности беспилотного ЛА, т.е. обеспечивает ее работоспособность на малых скоростях полета и на больших высотах с повышенной эффективностью энергопотребления рулевыми приводами набегающего потока, что и расширяет область применения беспилотного ЛА.
Решения поставленной задачи в способе управления беспилотным ЛА достигается тем, что регулирование направления вектора скорости (подъемной силы) путем изменений лобового сопротивления набегающему потоку и величины вектора тяги струи сброса осуществляется внутри аэродинамических поверхностей изменением кинетической энергии (скорости) набегающего потока, в соответствии с сигналом управления, так, что при положительном сигнале управления энергия потока (скорость) увеличивается, лобовое сопротивление уменьшается, а величина вектора тяги струи сброса увеличивается, при отрицательном сигнале управления энергия потока (скорость) уменьшается, лобовое сопротивление увеличивается, а величина вектора тяги струи сброса уменьшается, и при отсутствии сигнала управления энергия потока, лобовое сопротивление и величина вектора тяги струи сброса остаются постоянными и одинаковыми, при этом регулирование величин лобовых сопротивлений и векторов тяги струй сброса достигаются рулевыми приводами за счет энергии аккумуляторной батареи, подзаряжаемой рулевыми приводами от набегающего потока в горизонтальном полете.
Использование подзарядки аккумуляторной батареи рулевыми приводами существенно увеличивает дальность полета и позволяет рулевым приводам управлять беспилотным ЛА на малых скоростях и на больших высотах.
Решение поставленной задачи предлагаемым устройством блока рулевых приводов достигается тем, что, рулевой привод выполнен из блока системы управления одной или набора рулевых машинок, расположенных последовательно или параллельно, каждая из которых выполнена в виде коаксиально расположенных электродвигателя и турбинки, при этом использован электродвигатель бесколлекторный с наружным ротором, на который насажена турбинка, к которой подведены каналы воздухозаборника и сброса воздуха, в качестве аккумуляторной батареи использована батарея с подзарядкой, клеммы которой через блок системы управления соединены с обмоткой электродвигателя, при использовании одной или несколько последовательно расположенных рулевых машинок, канал воздухозаборника и сброса воздуха выполнен в виде плоской щели, внутри аэродинамической поверхности, при использовании двух рулевых машинок, расположенных параллельно, каналы воздухозаборника и сброса воздуха выполнены в виде щелей, образованных между плоскостями аэродинамической поверхности и кожухами, расположенными параллельно плоскостям аэродинамической поверхности.
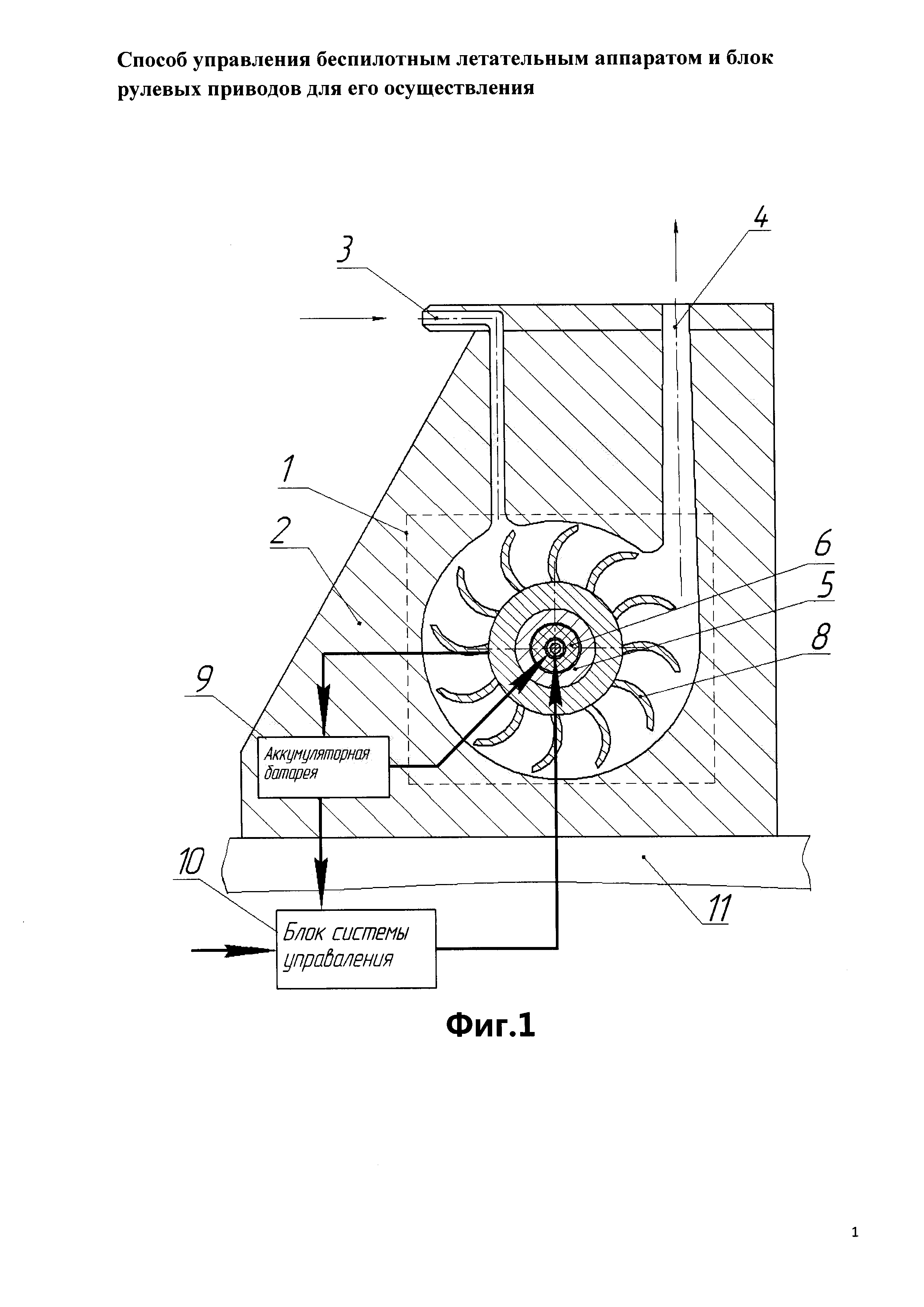
На Фиг. 1 приведена функциональная схема, поясняющая предлагаемый способ управления беспилотным ЛА.
На Фиг. 2 приведен вариант конструктивной схемы в виде продольного сечения аэродинамической поверхности с рулевым приводом, в котором канал воздухозаборника выполнен в виде щели на передней кромке аэродинамической поверхности.
На Фиг. 3 приведено увеличенное сечение А-А Фиг. 2.
На Фиг. 4 приведен вариант конструктивной схемы продольного сечения аэродинамической поверхности с двумя рулевыми приводами, расположенными последовательно.
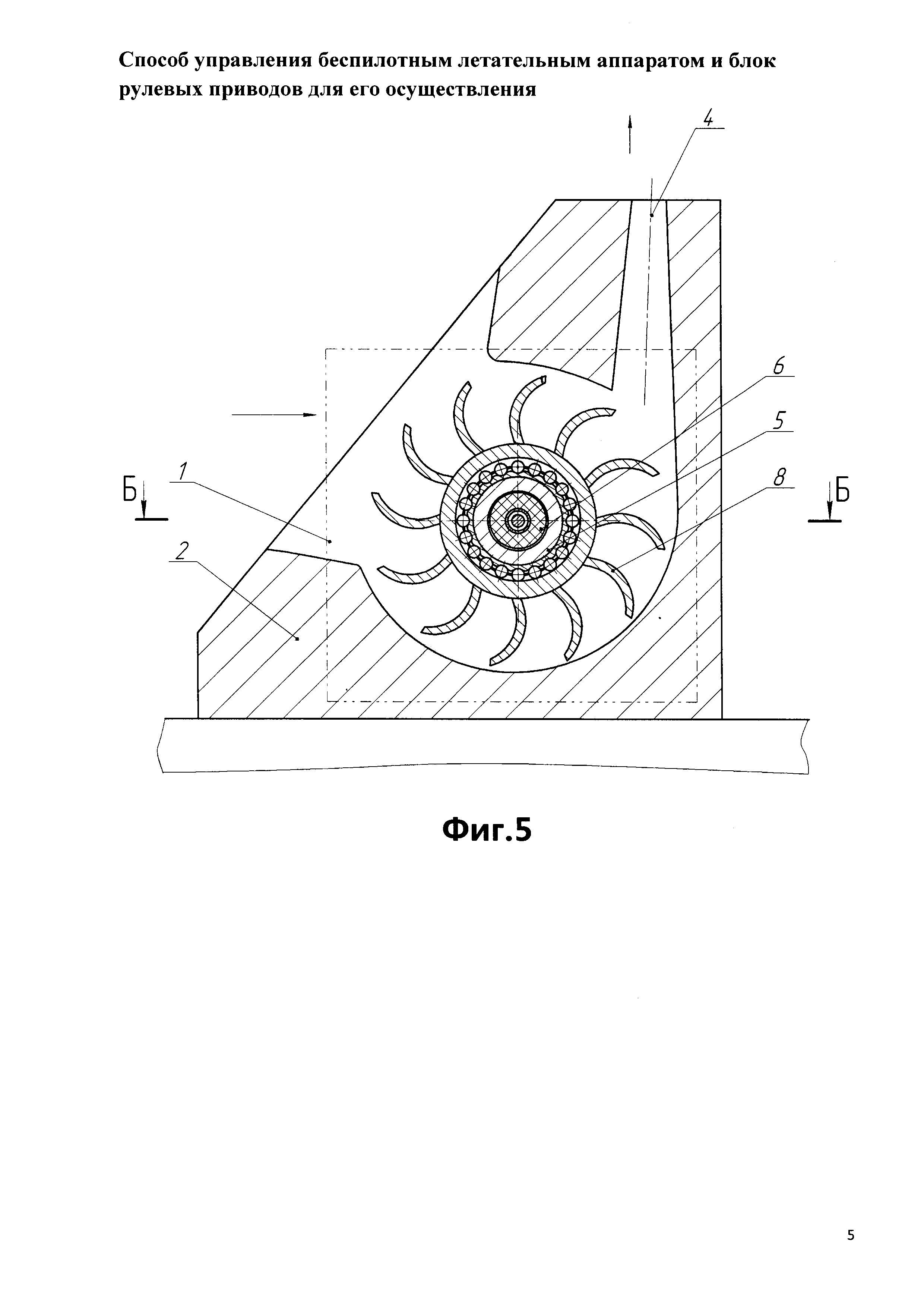
На Фиг. 5 приведен вариант конструктивной схемы аэродинамической поверхности с рулевыми приводами, расположенными параллельно при снятом кожухе.
На Фиг. 6 приведен поперечный разрез аэродинамической поверхности с двумя рулевыми приводами, расположенными параллельно, и воздухозаборником, выполненным в виде щелей, образованных плоскостями аэродинамической поверхности и кожухами, расположенными параллельно плоскостям аэродинамической поверхности.
Предложенный способ управления заключается в (см. фиг. 1):
- отборе энергии от набегающего потока воздуха воздухозаборниками,
- задействовании аккумуляторной батареи 9 и блока системы управления (БСУ) 10,
- формировании БСУ 10 сигналов управления приводами аэродинамических поверхностей 1,
- преобразовании рулевыми приводами 1 кинетической энергии набегающего потока в энергию вращения выходных звеньев рулевых приводов, которые работают в режиме рекуперации кинетической энергии набегающего потока, в электрическую энергию и подзаряжают аккумуляторную батарею,
- по сигналу управления от БСУ 10 рулевые привода преобразуют электрическую энергию аккумуляторной батареи 9 в крутящий момент на выходном звене, соответствующий величине и знаку сигнала управления,
- суммарный момент от энергий входного набегающего потока и рулевого привода ускоряет или тормозит поток воздуха внутри аэродинамической поверхности 2, жестко закрепленной на корпусе 11,
- в зависимости от сигналов управлении, формируемых БСУ 10, каждый рулевой привод 1 создает определенную скорость потока воздуха внутри аэродинамической поверхности 2, которой соответствует лобовое сопротивление, величина вектора тяги струи сброса и поворотный момент относительно центра массы, создаваемые этой аэродинамической поверхностью, и изменение направление вектора скорости беспилотного ЛА относительно вектора тяги.
Заявленный способ управления беспилотного ЛА заключается в регулировании вектора скорости (подъемной силы) рулевыми приводами, расположенными внутри неподвижных аэродинамических поверхностей, путем изменения кинетической энергии (скорости) набегающего потока в соответствии с сигналом управления и энергии от аккумуляторной батареи.
При отсутствии сигналов управления на рулевых приводах во всех каналах воздухозаборников аэродинамических поверхностей скорость набегающего потока V0 будет зависеть от скорости полета беспилотного ЛА.
Кинетическая энергия потока выражается зависимостью:
 ,
,
где m - масса используемого воздуха,
S - площадь сечения канала,
ρ - плотность воздуха,
t - время рабочего цикла массы воздуха,
V0 - скорость потока, равная скорости полета беспилотного ЛА.
В горизонтальном полете при одинаковой скорости V0 во всех аэродинамических поверхностях направление вектора скорости беспилотного ЛА (подъемная сила) будет совпадать с направлением вектора тяги. При этом приводы работают в генераторном режиме и заряжают аккумуляторную батарею. При подаче положительного сигнала управления на один из рулевых приводов последний будет работать как двигатель (насос) и увеличивать скорость потока и его энергию:
V1=V0+k1V0;
Ek1=Ek0+k2Ek0,
где k1, k2 - коэффициенты, характеризующие скоростные характеристики насоса и потока. В результате с увеличением скорости потока лобовое сопротивление аэродинамической поверхности уменьшается, величина вектора тяги струй сброса увеличивается и вектор скорости изменит свое положение относительно вектора тяги.
При подаче отрицательного сигнала управления на один из рулевых приводов, привод будет работать как тормоз, создавая сопротивление набегающему потоку, тормозя его:
V2=V0-k1V0;
Ek1=Ek0-k2Ek0,
Уменьшение скорости потока в канале воздухозаборника увеличивает лобовое сопротивление аэродинамической поверхности, уменьшает величину вектора тяги струи сброса и приводит к отклонению вектора скорости (подъемной силы) относительно вектора тяги в противоположную сторону относительно вектора направления при положительном сигнале.
Подавая сигналы управления на рулевые приводы в определенной последовательности, можно изменять направление вектора скорости беспилотного ЛА (подъемной силы) в нужном направлении в зависимости от геометрической суммы векторов сил лобовых сопротивлений и величин векторов тяги струй сброса, создаваемых каждой рулевой поверхностью, и изменения величины вектора тяги струи сброса.
Устройство рулевого привода в одной из аэродинамических поверхностей блока рулевых приводов изображено на фиг. 2 и 3. Рулевой привод 1, встроенный в аэродинамическую поверхность 2, содержит канал воздухозаборника 3, электродвигатель, состоящий из ротора 5 и статора 6, на роторе которого может быть установлен мультипликатор 7 на основе волновой передачи с телами качения. При отсутствии мультипликатора 7 турбинка 8 размещается непосредственно на роторе 5 электродвигателя. К турбинке 8 подведены канал воздухозаборника 3 и канал сброса 4.
Воздухозаборник 3 выполнен по типу воздухозаборников тангенциальных вентиляторов - широким в плоскости, где происходит забор воздуха в атмосфере и сужающимся по мере приближения к турбинке.
На фиг. 4 изображен вариант выполнения рулевого привода 1, отличающийся от фиг. 2 и фиг. 3 тем, что в корпусе привода 1, расположенного в аэродинамической поверхности 2, размещены последовательно два исполнительных механизма.
На фиг. 5 и фиг. 6 приведен вариант выполнения рулевого привода 1, с двумя параллельно расположенными исполнительными механизмами и воздухозаборника 3, выполненного в виде щелей, образованных двумя кожухами 12, которые увеличивают площадь канала воздухозаборника 3 и расход воздуха. Предложенная компоновка расширяет функциональные возможности работы без дополнительных сопротивлений истечению газа.
Предложенные конструктивные схемы работают следующим образом. Поток воздуха из воздухозаборника 3 по воздухопроводу подается на турбинку 8, закрепленную на роторе двигателя 6. При достаточной скорости набегающего потока, отсутствии маневра и, как следствие, отсутствии управляющего сигнала, турбинка 8 будет приводиться во вращение набегающим потоком воздуха, двигатель будет работать в генераторном режиме, заряжая аккумуляторную батарею. В случае, если скорость набегающего потока недостаточна для создания управляющего усилия (запуск или совершение маневра) и при наличии положительного сигнала управления, двигатель будет раскручивать турбинку 8, увеличивая расход воздуха внутри аэродинамической поверхности, одновременно с этим будет уменьшаться лобовое сопротивление и увеличиваться величина вектора тяги струи сброса. При достижении скорости потока необходимого значения и совершении маневра, с одновременной подачей отрицательного управляющего сигнала, турбинка 8 будет тормозиться, уменьшая набегающий поток воздуха, затормаживая его, тем самым увеличивая лобовое сопротивление и уменьшая величину вектора тяги струи сброса.
Изменяя лобовое сопротивление и величину вектора тяги струи сброса, осуществляется регулирование направления вектора и управление полетом беспилотного ЛА.
В случае применения мультипликатора 7 на основе волновой передачи с телами качения двигатель будет раскручивать турбинку 8 с большей скоростью.
Таким образом, заявленный способ управления беспилотным ЛА заключается в регулировании лобового сопротивления и величины вектора тяга струй сброса рулевыми приводами, расположенными внутри неподвижных аэродинамических поверхностей, путем использования кинетической энергии набегающего потока и изменения ее величины за счет энергии подзаряжаемой аккумуляторной батареи. Заявленный способ управления повышает эффективность энергопотребления привода, т.к. используемая кинетическая энергия набегающего потока пропорциональна скорости потока в кубе, в то время как используемая в прототипе потенциальная энергия зависит от скорости потока только в квадрате. Кроме того, использование энергии подзаряжаемой рулевыми приводами аккумуляторной батареи позволяет управлять вектором скорости (подъемной силой) на малых скоростях и на больших высотах, что расширяет функциональные возможности боевого применения беспилотного ЛА.
Заявленный блок рулевых приводов, содержащий жестко закрепленные аэродинамические поверхности, внутри которых расположены рулевые приводы с рулевыми машинками, содержащими пневматический двигатель динамического действия - турбинку, использующую кинетическую энергию набегающего потока, возможно редуктор на основе волновых передач с телами качения и электрический двигатель, расположенный внутри турбинки, выполняют функции турбонасоса, что делает конструкцию простой, компактной и дешевой.
Расположение одной рулевой машинки или расположение нескольких машинок последовательно или параллельно позволяет их унифицировать для использования в беспилотных ЛА различного назначения, что существенно сократит их стоимость.
Источники информации
1. Костин С.В., Петров Б.И., Гамынин Н.С. Рулевые приводы. М.: Машиностроение, 1973. - 205 с.
2. Ветров В.В., Грязев Д.А. и др. Основы устройства и функционирования противотанковых управляемых ракет. Под общей редакцией А.Г. Шепунова. Изд-во Тул. ГУ, Тула 2006 г. - 256 стр.
3. Гусев А.В., Евтеев К.П., Фимушкин B.C. Патент №2288439. Класс В64С 13/40, F42B 10/60, F42B 15/00. Способ управления ракетой и блок рулевого привода (варианты). Опубл. 27.11.2006.
4. Бабушкин Д.П., Евтеев К.П., Кривов И.А., Кузнецов М.Ю., Никаноров Б.А., Плещеев И.Е., Фимушкин B.C., Храпов А.В. Патент №2418261. Класс F42B 25/00, F15B 15/00. Хвостовой отсек воздушно-динамических рулевых приводов для управляемых летательных аппаратов (преимущественно для управляемых авиационных бомб) и пневмодвигатель рулевого привода. Опубл. 10.05.2011.

Способ пропорционального управления воздушно-динамическим рулевым приводом ракеты и устройство для его реализации
Хвостовой отсек воздушно-динамических рулевых приводов для управляемых летательных аппаратов (преимущественно для управляемых авиационных бомб) и пневмодвигатель рулевого привода
Рулевая машина управляемого снаряда
Автоколебательный рулевой привод вращающейся по крену управляемой ракеты
Ракета и привод механизма разделения ступеней ракеты
Гиперзвуковая управляемая ракета
Способ инициирования бортовых систем управляемого снаряда и импульсный магнитоэлектрический генератор для его осуществления (варианты)
Управляемая пуля
Управляемая пуля
Способ и устройство инициирования воздушно-динамического рулевого привода управляемой авиабомбы, способ проверки готовности воздушно-динамического рулевого привода перед сбросом управляемой авиабомбы, воздушно-динамический рулевой привод и аппаратура управления воздушно-динамическим рулевым приводом авиабомбы
Отсек рулевого привода управляемой ракеты

