Результат интеллектуальной деятельности: АВТОМАТИЗИРОВАННЫЙ КОРАБЕЛЬНЫЙ КОМПЛЕКС СВЕТОСИГНАЛЬНОЙ СВЯЗИ
Вид РИД
Изобретение
Настоящее изобретение относится к области электротехники и связи и может быть использовано для организации корабельной светосигнальной связи.
Научно-технический прогресс, расширение международной торговли, рыболовства, а также необходимость укрепления защиты морских рубежей способствуют развитию судо- и кораблестроения, а также их отдельных систем и приборов и береговых объектов. На флоте постоянно совершенствуются системы связи, причем не только радиосвязи как обладающей высокой надежностью, но и оптической корабельной светосигнальной. Последняя не подвержена преднамеренным помехам, устойчиво работает в условиях магнитных бурь и имеет высокую скрытность. Создание системы оптической связи к тому же выгодно экономически: капитальные вложения в ее создание и внедрение значительно ниже, чем в систему радиосвязи.
Известны различные типы светосигнальных ламповых прожекторов для обеспечения безаварийного кораблевождения в темное время суток, а также для световой сигнализации проблесками белого света по коду Морзе и освещения рабочих мест рассеянным светом, например Авторское свидетельство СССР №1173128, 1983 г. Судовой светосигнальный прибор, содержащий корпус с установленной в нем прожекторной лампой переменного тока, металлические жалюзи и рукоятку управления жалюзи, позволяющими перекрывать световой поток для передачи сигналов кода Морзе. МСНП-125 ТУ 16-545364-81. МСНП-250М; МСП-150; МСП-л45/2; «Проблеск»; К-35-Л и др.
На практике флагманскому кораблю оперативного соединения для управления силами одновременно, как правило, требуется передача сигналов сразу нескольким кораблям. Для одновременной передачи сообщений сразу всем кораблям в ночное время используется направленный клотиковый сигнальный фонарь небольшой мощности. В дневное время одновременная передача сигналов всем кораблям невозможна. Поскольку задержка в приеме сообщений может иметь серьезные последствия в тактических ситуациях, необходима разработка мощного кругового излучения, работающего в дневное время [Катанович А.А. Оптоэлектронная техника в корабельных светосигнальных системах связи ВМФ // Судостроение. - 2002. - №1. - С. 27-39].
Известно также судовое осветительное устройство. Авторское свидетельство СССР №1516607, 1989, содержащее корпус с защитным стеклом, отражатель, источник питания, датчик кода Морзе и источник света.
Наиболее близким по назначению, технической сущности и положительному эффекту к заявляемому устройству является Автоматизированный корабельный комплекс светосигнальной связи. Заявка на изобретение №2015117769 от 12.05.2015 г. кл. E21L 11/00.
Автоматизированный корабельный комплекс светосигнальной связи состоит из прибора оптической связи направленного действия, прибора оптической связи всенаправленного действия и блока электропитания от бортовой сети корабля, при этом автоматизированное рабочее место оператора, состоит из вычислительного устройства, соединенного со средствами отображения информации, органами ввода и вывода информации и интерфейсных средств внешней связи, а прибор оптической связи направленного действия состоит из блока формирования и выдачи оптических сигналов, выполнен со встроенной светодиодной матрицей и соединен с блоком приема и преобразования оптических сигналов и блоком наведения, слежения и стабилизации который соединен с блоком управления, обработки и сопряжения который, в свою очередь, соединен с блоком электропитания, причем автоматизированное рабочее место оператора радиально соединено с общекорабельной системой стабилизации качки корабля, автоматизированной системой управления кораблем, прибором оптической связи направленного действия и прибором оптической связи всенаправленного действия,
Общими недостатками как аналогов, так и прототипа являются низкие эксплуатационные характеристики, большие массогабаритные показатели, а также недостаточная надежность, так как он имеет трущиеся механические элементы.
Целью изобретения является уменьшение массогабаритных показателей и повышение надежности комплекса.
Поставленная цель достигается тем, что автоматизированный корабельный комплекс светосигнальной связи, состоящий из прибора оптической связи направленного действия, прибора оптической связи всенаправленного действия и блока электропитания от бортовой сети корабля, при этом автоматизированное рабочее место оператора состоит из вычислительного устройства, соединенного со средствами отображения информации, органами ввода и вывода информации и интерфейсных средств внешней связи, а прибор оптической связи направленного действия состоит из блока формирования и выдачи оптических сигналов, выполнен со встроенной светодиодной матрицей и соединен с блоком приема и преобразования оптических сигналов и блоком наведения, слежения и стабилизации, который соединен с блоком управления, обработки и сопряжения который, в свою очередь, соединен с блоком электропитания, причем автоматизированное рабочее место оператора радиально соединено с общекорабельной системой стабилизации качки корабля, автоматизированной системой управления кораблем, прибором оптической связи направленного действия и прибором оптической связи всенаправленного действия, при этом блок наведения, слежения и стабилизации выполнен из четырех ячеек, ячейки управления, двух ячеек с силовыми модулями по одной на каждую обмотку электродвигателя и ячейки конденсаторов, при этом ячейка управления включает в себя микропроцессор ATMega 128, ПЛИС ALTERA и два высокоскоростных АЦП для преобразования сигналов от датчика тока, причем ячейка связана с датчиком азимута и управляющим компьютером по интерфейсу RS-422, а ячейка силового модуля включает в себя ключи на основе IGBT транзисторов, допускающих ток коммутации 50 А и напряжение до 1200 В, и датчик тока, измеряющий ток через обмотку электродвигателя и обеспечивающий обратную связь по току.
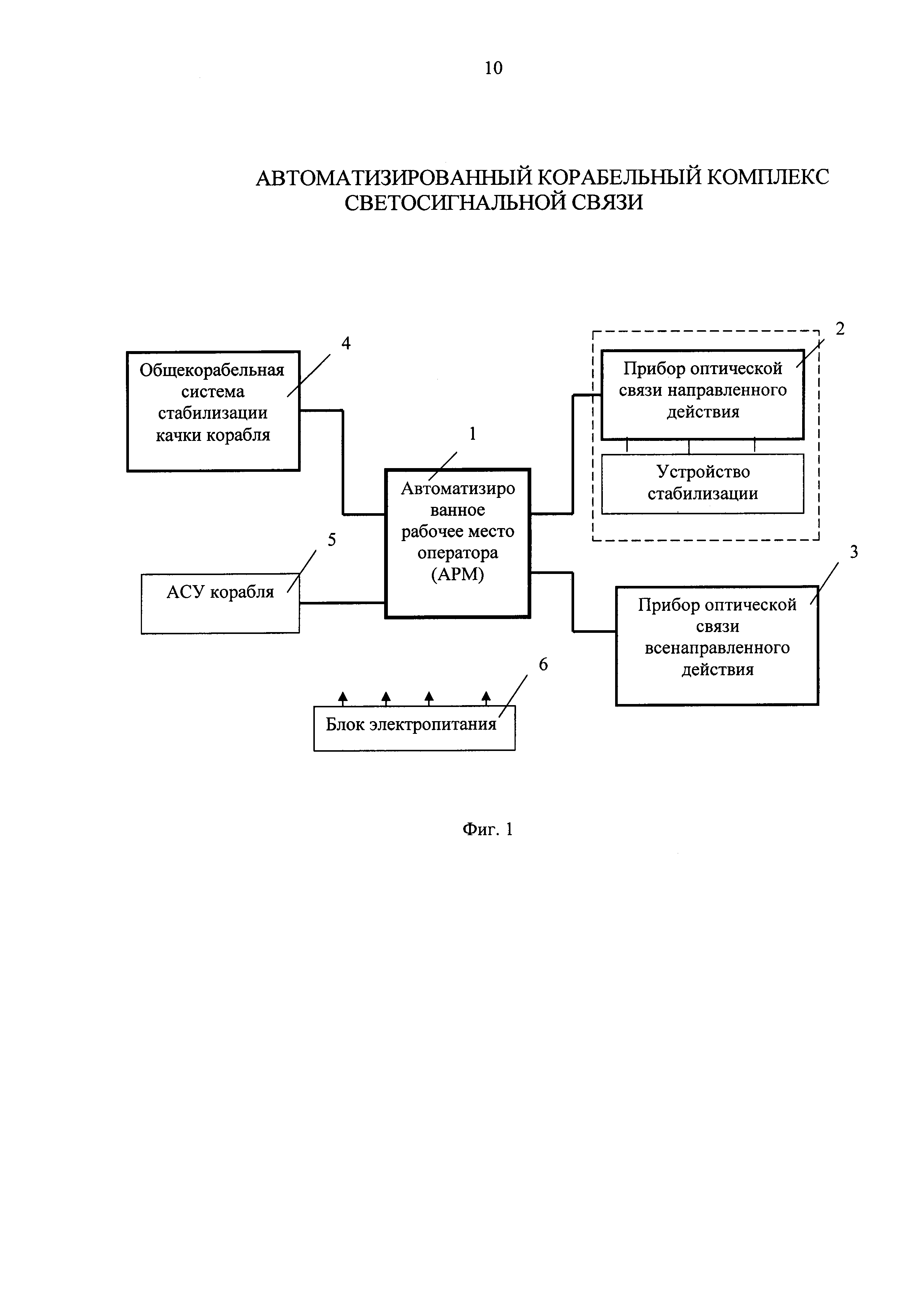
На фиг. 1 представлена блок-схема автоматизированного корабельного комплекса светосигнальной связи. Она состоит из:
1 - автоматизированного рабочего места оператора (АРМ); 2 - прибора оптической связи направленного действия с устройством стабилизацией; 3 - прибора оптической связи всенаправленного действия; 4 - общекорабельной системы стабилизации качки корабля; 5 - автоматизированной системы управления корабля (АСУ); 6 - блоков электропитания комплекса от бортовой сети корабля.
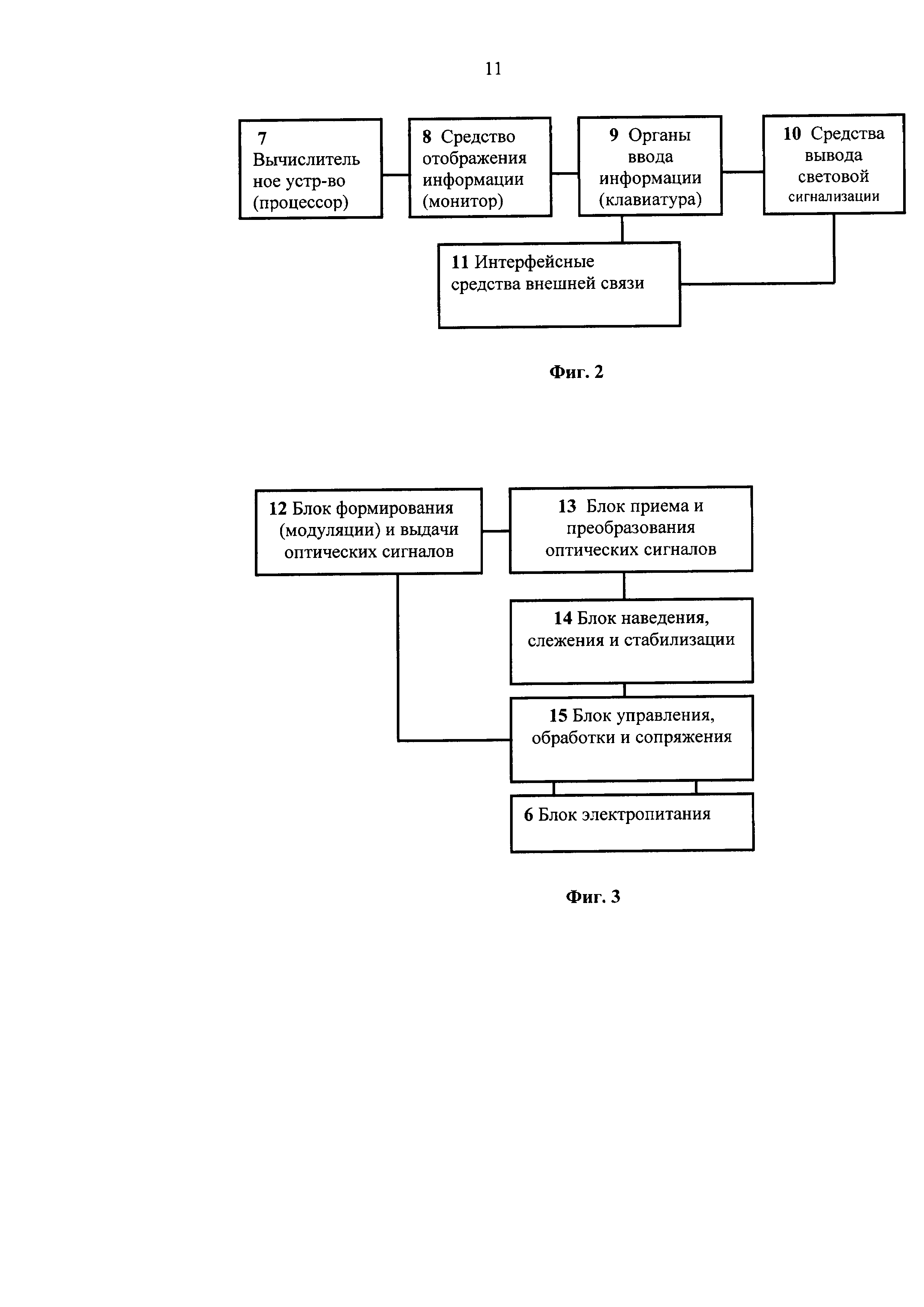
Автоматизированное рабочее место оператора 1 (фиг. 2) в своем составе имеет:
7 - вычислительное устройство (процессор);
8 - средство отображения информации (монитор);
9 - органы ввода информации (клавиатуру);
10 - средства вывода световой и звуковой сигнальной и аварийной информации;
11 - интерфейсные средства внешней связи.
Прибор оптической связи направленного действия 2 (фиг. 3) с системой стабилизацией имеет в своем составе: передающее устройство, выполненное на базе морского сигнального прожектора со встроенной светодиодной матрицей, модулем управления и формирования оптических сигналов; приемное устройство, включающее систему линз, фотодетектор и устройство последетекторной обработки; вычислительное устройство; блок стабилизации, наведения и слежения за корреспондентом и интерфейсные средства внешних связей.
Прибор оптической связи всенаправленного действия 3 имеет в составе: передающее устройство, включающее светодиодную матрицу, модуль управления и формирования оптических сигналов; вычислительное устройство; интерфейсные средства внешних связей.
Общекорабельная система стабилизации качки корабля 4 служит для компенсации бортовой и килевой качки корабля - стабилизации положения приемного и передающего устройства в условиях волнения моря, АРМ 1 через блок сопряжения сопрягается с гироазимутгоризонткомпасом, приема и обработки текущих значений параметров бортовой и килевой качки, курса корабля.
Автоматизированная система управления корабля (АСУ) 5 служит для выдачи данных о текущем местоположении корреспондента на АРМ 1.
Прибор оптической связи направленного действия с системой стабилизацией 2 (фиг. 2) предназначен для:
- приема команд управления и данных для выдачи по оптическим каналам связи от АРМ 1;
- выдачи принимаемой по оптическим каналам связи информации на АРМ 1;
- автоматического и ручного наведения на корреспондента, в том числе по данным о текущем местоположении корреспондента, получаемым с АСУ5 корабля;
- автоматического удержания корреспондента в поле зрения при движении кораблей в процессе обмена информацией по оптическим каналам связи;
- компенсации бортовой и килевой качки корабля - стабилизации положения приемного и передающего устройства в условия волнения моря;
- сопряжения с гироазимутгоризонткомпасом, приема и обработки текущих значений параметров бортовой и килевой качки, курса корабля.
Прибор оптической связи направленного действия с системой стабилизацией 2 (фиг. 3) состоит из:
12 - блока формирования (модуляции) и выдачи оптических сигналов;
13 - блока приема и преобразования оптических сигналов;
14 - блока наведения, слежения и стабилизации;
15 - блока управления, обработки и сопряжения;
6 - блока питания для формирования оптического сигнала необходимой мощности.
Блок приема и преобразования оптических сигналов 13 предназначен для фокусировки принимаемого оптического сигнала на фотодетектор, преобразования оптического сигнала в электрический, последетекторной обработки сигнала, выдачи принимаемого сигнала в цифровом виде на блок управления.
Блок управления 15 предназначен для: управления процессом выдачи информации по оптическим каналам по средствам формирования и передачи соответствующих команд управления и информационных данных на блок выдачи; управления блоком приема; распознавания полезного сигнала и выдачи данных, принимаемых по оптическим каналам связи, на пульт АРМ; управления блоком наведения, слежения и стабилизации по данным о местоположении цели, курсе и параметрах качки своего корабля, принимаемых от пульта управления и гироазимутгоризонткомпаса соответственно.
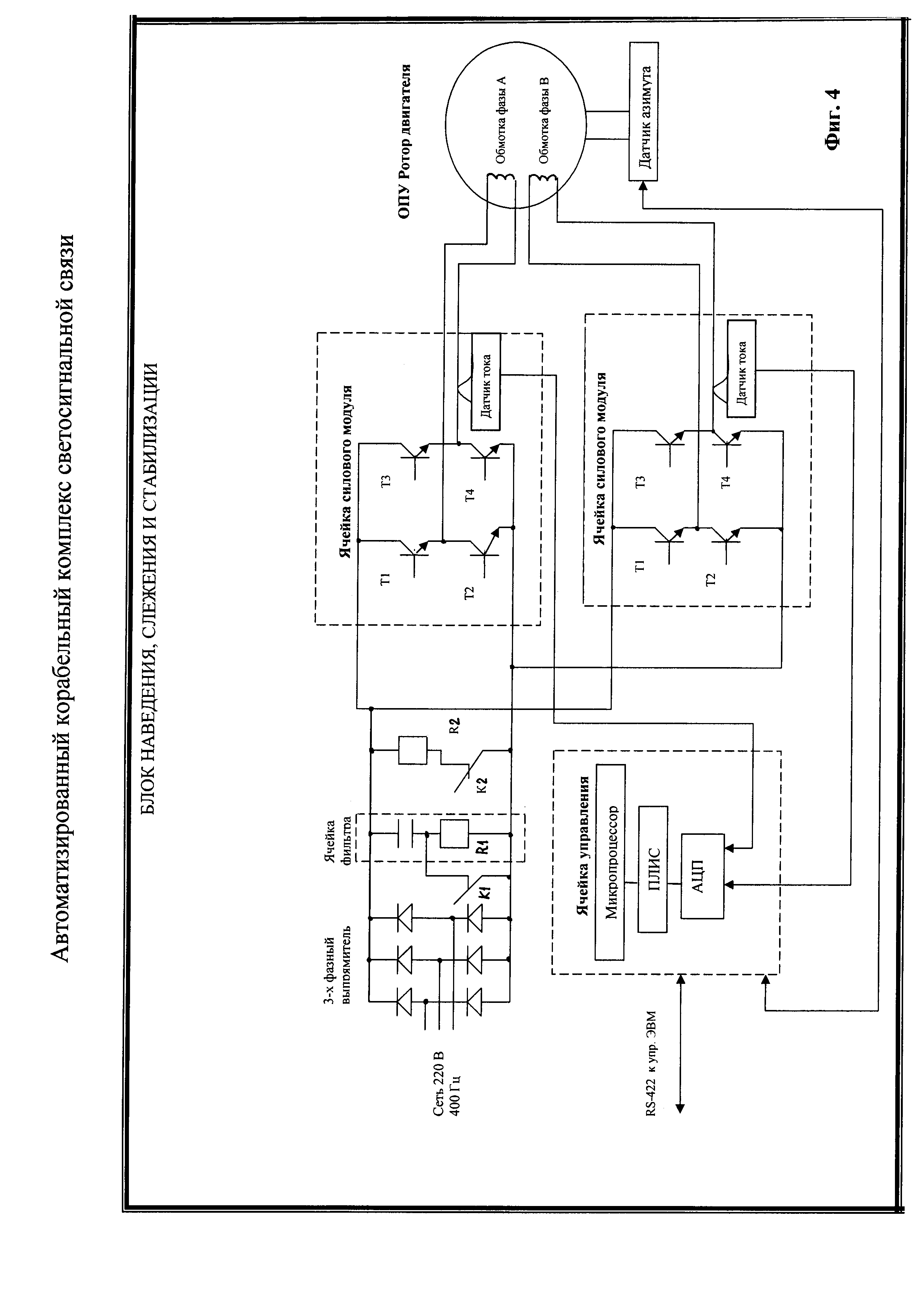
Блок наведения, слежения и стабилизации 14 предназначен для приема управляющих команд от блока управления, формирования и выдачи управляющих сигналов на двигатели, перемещения приемного блока и блока выдачи оптических сигналов в горизонтальной и вертикальной плоскостях.
Он состоит (фиг. 4) из четырех ячеек, ячейки управления, двух ячеек с силовыми модулями по одной на каждую обмотку электродвигателя и ячейки конденсаторов, при этом ячейка управления включает в себя микропроцессор ATMega 128, программируемую логическую интегральную схему (ПЛИС ALTERA) и два высокоскоростных АЦП для преобразования сигналов от датчика тока, причем ячейка связана с датчиком азимута и управляющим компьютером по интерфейсу RS-422, а ячейка силового модуля включает в себя ключи на основе IGBT транзисторов, допускающих ток коммутации 50 А и напряжение до 1200 В, и датчик тока, измеряющий ток через обмотку электродвигателя и обеспечивающий обратную связь по току.
Прибора оптической связи направленного действия с системой стабилизацией должен работать как в круговом, так и в секторном режимах обзора. Таким образом, система управления азимутальным приводом должна обеспечивать поддержание постоянной скорости вращения прибора оптической связи с необходимой точностью и плавностью хода, установку прибора оптической связи в заданный угол и его удержание при наличии внешних возмущений. Высокий пусковой момент электродвигателя необходим для разгона и торможения прибора оптической связи за заданное время.
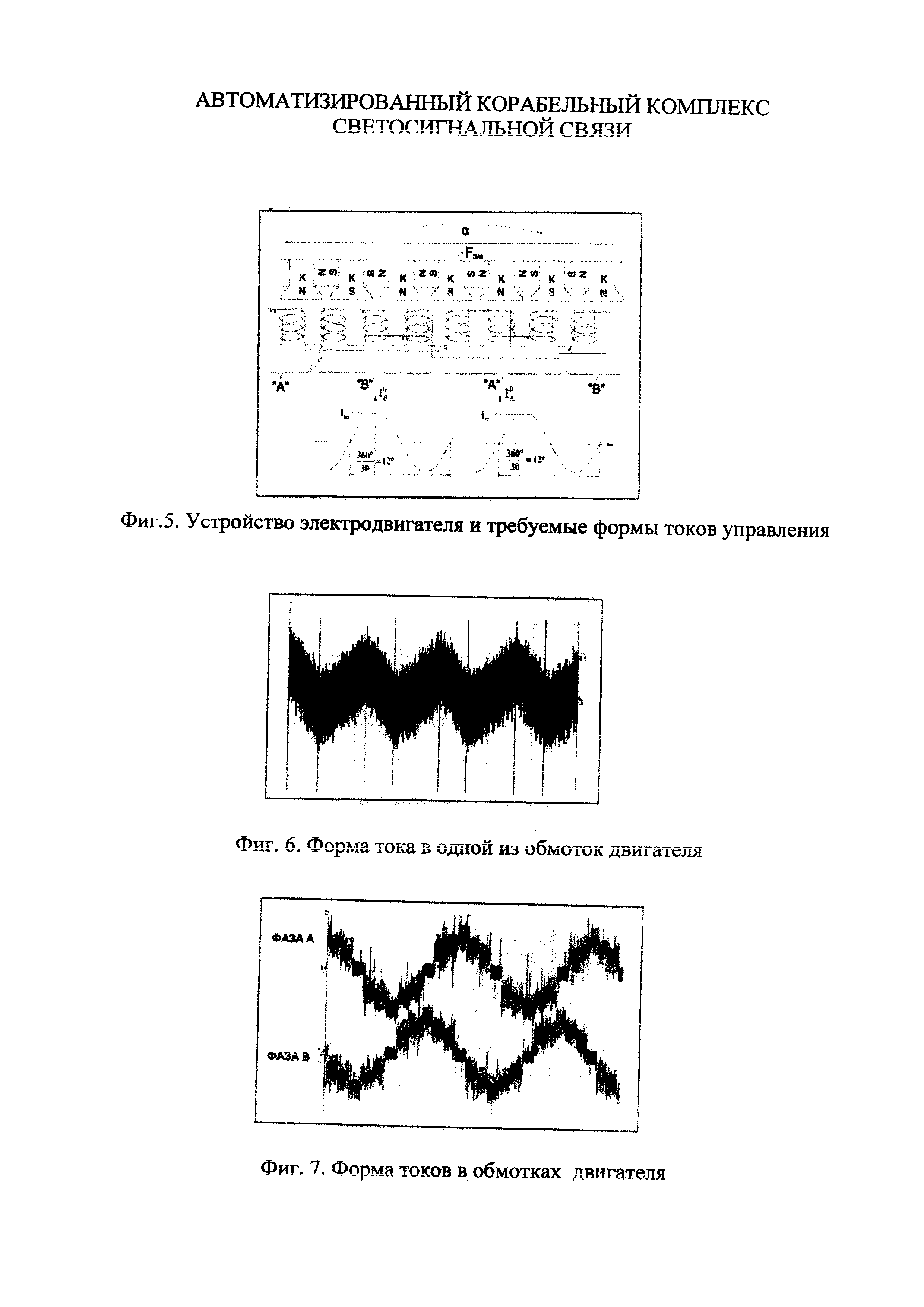
Блок наведения, слежения и стабилизации представляет собой электромеханическое устройство, осуществляющее поворот прибора оптической связи (ПОС) с помощью двухфазного безредукторного синхронного моментного электродвигателя с возбуждением постоянными магнитами. Основой блока является силовой подшипник с ротором и статором электродвигателя, которые размещены в литом корпусе. Ротор электродвигателя соединен с ПОС, статор закреплен на неподвижной части блока. Устройство электродвигателя и требуемая форма токов управления, продаваемая на обмотки, показана на фиг. 5. Ротор электродвигателя имеет 64 зубца, на которые уложены две распределенные обмотки фазы А и фазы В. На статоре установлены 50 высококоэрцитивных постоянных магнитов, между которыми расположены концентраторы (KN, KS). При подаче в обмотки фазы А и В токов двигатель формирует вращающий момент Fэм в сторону увеличения угла α.
Концентрично с осью вращения электродвигателя в блоке размещается токосъемник и датчик азимута.
Датчик азимута является элементом позиционной обратной связи и предназначен для изменения угла поворота ПОС в азимутальной плоскости. Диапазон измеряемых углов - от 0 до 360°. Обмен данными с блоком управления осуществляется по интерфейсу RS-422.
По запросам блока управления датчик азимута выдает код текущего значения угла. Код текущего угла выдается в шестнадцатиразрядном виде двумя байтами (старший и младший), вес младшего разряда 20 угл. сек. Одним из преимуществ примененного датчика азимута является возможность электрической установки в ноль при поступлении соответствующей команды из блока управления, что исключает необходимость механической юстировки. Также датчик имеет встроенную схему контроля монотонности кода угла поворота вала и выдает количество сбоев монотонности при поступлении запроса из блока управления наведения, слежения и стабилизации (УНСС).
Блок УНСС расположен в аппаратном контейнере и формирует сдвинутые по фазе на 90 град квазисинусоидальные токи управления, поступающие на обмотки электродвигателя. Амплитуда тока каждой обмотки контролируется датчиками тока. Амплитуда и фаза тока изменяется в зависимости от режима работы азимутального привода. В состав блока входят четыре ячейки 6 ячейка управления, две ячейки с силовыми модулями (по одной на каждую обмотку электродвигателя) и ячейка конденсаторов. Такая конструкция блока обеспечивает быстрое устранение неисправностей путем замены ячеек.
Ячейка конденсаторов фильтра сглаживает пульсацию напряжения в цепи электропитания ячеек силового модуля в момент переключения ключей, суммарная емкость конденсаторов фильтра 5600 мкФ.
Ячейка силового модуля включает в себя ключи на основе IGBT транзисторов, допускающих ток коммутации 50 А и напряжение до 1200 В, и датчик тока, измеряющий ток через обмотку электродвигателя и обеспечивающий обратную связь по току.
Ячейка управления включает в себя микропроцессор AT Mega 128, программируемую логическую интегральную схему (ПЛИС ALTERA) типа EP1K10TC100-3N и два высокоскоростных АЦП для преобразования сигналов датчиков тока. Ячейка связана с датчиком азимута и управляющим компьютером по интерфейсу RS-422.
На фиг. 5 представлено устройство электродвигателя и требуемые формы токов управления.
Ячейка управления в соответствии с заданным управляющим компьютером режимом работы привода и полученной информацией от датчика азимута и датчиков тока рассчитывает параметры токов управления обмотками электродвигателя и выдает управляющие сигналы на ячейки силового модуля, которые обеспечивают включение и отключение ключей в нужной последовательности, в результате чего формируется рассчитанный токовый коридор в обмотках электродвигателя. На фиг. 6 представлена форма тока в одной из обмоток двигателя.
Напряжение электропитания постоянного тока 300 В на ячейки силовых модулей и ячейку конденсаторов фильтра поступает с трехфазного выпрямителя блока. На время заряда конденсаторов фильтра к выходу выпрямителя подключается ограничительный резистор R1 для ограничения зарядного тока. Балластный резистор R2 разряжает конденсаторы фильтра после отключения азимутального привода для обеспечения безопасности личного состава.
Блок управления осуществляет контроль работоспособности ячеек силовых модулей и при отключении тока в обмотках электродвигателя от требуемого значения формирует сигнал неисправности силового модуля.
Работа блока УНСС. В зависимости от команд, пришедших от управляющего компьютера и задающих режим работы азимутального привода, привод может работать в секторном режиме и режиме вращения. При работе привода в секторном режиме (в режиме позиционирования) используется главная обратная связь по угловому положению ротора азимутального двигателя и корректирующая обратная связь по угловому ускорению вращения ротора. В режиме вращения с заданной скоростью, при разгоне и торможении используется обратная связь по угловой скорости вращения ротора. Для увеличения плавности вращающего момента форма управляющего тока должна быть приближена к гармонической. Таким образом, в обмотки двухфазного двигателя подаются управляющие токи:

где Im - амплитудное значение заданного тока;
α - показания датчика азимута;
φ - угловой сдвиг между нулевым показанием датчика азимута и нулевым положением ротора двигателя (при котором в фазу «В» задается максимальное значение тока, а в фазу «А» задается нулевое значение при этом двигатель формирует вращающий момент в положительном направлении).
Форма токов в обмотках двигателя представлена на фиг. 7. В режиме вращения, при разгоне и торможении амплитудное значение заданного тока двигателя формируется следующим образом:
Im=KΩ(Ω0-Ω),
где КΩ - коэффициент усиления по скоростному рассогласованию;
Ω0 - заданный сигнал контура управления скоростью;
Ω - угловая скорость вращения ротора двигателя.
В секторном режиме амплитудное значение заданного тока вырабатывается как с учетом обратной связи по ускорению, так и по углу:
Ω0=Кα(α0-α), Im=КΩ(Ω0-Ω),
где α0 - заданное угловое положение ротора двигателя;
α - показания датчика азимута;
Кα - коэффициент усиления по угловому рассогласованию.
При поступлении команды отключения вращения привод переходит в режим динамического торможения, при котором обмотки замыкаются сами на себя через нижние ключи. Динамическое торможение продолжается до тех пор, пока скорость вращения не снизится до нуля. Также в момент торможения осуществляется непрерывный контроль тока, чтобы он не вышел за допустимые пределы и не возникал перегрев обмоток двигателя.
В результате разработки блока наведения, слежения и стабилизации создана система, удовлетворяющая заданным требованиям в части точности и основных динамических свойств. Применение микроконтроллера и ПЛИС позволяет эффективно решать задачи управления алгоритмом управления, которые реализуются полностью за счет программных средств.
Использование в системе безредукторного синхронного высокомоментного вентильного двигателя с возбуждением постоянными магнитами с широким диапазоном рабочих скоростей позволило улучшить массогабаритные показатели, а отсутствие в двигателе щеточно-коллекторного узла и силового редуктора повысило надежность комплекса.
Автоматизированный корабельный комплекс светосигнальной связи, состоящий из прибора оптической связи направленного действия, прибора оптической связи всенаправленного действия и блока электропитания от бортовой сети корабля, при этом автоматизированное рабочее место оператора состоит из вычислительного устройства, соединенного со средствами отображения информации, органами ввода и вывода информации и интерфейсных средств внешней связи, а прибор оптической связи направленного действия состоит из блока формирования и выдачи оптических сигналов, выполнен со встроенной светодиодной матрицей и соединен с блоком приема и преобразования оптических сигналов и блоком наведения, слежения и стабилизации, который соединен с блоком управления, обработки и сопряжения, который, в свою очередь, соединен с блоком электропитания, причем автоматизированное рабочее место оператора радиально соединено с общекорабельной системой стабилизации качки корабля, автоматизированной системой управления кораблем, прибором оптической связи направленного действия и прибором оптической связи всенаправленного действия, отличающийся тем, что блок наведения, слежения и стабилизации состоит из четырех ячеек, ячейки управления, двух ячеек с силовыми модулями по одной на каждую обмотку электродвигателя и ячейки конденсаторов, при этом ячейка управления включает в себя микропроцессор ATMega 128, программируемую логическую интегральную схему ALTERA и два высокоскоростных АЦП для преобразования сигналов от датчика тока, причем ячейка связана с датчиком азимута и управляющим компьютером по интерфейсу RS-422, а ячейка силового модуля включает в себя ключи на основе IGBT транзисторов, допускающих ток коммутации 50 А и напряжение до 1200 В, и датчик тока, измеряющий ток через обмотку электродвигателя и обеспечивающий обратную связь по току.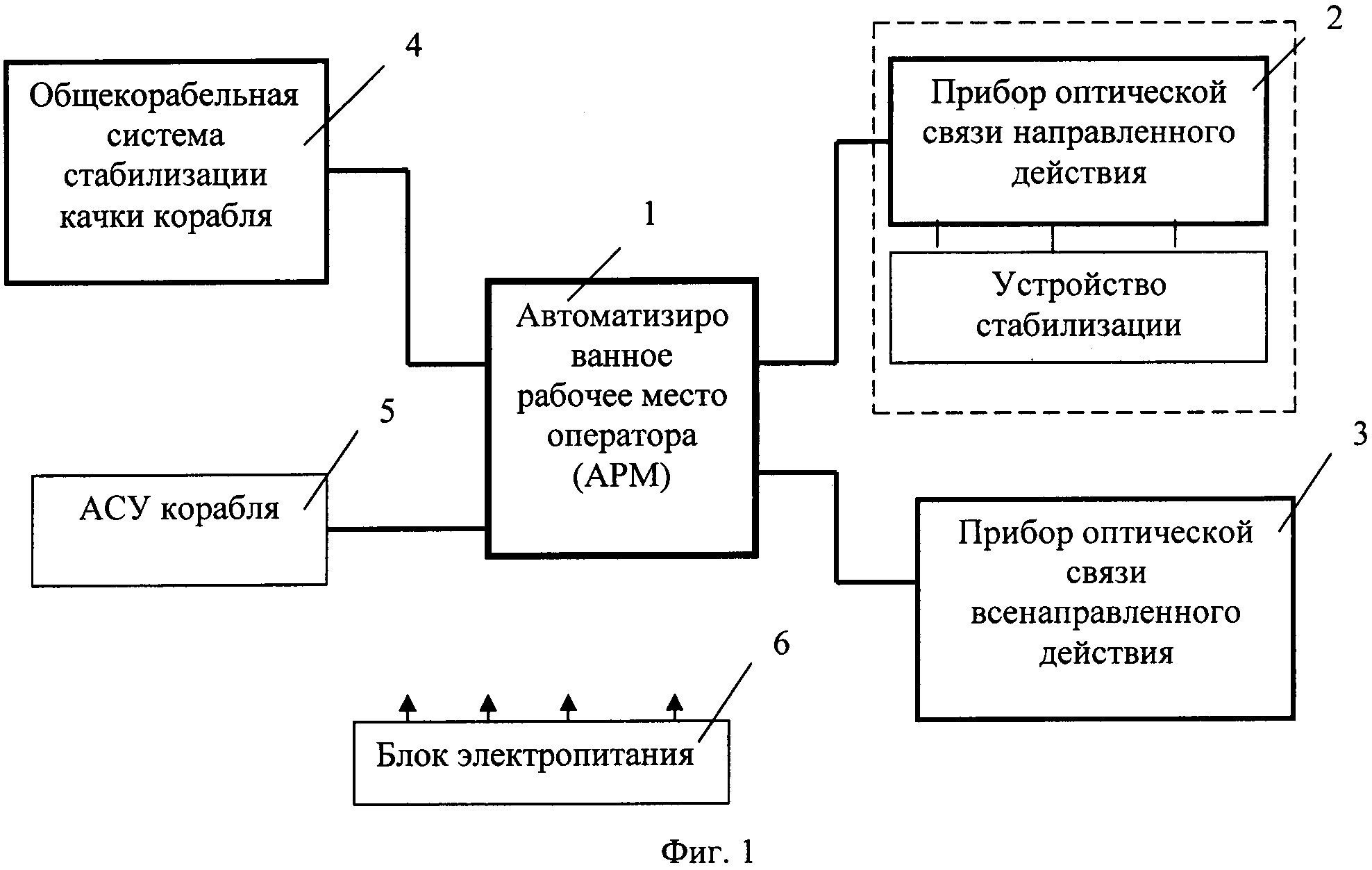
Автоматический коммутатор антенн
Цифровой комплекс спутниковой системы связи
Способ формирования многочастотного сигнала
Способ установления битовой синхронизации псевдослучайных последовательностей с использованием принципов декодирования
Устройство передачи информации с подводной лодки бесконтактным методом
Автоматическое аварийное устройство для остановки прокладываемого подводного кабеля
Устройство оценки частоты гармонического зашумлённого сигнала
Способ оценки вероятности ошибки на бит по результатам декодирования кодовых слов
Устройство передачи информации с подводной лодки бесконтактным методом
Автоматическое аварийное устройство для остановки прокладываемого подводного кабеля
Устройство оценки частоты гармонического зашумлённого сигнала
Способ оценки вероятности ошибки на бит по результатам декодирования кодовых слов
Способ сложения мощности двух и более излучателей крайненизкочастотного диапазона
Способ адаптивного выбора оптимального параметра алгоритма коррекции сигналов
Передающий комплекс связи сверхнизкочастотного и крайненизкочастотного диапазонов с глубокопогруженными и удаленными объектами
Корабельная резервная система передачи информации
Система сложения мощности радиопередатчиков
Способ получения электрического тока

