Результат интеллектуальной деятельности: УСТРОЙСТВА И СПОСОБЫ УПРАВЛЕНИЯ ДЛЯ СИСТЕМЫ ВЗИМАНИЯ ДОРОЖНЫХ СБОРОВ
Вид РИД
Изобретение
Настоящее изобретение относится к устройствам и к способам управления для системы взимания дорожных сборов, которая основана на бортовых устройствах, транспортируемых транспортными средствами.
В современных системах взимания дорожных сборов транспортные средства, с которых взимаются дорожные сборы, оснащены бортовыми устройствами (OBU), которые могут использоваться для определения местоположения транспортных средств для последующего взимания с них дорожных сборов (пошлин) за использование ими дороги. Бортовые устройства (OBU) могут представлять собой устройства разнообразных конструкций: бортовые устройства (OBU) могут представлять собой устройства, ʺсами определяющие свое местоположениеʺ, то есть, которые могут сами непрерывно определять свое местоположение, например, посредством приемника спутниковой навигационной системы в качестве части спутниковой навигационной системы (глобальной спутниковой навигационной системы, GNSS) и сообщать сведения об определенных таким способом местоположениях (ʺзасечках местоположенияʺ) либо непосредственно в центр обработки информации в системе взимания дорожных сборов по сети мобильной связи или по сети географически распределенных радиомаяков, либо в виде ʺабстрагированныхʺ транзакций по оплате дорожных сборов, вычисленных на основании сообщенных местоположений. В альтернативном варианте такие бортовые устройства (OBU) глобальной спутниковой навигационной системы (GNSS) могут просто сохранять сведения о сообщенных местоположениях или о произведенных ими транзакциях по оплате дорожных сборов, или снимать сумму пошлин, вычисленную на основании этих местоположений, с внутреннего кредитного счета для оплаты дорожных сборов. Бортовые устройства (OBU) также могут представлять собой устройства, ʺместоположение которых определяют извнеʺ, например, с использованием множества маяков для взимания дорожных сборов или радиомаяков, которые географически распределены по системе взимания дорожных сборов, и которые устанавливают соответствующую ближнюю связь или DSRC (специализированную связь на коротких расстояниях) с проезжающими мимо бортовыми устройствами (OBU) и определяют их местоположение относительно известных мест расположения радиомаяков, что обусловлено ограниченной дальностью связи. Сведения о соответствующих сообщенных местоположениях или о вычисленных на их основании суммах транзакций по оплате дорожных сборов, могут быть затем сгенерированы бортовыми устройствами (OBU) или радиомаяками для взимания дорожных сборов и подвергнуты обработке либо в бортовых устройствах (OBU), либо в центре обработки информации.
Задачей настоящего изобретения является создание новых устройств и способов управления для выявления нарушений правил движения или правил оплаты дорожных сборов и наложения взысканий за них в таких системах взимания дорожных сборов.
В первом аспекте настоящего изобретения эта задача решена посредством устройства управления упомянутого выше типа, содержащего:
по меньшей мере одно регистрирующее транспортное средство и по меньшей мере одно контролирующее транспортное средство, каждое из которых содержит устройство считывания для считывания регистрационного номера с номерного знака транспортного средства и поддерживает беспроводную связь с центральным сервером регистрации нарушений,
при этом регистрирующее транспортное средство сконфигурировано для обнаружения нарушений правил движения или правил оплаты дорожных сборов бортовым устройством или транспортирующим его транспортным средством и для передачи записи с данными о нарушении, включающей в себя сведения о месте, где произошло нарушение, и результат считывания регистрационного номера транспортного средства, в сервер регистрации нарушений в том случае, если совершено нарушение,
при этом сервер регистрации нарушений сконфигурирован для регистрации контролирующих транспортных средств, включая их местоположения или окрестности, и для предоставления записей с данными о нарушениях, сведений о местах, где произошли нарушения, которые находятся в окрестности местоположения, в контролирующее транспортное средство, зарегистрированное в этом месте или в этих окрестности, и
при этом контролирующее транспортное средство сконфигурировано для регистрации местоположения или его окрестности в сервере регистрации нарушений и для определения записи с данными о нарушении, предоставленной сервером регистрации нарушений для считанного номерного знака, и для выдачи предупреждающего сообщения, если такая запись существует.
Во втором, третьем и четвертом аспектах настоящего изобретения оно относится к регистрирующим транспортным средствам, к серверам регистрации нарушений и к контролирующим транспортным средствам, отличающимся тем, что содержат вышеупомянутые компоненты и имеют вышеупомянутые функциональные возможности.
В пятом аспекте настоящего изобретения оно относится к способу управления в системе взимания дорожных сборов, которая основана на бортовых устройствах, транспортируемых транспортными средствами, с использованием по меньшей мере одного регистрирующего транспортного средства и по меньшей мере одного контролирующего транспортного средства, которые могут поддерживать беспроводную связь с центральным сервером регистрации нарушений, содержащему следующие операции:
выполняемые в регистрирующем транспортном средстве:
- обнаруживают факт нарушения правил движения или правил оплаты дорожных сборов бортовым устройством или транспортирующим его транспортным средством, и, если факт нарушения существует, то
- передают запись с данными о нарушении, содержащую сведения об определенном месте, где произошло нарушение, и считанный регистрационный номер транспортного средства, в сервер регистрации нарушений;
выполняемые в сервере регистрации нарушений:
- регистрируют контролирующие транспортные средства, включая их местоположения или их окрестности,
- принимают записи с данными о нарушениях из регистрирующих транспортных средств и, если зафиксированные ими места, где произошли нарушения, находятся в пределах окрестности их местоположения, то
- предоставляют эти записи с данными о нарушениях в контролирующее транспортное средство, зарегистрированное в этом местоположении или в этой окрестности;
выполняемые в контролирующем транспортном средстве:
- регистрируют его местоположение или его окрестность в сервере регистрации нарушений,
- считывают регистрационный номер с номерного знака проезжающего мимо транспортного средства,
- определяют запись с данными о нарушении, предоставленную сервером регистрации нарушений, для считанного регистрационного номера и
- выдают предупреждающее сообщение, если такая запись существует.
Изобретение основано на новом подходе к распределенной системе управления, которая состоит из первого парка регистрирующих транспортных средств (ʺохотниковʺ) и второго парка контролирующих транспортных средств (ʺловцовʺ), которые поддерживают связь друг с другом через общий сервер регистрации нарушений. ʺОхотникиʺ являются хорошо оснащенными для автоматического обнаружения нарушений, и от них не требуется предпринимать какие-либо иные дополнительные действия в отношении транспортных средств-нарушителей, кроме генерации записей с данными о нарушениях; их взаимодействия с контролируемыми транспортными средствами являются кратковременными, и, следовательно, они могут быстро передвигаться и даже проверять транспортные средства, движущиеся с высокой скоростью или во встречном транспортном потоке, и их количество может оставаться низким, в силу чего общие затраты на оборудование не выходят за разумные пределы. Для ʺловцовʺ требуется сравнительно небольшое количество оборудования, поскольку они не выявляют нарушения, а только считывают регистрационные номера транспортных средств, ищут соответствующие записи с данными о нарушениях и выдают предупреждающие сигналы для транспортных средств-нарушителей. В таком случае экипаж контролирующего транспортного средства может, например, остановить транспортное средство-нарушитель и произвести локальную проверку вручную. Вследствие невысоких требований, предъявляемых к оборудованию, может быть предусмотрено наличие большого количества контролирующих транспортных средств (ʺловцовʺ), и, следовательно, они могут, в частности, также проводить локальные инспекторские проверки, отнимающие много времени. Например, существующие парки транспортных средств специального назначения, таких как, например, транспортные средства аварийно-спасательных служб, средства общественного транспорта, такси и т.п. могут быть превращены в контролирующие транспортные средства и выполнять свои функции контроля мобильно в движущемся транспортном потоке, и стационарно в остановившемся транспорте, тогда как несколько сложных регистрирующих транспортных средств (ʺохотниковʺ) непрерывно движутся в транспортном потока с высокой мобильностью и генерируют записи с данными о нарушениях. В результате, сами средства автоматического управления бортовыми устройствами могут быть реализованы даже в больших, сильно разветвленных дорожных сетях, которые содержат полосы высокоскоростного движения и полосы встречного движения.
Устройства и способы из настоящего изобретения пригодны для бортовых устройств (OBU) (использующих DSRC) обоих типов: для бортовых устройств (OBU), представляющих собой устройства, ʺместоположение которых определяют извнеʺ, которые уже содержат интерфейс специализированной радиосвязи на коротких расстояниях (интерфейс DSRC-радиосвязи), и для бортовых устройств (OBU) глобальной спутниковой навигационной системы (GNSS), представляющих собой устройства ʺсами определяющие свое местоположениеʺ, которые дополнительно содержат интерфейс DSRC-радиосвязи для управления и настройки.
Количество контролирующих транспортных средств предпочтительно является значительно большим, чем количество регистрирующих транспортных средств, в частности, предпочтительно большим, по меньшей мере, в десять раз.
Нарушения, обнаруживаемые регистрирующим транспортным средством, могут включать в себя все типы нарушений правил оплаты дорожных сборов или правил движения, которые могут быть обнаружены автоматически, например нарушения, связанные с превышением скорости, которые обнаруживают посредством устройства измерения скорости в регистрирующем транспортном средстве, запреты на вождение (включая запреты по времени), обнаруживаемые посредством устройства обнаружения транспортных средств, имеющегося в регистрирующем транспортном средстве, и т.п. Нарушениями предпочтительно являются нарушения правил оплаты дорожных сборов, и в частности, такие нарушения, которые могут быть выявлены на основании параметра дорожного сбора, который может быть считан с бортового устройства через интерфейс DSRC-радиосвязи. Такие параметры дорожного сбора могут быть произвольными и предоставить информацию, например, о цели использования транспортного средства (например, транспортное средство аварийно-спасательных служб, средство общественного транспорта, личный автомобиль, грузовик и т.п.), о статусе пользователя транспортного средства, о размере, о весе, об экологическом классе, о количестве осей транспортного средства, или о связи между (индивидуальным для каждого пользователя) бортовым устройством и физическим транспортным средством (например, по ссылке на номерной знак) и т.п. Всякий раз при вычислении дорожного сбора либо во время обмена информацией с радиомаяком для взимания дорожных сборов, либо при вычислении сумм транзакций по оплате дорожных сборов на основании сообщенных местоположений, параметров дорожного сбора, взимаемого с OBU, используют для определения суммы дорожного сбора или даже для определения того, подлежит ли оплате дорожный сбор.
Таким образом, предпочтительный вариант осуществления настоящего изобретения отличается тем, что обнаружение в регистрирующем транспортном средстве производится следующим образом: посредством интерфейса DSRC-радиосвязи с бортового устройства считывают, по меньшей мере, один параметр дорожного сбора, и проверяют правильность этого параметра дорожного сбора.
В еще одном аспекте изобретения оно относится, в частности, к проверке параметров дорожного сбора, зависящих от формы конкретного транспортного средства. Такими параметрами, зависящими от формы конкретного транспортного средства, которые определяют сумму дорожного сбора, подлежащую оплате, могут являться, например, габаритные размеры транспортного средства, количество осей в текущий момент времени (с прицепом или без него), конкретная конструкция кузова, например, грузовик или легковой автомобиль, и т.п., и они могут быть установлены или сохранены в качестве параметров дорожного сбора в бортовом устройстве. Для обнаружения неправомерных неправильных установок таких параметров дорожного сбора регистрирующее транспортное средство содержит DSRC-приемопередатчик для считывания параметра дорожного сбора, взимаемого с проезжающего мимо транспортного средства, и датчик для обнаружения параметра, характеризующего форму транспортного средства, причем это регистрирующее транспортное средство сконфигурировано для проверки соответствия параметра дорожного сбора параметру, характеризующему форму, и для передачи записи с данными о нарушении, включающей в себя сведения о месте, где произошло нарушение, и результат считывания регистрационного номера транспортного средства, в сервер регистрации нарушений в случае несоответствия.
В альтернативном варианте или в дополнение к этому регистрирующее транспортное средство может быть оснащено устройством для измерения скорости и, предпочтительно, направления движения проезжающего мимо транспортного средства для определения также факта нарушения правил движения или правил оплаты дорожных сборов на основании этих измеренных значений.
Как описано выше, обнаруживаемым параметром, характеризующим форму, и считываемым параметром дорожного сбора могут предпочтительно являться длина транспортного средства или количество осей, которые, в частности, являются подразделенными на категории (ʺклассифицированнымиʺ). Параметр, характеризующий форму контролируемого транспортного средства, может быть обнаружен множеством разнообразных способов, например, с использованием электронной камеры, содержащей программу распознавания объектов, с использованием радара-детектора для измерения транспортного средства или для обнаружения его колес, или предпочтительно с использованием лазерного дальномера или лазерного сканирующего устройства, который (которое) обнаруживает, по меньшей мере, часть формы транспортного средства путем его сканирования, когда оно проезжает мимо. За счет относительного перемещения между регистрирующим транспортным средством и контролируемым транспортным средством создают двумерное или трехмерное изображение (профиль или ʺоблако точкиʺ точек лазерного измерения расстояния), по меньшей мере, части транспортного средства, и на его основании, например, посредством программы распознавания объектов, может быть получен параметр, характеризующий форму, например, длина транспортного средства или количество осей, на основании которого, например, может быть сделан вывод об определенной категории транспортного средства (легковой автомобиль, грузовик, грузовик с прицепом и т.п.).
Регистрирующее транспортное средство может само определять то место, где произошло нарушение, например, посредством приемника спутниковой навигационной системы, или принимать сведения о нем непосредственно из проверяемого бортового устройства, если, например, оно содержит специализированное устройство определения местоположения или имеет сведения о нем, полученные иным способом, например из стационарного радиомаяка.
Особо предпочтительно, если регистрирующее транспортное средство оснащено устройством для измерения скорости и, предпочтительно, направления движения проезжающего мимо транспортного средства и добавляет эти измеренные значения в запись с данными о нарушении. В этом случае сервер регистрации нарушений также может быть сконфигурирован для выполнения экстраполяции изменения места, где произошло нарушение, по времени на основании вышеупомянутых измеренных значений для учета этого при проверке того, находится ли место, где произошло нарушение, в окрестности местоположения в определенный момент времени. За счет генерации оценок перемещений транспортных средств-нарушителей и координирования их с местоположениями контролирующих транспортных средств может быть увеличена вероятность того, что транспортное средство-нарушитель будет поймано контролирующим транспортным средством.
Согласно еще одному отличительному признаку настоящего изобретения, запись с данными о нарушении также может содержать отметку времени, и сервер регистрации нарушений может быть сконфигурирован так, что учитывает только те записи с данными о нарушениях, которые не выходят за пределы заданного промежутка времени. В альтернативном варианте или в дополнение к этому контролирующее транспортное средство может быть сконфигурировано так, что аннулирует те записи с данными о нарушениях, которые имеют отметки времени вне заданного промежутка времени. Это позволяет автоматически аннулировать старые записи с данными.
Дополнительные признаки и преимущества настоящего изобретения станут очевидными из приведенного ниже описания предпочтительного варианта его осуществления, в котором приведены ссылки на сопроводительные чертежи, на которых изображено следующее:
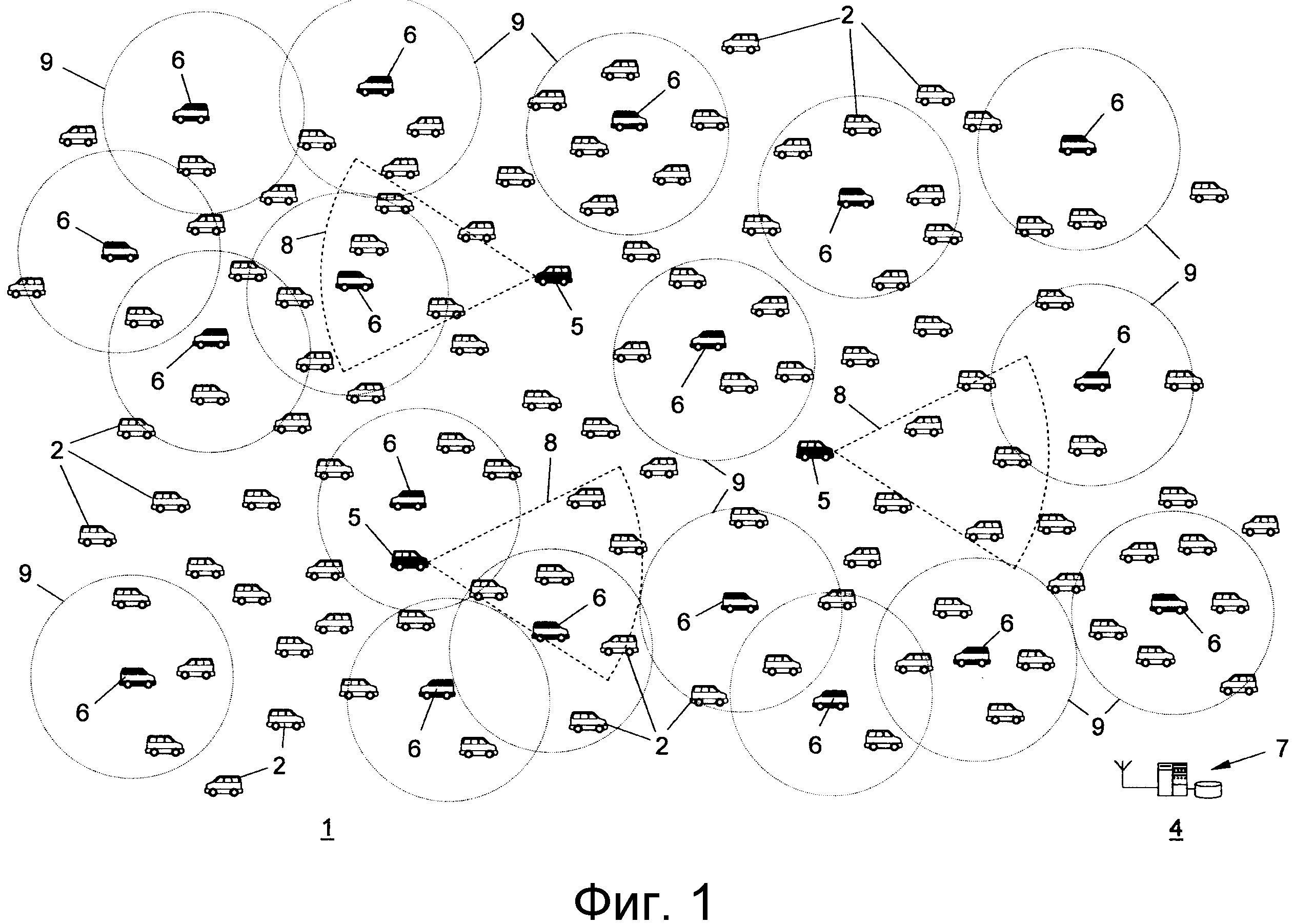
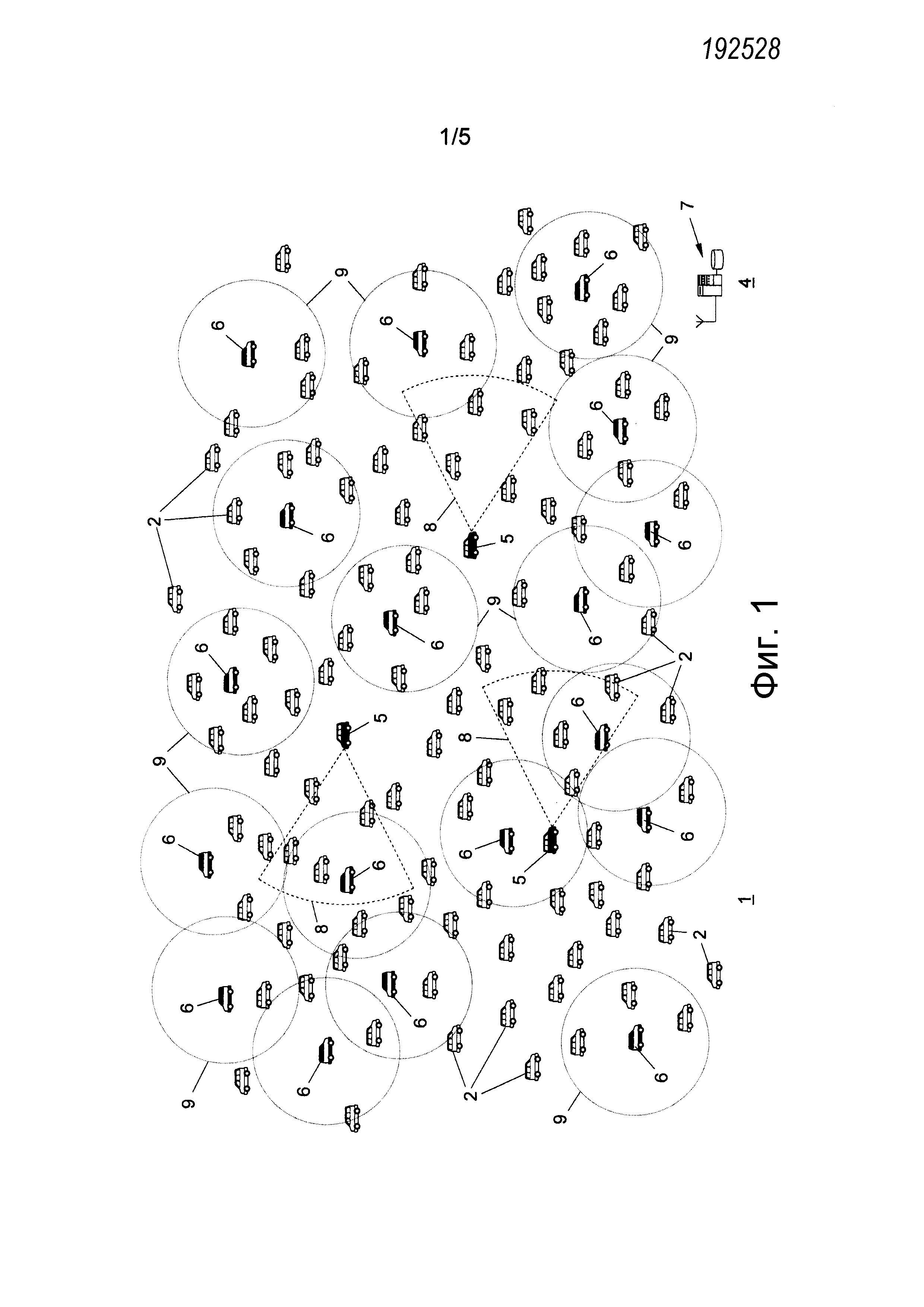
на чертеже Фиг. 1 схематично показан общий вид принципа действия устройств управления и способа управления из настоящего изобретения в совокупности транспортных средств в дорожной сети;
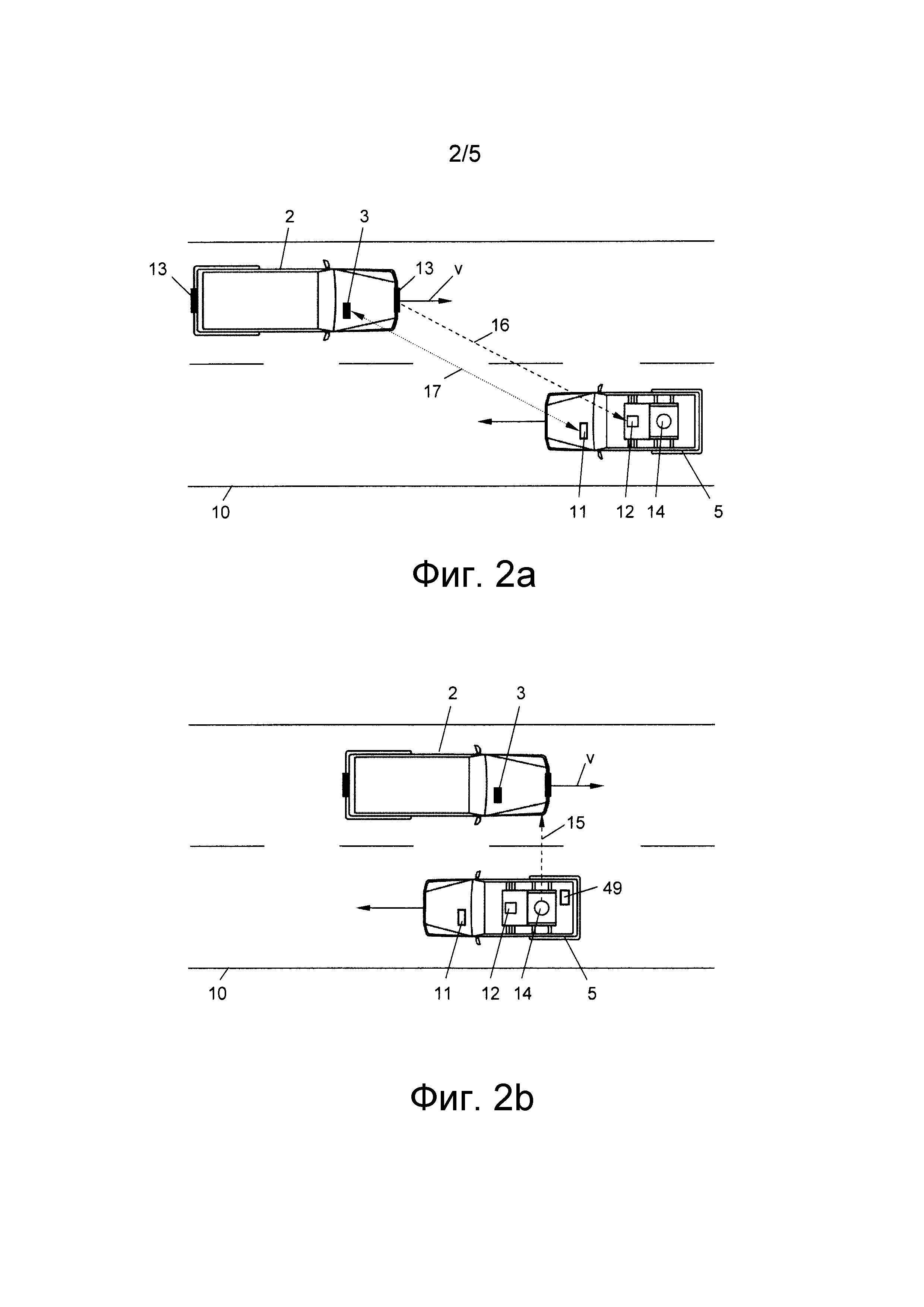
на чертежах Фиг. 2a и Фиг. 2b показаны различные компоненты устройства и операции способа, когда контролируемое транспортное средство проезжает мимо регистрирующего транспортного средства;
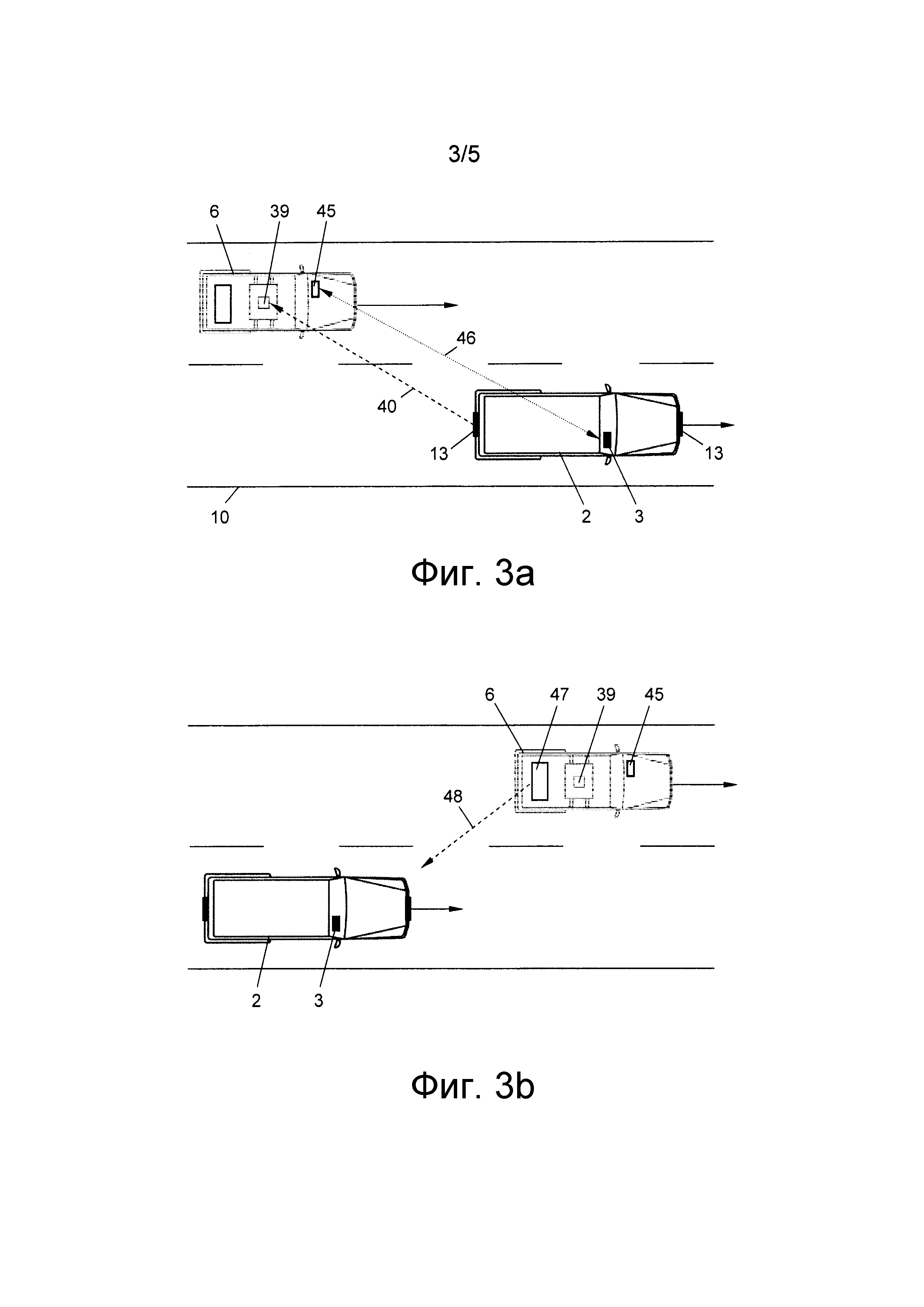
на чертежах Фиг. 3a и Фиг. 3b показаны различные компоненты устройства и операции способа, когда контролируемое транспортное средство проезжает мимо контролирующего транспортного средства;
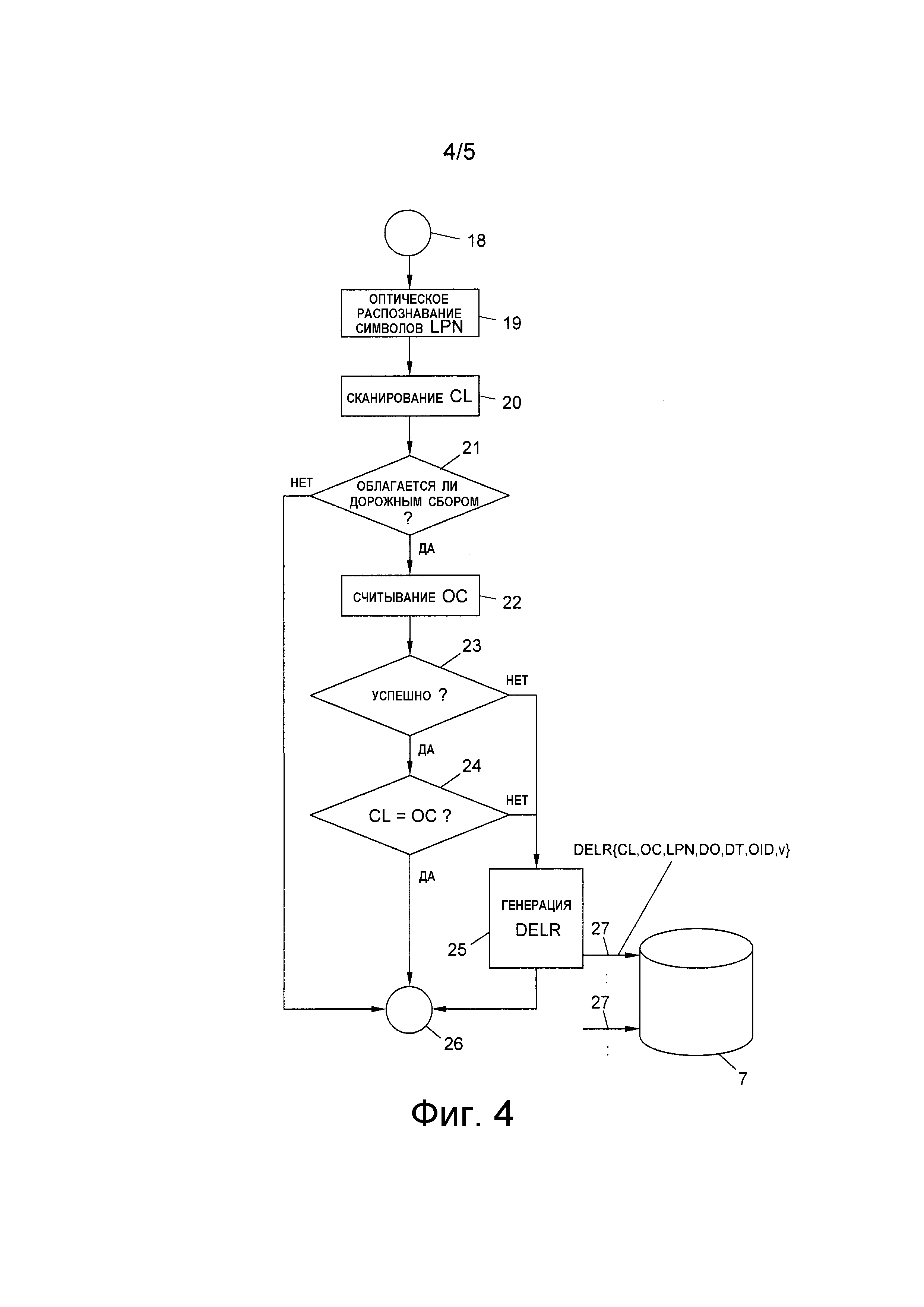
на чертеже Фиг. 4 изображена схема последовательности операций той части способа, которая выполняется в регистрирующем транспортном средстве; и
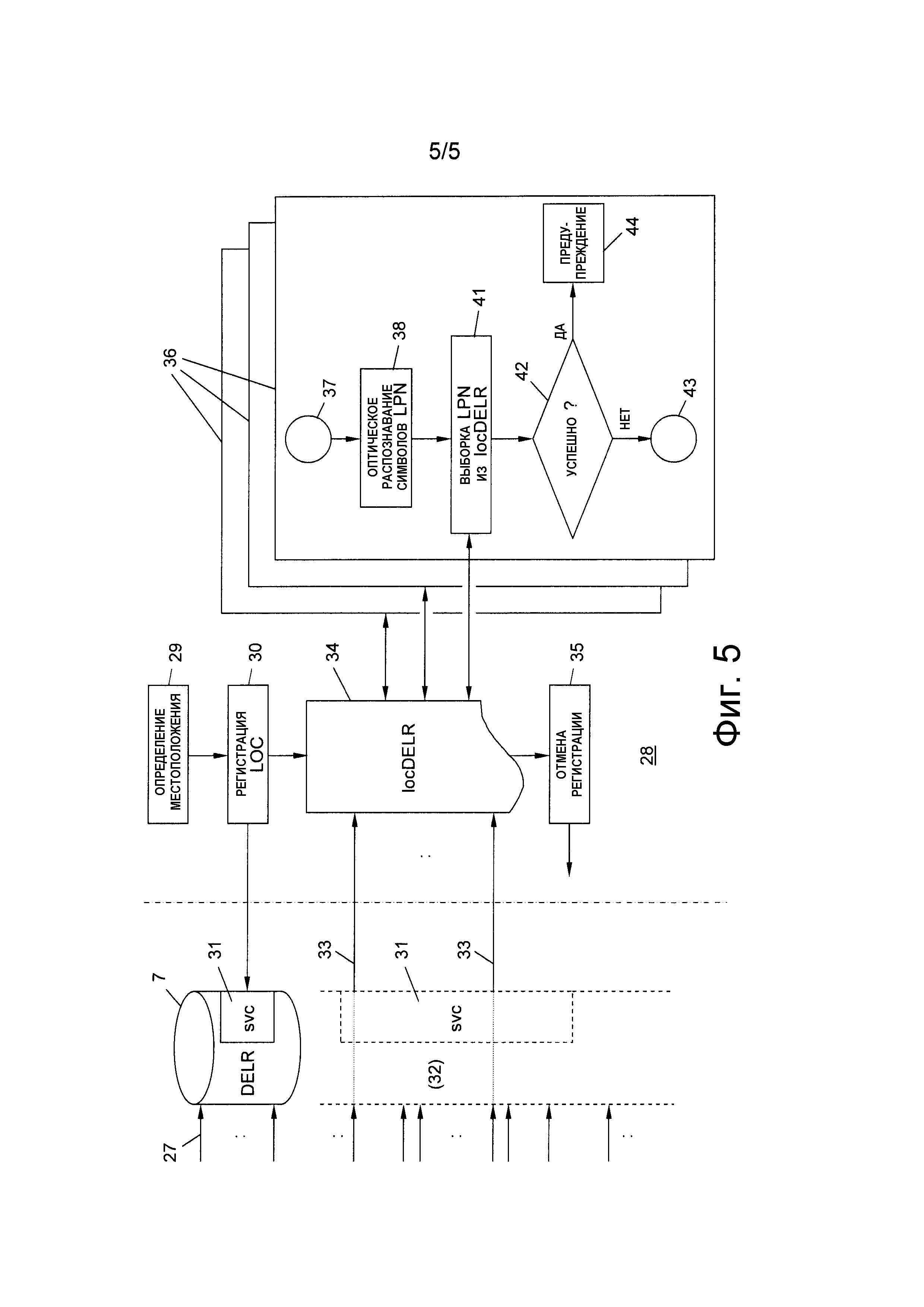
на чертеже Фиг. 5 изображена схема последовательности операций тех частей способа, которые выполняются в сервере регистрации нарушений и в контролирующем транспортном средстве.
На чертеже Фиг. 1 приведена схематичная иллюстрация системы 1 взимания дорожных сборов, в которой множество транспортных средств 2, с которых взимают дорожные сборы, движутся по дорожной сети, которая подробно не показана, например, по общенациональной дорожной сети. Систему 1 взимания дорожных сборов используют для взимания дорожных сборов (пошлин) за произвольное использование дороги транспортными средствами 2, и, в частности, как за использование проезжих частей для дорожного движения в форме дорожных сборов за проезд по шоссе, территории, за проезд или при пересечении границы, так и за использование проезжих частей для остановившегося транспорта, в форме платы за посещение или за парковку.
Для этого, согласно чертежам Фиг. 2 и Фиг. 3, все транспортные средства 2, с которых взимают дорожные сборы, оснащены бортовыми устройствами (OBU) 3, которые могут использоваться для определения местоположения транспортных средств 2, и, следовательно, с них могут взиматься дорожные сборы. Бортовые устройства (OBU) 3 могут представлять собой устройства разнообразных конструкций: бортовые устройства (OBU) 3 могут представлять собой устройства, ʺсами определяющие свое местоположениеʺ, то есть, которые могут сами непрерывно определять свое местоположение, например, посредством приемника спутниковой навигационной системы в качестве части спутниковой навигационной системы (глобальной спутниковой навигационной системы, GNSS) и сообщать сведения об определенных таким способом местоположениях (ʺзасечках местоположенияʺ) либо непосредственно в центр 4 обработки информации в системе 1 взимания дорожных сборов или по сети мобильной связи или по сети географически распределенных радиомаяков, либо в виде ʺабстрагированныхʺ транзакций по оплате дорожных сборов, вычисленных на основании сообщенных местоположений. В альтернативном варианте такие бортовые устройства (OBU) 3 глобальной спутниковой навигационной системы (GNSS) могут просто сохранять сведения о сообщенных местоположениях или о произведенных ими транзакциях по оплате дорожных сборов, или или снимать сумму пошлин, вычисленную на основании этих местоположений, с внутреннего кредитного счета для оплаты дорожных сборов. Бортовые устройства (OBU) 3 также могут представлять собой устройства, ʺместоположение которых определяют извнеʺ, например, с использованием множества маяков для взимания дорожных сборов или радиомаяков, которые географически распределены по системе 1 взимания дорожных сборов и которые устанавливают соответствующую ближнюю связь или специализированную связь на коротких расстояниях (DSRC) с проезжающими мимо бортовыми устройствами (OBU) 3 и определяют их местоположение относительно известных мест расположения радиомаяков, что обусловлено ограниченной дальностью связи. Сведения о соответствующих сообщенных местоположениях или о вычисленных на их основании суммах транзакций по оплате дорожных сборов могут быть затем сгенерированы бортовыми устройствами (OBU) 3 или радиомаяками для взимания дорожных сборов и подвергнуты обработке либо в бортовых устройствах (OBU) 3, либо в центре 4 обработки информации.
Для правильного вычисления дорожных сборов в системе 1 взимания дорожных сборов устанавливают один или большее количество параметров OC дорожного сбора, характерных для соответствующего транспортного средства 2, или сохраняют их в бортовых устройствах (OBU) 3. Параметры OC дорожного сбора могут представлять собой параметры любого произвольного типа и могут, например, предоставлять информацию о цели использования транспортного средства 2 (например, транспортное средство аварийно-спасательных служб, средство общественного транспорта, личный автомобиль, грузовик и т.п.), о статусе пользователя транспортного средства 2, о размере, о весе, об экологическом классе, о количестве осей транспортного средства 2 с прицепом или без него и т.п. Всякий раз при вычислении дорожного сбора либо во время обмена информацией с радиомаяком для взимания дорожных сборов, либо при вычислении сумм транзакций по оплате дорожных сборов на основании сообщенных местоположений, параметры OC дорожного сбора, взимаемого с OBU 3, используют для определения суммы дорожного сбора или даже для определения того, обязан ли быть уплачен дорожный сбор.
Как изложено ниже, рассматриваемые параметры OC дорожного сбора включают в себя те параметры, которые могут быть проверены (подвергнуты перепроверке) путем проверки внешнего вида, то есть, формы транспортного средства 2, транспортирующего OBU 3. В этом изобретении такие параметры OC дорожного сбора именуют зависящими от формы конкретного транспортного средства. Параметры OC дорожного сбора, зависящие от формы конкретного транспортного средства, могут, например, включать в себя один или большее количество габаритных размеров транспортного средства 2, сведения о конструкции его кузова (коробчатый кузов, кузов-платформа, кузов легкового автомобиля или кузов грузовика), о количестве осей, о количестве прицепов и т.п.
Устройства и способы управления, которые описаны ниже, пригодны для тех бортовых устройств (OBU) 3, для которых установленные или хранящиеся в них параметры OC дорожного сбора, зависящие от формы конкретного транспортного средства, могут быть считаны через интерфейс DSRC-радиосвязи, что имеет место, например, в случае бортовых устройств (OBU) с DSRC, соответствующих стандартам RFID, CEN-DSRC, UNI-DSRC,-G5 или WAVE (беспроводной доступ в среде транспортного средства). Также пригодными являются бортовые устройства (OBU) 3 GNSS, которые дополнительно содержат интерфейс DSRC-радиосвязи для считывания их параметров дорожного сбора для задач контроля, и они могут быть проверены описанным ниже способом.
Кроме того, само собой разумеется, что описанные здесь устройства и способы управления также способны выявлять даже то, оснащено ли транспортное средство 2, с которого взимают дорожный сбор, бортовым устройством (OBU) 3, и проверять функциональность OBU 3, поскольку для считывания параметров дорожного сбора необходимо правильно функционирующее OBU 3.
Наконец, описанные устройства и способы управления также способны обеспечивать обнаружение и наложение взысканий за обычные нарушения правил движения транспортными средствами 2, например, нарушения, связанные с превышением скорости, нарушения запретов на вождение (в ночное время) и другие нарушения правил движения, поскольку они могут быть автоматически обнаружены посредством измерительных устройств, датчиков и т.п.
Устройство контроля используется для вышеупомянутых задач контроля в системе 1 взимания дорожных сборов, которая состоит из первого парка регистрирующих транспортных средств 5, второго парка контролирующих транспортных средств 6 и сервера 7 регистрации нарушений в центре 4 обработки информации.
Предпочтительно предусмотрено наличие значительно большего количества контролирующих транспортных средств 6, чем регистрирующих транспортных средств 5. Отношение количества контролирующих транспортных средств 6 к количеству регистрирующих транспортных средств 5 предпочтительно составляет, по меньшей мере, 10:1, и предпочтительно составляет 100:1, 1000:1 и более. Как описано ниже, контролирующие транспортные средства 6 имеют более простую конструкцию чем регистрирующие транспортные средства 5 и функционируют с иным характером поведения при движении, что приводит к сбалансировавшему соотношению зон охвата для сфер действия регистрирующих и контролирующих транспортных средств при минимальных затратах. Регистрирующие транспортные средства 5 непрерывно движутся в транспортном потоке, и их взаимодействия с контролируемыми транспортными средствами 2 являются кратковременными, тогда как контролирующие транспортные средства 6 могут использоваться как в качестве мобильных средств, так и в качестве стационарных средств, и могут иметь более длительные взаимодействия с контролируемыми транспортными средствами 2, если они осуществляют проверки с остановкой или налагают взыскания за нарушения правил оплаты дорожных сборов.
Как показано на общем виде на чертеже Фиг. 1, регистрирующие транспортные средства 5 используют для выслеживания тех транспортных средств 2, которые совершают нарушения правил движения или правил оплаты дорожных сборов, например, совершают нарушение, связанное с превышением скорости, или которые содержат неисправное или неправильно установленное OBU 3, или вообще не содержат его, на соответственно заданных дальностях обнаружения, и передают эту информацию как сведения о нарушении правил движения или правил оплаты дорожных сборов в виде записи с данными о нарушении в сервер 7 регистрации нарушений; взаимодействия, которые имеют место с этой целью между регистрирующим транспортным средством 5 и транспортным средством 2, будут более подробно описаны ниже со ссылкой на чертежи Фиг. 2 и Фиг. 4. Контролирующие транспортные средства 6 используются для проверки транспортных средств 2, которые расположены в соответствующей окрестности 9, с учетом записей с данными о нарушениях, предоставленных для этих транспортных средств сервером 7 регистрации нарушений, и для выдачи предупреждающего сообщения, если для транспортного средства 2 существует запись с данными о нарушении. В этом случае экипаж контролирующего транспортного средства 6 может произвести соответствующую дополнительную проверку и предпринять принудительные меры, например, остановить транспортное средство 2, произвести проверку транспортного потока, взыскать добавочный дорожный сбор, наложить штраф и т.п. Взаимодействия, которые имеют место для этого между контролирующим транспортным средством 6, сервером 7 регистрации нарушений и транспортным средством 2, будут более подробно описаны ниже со ссылкой на чертежи Фиг. 3 и Фиг. 5.
Для этого регистрирующие транспортные средства 5, контролирующие транспортные средства 6 и сервер 7 регистрации нарушений соединены друг с другом беспроводной сетью, например, сетью мобильной связи, в частности, сетью стандарта GSM, UMTS или LTE, но также и спутниковыми сетями мобильной связи (например, сетью ʺИридиумʺ (Iridium)), предпочтительно через соединения с коммутацией пакетов. В альтернативном варианте возможно использование сети географически распределенных радиомаяков в системе 1 взимания дорожных сборов, например, DSRC-радиомаяка, посредством которого могут обмениваться информацией регистрирующие и контролирующие транспортные средства 5, 6 всякий раз, когда они проезжают мимо радиомаяка.
На чертежах Фиг. 2a и Фиг. 2b подробно показано одно из регистрирующих транспортных средств 5 в два последовательных момента времени, когда транспортное средство 2 на дороге 10 проезжает мимо во встречном транспортном потоке. Регистрирующее транспортное средство 5 оснащено DSRC-приемопередатчиком 11 для DSRC-радиосвязи с OBU 3 транспортного средства 2, устройством 12 считывания регистрационных номеров для автоматического считывания (оптического распознавания символов, OCR) регистрационного номера с номерного знака 13 транспортного средства 2 и датчиком 14, которым здесь является лазерное сканирующее устройство, для обнаружения параметра, характеризующего внешнюю форму транспортного средства 2, который ниже именуют параметром CL, характеризующим форму.
В данном примере параметром CL, характеризующим форму, является категория транспортного средства (ʺлегковой автомобильʺ, ʺдвухосный грузовикʺ, ʺтрехосный грузовикʺ, ʺчетырехосный грузовикʺ, ʺгрузовик с прицепомʺ и т.п.); однако, само собой разумеется, что в качестве параметра CL, характеризующего форму, может служить любая другая характеристика внешней формы транспортного средства 2, которая может быть определена посредством датчика 14, аналогичо вышеупомянутому параметру OC дорожного сбора, зависящему от формы конкретного транспортного средства.
Датчик 14 для обнаружения параметра CL, характеризующего форму, может быть выполнен любым способом, известным на предшествующем уровне техники, например, в виде электронной камеры, которая может записывать одного или большее количество изображений проезжающего мимо транспортного средства 2, в том числе, изображения с различных углов наблюдения, а эти изображения затем используют для извлечения соответствующих характеристик и параметров, характеризующие форму транспортного средства 2, посредством программы распознавания изображений. В альтернативном варианте датчиком 14 может являться радиолокационный или лазерный дальномер или лазерное сканирующее устройство, которое сканирует транспортное средство 2, когда оно проезжает мимо, с использованием радиолокационного или лазерного остронаправленного или веерного луча 15' для обнаружения одного или большего количества габаритных размеров или контуров проезжающего мимо транспортного средства 2 в виде профиля сканирования из облака точек сканирования.
Устройство 12 считывания регистрационных номеров, имеющееся в регистрирующем транспортном средстве 5, выполняет известную из предшествующего уровня техники процедуру считывания с оптическим распознаванием символов (OCR-считывания) официального регистрационного номера (LPN) на номерном знаке 13 транспортного средства 2 (ʺавтоматическое распознавание регистрационного номераʺ, ALNR); траектория формирования изображений или информационный поток схематично показаны стрелкой 16.
DSRC-приемопередатчик 11 регистрирующего транспортного средства 5 устанавливают DSRC-радиосвязь 17 с OBU 3 для: a) выявления того, точно ли в транспортном средстве 3 имеется OBU 3, b) проверки посредством этого (в неявном виде) того, отвечает ли OBU 3, которое, скажем, функционирует правильно, и c) для считывания параметра OC дорожного сбора, установленного или хранящегося в OBU 3, для его дальнейшего изучения. Во время этого изучения считанный параметр OC дорожного сбора, взимаемого с OBU 3, должен соответствовать параметру CL, характеризующему форму транспортного средства 2, обнаруженную датчиком 14. Например, если параметр OC дорожного сбора указывает ʺтрехосный грузовикʺ, то датчик 14 также должен обнаруживать не противоречащий ему параметр CL, характеризующий форму; в противном случае имеет место нарушение правил оплаты дорожных сборов, и транспортное средство 2 является ʺтранспортным средством-нарушителемʺ.
Само собой разумеется, что параметр OC дорожного сбора, считанный с OBU 3, может дополнительно зависеть от иных компонентов, чем форма транспортного средства, например, от состояния или от цели использования транспортного средства 2, от времени, от общих временных условий (например, от запрета на вождение ночью), от ограничений, наложенных на экологический класс транспортного средства, от скорости и т.п., что также может быть учтено при проверке нарушения.
Все компоненты регистрирующего транспортного средства 5, которыми являются DSRC-приемопередатчик 11, устройство 12 считывания регистрационных номеров и датчик 14, соединены друг с другом, возможно, но не обязательно, через контроллер (не показан), и, как описано выше, регистрирующее транспортное средство 2 может поддерживать беспроводную связь с центральным сервером 7 регистрации нарушений посредством устройства связи (не показано).
Теперь будет приведено более подробное описание принципа действия регистрирующего транспортного средства 5 и процедуры регистрации, которая производится тогда, когда мимо проезжает транспортное средство 2, со ссылкой на чертежи Фиг. 2 и Фиг. 4. Когда транспортное средство 2 приближается к регистрирующему транспортному средству 5 (операция 18), то при первой операции 19 считывают регистрационный номер (LPN) транспортного средства 2 с номерного знака 13 с использованием устройства 12 считывания регистрационных номеров (стрелка 16). В способе из Фиг. 4 операция 19 также может быть выполнена в любой более поздний момент времени, если не требуется результат считывания регистрационного номера (LPN), например это может быть сделано позже путем считывания заднего номерного знака 13 транспортного средства 2.
После этого выполняют операцию 20, при которой посредством датчика 14 обнаруживают параметр CL, характеризующий форму транспортного средства 2, в показанном примере это выполняют путем лазерного сканирования и обнаружения количества осей транспортного средства 2, на основании чего в качестве параметра CL, характеризующего форму, определяют категорию транспортного средства (ʺкатегориюʺ) на основании количества осей.
При следующей операции 21 принятия решения на основании параметра CL, характеризующего форму, проверяют, следует ли вообще взимать дорожные сборы с транспортного средства 2. Например, может быть установлено, что дорожный сбор не взимают с двухосных транспортных средств 2, и может быть установлено, что дорожный сбор взимают с транспортных средств 2 с более чем двумя осями. Если параметр CL, характеризующий форму, указывает, что дорожные сборы обязаны быть оплачены (ветвь ʺyʺ), то при следующей операции 22 устанавливают контакт с OBU 3, в котором используют DSRC-приемопередатчик 11 (стрелка 17). Для этого из OBU 3 считывают параметр OC дорожного сбора, и успешное считывание также указывает, что OBU 3 присутствует и функционирует. Затем выполняют следующую операцию 23 принятия решения, которая переключает процедуру выполнения операций непосредственно к операции 25 для генерации записи с данными о нарушении (DELR), если считывание является неуспешным (ветвь ʺnʺ).
В противном случае (ветвь ʺyʺ операции 23) при следующей операции 24 принятия решения проверяют, соответствуют ли обнаруженный параметр CL, характеризующий форму, и считанный параметр OC дорожного сбора друг другу, или согласуются ли они друг с другом, то есть, установлен ли параметр OC дорожного сбора для OBU 3 соответствующим параметру CL, характеризующему форму, который был обнаружен на основании внешней формы транспортного средства 2. Если это так (ветвь ʺyʺ), то все в порядке, и способ заканчивается операцией 26. Если же это не так (ветвь ʺnʺ), то существует несоответствие, которое является потенциальным нарушением правил оплаты дорожных сборов, и в способе переходя к выполнению операции 25 генерации записи с данными о нарушении (DELR).
При операции 25 генерируют запись с данными о нарушении (DELR), которая содержит обнаруженный параметр CL, характеризующий форму, считанный параметр OC дорожного сбора и результат считывания регистрационного номера (LPN), и возможно, но не обязательно, другие данные, такие как, например, сведения о текущем местоположении (ʺместе, где произошло нарушениеʺ) DO и о текущем моменте времени (ʺвремени нарушенияʺ) DT процесса записи, дополнительные основные данные, считанные с OBU 3, такие как, например, идентификатор OBU (OID), основные данные пользователя, основные данные транспортного средства и т.п.
Место DO, где произошло нарушение, может быть определено множеством разнообразных способов: регистрирующее транспортное средство 5 может быть оснащено отдельным устройством определения местоположения, например приемником спутниковой навигационной системы, и может записывать текущее место проезда транспортного средства как место DO, где произошло нарушение. В альтернативном варианте OBU 3, в особенности, если оно представляет собой устройство такого типа, которое само определяет свое местоположение, может делать сведения о своем текущем местоположении доступными для регистрирующего транспортного средства 5 как о месте DO, где произошло нарушение. Известные местоположения соседних радиомаяков системы 1 взимания дорожных сборов на основе радиомаяков также могут использоваться для аппроксимации.
Затем выполняют операцию 27, при которой запись с данными о нарушении (DELR) передают в сервер 7 регистрации нарушений для ее дальнейшего использования контролирующими транспортными средствами 6.
Само собой разумеется, что операции 19-24 также могут выполняться в ином порядке, если отсутствует необходимость в результатах выполнения одной из них для выполнения другой.
Ниже будет приведено описание операций, выполняемых в сервере 7 регистрации нарушений и в приведенном в качестве примера контролирующем транспортном средстве 6, со ссылкой на чертежи Фиг. 3 и Фиг. 5. На чертежах Фиг. 3a и Фиг. 3b показана ситуация, когда контролирующее транспортное средство 6 проезжает мимо контролируемого транспортного средства 2 в два последовательных момента времени. При подготовке к такой проверке (или во время нее) сервер 7 регистрации нарушений избирательно предоставляет в контролирующие транспортные средства 6 те записи с данными о нарушениях (DELR), которые являются результатом нарушений в его соответствующей окрестности 9.
Для этого во время этапа 28 регистрации каждое контролирующее транспортное средство 6 регистрирует свое собственное местоположение LOC (или непосредственно его окрестность 9) в сервере 7 регистрации нарушений. Текущее местоположение LOC (или окрестность 9) контролирующего транспортного средства 6 может быть определено (может быть определена) им автономно, например, при операции 29 определения местоположения, например, при помощи приемника спутниковой навигационной системы, на основании информации от соседних радиомаяков и т.п. В альтернативном варианте информация о местоположении LOC или об окрестности 9 также может быть введена пользователем вручную в устройстве ввода данных, имеющемся в контролирующем транспортном средстве 6, при операции 29.
Во время следующей операции 30 регистрации контролирующее транспортное средство 6 регистрирует свое местоположение LOC (или окрестность 9) в сервере 7 регистрации нарушений, который открывает специализированное задание 31 для каждого зарегистрированного контролирующего транспортного средства 6.
Используя задание 31, сервер 7 регистрации нарушений может ʺотфильтровыватьʺ (этап 32) все записи с данными о нарушениях (DELR), поступившие при операции 27, и записи с данными о нарушениях (DELR), поступающие после этого, особым для каждого конкретного местоположения способом. Для этого сервер регистрации нарушений проверяет, находится ли место DO, где произошло нарушение, из записи с данными о нарушении (DELR) в пределах окрестности 9 местоположения LOC контролирующего транспортного средства 6, и, если это так, то делает эту запись с данными о нарушении (DELR) доступной для этого контролирующего транспортного средства 6 (операция 33). Контролирующее транспортное средство 6 добавляет предоставленные таким образом записи с данными о нарушениях (DELR) в локальный перечень 34 записей с данными о нарушениях (locDELR).
При операции 33 предоставление записей с данными о нарушениях (DELR), которые были отфильтрованы особым для каждого конкретного местоположения способом, может производиться как непрерывно, например, периодически или по мере необходимости, при этом, например, сервер 7 регистрации нарушений передает каждую отдельную запись с данными о нарушении (DELR) в контролирующее транспортное средство 6, так и в виде пакетов (с использованием пакетной обработки), при этом контролирующее транспортное средство 6 находит те записи с данными о нарушениях (DELR), которые были предоставлены в конкретный момент времени из сервера 7 регистрации нарушений, или принимает их переданными из сервера.
В произвольный момент времени (DT), когда было совершено нарушение, записи с данными о нарушениях (DELR) также имеют соответствующую ʺотметку времениʺ, которая может ограничивать срок действия сообщений. Например, записи с данными о нарушениях (DELR), которые являются ʺслишком старымиʺ, то есть, которые имеют отметки времени (DT), выходящие за пределы заданного промежутка времени, могут быть автоматически аннулированы как в сервере 7 регистрации нарушений, так и в контролирующем транспортном средстве 6, и/или сервер 7 регистрации нарушений может сделать доступными для контролирующего транспортного средства 6 только ʺтекущиеʺ записи с данными о нарушениях (DELR), то есть, те, которые имеют отметки времени (DT), не выходящие за пределы заданного промежутка времени.
Таким образом, во время этапа 28 регистрации контролирующие транспортные средства 6, по существу, ʺабонируютʺ получение записей с данными о нарушениях (DELR) из их окрестностей 9, пока при операции 35 ими не будет передан в сервер 7 регистрации нарушений запрос на отмену регистрации, после чего он аннулирует задание 31.
Таким образом, в контролирующие транспортные средства 6 предоставляют соответствующие текущие и специфичные для конкретного местоположения записи с данными о нарушениях (DELR) из их окрестностей 9, и при проезде мимо транспортного средства 2 или при его проверке они могут выполнять задания 36 по контролю с использованием соответствующего локального перечня 34 записей с данными о нарушениях.
Согласно чертежам Фиг. 3 и Фиг. 5, во время выполнения каждого задания 36 по контролю при приближении транспортного средства 2 (операция 37) выполняют первую операцию 38, при которой производят автоматическое считывание регистрационного номера (LPN) с номерного знака 13 с использованием устройства 39 считывания регистрационных номеров, имеющегося в контролирующем транспортном средстве 6 (стрелка 40). После этого выполняют операцию 41, при которой контролирующее транспортное средство 6 выбирает соответствующую запись с данными о нарушении (DELR) из локального перечня 34 записей с данными о нарушениях, если такая запись существует. В случае отсутствия записи с данными о нарушении (DELR) для результата считывания регистрационного номера (LPN) (ветвь ʺnʺ в операции 42 проверки) выполнение задания 36 завершают операцией 43, и результат считывания регистрационного номера (LPN) может быть снова удален, например, из соображений обеспечения конфиденциальности. Однако, если для результата считывания регистрационного номера (LPN) запись с данными о нарушении (DELR) существует (ветвь ʺyʺ), то в способе совершают условный переход к операции 44 выдачи предупреждения, при которой контролирующее транспортное средство 6 выдает экипажу предупреждающее сообщение.
Предупреждающим сообщением может являться, например, оптическое или акустическое предупреждение, или информация, выводимая на экран дисплея, которое (которая) также указывает считанный регистрационный номер LPN и запись с данными о нарушении (DELR). В этом случае экипаж может предпринять надлежащие принудительные меры, например, остановить транспортное средство 2, произвести дополнительную проверку OBU 3 и, возможно, но не обязательно, взыскать добавочный дорожный сбор или наложить штраф. В дополнение к этому, предупреждающее сообщение может быть автоматически отображено на устройстве 47 сигнализации, имеющемся в контролирующем транспортном средстве 6, которое является видимым снаружи для проверяемого транспортного средства 2 (стрелка 48), для напоминания ему о необходимости остановиться, например, с использованием флуоресцирующей надписи ʺОСТАНОВИТЕСЬʺ.
Возможно, но не обязательно, дополнительно при выполнении задания 36 также может быть снова произведено считывание информации с OBU 3 с использованием DSRC-приемопередатчика 45 контролирующего транспортного средства 6 (стрелка 46), например, для дополнительных проверок непротиворечивости или для идентификаций.
Сервер 7 регистрации нарушений может быть оснащен алгоритмами оценки, посредством которых выполняют оценку изменений мест DO, где произошли нарушения, (как ʺпоследних местонахожденийʺ транспортных средств-нарушителей 2) по времени на основании скоростей и направлений движения транспортных средств 2, которые были измерены в момент регистрации нарушения, но это не является обязательным условием. Для этого регистрирующее транспортное средство 5 может быть оснащено устройством 49 для измерения скорости и направления движения, то есть, вектора v движения транспортного средства 2. Устройство 49 также может быть реализовано посредством устройства 12 считывания регистрационных номеров, выполненного в виде видеокамеры, и в полученных при помощи которой изображениях могут быть обнаружены перемещения, или посредством DSRC-приемопередатчика 11, выполненного в виде радиолокатора на эффекте Допплера, или посредством надлежащих измерений с использованием датчика 14, например, измерений при помощи лазера или лазерного локатора (LIDAR) со сканирующим лучом или веерным лучом 15.
Кроме того, для обнаружения распространенных нарушений правил движения транспортных средств 2, например, для обнаружения нарушений, связанных с превышением скорости, могут использоваться устройства 11, 12, 14, 49 измерения скорости, которыми снабжено регистрирующее транспортное средство 5.
Сведения о векторе v движения транспортного средства 2 в тот момент времени (DT), когда произошло нарушение, могут быть включены в состав записи с данными о нарушении (DELR) и переданы в сервер 7 регистрации нарушений. В этом случае сервер 7 регистрации нарушений может экстраполировать или оценивать потенциально возможные новые местоположения DO транспортного средства 2 в более поздние моменты времени, также с обеспечением поддержки карт дорожной сети для дорожной сети, и учитывать их во время этапа 32 для тех моментов времени, в которые производят выбор записей с данными о нарушениях (DELR), соответствующих окрестности 9 контролирующего транспортного средства 6. Таким образом, на основании экстраполяции записи с данными о нарушениях (DELR) транспортных средств 2, в которых места DO, где произошли нарушения, прежде находились вне окрестности 9 местоположения LOC контролирующего транспортного средства 6, позднее могут находиться в пределах окрестности 9 и, таким образом, могут быть сделаны доступными для этого контролирующего транспортного средства 6 или для его локального перечня 34 записей с данными о нарушениях.
Таким образом, окрестности 9 контролирующих транспортных средств 6 динамически адаптируют по времени. Кроме того, окрестности 9 могут быть специально адаптированы к условиям дорожной сети, по которой движется контролирующее транспортное средство 6, для учета также и его движения: в этом случае окрестности 9 больше не являются кругами (как схематично показано на чертеже Фиг. 1), а являются динамически адаптированными в соответствии с собственными перемещениями контролирующего транспортного средства 6 и с его возможностями совершать повороты в дорожной сети, например, они являются адаптированными в форме эллипса или имеющими древовидную форму для того, чтобы всегда выбирать из сервера 7 регистрации нарушений и добавлять в локальный перечень 34 записей с данными о нарушениях (locDELR) те записи с данными о нарушениях (DELR), для которых вероятность того, что контролирующее транспортное средство 6 встретится с этими транспортными средствами-нарушителями 2 во время движения контролирующего транспортного средства, является наибольшей. В альтернативном варианте могут быть заданы окрестности 9 любой произвольной формы.
Таким образом, настоящее изобретение не ограничено продемонстрированными вариантами его осуществления, а охватывает собой все варианты и модификации, не выходящие за пределы объема, определяемого прилагаемой формулой изобретения.
Адаптивное конкурентное окно в прерывистых каналах беспроводной связи
Мобильные устройства и способы контроля транспортных средств
Способ и устройство для обнаружения вращающегося колеса
Способ и устройство детектирования колес
Способ дорожного сбора с транспортных средств в открытой системе платной дороги
Способ управления для системы взимания дорожных сборов
Способ управления для системы взимания дорожных сборов
Контролирующее транспортное средство для системы взимания платы за проезд
Устройства и способы управления для системы взимания дорожных сборов
Способ детектирования колеса транспортного средства
Адаптивное конкурентное окно в прерывистых каналах беспроводной связи
Мобильные устройства и способы контроля транспортных средств
Способ и устройство для обнаружения вращающегося колеса
Способ и устройство детектирования колес
Способ дорожного сбора с транспортных средств в открытой системе платной дороги
Способ управления для системы взимания дорожных сборов
Способ управления для системы взимания дорожных сборов
Контролирующее транспортное средство для системы взимания платы за проезд
Устройства и способы управления для системы взимания дорожных сборов
Способ детектирования колеса транспортного средства

