Результат интеллектуальной деятельности: МОБИЛЬНЫЕ УСТРОЙСТВА И СПОСОБЫ КОНТРОЛЯ ТРАНСПОРТНЫХ СРЕДСТВ
Вид РИД
Изобретение
Изобретение относится к мобильному устройству контроля транспортных средств. Настоящее изобретение также относится к одному из способов осуществления подобного контроля.
При осуществлении контроля за скоростью транспортных средств данные замеров часто объединяются с зарегистрированными изображениями транспортных средств таким образом, чтобы можно было точно выявить нарушения правил дорожного движения. Если подобный контроль осуществляется с мобильной подвижной платформы, то в настоящее время для этого требуется проведение сложных ручных операций сопоставления данных замеров скорости зарегистрированным изображениям и наоборот, поскольку зоны обнаружения обычных датчиков определения скорости и камер видеорегистрации никогда полностью не совпадают. Поэтому, а также из-за того, что относительные скорости движения в транспортном потоке постоянно меняются, могут возникать несоответствия между различными зарегистрированными изображениями и данными замеров скорости, что не позволяет добиться абсолютного соответствия.
Поставленная цель изобретения заключается в том, чтобы предложить мобильные устройства и способы контроля, которые позволяют осуществлять контроль за транспортными средствами в потоке транспорта, по существу, в автоматическом режиме, т.е. осуществлять контроль за движущимися транспортными средствами с использованием подвижных контрольных платформ.
По первому аспекту изобретения данная цель достигается при помощи мобильного устройства контроля, оснащенного датчиком для измерения скорости транспортных средств, проезжающих через первую зону обнаружения, упомянутый датчик предоставляет данные замеров скорости проезжающих транспортных средств с временной меткой; датчик, по меньшей мере, косвенно определяет геометрию, предпочтительно длину, транспортных средств, проезжающих через вторую зону обнаружения, упомянутый датчик предоставляет данные замеров геометрии проезжающих транспортных средств с временной меткой;
видеокамерой для регистрации изображений транспортных средств, проезжающих через третью зону обнаружения, упомянутая видеокамера предоставляет изображения каждого проезжающего транспортного средства с временной меткой; а также
оценочным устройством, подключенным к видеокамере и упомянутым датчикам, которое выполнено с возможностью
расчета на основании данных замеров скорости, их временной метки и первой зоны обнаружения, а также на основании данных замеров геометрии, их временной метки и второй зоны обнаружения, места и времени, при которых проезжающее транспортное средство должно оказаться в третьей зоне обнаружения для того, чтобы по ним определить соответствующее изображение на основании его временной метки и третьей зоны обнаружения.
По второму аспекту цель изобретения достигается при помощи способа контроля транспортных средств, состоящего из следующих этапов, осуществляемых в любой последовательности:
измерение скорости транспортных средств, проезжающих через первую зону обнаружения, и предоставление данных замеров скорости с временной меткой;
по меньшей мере, косвенное измерение геометрии, предпочтительно длины, транспортных средств, проезжающих через вторую зону обнаружения, и предоставление данных замеров по геометрии с временной меткой;
регистрация изображений транспортных средств, проезжающих через третью зону обнаружения, и предоставление каждого изображения с временной меткой;
помимо этого, во время последующих этапов осуществляется:
расчет на основании данных замеров скорости, их временной метки и первой зоны обнаружения, а также на основании данных замеров геометрии, их временной метки и второй зоны обнаружения, места и времени, при которых проезжающее транспортное средство должно оказаться в третьей зоне обнаружения; а также
определение по ним соответствующего изображения на основе его временной метки и третьей зоны.
Изобретение учитывает различие в зонах обнаружения индивидуальных датчиков и видеокамер подвижного устройства контроля и рассчитывает предполагаемые значения параметров перемещения контролируемого транспортного средства в пределах зон обнаружения таким образом, чтобы изображения транспортного средства, зарегистрированные в одной зоне обнаружения, могли автоматически привязываться к данным замеров скорости в другой зоне обнаружения.
Используемый здесь термин «зона обнаружения» включает в себя любые прилегающие области, которые могут быть охвачены датчиками или видеокамерами из текущего местоположения мобильного устройства контроля, причем это может быть конусообразный, пирамидальный, призматический, линейный, плоский и т.д. сегмент области и т.п.
Расчет также может осуществляться во время последующей обработки, т.е. зоны обнаружения или временные метки также могут присваиваться после того, как все индивидуальные замеры были проведены и сохранены в памяти.
Дополнительные датчики, данные с которых сопоставляются с соответствующим проезжающим транспортным средством при помощи рассмотренного способа, также могут использоваться, в принципе, в качестве: газоанализаторов, датчиков шума, температурных датчиков для проверки шин или тормозных систем, видеодатчиков для проверки шин, для проверки маркировки опасных грузов, знаков, наклеек и т.п.
Все упомянутые изображения также могут быть одним из элементов видеоряда.
Особо предпочтительный вариант осуществления изобретения, используемый для контроля за транспортными средствами, оборудованными устройствами DSRC OBU (бортовыми устройствами специализированной связи малого радиуса действия), такими, которые, например, используются в специализированной связи малого радиуса действия (DSRC связи) на платных дорогах, отличается тем, что используются приемопередатчики DSRC для связи с устройствами DSRC OBU транспортных средств, проезжающих через четвертую зону обнаружения, упомянутый приемопередатчик DSRC после каждого прохождения транспортного средства передает данные по сеансу связи DSRC с временной меткой, причем оценочное устройство дополнительно выполнено с возможностью сопоставления соответствующего сеанса связи DSRC зарегистрированному изображению по его временной метке и четвертой зоне обнаружения.
Соответствующий предпочтительный вариант осуществления способа по изобретению отличается наличием дополнительных этапов осуществления связи DSRC с устройствами DSRC OBU транспортных средств, проезжающих через четвертую зону обнаружения, добавлением временной метки в каждое сообщение DSRC, а также определением соответствия сеанса связи DSRC зарегистрированному изображению по его временной метке и четвертой зоне обнаружения.
Устройства DSRC OBU используются в системах DSRC платных дорог для осуществления DSRC связи с придорожными радиомаяками (придорожным оборудованием, т.н. RSE). Сообщения DSRC в конечном итоге завершаются транзакциями по взиманию оплаты системами платных дорог. Мобильные платформы контроля также используются для контроля за транспортными средствами, оборудованными устройствами DSRC OBU, и опроса устройств DSRC OBU транспортных средств в транспортном потоке для получения от них данных для контроля транзакций по взиманию оплаты, генерируемых системами платных дорог, либо просто для проверки наличия рабочего устройства DSRC OBU на транспортном средстве. Подобный вид контроля представляет дополнительную сложность тем, что приемо-передающие радиусы приемопередатчика DSRC мобильного устройства контроля и устройства DSRC OBU контролируемого транспортного средства в накладывающемся диапазоне, используемом для передачи радиосообщений, образуют зону обнаружения, которая может существенно отличаться от зон обнаружения других датчиков и камер мобильного устройства контроля. Это создает проблему при сопоставлении сеансов связи DSRC зарегистрированным изображениям с целью выявления нарушений. Изобретение решает данную проблему за счет расчета предполагаемых значений для места и времени, где или когда транспортное средство, с которым осуществлялся сеанс связи DSRC, окажется в зоне обнаружения видеокамеры, что позволяет точно сопоставить изображение сеансу связи DSRC.
Следует понимать, что по данному варианту осуществления определение данных замеров скорости при сопоставлении сеансов связи DSRC изображениям возможно лишь в качестве промежуточного результата, т.е. они не являются выходным сигналом или итоговым результатом устройства контроля или непосредственно самого способа контроля, а лишь используется при расчете упомянутых предполагаемых значений и соответственно для сопоставления сеансов связи DSRC изображениям.
Скорость транспортных средств, на самом деле, может измеряться любым образом, известным из уровня техники. По первому предпочтительному варианту осуществления изобретения, направленному на системы DSRC, скорость измеряется при помощи приемопередатчика DSRC непосредственно самого мобильного устройства контроля, предпочтительно на основе доплеровского сдвига частоты сеансов связи DSRC, т.е. измерения относительной скорости на основе доплеровского эффекта, возникающего при передаче радиосообщений. Соответственно, по данному варианту осуществления первая и четвертая области обнаружения совпадают, поскольку в качестве датчика измерения скорости выступает непосредственно сам приемопередатчик DSRC. По данному варианту осуществления установка дополнительных датчиков измерения скорости не требуется.
По альтернативному предпочтительному варианту осуществления, подходящему также и для транспортных средств, не оборудованных устройствами DSRC OBU, скорость измеряется при помощи лазерного сканера мобильного устройства контроля либо за счет оценки двух последовательных изображений с видеокамеры.
Геометрия, например количество осей, длина или высота, проезжающих транспортных средств, предпочтительно также может определяться при помощи подобного лазерного сканера. Например, лазерный сканер может направлять сканирующий луч на транспортное средство в плоскости, расположенной перпендикулярно или под углом к направлению движения. Зная количество осей или высоту транспортного средства, определенные подобным образом, можно узнать соответствующую геометрию, например длину, транспортного средства с использованием таблицы, содержащей информацию по количеству осей или высоте транспортных средств и геометрии транспортных средств, обычно связанной с ними. Как вариант, приемопередатчик DSRC может выступать в качестве датчика измерения геометрии, который принимает данные по транспортному средству от устройства DSRC OBU, являющегося частью системы связи DSRC, и на основании подобных данных осуществляет расчет геометрии, предпочтительно длины, транспортного средства, в этом случае вторая и четвертая зоны обнаружения совпадают. Кроме этого, данные с датчика геометрии также могут использоваться для последующей проверки достоверности, например, определения объема транспортного средства, класса транспортного средства и т.п., опять же для перепроверки зарегистрированных изображений, замеров скорости и/или перепроверки сеансов связи DSRC с целью подтверждения соответствия.
Другие признаки и преимущества изобретения станут понятны из последующего описания предпочтительного, типового варианта осуществления со ссылкой на прилагаемые чертежи, где
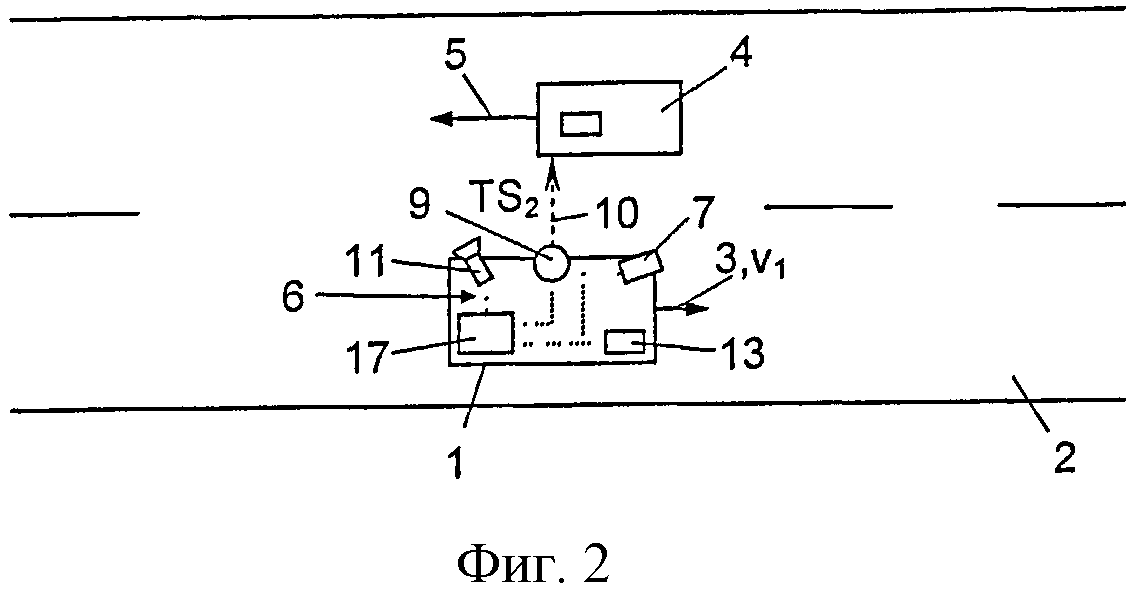
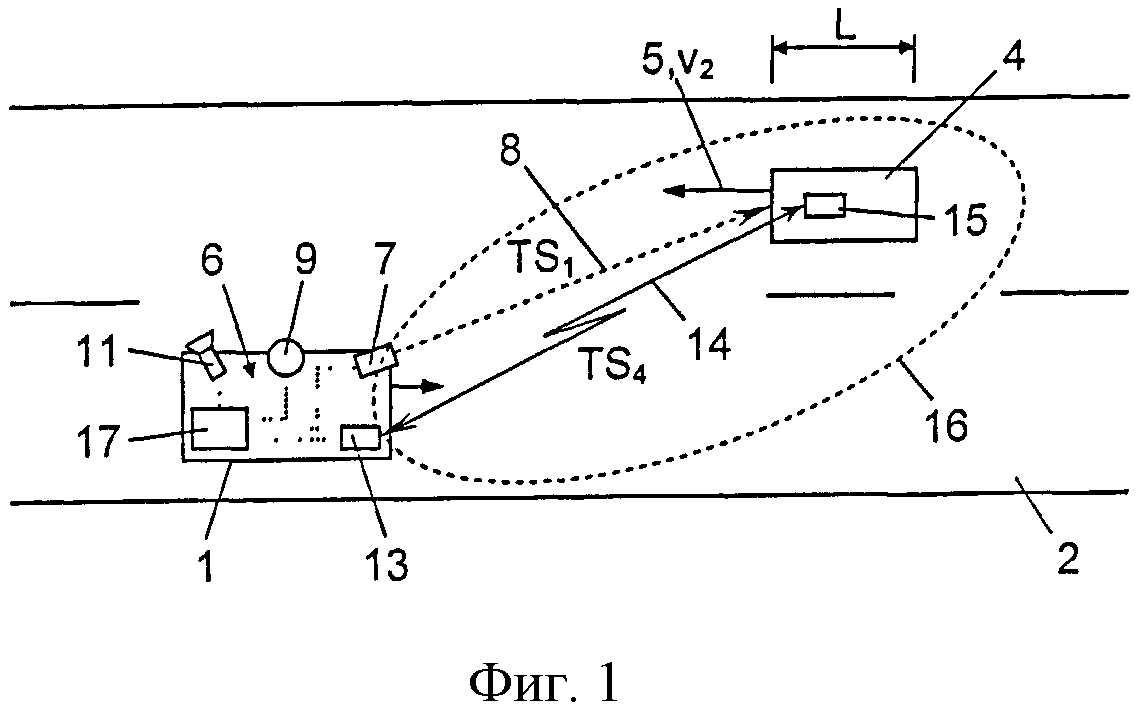
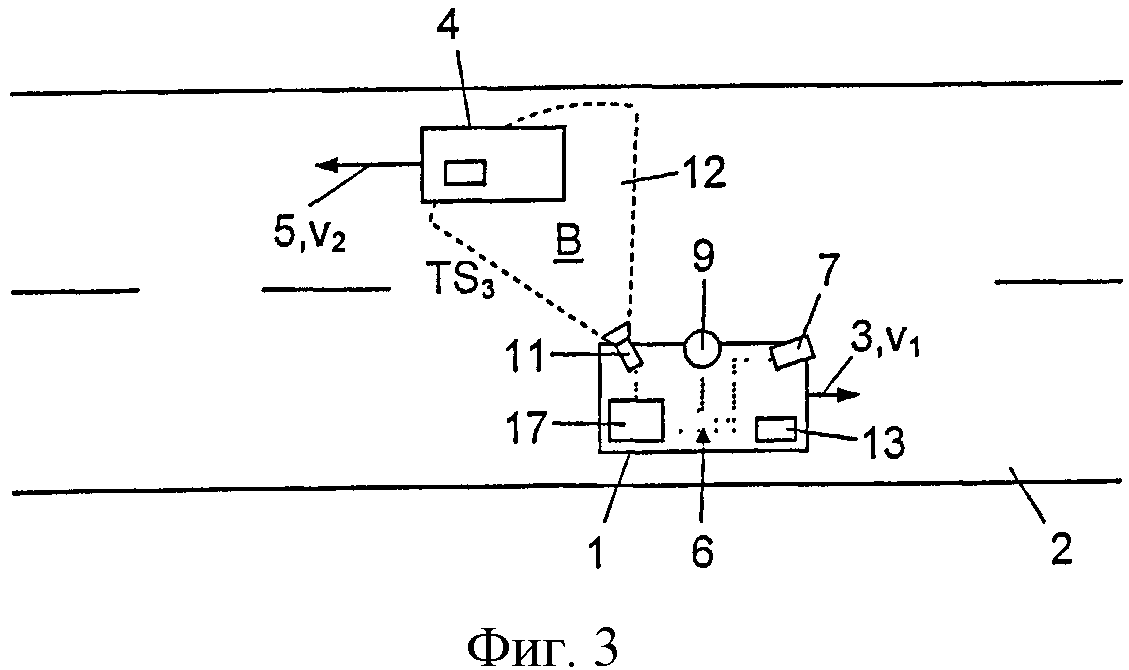
на фигурах с 1 по 3 показано мобильное устройство контроля, установленное на контрольном транспортном средстве для осуществления контроля за транспортными средствами в транспортном потоке, в трех разных положениях, которые также иллюстрируют три этапа способа по изобретению.
Со ссылкой на фигуры с 1 по 3 соответственно показано контрольное транспортное средство, движущееся по одной из полос дороги 2 в направлении движения 3 со скоростью v1. Контрольное транспортное средство 1 используется для контроля за другими транспортными средствами 4 в транспортном потоке на дороге 2, которые в приведенном примере движутся по противоположной полосе дороги 2, в противоположном направлении движения 5 со скоростью v; и следуют в непрерывном транспортном потоке мимо контрольного транспортного средства 1. Между тем, следует понимать, что контрольное транспортное средство 1 также может контролировать транспортные средства 4, следуя с ними в попутном направлении, а также, что одно или несколько транспортных средств 1, 4 могут временно останавливаться в транспортном потоке с частыми остановками. Различные направления движения 3, 5 и скорости v1, v2 контрольного транспортного средства 1 и контролируемых транспортных средств 4 создают условия, изменяющиеся во времени, которые не позволяют контрольному транспортному средству 1 точно определить геометрические размеры транспортного средства 4.
Для контроля за транспортным средством 4 контрольное транспортное средство 1 оборудовано мобильным устройством 6 контроля, которое включает в себя следующие компоненты, некоторые из которых могут также дублироваться:
первый датчик 7 для измерения относительной скорости vr=v2-v1 транспортного средства 4 относительно транспортного средства 1, когда упомянутое транспортное средство 4 находится в зоне 8 обнаружения датчика 7 или следует через нее;
второй датчик 9, который, по меньшей мере, косвенно измеряет геометрию, в данном случае длину L, транспортного средства 4, когда оно находится в зоне 10 обнаружения датчика 9;
по меньшей мере, одну видеокамеру 11 для регистрации изображения В транспортного средства 4, когда оно находится в зоне 12 обнаружения видеокамеры 11 или следует мимо нее;
(необязательный) приемопередатчик 13 DSRC, который может осуществлять радиообмен 14 с (необязательным) устройством 15 DSRC OBU транспортного средства 14, когда оно находится в зоне 16 обнаружения приемопередатчика 13 DSRC или следует через нее;
зона 16 обнаружения является пересечением зоны радиоприема приемопередатчика 13 DSRC и зоны радиоприема устройства 15 DSRC OBU; а также
оценочное устройство 17, соединенное с вышеупомянутыми компонентами.
Во время использования датчик 7 измеряет (относительную) скорость vr проезжающих транспортных средств 4 и передает данные с каждым замеренным значением vr с соответствующей временной меткой TS1 времени замера. Зная скорость v1 транспортного средства 1, по относительной скорости vr можно определить скорость v2 транспортного средства 4.
Аналогичным образом датчик 9 измеряет, по меньшей мере, один из геометрических параметров проезжающих транспортных средств 4, в данном случае длину L, и передает данные с каждым замеренным значением геометрических параметров с соответствующей временной меткой TS2 времени замера. Видеокамера 11 фотографирует транспортные средства 4, следующие через зону 12 обнаружения, и присваивает каждому зарегистрированному изображению 11 временную метку TS3 времени замера. Как вариант, приемопередатчик 13 DSRC поддерживает связь 14 DSRC с устройствами 15 DSRC OBU проезжающих транспортных средств 4 и сохраняет в памяти каждый осуществленный сеанс связи 15 DSRC с временной меткой TS4 времени его осуществления.
Оценочное устройство 17 связывает данные замеров скорости, данные замеров геометрии, изображения с видеокамеры и сеансы связи DSRC, полученные от датчиков 5, 9, видеокамеры 11 и необязательного приемника 13 DSRC, с учетом их соответствующих временных меток TS1-TS4 и зон 8, 10, 12, 16 обнаружения, для сопоставления их друг с другом. Поскольку соответствующие зоны 8, 10, 12 и 16 обнаружения относительно системы координат устройства 6 контроля известны, например образованы пространственным углом, плоскостями, секторами и т.п., из данных замеров скоростей, данных замеров геометрии, изображений с видеокамеры и/или сеансов связи DSRC, происходивших в соответствующие отрезки времени 151, 152, 153, 154, то предполагаемые значения могут быть рассчитаны для места и времени, где или когда проследует транспортное средство, являющееся транспортным средством 4, в зоне 12 обнаружения видеокамеры 11, таким образом, чтобы с ним можно было сравнить изображения В с временными метками TS3, зарегистрированные видеокамерой 11 в зоне обнаружения 12. Таким образом, для каждого замеренного значения vr скорости можно найти соответствующее ему изображение В и наоборот, даже если зоны 8, 12 обнаружения датчиков 7 скорости и видеокамеры 11 не совпадают. Также для исключения несоответствий производится оценка геометрии транспортного средства, в частности числа осей А и/или длины L транспортного средства, например, для подтверждения транспортного средства 4, зарегистрированного на изображении В на основании его длины, определенной по изображению, и сравнении ее с длиной L, замеренной датчиком 9, либо для осуществления выбора из нескольких транспортных средств 4, зарегистрированных на одном и том же изображении В вследствие плотного движения.
По одному из вариантов осуществления данные vr или v2 замеров скорости транспортного средства 4, определяемые подобным образом, также могут использоваться для сопоставления сеанса связи 14 DSRC с зарегистрированным изображением В, но лишь в качестве промежуточного результата. Таким образом, зная зону 16 обнаружения приемопередатчика 13 DSRC, вышеупомянутые данные замеров скорости и геометрии, полученные от датчиков 7, 9, зоны 8, 10 обнаружения, временные метки TS1-TS4 и сеансы связи DSRC с транспортным средством 4 также могут быть сопоставлены с соответствующим изображением В транспортного средства 4. Для этого измеренный или рассчитанный вектор скорости v2 транспортного средства 4 и известный вектор скорости v1 контролирующего транспортного средства 1 сравниваются, например, с соответствующими временными метками TS1-TS4 и зонами 8, 10, 11, 12, 16 обнаружения для определения или экстраполирования места и времени, где и когда транспортное средство 4, с которым осуществлялся сеанс связи 14 DSRC, должно появиться в зоне 12 обнаружения видеокамеры 11 для сравнения его с изображением В с видеокамеры 11, причем временная метка TS3 и положение транспортного средства 4, зарегистрированного на изображении В, совпадают с подобными данными обнаружения.
В качестве датчика 7 измерения скорости и датчика 9 измерения геометрии могут использоваться любые типы датчиков, известные из уровня техники. По первому варианту осуществления в качестве датчика 9 измерения геометрии используется лазерный сканер, который, например, направляет сканирующий луч в плоскости, расположенной перпендикулярно или под углом к направлению движения, т.е. зона 10 обнаружения является плоскостью, а транспортное средство 4 сканируется во время перемещения контролирующего транспортного средства 1 и/или транспортного средства 4 для создания 3-мерного изображения транспортного средства 4.
Длина L транспортного средства на подобных 3-мерных изображениях транспортного средства 4 зачастую искажена из-за скорости v2 транспортного средства. В этом случае длина L транспортного средства может определяться косвенно; так, например, по корректно определенной высоте транспортного средства (или объему транспортного средства) можно определить конкретный класс транспортного средства, например легковой автомобиль, грузовик, грузовик с прицепом и т.д., для которого можно определить конкретную типичную длину L транспортного средства. Для этого в датчике 9 может иметься, например, таблица с типичной высотой транспортных средств и соответствующей длиной транспортных средств, а датчик может определять соответствующую, но лишь приблизительную, длину L транспортного средства 4 по измеренной высоте транспортного средства.
Как вариант, датчик 9, например, может быть 3-мерным лазерным сканером, позволяющим моментально получать 3-мерное изображение соответствующего транспортного средства 4, почти с фотографической точностью, за один проход, по которому можно непосредственно определить геометрию, например длину L, транспортного средства.
Еще одним альтернативным решением может быть, например, датчик 9, определяющий число осей А у транспортного средства 4, например, при помощи лазерного сканирования, или лидара, или измерений радаром на основе доплеровского сдвига частоты вращающихся колес транспортного средства 4. В датчике 9 также может, например, иметься таблица с длиной L транспортных средств или габаритами, обычно соответствующими конкретному количеству осей А, поэтому он может определять соответствующую, но лишь приблизительную, геометрию, например длину L, транспортного средства 4.
Датчик 7 измерения скорости также может быть выполнен в виде лазерного сканера, например в виде автомобильного лазерного радара. Как вариант, скорость транспортного средства 4 также может измеряться при помощи 2- или 3-мерного лазерного сканера, например, при помощи двух последовательных замеров через короткий промежуток времени для определения локального перемещения транспортного средства 4 за промежуток между подобными двумя замерами. Следовательно, один и тот же лазерный сканер, как вариант, может использоваться и в качестве датчика 7 измерения скорости, и в качестве датчика 9 измерения геометрии.
По альтернативному варианту осуществления скорость также может измеряться при помощи необязательного приемопередатчика 13 DSRC. Для этого, например, с целью определения относительной скорости vr во время сеансов связи DSRC могут осуществляться измерения на основе доплеровского сдвига частоты. Как вариант, скорость может измеряться при помощи приемопередатчика 13 с инфракрасным излучением во время сеанса связи с транспортным средством.
Также допустимо, чтобы устройство 15 DSRC OBU измеряло собственную скорость самостоятельно и отправляло эту информацию на приемопередатчик 13 DSRC во время сеанса связи 14 DSRC, что также охватывается используемым здесь определением, когда говорится, что приемопередатчик 13 DSRC используется в качестве датчика измерения скорости.
Если скорость измеряется при помощи приемопередатчика 13 DSRC, то предполагается, что первая и четвертая зоны 8 и 16 обнаружения совпадают.
Помимо этого, приемопередатчик 13 DSRC может использоваться в качестве датчика 9 измерения геометрии, если, будучи элементом радиосвязи 14 DSRC, он принимает данные по транспортному средству от устройства 15 DSRC OBU, при помощи которых он может рассчитать геометрию транспортного средства 4, например длину L. Например, устройство 15 DSRC OBU передает информацию, относящуюся к классу транспортного средства и числу осей на транспортном средстве 4, по которой, опять же с использованием таблицы с типовой геометрией транспортных средств для типового класса транспортных средств и количеством осей, можно рассчитать геометрию соответствующего транспортного средства. Если датчик 9 измерения геометрии и приемопередатчик 13 DSRC совмещены, то предполагается, что зоны 10, 16 обнаружения соответственно также совпадают.
Как вариант, приемопередатчик 13 DSRC может быть выполнен с возможностью использования специализированной связи малого радиуса действия, отличной от DSRC, например инфракрасной или любой микроволновой технологии.
Таким образом, изобретение не ограничено представленными вариантами осуществления и включает в себя все варианты и модификации, охватываемые прилагаемой формулой изобретения.
Адаптивное конкурентное окно в прерывистых каналах беспроводной связи
Способ и устройство для обнаружения вращающегося колеса
Способ и устройство детектирования колес
Способ дорожного сбора с транспортных средств в открытой системе платной дороги
Способ управления для системы взимания дорожных сборов
Способ управления для системы взимания дорожных сборов
Контролирующее транспортное средство для системы взимания платы за проезд
Устройства и способы управления для системы взимания дорожных сборов
Способ детектирования колеса транспортного средства
Способ детектирования колеса транспортного средства
Адаптивное конкурентное окно в прерывистых каналах беспроводной связи
Способ и устройство для обнаружения вращающегося колеса
Способ и устройство детектирования колес
Способ дорожного сбора с транспортных средств в открытой системе платной дороги
Способ управления для системы взимания дорожных сборов
Способ управления для системы взимания дорожных сборов
Контролирующее транспортное средство для системы взимания платы за проезд
Устройства и способы управления для системы взимания дорожных сборов
Способ детектирования колеса транспортного средства
Способ детектирования колеса транспортного средства

