Результат интеллектуальной деятельности: СПОСОБ И УСТРОЙСТВО ДЕТЕКТИРОВАНИЯ КОЛЕС
Вид РИД
Изобретение
Настоящее изобретение относится к способу и устройству для детектирования колес транспортного средства, которое передвигается по проезжей части дороги в направлении движения и колеса которого, по меньшей мере, частично открыты сбоку.
Детектирование колес транспортного средства представляет интерес для многочисленных прикладных задач. Таким образом, на основании распознавания состояния колес можно с определенностью заключить, что в данной области дорожное движение происходит надлежащим образом, например, для того чтобы контролировать границы или инициировать определенные действия, такие как включение аварийного сигнала, включение освещения, открытие шлагбаума, съемку изображения с целью контроля и т.д. Современные системы транспортных штрафов также часто основываются при расчетах штрафов на количестве осей транспортного средства, таким образом, обнаружение колес (колесных осей) также может быть важной основой для систем учета несчастных случае в результате дорожных происшествий или для систем оплаты парковки.
Детектирование колес движущегося транспортного средства основано на горизонтальной составляющей касательной скорости, которая отличается от скорости остальной части транспортного средства, и вызывает соответствующее доплеровское смещение частоты измерительного пучка радиолокационного устройства, известного из документа DE 10 2008 037233 A1. Для этой цели используется радиолокационный измерительный модуль скорости, который облучает нижнюю область проходящих транспортных средств с помощью главного лепестка диаграммы направленности пучка радиолокационного устройства, и из смеси возвращающейся частоты определяет единый измерительный сигнал скорости, который имеет максимальный сигнал в местах расположения колес. Автоматическое обнаружение такого максимума в кривой сигнала требует использования аналитического поиска экстремальных значений сигнала, который соответственно является тщательно разработанным. Кроме того, разрывы между тяговым транспортным средством и его прицепом могут ошибочно показывать максимум сигнала и промежуточный «фальшивый» максимум, который приводит к ошибочному детектированию колес.
Изобретение имеет своей целью создание способов и устройств для детектирования колес, которые могут позволить более гарантированное обнаружение, чем известные решения.
Эта цель достигается в первом аспекте изобретения с помощью способа, который включает:
излучение электромагнитного излучения лепестка диаграммы направленности измерительного пучка с известной временной характеристикой (характеристикой во времени) частоты из области сбоку от дороги на область, которая находится выше проезжей части дороги, и с наклоном по отношению к направлению движения,
прием излучения лепестка диаграммы направленности измерительного пучка, отраженного проходящим транспортным средством, и запись временной характеристики всех частот, появляющихся одновременно, как временной характеристики комбинации приемных частот, причем запись временной характеристики относительно указанной известной характеристики, и
обнаружение в качестве колеса уширения частоты, появляющегося в записанной временной характеристике комбинации приемных частот во время прохождения транспортного средства и которое превышает заданное пороговое значение.
Изобретение основано на новом подходе детектирования колес движущегося транспортного средства, основанного на горизонтальной составляющей касательной скорости, которая отличается от горизонтальной составляющей скорости остальных частей транспортного средства, и вызывает соответствующий доплеровский сдвиг частоты измерительного пучка лазерного локатора (лидара) или радара. Если используется измерительный пучок, который является расширяющимся по поперечному сечению пучка (имеется «лепесток диаграммы направленности измерительного пучка»), этот пучок распространяется в телесном угле в виде конической формы и попадает, по меньшей мере, частично на проходящее колесо с расширенной областью падения, например, в виде эллипса с высотой или шириной в диапазоне от 10 до 50 см. Точки на различной высоте вращающегося колеса имеют различные значения горизонтальной составляющей касательной скорости (при этом горизонтальная составляющая касательной скорости является постоянной вдоль ширины колеса для точек на одном уровня), и таким образом горизонтальная составляющая касательной скорости создает различный доплеровский сдвиг частоты для точек на разной высоте, что приводит к «фрагментации» или «уширению» частоты по отношению к передаваемому излучению лепестка диаграммы направленности измерительного пучка и к образованию множества частот в принимаемом измерительном пучке, вернувшемся от вращающегося колеса. Когда излучение лепестка диаграммы направленности измерительного пучка попадает на вращающееся колесо на область, протяженную по высоте, это приводит к уширению частоты в приемном излучении по высоте пучка, что может быть использовано для детектирования колеса.
На этот эффект накладывается второй паразитный эффект уширения частоты, происхождение которого может быть объяснено различными углами проекции горизонтальной составляющей касательной скорости на направление от приемника: это направление проекции изменяется в виде функции от наблюдаемой точки отражения в области падения пучка. Этот второй эффект уширения частоты не зависит от того, проходит ли мимо приемника корпус транспортного средства или вращающееся колесо, и определяется исключительно геометрическими параметрами измерительной схемы. Для детектирования колеса величина уширения частоты, вызванная доплеровским эффектом, должна превышать уширение частоты, связанное с геометрическими параметрами. В результате, способ детектирования колеса с высокой достоверностью обнаружения колеса достигается на основе «доплеровской характеристики», создаваемой колесом.
Заданное пороговое значение предпочтительно определяется заранее, исходя из уширения частоты, которое появляется во время прохождения части транспортного средства, без колеса. Таким образом, способ может быть откалиброван на месте с помощью сравнительных измерений.
Во втором аспекте изобретение направлено на создание устройства детектирования колес транспортного средства, которое передвигается по дороге в направлении движения, и колеса которого, по меньшей мере, частично открыты сбоку; устройство характеризуется тем, что содержит:
по меньшей мере один доплеровский лазерный локатор или доплеровское радиолокационное устройство, которое излучает электромагнитное излучение лепестка диаграммы направленности измерительного пучка с известной временной характеристикой частоты на целевой объект и записывает временную характеристику всех частот, имеющихся одновременно в излучении лепестка диаграммы направленности измерительного пучка, отраженном от целевого объекта, в качестве принимаемой частотной комбинации, причем временную характеристику всех частот записывают относительно указанной известной характеристики,
при этом лепесток диаграммы направленности измерительного пучка направлен сбоку от дороги на область, находящуюся выше дороги, и направлен под наклоном к направлению движения, и
блок оценки, который в качестве колеса обнаруживает уширение частоты, появляющееся в записанной временной характеристике принимаемой частотной комбинации во время прохождения транспортного средства, причем указанное уширение частоты превышает заданное пороговое значение.
Преимущества устройства, выполненного в соответствии с изобретением, приведены выше при обсуждении способа согласно изобретению.
Изобретение, если оно осуществляется с доплеровским радиолокационным устройством, особенно подходит для взаимодействия с радиомаяком уже существующей беспроводной дорожной инфраструктуры, например такой, как WLAN (беспроводная локальная сеть), WAVE (беспроводной доступ в оборудование транспортного средства), или DSRC (специализированная связь на коротких расстояниях). Особые преимущества имеет вариант осуществления изобретения, в котором доплеровское радиолокационное устройство представляет собой придорожный радиомаяк с WLAN, WAVE или DSRC.
Дополнительные признаки и преимущества способа и устройства следуют из приведенного ниже описания предпочтительного примерного варианта осуществления изобретения со ссылкой на сопроводительные чертежи, на которых:
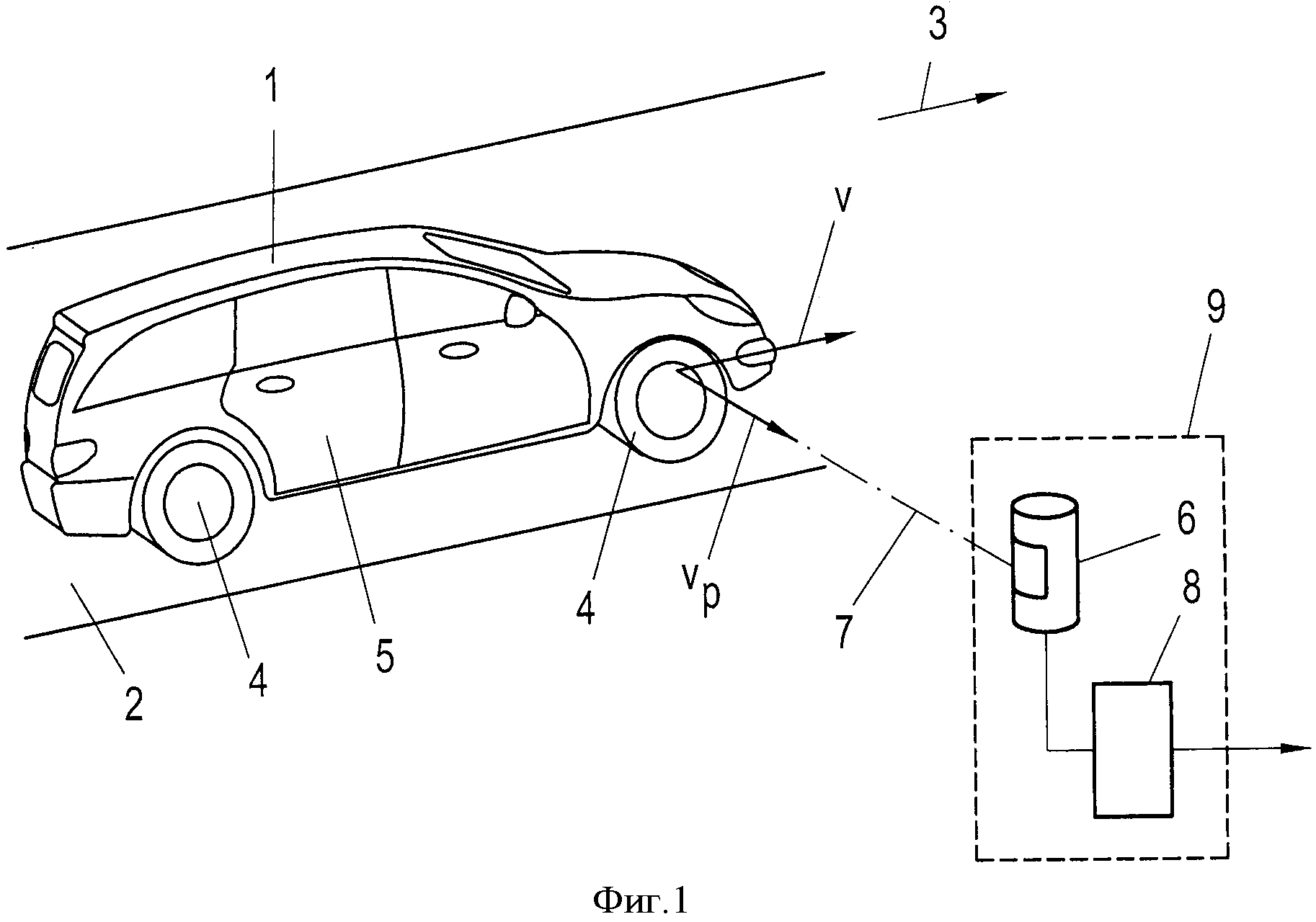
фиг.1 показывает первый вариант осуществления изобретения - устройства детектирования колес - в схематическом виде в перспективе для пояснения основных принципов изобретения;
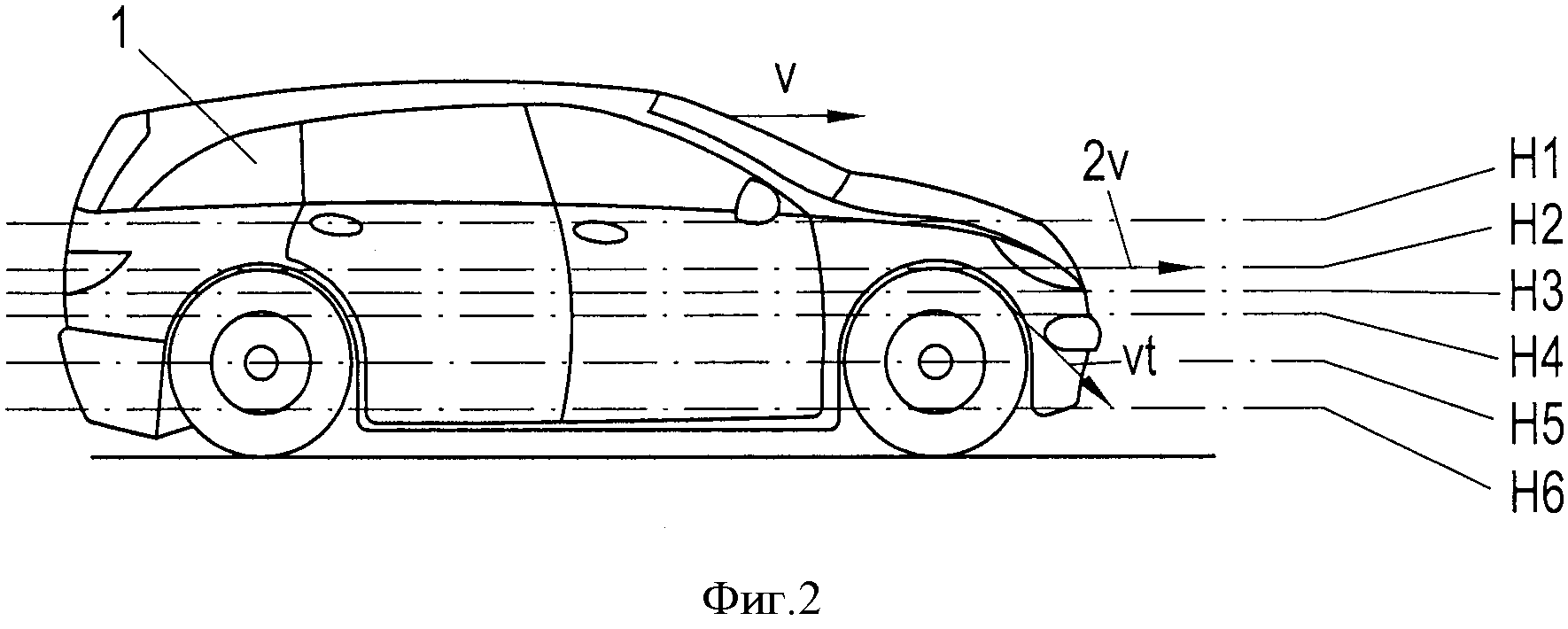
фиг.2 показывает несколько примерных линий сканирования измерительного пучка в устройстве, выполненном в соответствии с фиг.1, на проходящем транспортном средстве;
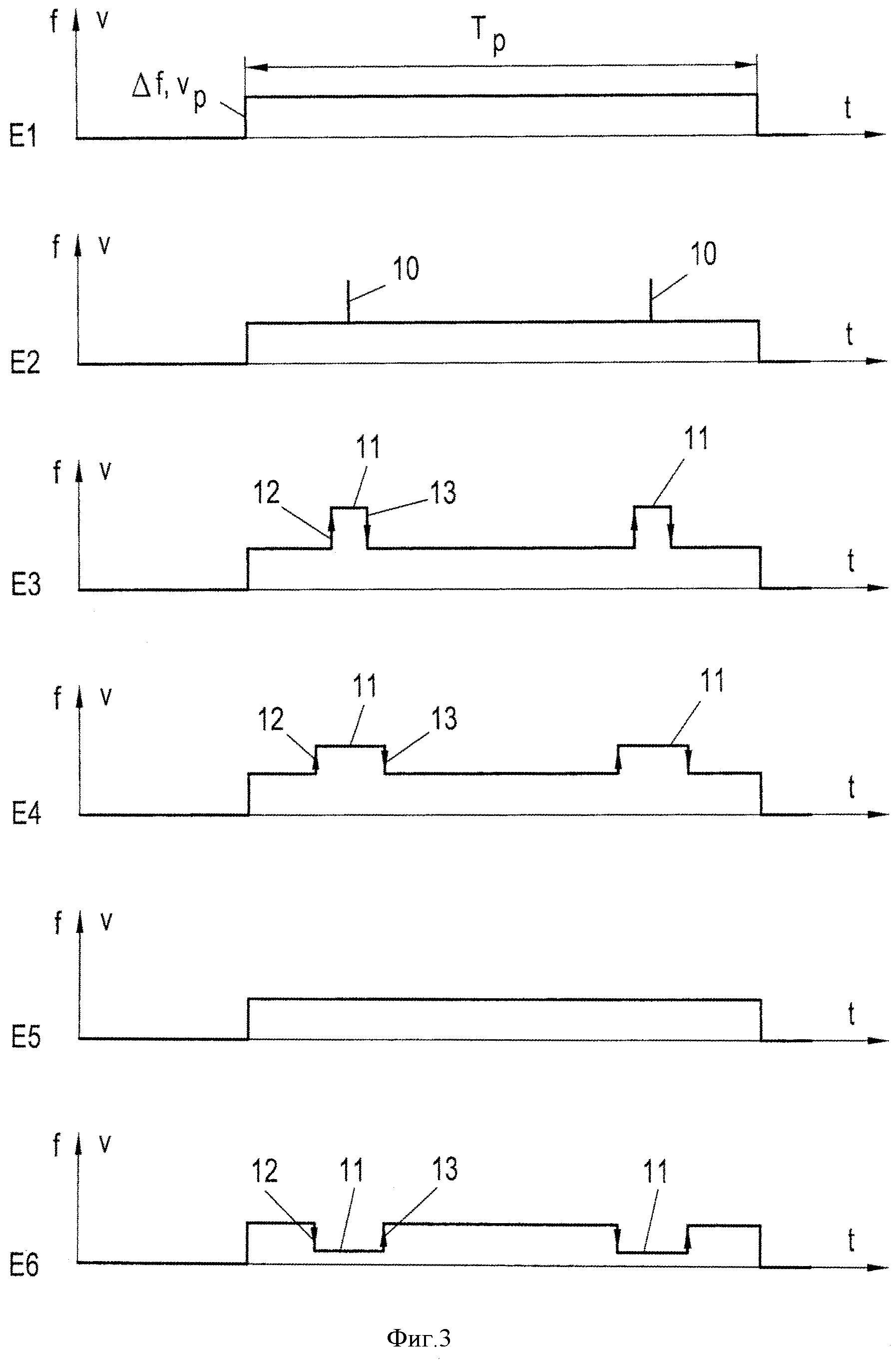
фиг.3 показывает временные диаграммы определенных характеристик приемной частоты или скорости для линий сканирования, показанных на фиг.2; и
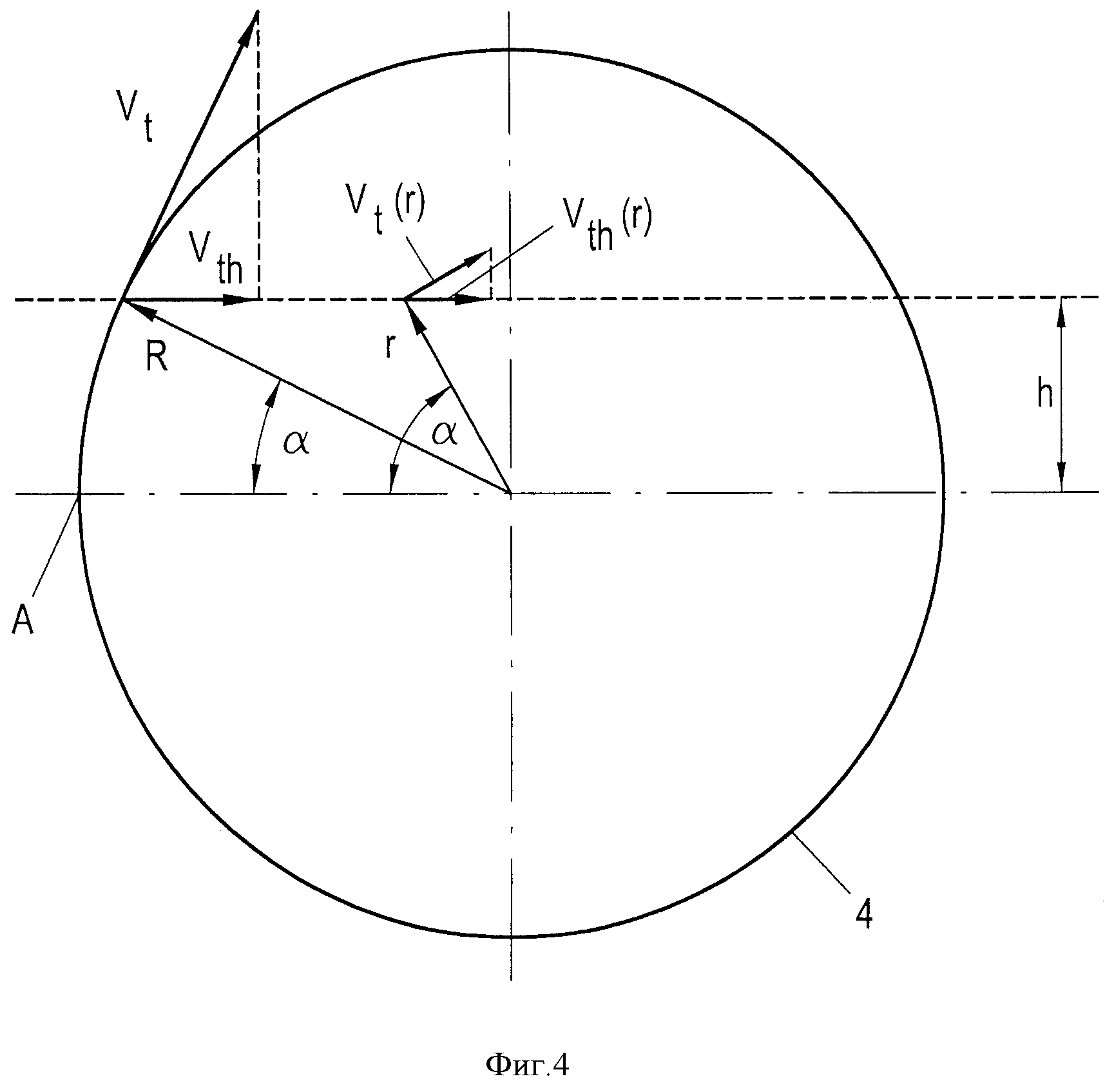
фиг.4 подробно показывает скорости на вращающемся колесе;
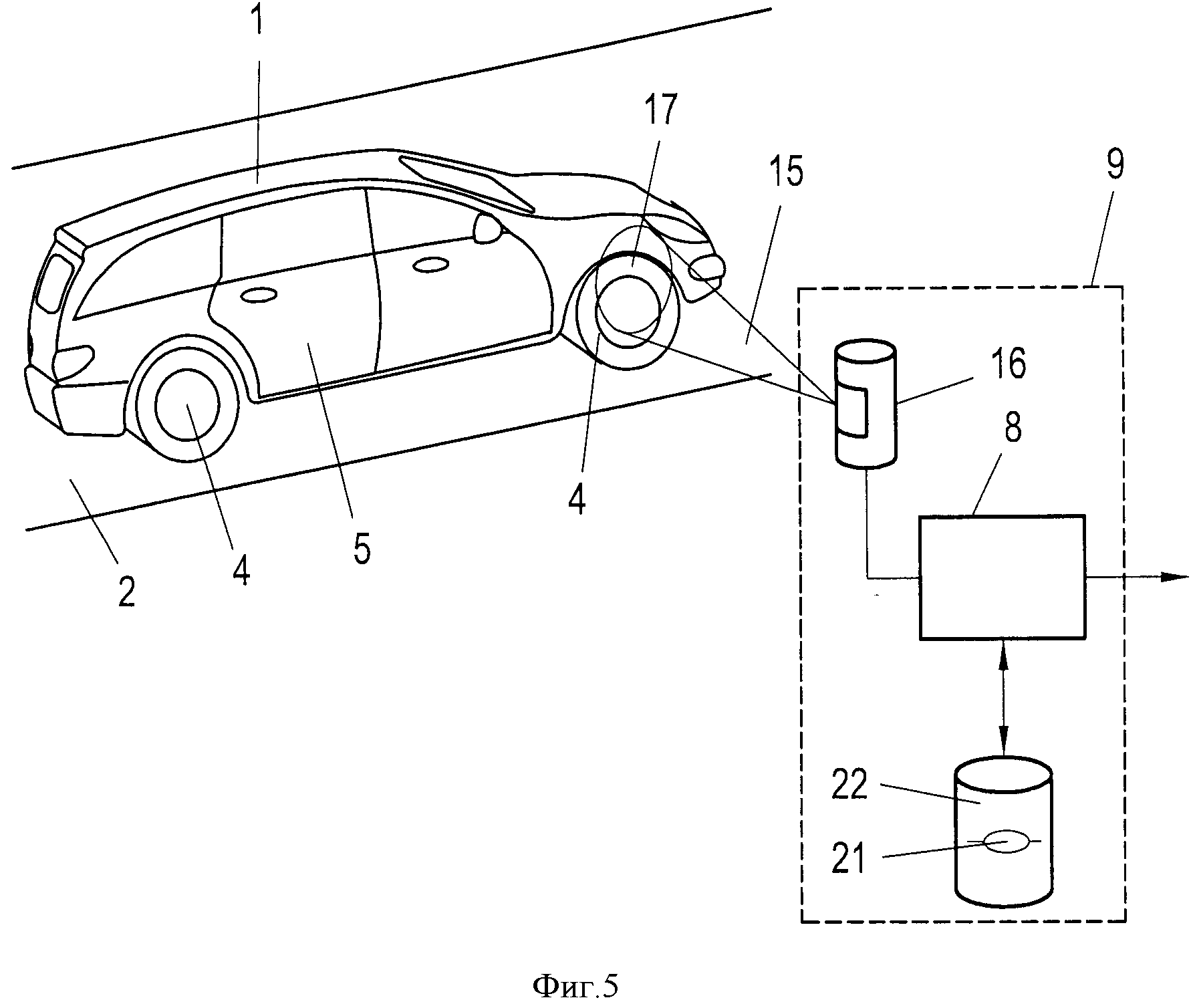
фиг.5 показывает вариант осуществления изобретения - устройства - в схематическом виде в перспективе;
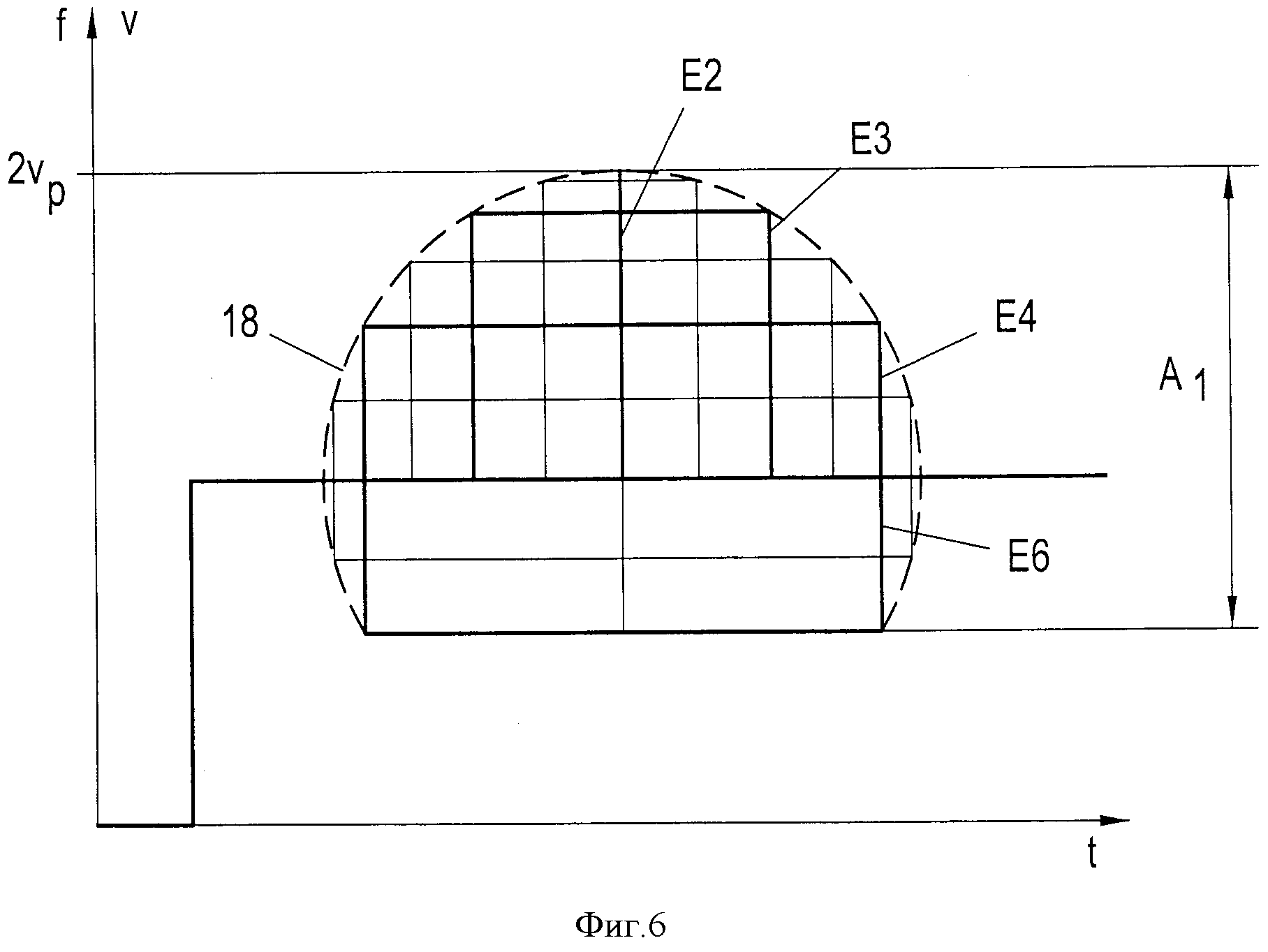
фиг.6 показывает совмещение нескольких характеристик приемной частоты или скорости из фиг.3, для того чтобы проиллюстрировать уширение частоты, вызванное доплеровским эффектом, при прохождении колеса;
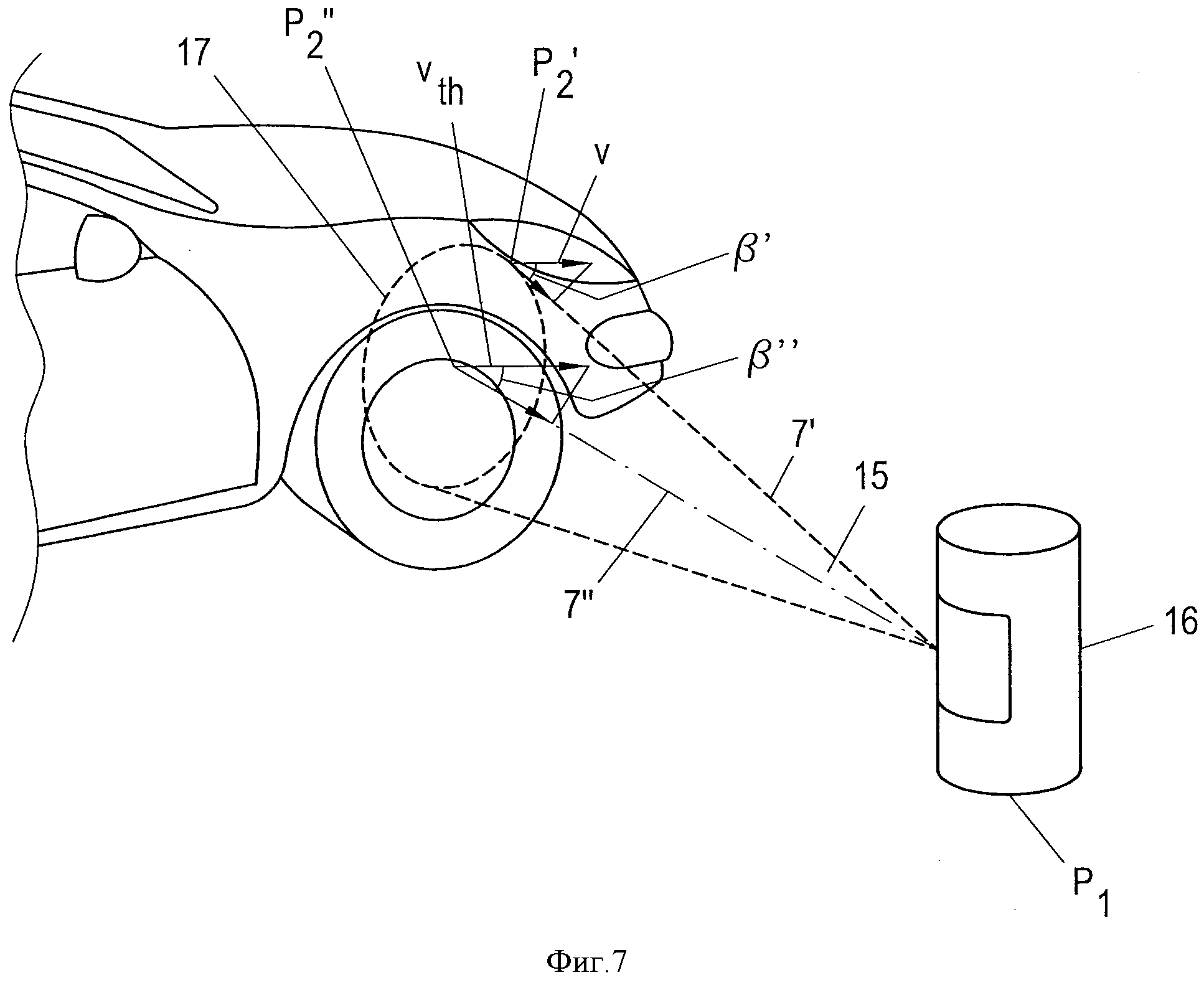
фиг.7 показывает геометрические соотношения в лепестке диаграммы направленности измерительного пучка для устройства из фиг.5, для того чтобы проиллюстрировать уширение частоты, вызванное геометрическими параметрами, при прохождении транспортного средства;
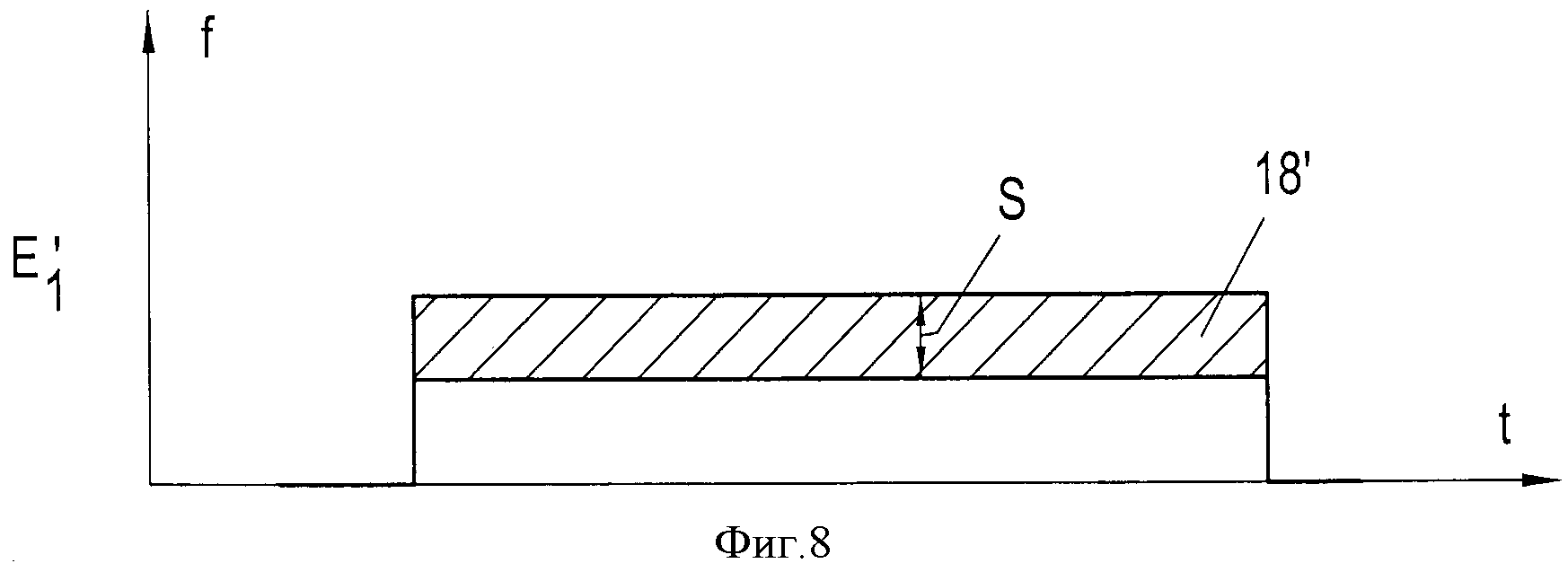
фиг.8 показывает влияние временной характеристики уширения частоты, вызванного геометрическими параметрами, во время прохода транспортного средства;
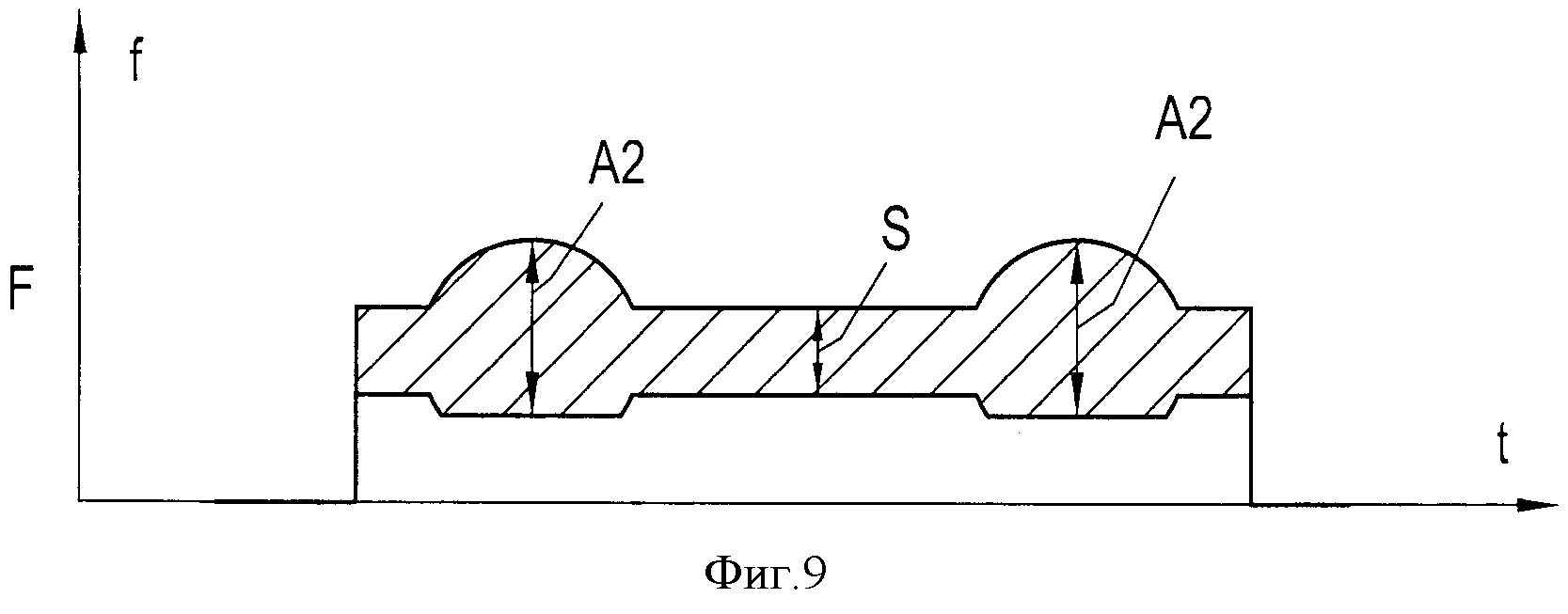
фиг.9 показывает комбинированный эффект от уширения частоты, вызванного геометрическими параметрами, согласно фиг.8, и уширения частоты, вызванного доплеровским эффектом, согласно фиг.6, на временной характеристике при проходе транспортного средства; и
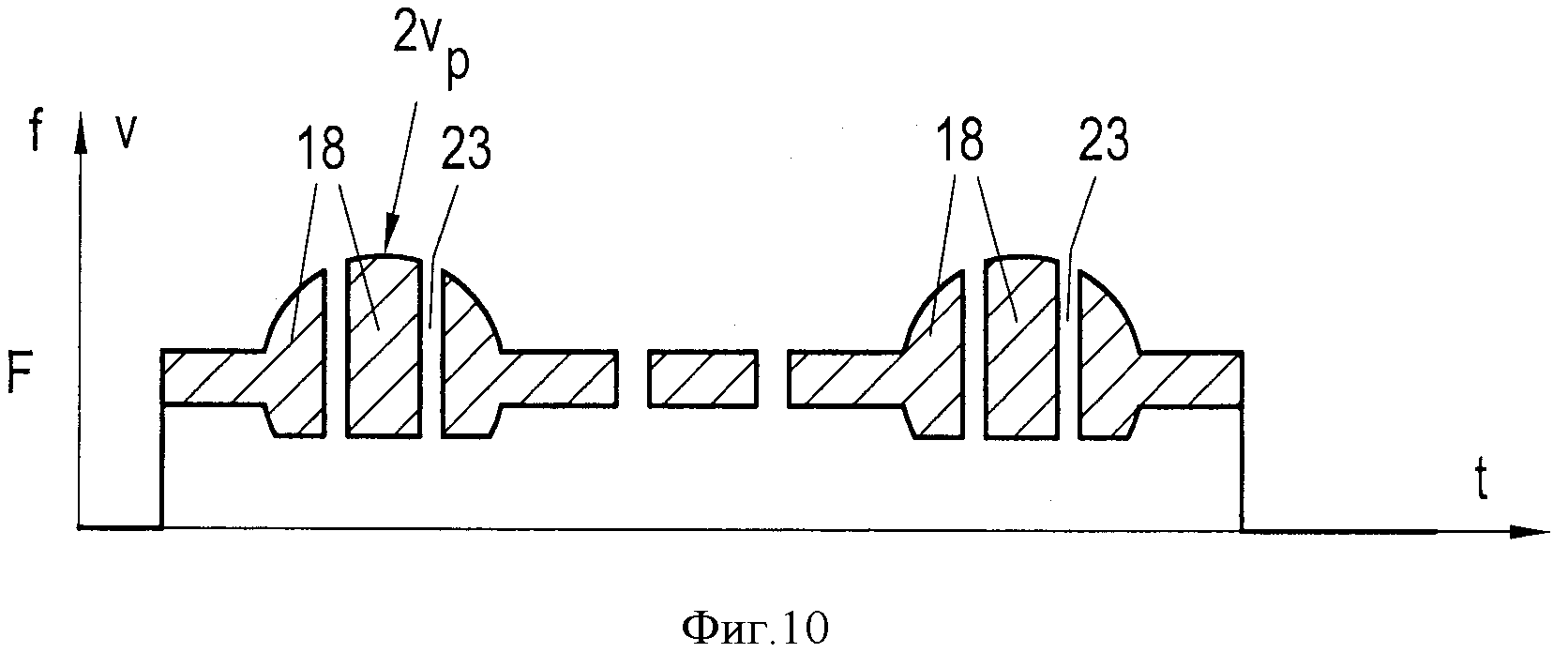
фиг.10 показывает вариант фиг.9.
На фиг.1 транспортное средство 1 перемещается на проезжей части 2 дороги в направлении 3 движения. Транспортное средство 1 имеет колеса 4, которые выступают вниз из корпуса 5 транспортного средства 1, и в то же самое время, по меньшей мере, частично открыты с боковых сторон корпуса, т.е. являются видимыми со стороны.
Доплеровский лазерный локатор или доплеровское радиолокационное устройство 6 излучает сфокусированный измерительный пучок 7 лидара или радиолокационного устройства сбоку от проезжей части 2 дороги с наклоном по отношению к направлению 3 движения и немного выше поверхности проезжей части дороги, так что измерительный пучок 7 попадает на проходящее транспортное средство 1 приблизительно в области его колес 4.
Доплеровский лидар или доплеровское радиолокационное устройство 6 оценивает с помощью метода, известного из уровня техники, приемную частоту измерительного пучка 7, отраженного транспортным средством 1 или его колесами 4, при этом (проекция) составляющая vp скорости v транспортного средства 1 в направлении измерительного пучка 7 или касательная скорость vt (фиг.2) колес 4 в точке падения измерительного пучка 7 могут быть определены исходя из смещения частоты, вызванного эффектом доплера, между излученным и отраженным измерительным пучком 7. Далее колеса 4 транспортного средства 1 могут быть обнаружены на основе этих данных, как будет показано более подробно в последующей части описания. Для этой цели блок 8 оценки, который выполняет соответствующие оценки приемной частоты измерительного пучка 7, располагается ниже по ходу процесса обработки относительно устройства 6. Таким образом, лидар/радиолокатор 6 и блок 8 оценки вместе образуют устройство 9 детектирования колес 4 транспортного средства 1.
Доплеровский лидар или доплеровское радиолокационное устройство 6 может быть устройством любого типа, известного в существующей области техники, использующего непрерывный, модулированный или импульсный измерительный пучок 7. Для непрерывного измерительного пучка 7 доплеровское смещение частоты между естественными частотами («несущими частотами») излученного и отраженного измерительного пучка 7 могут быть определены, например, с помощью интерференционных измерений. Для импульсного или модулированного измерительного пучка может быть измерено доплеровское смещение частоты между частотой следования импульсов или частотами модулирования излученного и отраженного измерительного пучка 7. Термин «приемная частота», используемый здесь, понимается таким образом, чтобы обозначать все такие естественные, несущие, импульсные или модулированные частоты измерительного пучка 7; т.е. термин «приемная частота» содержит любой тип частоты измерительного пучка 7, который подвергается влиянию доплеровского эффекта.
В принципе, природа самого измерительного пучка 7 также является произвольной, до тех пор, пока он является электромагнитной волной, является ли он видимым светом или инфракрасным светом, как в лидарном устройстве, или радиоволнами, в особенности микроволнами, как в радиолокационном устройстве.
Измерительный пучок 7 в показательном примере фиг.1 является в значительной степени сфокусированным, так что точка его падения на корпус 5 или колесо 4 имеет чрезвычайно маленький диаметр.
Фиг.2 показывает линии сканирования такого сфокусированного измерительного пучка 7, который попадает в транспортное средство 1 или его колеса 4, по существу, в точке, образующейся во время прохождения транспортного средства 1 мимо устройства 9. Для показательных целей шесть различных линий сканирования H1-H6 показаны с целью примера; однако должно быть понятно, что только единственная линия сканирования из H1-H6 от сфокусированного измерительного пучка 7 имеет место во время прохождения транспортного средства.
Фиг.3 показывает приемную частоту f отраженного измерительного пучка 7 во времени, для линий сканирования H1-H6, непрерывно принимаемых устройством 6 лидара/радиолокатора. Доплеровское смещение Δf приемной частоты f относительно частоты передачи пропорционально составляющей vp скорости соответственно сканируемых частей транспортного средства 1 или колеса 4. Поэтому частотные характеристики E1-E6, проиллюстрированные на фиг.3, являются тождественными характеристикам скорости.
Из характеристики E1 приемной частоты, показанной на фиг.3, очевидно, что линия сканирования H1, которая попадает на корпус 5 транспортного средства 1 снаружи колес 4, имеет по существу постоянное смещение Δf приемной частоты измерительного пучка 7, и, таким образом, составляющая vp скорости в течение временного интервала Тр прохождения корпуса выражается как волновой импульс R прямоугольной формы в характеристике приемной частоты.
Для линии сканирования H2, которая попадает на колеса 4 в самой верхней точке, где касательная скорость vt добавляется к скорости v транспортного средства, характеристика E2 приемной частоты имеет пик 10, составляющий 2vp и находящийся выше волнового импульса R прямоугольной формы, относящегося к корпусу, для каждого колеса 4.
Если измерительный пучок 7 попадает на колеса 4 на уровне между осью колеса и верхней частью колеса, как в линии сканирования H3 и H4, то происходит резкое изменение доплеровского сдвига в направлении измерения по отношению к импульсу R корпуса, и таким образом, происходит смещение приемной частоты или скорости, измеренной во время прохождения колеса 4, соответствующее проекции vp касательной скорости vt, как проиллюстрировано с помощью волновых импульсов 11 прямоугольной формы на характеристиках E3 и E4. Каждый импульс 11 содержит восходящий край 12 и последующий падающий край 13, т.е. две последовательно чередующиеся частотные неоднородности.
Характеристика E5 приемной частоты показывает особый случай, когда измерительный пучок 7 попадает на колеса 4 точно на уровне оси, где не существует касательной скорости колеса, которая могла бы проходить в направлении измерительного луча 7, по этой причине здесь колеса 4 не детектируются.
Линия H6 приемной частоты сканирует колеса 4 на уровне между нижней частью и осью, и характеристика E6 имеет сходство с характеристикой E4, но с изменениями 11-13 противоположного знака.
Фиг.4 аналитически показывает величину смещения 11 колеса 4, как функции высоты h соответствующей линии сканирования H1-H6 относительно оси А колеса, используя в качестве примера линию сканирования H4. Если R является радиусом колеса 4, а r - произвольным радиусом внутри колеса 4, тогда касательная скорость vt(r) для этого радиуса r пропорциональна этому радиусу r, а именно:

Горизонтальная составляющая vth(r) касательной скорости vt(r) в направлении 3 перемещения при угле α является синусной проекцией, соответствующей выражению:

При этом

Горизонтальная составляющая vth(r) касательной скорости, таким образом, имеет следующий вид:

Горизонтальная составляющая vth(r) касательной скорости, таким образом, прямо пропорциональна соответствующей рассматриваемой высоте h линии сканирования, при этом она является постоянной на высоте h во время сканирования колеса 4.
Фиг.5 показывает расширенный вариант способа в соответствии с фиг.1-4, в котором вместо сфокусированного измерительного луча 7 используется расширенный измерительный пучок, например рассеянный или растянутый в двух измерениях или в виде воронкообразной формы, определяемый ниже как «лепесток диаграммы направленности измерительного пучка», обозначенный позицией 15 для простоты. Лепесток 15 диаграммы направленности измерительного пучка может быть получен в лидаре с помощью находящейся на стороне выхода вогнутой линзы или в радиолокационном устройстве при отсутствии точной фокусировки. Например, фиг.5 показывает доплеровское радиолокационное устройство 16, которое вместе с блоком 8 оценки образует устройство 9.
В случае применения радиолокационного устройства лепесток 15 диаграммы направленности измерительного пучка характеризуется шириной лепестка приемной радиолокационной антенны, которая используется при измерении. Ширина лепестка приемной антенны (или ширина половинного значения) в направленной антенне определяется точками, в которых мощность уменьшается до половины (-3 dB) относительно максимума. Как известно специалистам в данной области техники, коэффициент усиления антенны в этом главном направлении излучения может быть рассчитан с помощью следующей формулы, если известна соответствующая ширина лепестка приемной антенны:
где
g = коэффициент усиления [dBi]
Δφ = ширина лепестка приемной антенны в горизонтальной плоскости (в градусах)
Δϑ = ширина лепестка приемной антенны в вертикальной плоскости (в градусах).
Ширина лепестка приемной антенны в радиолокационной антенне должна обеспечить хорошее разделение отдельных колес 4 в измерительном сигнале детектируемого транспортного средства 1. Таким образом, особенно благоприятно, если область 17 падения лепестка 15 диаграммы направленности измерительного пучка по существу имеет размер колеса 4 транспортного средства 1, и не только покрывает колесо 4, но также лежит до некоторой степени выше него, как показано на фиг.7. Оптимальная область 17 падения зависит от измерительного расстояния от транспортного средства 1, и поэтому выбор радиолокационной антенны зависит от геометрии общей компоновки. В общем антенны с коэффициентом усиления g более 10 dB являются особенно подходящими, в зависимости от компоновки и частоты радиолокационного устройства 16.
Направленные антенны обычно имеют коэффициент g усиления антенны больше 20 dB (соответствует ширине лепестка приемной антенны Δφ=Δϑ=приблизит. 16°). Таким образом, область 17, которая составляет 56 см в диаметре, может облучаться на расстоянии 2 м от транспортного средства 1 с коэффициентом усиления антенны 20 dB. Коэффициент g усиления антенны, составляющий 30 dB, может быть необходим для более удаленных транспортных средств 1, для того чтобы получить ширину лепестка приемной антенны Δφ=Δϑ=приблизит. 5°, которая охватывает область 17 облучения приблизительно 90 см на расстоянии 10 м.
При использовании такого лепестка 15 диаграммы направленности измерительного пучка, который попадает на довольно большую область 17 транспортного средства 1 или колес 4, соответствующие принимаемые частоты, т.е. E1-E6, из различных точек падения на область 17 (см. примерные линии сканирования H1-H6 на фиг.2) накладываются на композицию 18 различных принимаемых частот или скоростей; см. фиг.6. Другими словами, когда принимаемая частота f попадает в колесо 4, она фрагментируется или уширяется в комбинации 18 принимаемых частот или скоростей, вызванной эффектом доплера, во время Тр прохождения транспортного средства 1. Величина уширения частоты обозначается как A1 на фиг.6. Таким образом, присутствие такого уширения 18 частоты может быть использовано в качестве характеристики колеса 4.
Уширение 18 частоты, вызванное эффектом доплера, с величиной A1 является наложенным паразитным эффектом вторичного уширения частоты, который связан с геометрическими параметрами самого лепестка 15 диаграммы направленности измерительного пучка. Со своего местоположения P1 радиолокатор/лидар 16 осуществляет наблюдение, как это видно на фиг.7, различных точек P2', P2” в области 17 падения лепестка 15 диаграммы направленности измерительного пучка из различных направлений 7', 7”, в каждом случае они вместе с горизонтальной составляющей vt, касательной скорости у(колеса 4 или скорости v корпуса 5 транспортного средства 1 составляют соответственно различный телесный угол β1, β2. Проекция скорости v или vth на соответствующее направление 7', 7” лепестка 15 диаграммы направленности измерительного пучка, таким образом, приводит, от края до края области 17, к фрагментации или уширению 18' принимаемых частот, связанному с геометрическими параметрами, как показано на фиг.8, для скорости v корпуса 5 транспортного средства на уровне H1, как вызванное геометрическими параметрами уширение характеристики E1' принимаемой частоты, при этом оно принимает размер S.
Уширение 18 частоты, вызванное эффектом доплера, с величиной A1 (фиг.6) является результатом наложения уширения 18', вызванного геометрическими параметрами, с величиной S (фиг.8) в «действительной» комбинации F принимаемых частот временной характеристики, как проиллюстрировано на фиг.9. Уширение частоты проявляется в величине A2, которая состоит из величины A1, определяемой эффектом доплера, и уширения S, связанного с геометрическими параметрами, и измеряется в местах расположения колес 4.
Уширение 18', вызванное геометрическими параметрами, по существу зависит только от расположения установки и ориентации радиолокатора/лидара 6 по отношению к проезжей части 2 дороги или положения движущегося транспортного средства 1 и поэтому может быть определено с помощью исходных измерений для транспортного средства 1 (при закрытых колесах или когда лепесток 18 диаграммы направленности измерительного пучка попадает только на корпус 5). Величина S уширения 18', вызванного геометрическими параметрами, может в этом случае использоваться как контрольное или заданное значение для действительного процесса радиолокационного детектирования, в котором оценивается характеристика принимаемой частоты фиг.9, и обнаруживается колесо 4, если записанная характеристика F принимаемых частот показывает уширение A2, которое превышает величину S уширения, определенную в качестве контрольной.
Величина S уширения могла бы альтернативно определяться каждый раз заново для текущего процесса детектирования во время прохождения транспортного средства 1 при сохранении в памяти уширения 18' частоты, появляющегося в первые миллисекунды прохождения транспортного средства, когда корпус 5 транспортного средства входит в лепесток 18 диаграммы направленности измерительного пучка, это измерение может использоваться как пороговое значение для последующего детектирования колеса.
Как можно заключить из фиг.4, а также из уравнения (4), огибающая кривая уширения 18 частоты, вызванного эффектом доплера, примерно соответствует круговому контуру колеса 4, наблюдаемому под углами β', β”, т.е. в целом имеет форму эллипса, который может быть урезан, если область 17 не покрывает целиком колесо 4 (см. фиг.6). Если дополнительно принимается во внимание уширение 18', вызванное геометрическими параметрами, то огибающая кривая становится более размытой и приближенной к величине S уширения, но эта приближенная форма все еще может быть проанализирована, например, при сохранении в памяти композиции F принимаемых частот эталонного прохождения для контрольного колеса в качестве «эталонной характеристики» 21, например в памяти 22 устройства 9, чтобы в дальнейшем сравнивать ее с характеристикой F принимаемых частот при действительном прохождении транспортного средства.
Фиг.10 показывает реальный случай, когда в лепестке 15 диаграммы направленности отраженного измерительного пучка появляются прерывания 23, и таким образом, они также появляются в сигнале характеристики F принимаемой частоты во время прохождения Тр транспортного средства 1. Для сравнения эталонной характеристики 21 с такой действительной характеристикой F принимаемых частот могут выполняться соответствующие сравнения контура, площади поверхности и/или другой формы, которые позволяют получить высокую достоверность распознавания в таких случаях.
В предпочтительной практической реализации варианта осуществления изобретения из фиг.5 доплеровское радиолокационное устройство 16 в составе устройства 9 сконструировано с использованием существующей беспроводной дорожной инфраструктуры, например такой, как WAVE (беспроводной доступ в оборудование транспортного средства) или радиомаяки системы DSRC (специализированная связь на коротких расстояниях), или радиомаяки WLAN (беспроводная локальная сеть) придорожной инфраструктуры сети Интернет. Таким образом, уже существующие передающие компоненты систем WLAN, WAVE, или радиомаяки DSRC могут быть использованы как передающие компоненты доплеровского радиолокационного устройства 16. Приемные секции радиомаяков аналогичным образом могут быть использованы как приемные компоненты доплеровского радиолокационного устройства 16 или могут быть, по меньшей мере, интегрированы в приемные компоненты радиомаяков. Устройство и способ изобретения могут быть применены в этом случае, например, как программное приложение, работающее с традиционными радиомаяками с WLAN, WAVE или DSRC.
До сих пор предполагалось, что частота передачи лидара/радиолокатора 6 или лепестка 15 диаграммы направленности измерительного пучка является постоянной; т.е. ее характеристика во времени (временная характеристика) является постоянной характеристикой. Также возможно, однако, что устройство 6 могло бы излучать лепесток 15 диаграммы направленности измерительного пучка с непостоянной во времени частотой передачи, например, как в способах со скачкообразной перестройкой частоты, в которых частота постоянно изменяется в соответствии с заданным или известным принципом. Записанные характеристики F приемной частоты являются записанными по отношению к заранее известной временной характеристики частоты передачи для лепестка 15 диаграммы направленности измерительного пучка - являются ли они постоянными или переменными, т.е. справочными или стандартизованными, таким образом, влияние известной характеристики частоты передачи может быть компенсировано.
Соответственно изобретение не ограничивается проиллюстрированными вариантами осуществления изобретения, а включает все варианты и модификации, которые попадают в объем прилагаемых пунктов формулы изобретения.
Адаптивное конкурентное окно в прерывистых каналах беспроводной связи
Мобильные устройства и способы контроля транспортных средств
Способ и устройство для обнаружения вращающегося колеса
Способ дорожного сбора с транспортных средств в открытой системе платной дороги
Способ управления для системы взимания дорожных сборов
Способ управления для системы взимания дорожных сборов
Контролирующее транспортное средство для системы взимания платы за проезд
Устройства и способы управления для системы взимания дорожных сборов
Способ детектирования колеса транспортного средства
Способ детектирования колеса транспортного средства
Адаптивное конкурентное окно в прерывистых каналах беспроводной связи
Мобильные устройства и способы контроля транспортных средств
Способ и устройство для обнаружения вращающегося колеса
Способ дорожного сбора с транспортных средств в открытой системе платной дороги
Способ управления для системы взимания дорожных сборов
Способ управления для системы взимания дорожных сборов
Контролирующее транспортное средство для системы взимания платы за проезд
Устройства и способы управления для системы взимания дорожных сборов
Способ детектирования колеса транспортного средства
Способ детектирования колеса транспортного средства

