Результат интеллектуальной деятельности: Способ определения пространственных координат объектов и система для его реализации
Вид РИД
Изобретение
Настоящая группа изобретений относится к измерительной технике, предназначена для вычисления пространственных координат объектов и их частей и может быть использована для позиционирования крупногабаритных объектов, например, внутри цеховых помещений.
Известны способ и система (Position measurement system and method using cone math calibration, US 6535282 B2, 18.03.2003). Известное техническое решение представляет собой устройство, реализующее способ для измерения пространственных координат объектов, и применяется как универсальное позиционирующее устройство внутри помещений. Данное устройство содержит не менее двух базовых сканирующих устройств, которые непрерывно сканируют рабочее пространство двумя раскрытыми лазерными лучами, угол между которыми равен 90 градусов. Приемное устройство включает в себя два световых датчика, которые регистрируют время прохождения каждого луча. Световые датчики также детектируют импульс синхронизации (стробирующий сигнал) от каждого передатчика, который излучается один раз за оборот. Разные передатчики вращаются на различных скоростях и, следовательно, время детектирования лучей различно. Три пересекающиеся плоскости однозначно определяют точку в трехмерном пространстве, путем обнаружения трех веерообразных лучей от передатчиков. По данным регистрируемых временных задержек, вычислительное устройство датчика определяет угол места и азимут. На основе полученных данных определяются координаты датчиков методом триангуляции.
Известные способ и система обладают рядом недостатков, а именно:
- высокие требования, предъявляемые к соосности базовых устройств, обусловленные триангуляционным методом измерения координат;
- высокие требования, предъявляемые к точности установки лазерных излучателей в корпусе базового устройства, обусловленной методом измерения координат;
- необходимость регулировки угловой скорости подвижных частей базовых устройств, обусловленная методом измерения координат;
- сложная конструкция и трудоемкий процесс сборки устройства, обусловленные наличием большого числа движущихся компонентов и предъявляемых требований к их монтажу.
Задачей настоящей группы изобретений является создание нового способа определения пространственных координат объектов и системы для его реализации с достижением следующего технического результата: упрощение конструкции измерительной системы и уменьшение требований, предъявляемых к деталям и сборочным единицам при изготовлении и монтаже при сохранении точностных характеристик, а также упрощение обработки полученных данных.
Поставленная задача в части способа решена за счет того, что способ определения пространственных координат объектов заключается в том, что располагают излучатели в точках пространства с известными координатами, располагают по меньшей мере один датчик на контролируемом объекте на расстоянии от излучателей, не превышающем предельную дистанцию его измерения, направляют на каждый излучатель и каждый датчик стартовый синхронизирующий импульс, одновременно на каждом датчике и на каждом излучателе начинают генерацию двоичного сигнала с заданной для каждого датчика и излучателя фазой, последовательно облучают пространство каждым излучателем, регистрируют на каждом датчике сигналы от каждого излучателя, сравнивают по фазе полученные от каждого излучателя сигналы и сигналы, сгенерированные на каждом датчике, с помощью встроенных таймеров, которые производят отсечки временных интервалов при смене значения бита. Разность фаз определяется разностью показаний таймеров для одинаковых участков сигнала. По полученной разности фаз определяют расстояние от каждого датчика до каждого излучателя, затем методом трилатерации определяют трехмерные координаты каждого датчика относительно заранее принятой точки отсчета.
Поставленная задача в части системы решена за счет того, что система для определения пространственных координат объектов включает по меньшей мере четыре излучателя, расположенных в точках пространства с заданными координатами, по меньшей мере один датчик, расположенный на контролируемом объекте на расстоянии от излучателей, не превышающем предельную дистанцию его измерения, устройство синхронизации, связанное с каждым излучателем и с каждым датчиком, при этом каждый излучатель содержит блок управления, включающий центральное процессорное устройство и таймер, блок формирования сигнала, включающий устройство управления, множество источников излучения и связанных с ними оптических систем, причем источники излучения, каждый датчик содержит блок регистрации сигнала, включающий приемник оптического излучения, преобразователь сигнала, активный фильтр и демодулятор, устройство синхронизации содержит центральное процессорное устройство и устройство вывода информации.
Таким образом, заявленные совокупности существенных признаков позволяют упростить конструкцию за счет уменьшения количества деталей и сборочных единиц, а также снижения требования к их монтажу за счет применения нового способа измерения пространственных координат из-за отказа от использования подвижных частей в базовых устройствах. Одновременно с этим уменьшается погрешность измерения пространственных координат за счет введения дополнительных математических корректировок. Требования соосности и установки источников лазерного излучения, предъявляемые к прототипу, исключаются, так как излучатели осуществляют облучение пространства в стационарном режиме и не предполагают наличия подвижных частей, двигателей и других элементов, для которых необходим контроль угловой скорости. Необходимо также отметить, что при триангуляции (iGPS) вычисляют только углы места и азимуты поворотом вращающейся головки со скрещенными лазерными лучами, это может существенно снизить точность из-за погрешностей излучателей, необходимо осуществление сложных корректировок. В заявляемых способе и системе, даже при наличии некоторой постоянной погрешности часов излучателей и датчиков, появляется возможность определить однозначно область сходимости и реализовать очень точную корректировку простым методом. При этом случайные погрешности исключаются увеличением количества измерений. Таким образом, упрощается процесс вычислений и обработки данных.
Сущность заявляемой группы изобретений и возможность ее практической реализации поясняется приведенным ниже описанием и иллюстрациями.
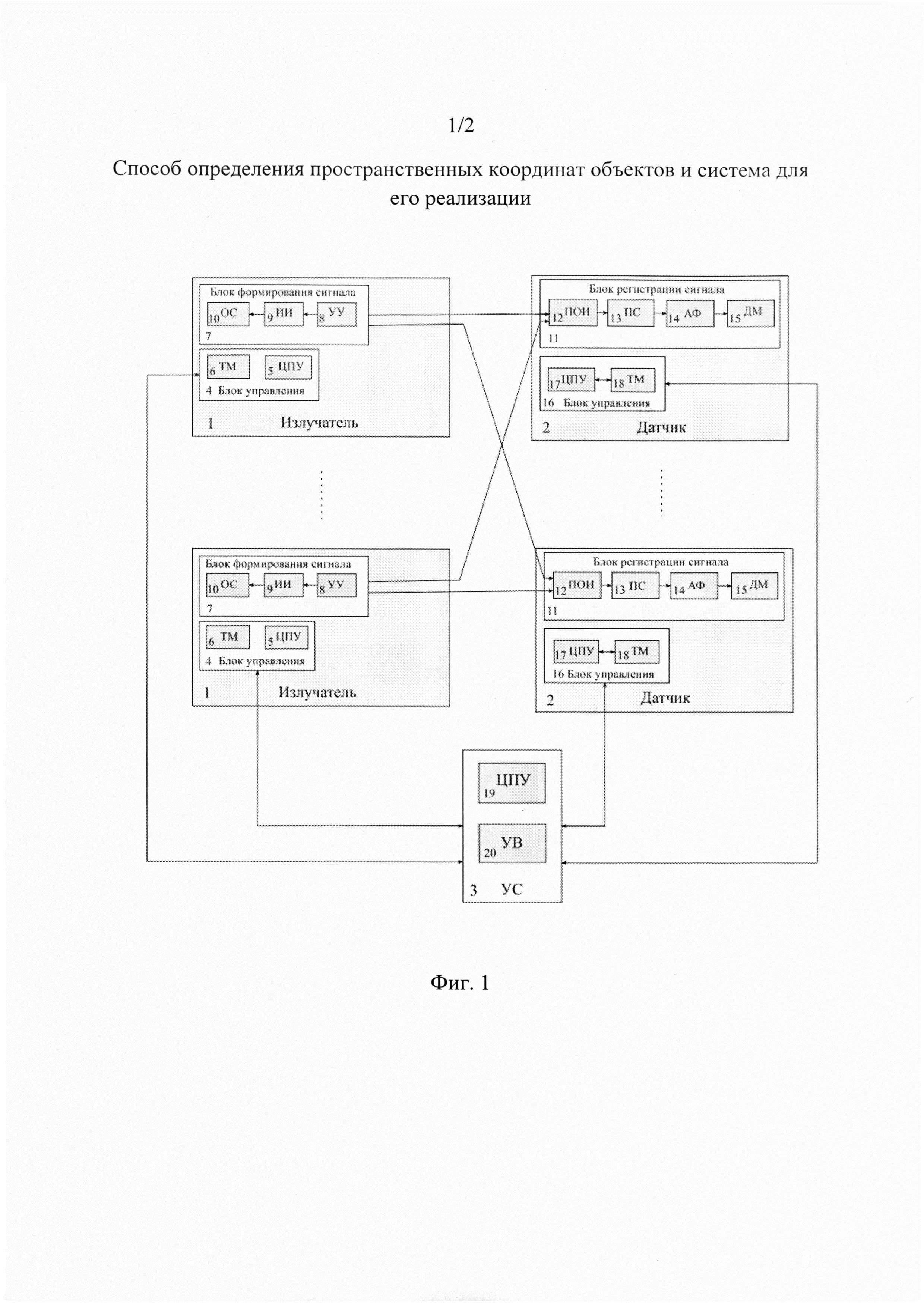
На фиг. 1 представлена структурная схема системы.
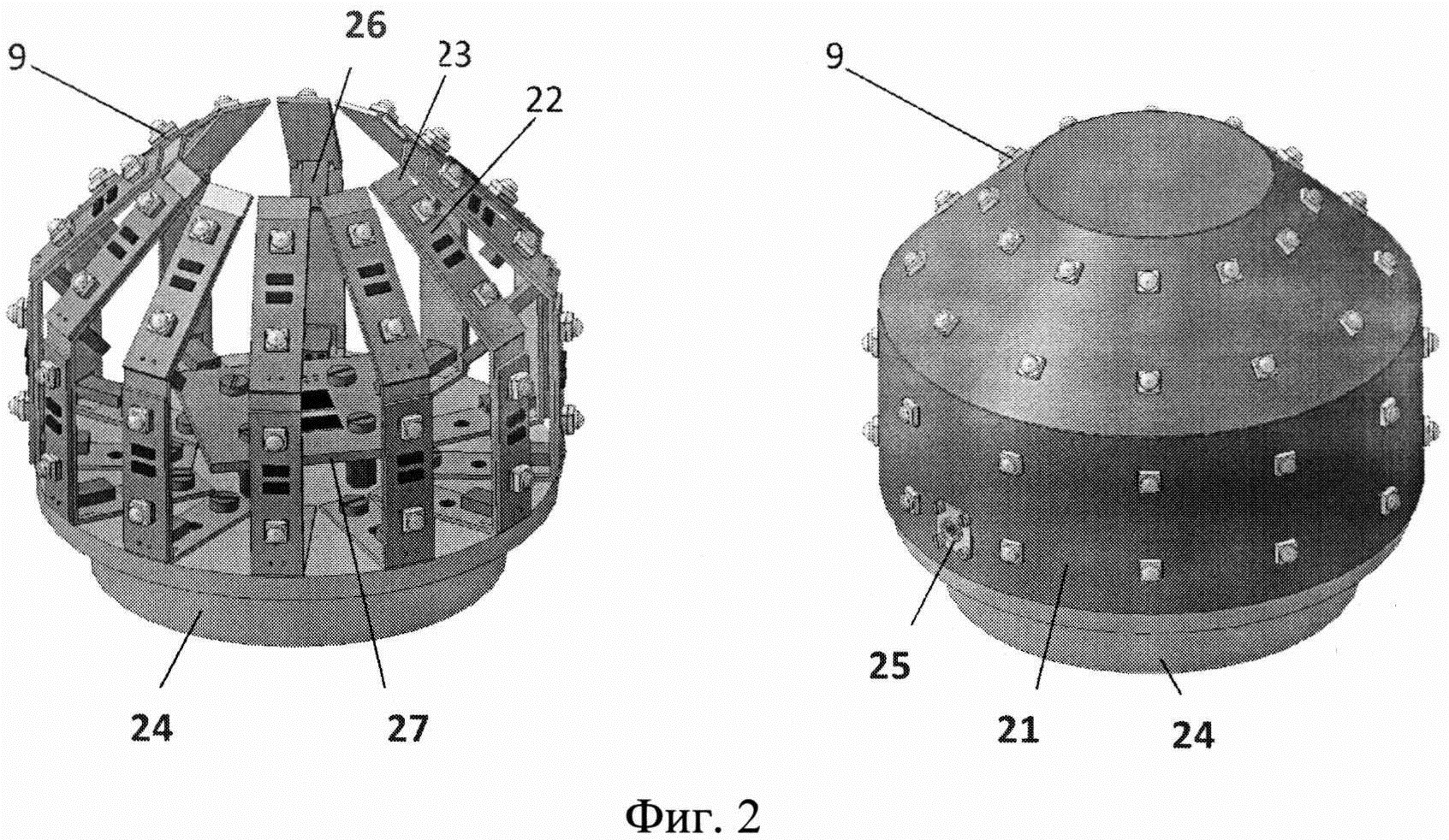
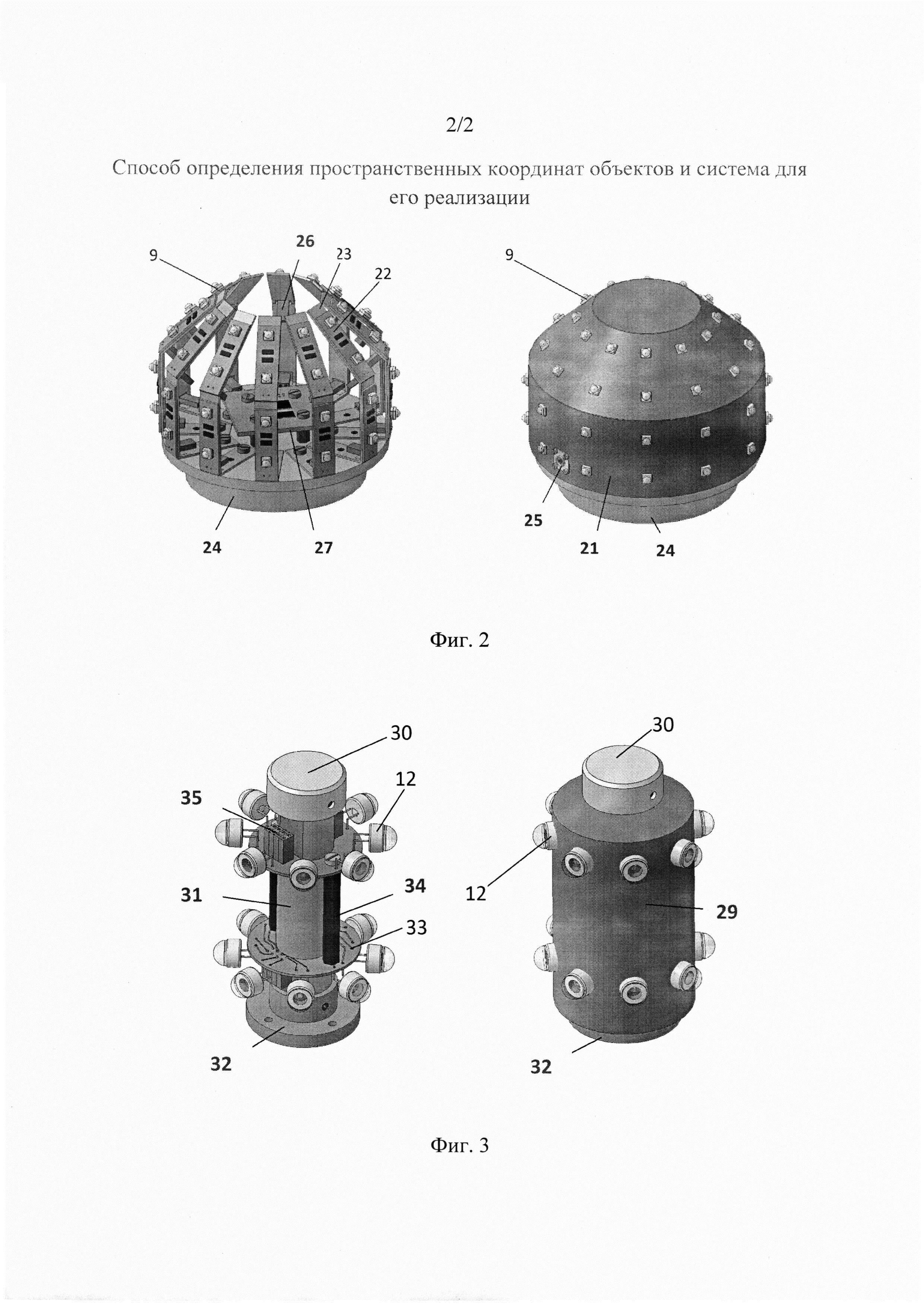
На фиг. 2 представлен внешний вид излучателя без корпуса и с корпусом.
На фиг. 3 представлен внешний вид датчика без корпуса и с корпусом.
Система (Фиг. 1) для определения пространственных координат объектов включает по меньшей мере четыре излучателя 1, расположенных в точках пространства с заданными координатами, по меньшей мере один датчик 2, расположенный на контролируемом объекте (на чертеже не показано) на расстоянии от излучателей 1, не превышающем предельную дистанцию его измерения, устройство 3 синхронизации (УС), связанное с каждым излучателем 1 и с каждым датчиком 2.
Каждый излучатель 1 содержит блок 4 управления, включающий центральное процессорное устройство 5 (ЦПУ) и таймер 6 (ТМ), блок 7 формирования сигнала, включающий устройство 8 управления (УУ), множество источников 9 излучения (ИИ) и связанных с ними оптических систем 10 (ОС).
Каждый датчик 2 содержит блок 11 регистрации сигнала, включающий приемник 12 оптического излучения (ПОИ), преобразователь 13 сигнала (ПС), активный фильтр 14 (АФ) и демодулятор 15 (ДМ), блок управления 16, включающий центральное процессорное устройство 17 (ЦПУ) и таймер 18 (ТМ).
Устройство 3 синхронизации содержит центральное процессорное устройство 19 (ЦПУ) и устройство 20 вывода информации (УВ).
Излучатель 1 (Фиг. 2) включает корпус 21, внутри которого установлены источники 9 оптического излучения, закрепленные на платах 22. Платы 22 соединены с планками 23, например, с помощью клея. Планки 23 закреплены на платформе 24 с помощью винтов (на чертеже не показано). Разъем 25 прикреплен к корпусу 21 с помощью винтов (на чертеже не показано). Подключение источников 9 оптического излучения осуществляется с помощью гнезд 26. Плата 27 с электронными компонентами устанавливается внутри корпуса 21. Соединение излучателя 1 с устройством 3 синхронизации осуществляется через разъем 28.
Датчик 2 (Фиг. 3) в рабочем состоянии располагается внутри защитного корпуса 29. Крышка 30 соединена с трубкой 31 стопорным винтом (на чертеже не показано). Трубка 31 крепится к основанию 32 стопорным винтом (на чертеже не показано). Платы 33 крепятся к трубке 31 с помощью двух стоек 34 и винтов (на чертеже не показано). Приемники 12 оптического излучения крепятся к плате 33 с помощью пайки. Соединение приемников 12 с микроконтроллером (на чертеже не показано) осуществляется с помощью гнезд 35, закрепленных на плате 33 с помощью пайки. Основание 32 имеет возможность крепления на произвольную поверхность, например, с помощью винтов (на чертеже не показано).
Описанная система реализует следующий способ определения пространственных координат объектов.
Излучатели 1 располагают в точках пространства с заданными координатами. По меньшей мере один датчик 2 располагают на контролируемом объекте (на чертеже не показано) на расстоянии от излучателей 1, не превышающем предельную дистанцию его измерения. На каждый излучатель 1 и каждый датчик 2 направляют стартовый синхронизирующий импульс от устройства 3 синхронизации. Одновременно на каждом датчике 2 и на каждом излучателе 1 начинают генерацию двоичного сигнала с заданной для каждого датчика 2 и излучателя 1 фазой.
Последовательно облучают пространство каждым излучателем 1 и регистрируют на каждом датчике 2 сигналы от каждого излучателя 1. Затем сравнивают по фазе полученные от каждого излучателя 1 сигналы и сигналы, сгенерированные на каждом датчике 2. По полученной разности фаз определяют расстояние R от каждого датчика 2 до каждого излучателя 1.
Далее методом трилатерации определяют трехмерные координаты каждого датчика 2 относительно заранее принятой точки отсчета следующим образом.
Обозначим буквами А, В, С, D излучатели 1, осуществляющие измерения расстояний до датчика 2 S. Соответственно, положение датчика 2 S определяется точкой пересечения четырех сфер, центры которых - координаты А, В, С, D.
Исходя из утверждения, что точка, имеющая координаты датчика 2 (xS, yS, zS) является точкой пересечения четырех сфер, радиусы которых равны расстояниям Ri от излучателей 1 до датчика 2, то получаем следующую систему уравнений:
Здесь RА - это расстояние до излучателя 1, координаты которого принимаются как (0, 0, 0).
В результате решения указанной системы уравнений определяется координаты датчика 2 (xS, yS, zS), а соответственно координаты контролируемого объекта в известной системе координат.
Способ получения сахаристых продуктов из ржаного сырья
Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления
Способ регистрации изображения с повышенным разрешением
Хроматографический способ разделения компонентов смеси в растворе
Способ определения бактерицидных свойств веществ
Способ формирования массива волоконных решеток брэгга с различными длинами волн отражения
Устройство для ручной кладки кирпича
Способ посола деликатесных рыб
Композиция пищевой добавки для производства мясных продуктов
Способ маркировки поверхности контролируемыми периодическими структурами
Устройство для разделения жидкостей по плотности
Способ частотно-импульсной модуляции полупроводникового лазерного источника оптического излучения для опроса оптических интерферометрических датчиков
Оптико-электронная система для контроля пространственного положения железнодорожного пути
Выправочно-подбивочно-рихтовочная машина для выправки и контроля железнодорожного пути и оптико-электронная система выправочно-подбивочно-рихтовочной машины
Оптико-электронная система для контроля пространственного положения железнодорожного пути
Способ цветовой классификации объектов и оптико-электронное устройство для его реализации
Способ измерения линейного смещения объекта и устройство для его осуществления
Устройство для контроля поворота объекта
Устройство для ручной кладки кирпича
Установка для смешивания и диспергирования различных компонентов в жидких средах

