Результат интеллектуальной деятельности: Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления
Вид РИД
Изобретение
Изобретение относится к экспериментальной гидромеханике, измерительной технике, к измерению физических величин, лабораторным установкам, судостроению, робототехнике и может быть использовано для определения компонентов тензоров присоединенных моментов инерции тел в виде корпусов моделей судов, плавучих средств и сооружений на этапах проектирования, а также для уточнения параметров математических моделей судна.
Известен способ определения присоединенного момента инерции самоходного плавсредства (авторское свидетельство СССР №1064176, МКП G01M 10/00, дата приоритета 04.01.1983, дата публикации 30.12.1983) заключающийся в нахождении разности между моментом инерции плавсредства в жидкости и его собственным моментом инерции, где момент инерции плавсредства в жидкости определяют как отношение момента тяги движителей относительно центра масс плавсредства к угловому ускорению, для чего измеряют тягу движителей при переложенных на борт рулевых устройствах, удерживая плавсредство связью от продольных перемещений с одновременным изменением положения точки закрепления связи для исключения боковых перемещений, а также измеряют плечо тяги движителей относительно центра масс, после чего производят освобождение плавсредства от связи и измеряют его угловое ускорение. Недостатком данного способа является невысокая точность, связанная с тем, что для сообщения плавсредству вращательного движения используются собственные движители, искажающие результат измерения при определении присоединенных моментов инерции на выбеге, поскольку возмущают жидкость, а также затруднительно применить способ для измерения присоединенного момента инерции, кроме как по углу рыскания.
Известен способ для определения тензора инерции тела (патент РФ №2436055, МКП G01M 1/10, дата приоритета 04.05.2009, дата публикации 10.12.2011) заключающийся в том, что тело размещают во внутренней рамке двухосного двухрамочного карданова подвеса, имеющего цилиндрическую форму, горизонтальную подвижную собственную ось вращения, и внешнюю рамку с вертикальной осью прецессии, сообщают ему управляемым электродвигателем и упругим закручиваемым элементом реверсивно-симметричное двухосное сферическое движение, состоящее из непрограммного сферического замедленного вращения по углам прецессии и собственного вращения, синхронных и прямопропорциональных между собой и обратного ускоренного, симметричного по отношению к замедленному программному движению в обратном направлении по программе, построенной по текущим замерам тормозного движения. На таком реверсивном симметричном сферическом движении, измеряют расходы электроэнергии на десяти интервалах угла собственного поворота. По двадцати значениям расходов энергии с вычетом тепловых омических расходов в обмотках вычисляют пять осевых моментов инерции относительно пяти положений в теле мгновенной оси вращения. Шестой осевой момент инерции определяют отдельно на вращательном движении тела вокруг вертикальной оси прецессии при отключенном собственном вращении с замерами расхода энергии. Недостатком данного способа является то, что он не позволяет раздельно определять тензор собственных моментов инерции вместе с тензором присоединенных моментов инерции погруженного в жидкость тела.
Известен способ для определения тензора инерции тела (патент РФ №2575184, МКП G01M 1/10, дата приоритета 30.10.2014, дата публикации 20.02.2016), заключающийся в том, хронометрическим методом измеряют угловое ускорение тела и одновременно активный крутящий момент - по углу закручивания торсионного вала. По известным крутящим моментам и соответствующим угловым ускорениям определяют шесть осевых центральных моментов инерции. Техническим результатом изобретения является возможность определения тензора инерции тел, к которым неприменима модель твердого тела. Недостатком способа является невысокая точность при применении способа для тела в жидкости, поскольку способ не учитывает диссипацию энергии в виде гидродинамического момента и возможного трения в конструктивных элементах устройства.
Известно устройство для определения присоединенных масс, моментов инерции и демпфирования моделей судов методами их свободных колебаний в жидкости (патент РФ №2425343, МКП G01M 1/16, дата приоритета 10.12.2009, дата публикации 27.07.2011), в котором методом свободных колебаний в продольных и поперечных плоскостях на воздухе определяют положение центра масс и собственные моменты инерции относительно вертикальной, горизонтальной и поперечной осей модели, подвешенной на бифилярном подвесе, с возможностью изменения длины подвеса и расстояния между бифилярами, находящейся в гидролотке и уравновешенной по ватерлинию, снабженной дополнительным грузом с обеспечением сохранения осадки, с произведенной статической тарировкой модели в воде, с определением коэффициентов ее условной остойчивости, с отклонением модели и записью ее свободных затухающих колебаний. Присоединенные моменты инерции вычисляют по суммарным моментам инерции и демпфирования модели за вычетом соответственных значения, полученных при испытании модели в воздухе. Недостатками данного устройства являются то, что необходимо точно тарировать модель, сложно получить присоединенные моменты инерции при больших углах начального отклонения, при большом демпфировании свободные колебания могут быстро затухать, а также на устройстве сложно точно определить присоединенные центробежные моменты инерции из-за дополнительного неучтенного раскачивания модели судна.
Известно устройство для определения присоединенных масс (полезная модель РФ №128327, МКП G01M 1/16, дата приоритета 09.01.2013, дата публикации 20.05.2013), в котором в цилиндрическом корпусе с отверстиями подвода и отвода жидкости закреплена модель исследуемого тела на оси с опорами, и аппаратура для регистрации колебаний модели в виде датчика колебаний, имеется приспособление в виде двух вибраторов для приведения модели в колебательное движение, ось выполнена в виде упругого стержня, а модель исследуемого тела выполнена в виде цилиндра, концентрично с зазором 50-500. Недостатками данного устройства являются то, что с его помощью не получить тензор присоединенных моментов инерции, поскольку колебания происходят вдоль продольной и поперечной оси исследуемого тела, что позволяет определить только соответствующие присоединенные массы.
Известно устройство для определения тензора инерции тела (патент РФ №2436055, МКП G01M 1/10, дата приоритета 04.05.2009, дата публикации 10.12.2011), содержащее двухосный карданов подвес, имеющий внешнюю рамку с валом и внутреннюю рамку-платформу с валом с возможностью размещения в ней тела, автоматизированного электропривода в виде электродвигателя и зубчатого передаточного механизма с переключающими муфтами, внутренняя рамка выполнена в виде полого осесимметричного цилиндра, электродвигатель содержит упругий элемент в виде закручиваемого торсиона, составляющего с ним гибридный двигатель, а передаточный зубчатый механизм состоит из конического колеса, сцепленного с цилиндром, соосного с внутренним валом, и неподвижного конического колеса, соосного с внешней рамкой с возможностью отключения его электромуфтами посредством продольного перемещения с одновременным отключением вращения внутренней рамки. Недостатком устройства является то, что оно не позволяет производить измерение тензора присоединенных моментов инерции для тела, помещенного в жидкость.
Наиболее близким к изобретению способом и устройством является способ идентификации присоединенного момента инерции тела и устройство для его осуществления (патент РФ №2627023, МКП G01M 1/16, дата приоритета 13.10.2016, дата публикации 02.08.2017). Способ заключается в том, что тело в виде корпуса судна погружают в опытовый бассейн по ватерлинию или с заданной осадкой и сообщают одно или несколько реверсивно-симметричных вращений моментом упругих сил вокруг вертикальной оси тела, отсчитываемых от произвольно выбранного углового положения, содержащих этап свободного замедленного замеряемого вращения и этап управляемого обратного симметричного вращения с сообщением крутящего момента сил в соответствующих угловых положениях, замеряют работу крутящего момента сил на обратном вращении на ограниченном угловом интервале через потребляемую электроэнергию с учетом обнуления разности работ гидродинамического момента, с учетом расхода энергии на магнитные, электрические и механические потери, с учетом момента инерции тела, с использованием двух рубежных значений модулей вектора угловой скорости определяют присоединенный момент инерции тела. Устройство содержит автоматизированный электропривод с упругим элементом в виде закручиваемого торсиона со скользящей заделкой, при этом тело в виде корпуса судна закреплено через его центр масс с жестким стержнем с рамкой в опытовом бассейне, при этом упругий элемент в виде упругого стержня состоит из двух частей, одна из частей закреплена на рамке и на опоре, а вторая на жестком стержне и на дне опытового бассейна, при этом на жестком стержне закреплен электропривод и рамка, с которой сцеплен вал датчика угол-код, закрепленного на опоре, а электропривод выполнен в виде электродвигателя с энкодером и осесимметричным массивным маховиком, расположенным на валу двигателя соосно с вертикальной осью вращения корпуса судна. Недостатком данного способа и устройства является то, что он направлен на определение только присоединенного момента инерции тела - по углу рыскания.
Решается задача расширения функциональных возможностей способа идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления.
Сущность изобретения заключается в том, что для идентификации присоединенных моментов инерции тело в виде корпуса судна, закреплено в подшипниках опорным вертикальным полым валом с опорой опытового бассейна с жидкостью и погружено по ватерлинию, или с заданной осадкой. На теле в центре масс установлено измерительное устройство в виде электропривода с маховиком таким образом, что ось вращения маховика параллельна оси тела, относительно которой производится идентификация. Для идентификации осевого присоединенного момента инерции по углу рыскания внутри полого вала установлено упругое закручиваемое устройство, при помощи скользящей заделки и с телом. Для идентификации присоединенных моментов инерции по углу крена или дифферента тело закреплено с опорным валом двумя вращательными кинематическими парами. Вращательные кинематические пары являются частью трехосевого карданного подвеса с варьируемым числом степеней свободы. Тело выставляют на заданное начальное угловое положение и сообщают ему программное неравномерное вращательное движение, отсчитываемое от произвольно выбранного углового положения, содержащее этап замедленного программного либо непрограммного замеряемого вращения на ограниченном угловом интервале и после паузы этап ускоренного симметричного первому этапу управляемого электродвигателем с маховиком вращения с начальным угловым положением, совпадающим с углом остановки тела на первом этапе. В случае непрограммного первого этапа, который совершается после начального разгонного движения, траектория движения тела для второго этапа строится по замерам угла поворота при таком замедленном движении. В случае гармонического программного движения рассматриваемые этапы движений не разделяются паузой. На выбранных симметричных движениях по замерам силы тока электродвигателя определяется затраченная энергия на совершение работы электродвигателя, и в зависимости от определяемого осевого присоединенного момента инерции определяется работа активных моментов упругого устройства либо работа восстанавливающих моментов судна. В предположении совпадения работ гидродинамического момента и момента трения в опорах устройства на симметричных интервалах движения, с учетом электрических и магнитных потерь, трения в электродвигателе оцененные по известному коэффициенту либо более подробно на предварительной идентификации математической модели электропривода или с использованием известных аналитических выражений, с учетом тензора инерции тела с неподвижными частями электроприводов на воздухе, тензора инерции маховика с ротором электродвигателя, с использованием измерений рубежных значений угловой скорости маховика и тела, с использованием рубежных значений положений тела, при равенстве по модулю угловой скорости на двух этапах движений на выбранных интервалах, с использованием разности уравнений сохранения механической энергии для двух интервалов симметричных движений определяют осевые присоединенные моменты инерции тела. В случае существенной несимметрии корпуса судна относительно диаметральной плоскости для расчетов выбирается пара симметричных однонаправленных движений. На основе определенных осевых присоединенных моментов инерции тела на заданной частоте и амплитуде идентификация центробежных присоединенных моментов инерции симметричного относительно диаметральной плоскости тела заключается в том, что на теле в виде корпуса судна вблизи центра масс взаимоперпендикулярно устанавливаются измерительное устройство в виде трех электродвигателей с маховиками. Тело выставляется на начальное угловое положение, совпадающее с угловыми положениями при эксперименте по определению осевых присоединенных моментов инерций. Телу сообщают неравномерные вращательные симметричные сферические движения вокруг двух заданных осей, содержащие этапы вращений на ограниченных угловых интервалах, совпадающих с режимами движений при определении осевых присоединенных моментов инерции, управляемых двумя электродвигателями с маховиками. Третий электродвигатель используется для компенсации углового движения относительно третьей оси вращения. На таких симметричных сферических интервалах движений замеряют затраченные энергии на совершение работ электродвигателей, определяют работу восстанавливающих моментов и моментов упругого устройства. С учетом совпадений работ гидродинамических моментов и моментов трения устройства на симметричных интервалах сферических движений, с учетом электрических и магнитных потерь, трения в электродвигателе, с учетом тензора инерции тела с неподвижными частями электроприводов на воздухе, тензора моментов инерций маховиков с ротором электродвигателей, с использованием измерений рубежных значений угловых скоростей маховиков и тела, с использованием рубежных значений положений тела, при равенстве по модулю на двух этапах на выбранных интервалах пары угловых скоростей сферического движения с использованием разницы уравнений сохранения механической энергии для двух интервалов симметричных сферических движений определяют центробежные присоединенные моменты инерции тела.
Сущность заключается в том, что в устройстве тело в виде корпуса судна закреплено в опытовом бассейне, посредством полого вертикального вала с подшипниковыми опорами, ось которого проходит через центр масс трехосевого карданного подвеса. Внутри тела закреплено измерительное устройство в виде трех безредукторных маломощных электродвигателей с датчиками скоростей ротора и осесимметричных маховиков, которые установлены на валах электродвигателей, и их оси вращения параллельны осям тела. Тело дополнительно закреплено с одним концом упругого закручиваемого устройства в виде торсиона. Торсион проходит внутри полого вала вдоль его оси и закреплен другим концом на опоре бассейна. Датчики угловых положений измеряют углы поворота карданного подвеса. При проведении идентификации по углу рыскания углы поворота рамок карданного подвеса вокруг продольной и поперечной оси тела стопорятся. При проведении идентификации по углу крена или дифферента тела рамки карданного подвеса свободны только для вращения вокруг продольной либо поперечной оси и представляют собой вращательные кинематические пары, датчики угловых положений установлены таким образом, что измеряют углы крена или дифферента тела в точках сочленения кинематических пар. При проведении идентификации центробежного момента инерции рамки карданного подвеса свободны для вращения по трем осям. Для предотвращения деформации торсиона при скручивании устройство снабжено компенсирующим устройством, установленным в опоре бассейна.
В методе предполагается, что присоединенные моменты инерции зависимы от частоты и амплитуды колебаний и одинаковы при разгоне и торможении корпуса судна при одинаковом по модулю ускорении. Перед началом эксперимента известными методами на воздухе идентифицируется тензор инерции и положение центра масс корпуса судна с установленными электродвигателями с маховиками. Проводится идентификация математической модели электропривода с определением коэффициентов электрической и механической части, а также математической модели момента трения в подшипниках электродвигателя и других потерь мощности, в основном, в виде электрических и магнитных потерь. Магнитные потери не берутся в расчет при использовании электродвигателя с полым ротором. Для снижения габаритных размеров маховика при идентификации крупных моделей судов он может быть выполнен с изменяемым радиусом инерции, а также возможна установка на валу электродвигателя пакетных конструкций из нескольких маховиков. Также проводятся опыты по идентификации поперечной h и продольной Н метацентрической высоты судна, весового водоизмещения судна Ds и коэффициента жесткости торсиона при кручении с. Обозначим  - угловая скорость корпуса судна по углу крена (
- угловая скорость корпуса судна по углу крена ( по углу дифферента,
по углу дифферента,  - по углу рыскания); Ωх - угловая скорость маховика в опыте идентификации по углу крена (Ωy - по углу дифферента, Ωz - по углу рыскания); Jxx - суммарный осевой момент инерции корпуса судна с неподвижными частями электродвигателей и подвижными частями крепежной конструкцией относительно оси х (Jyy - относительно оси y, Jzz - относительно оси z, Jxz и Jzx - центробежные моменты инерции) составляющий тензор
- по углу рыскания); Ωх - угловая скорость маховика в опыте идентификации по углу крена (Ωy - по углу дифферента, Ωz - по углу рыскания); Jxx - суммарный осевой момент инерции корпуса судна с неподвижными частями электродвигателей и подвижными частями крепежной конструкцией относительно оси х (Jyy - относительно оси y, Jzz - относительно оси z, Jxz и Jzx - центробежные моменты инерции) составляющий тензор  J и Jt - осевой и поперечный момент инерции осесимметричного маховика с подвижными частями электродвигателя (ротором) составляющие тензор маховика
J и Jt - осевой и поперечный момент инерции осесимметричного маховика с подвижными частями электродвигателя (ротором) составляющие тензор маховика  λ44 - присоединенный момент инерции жидкости по углу крена (λ55 - по углу дифферента, λ66 - по углу рыскания, λ46 и λ64 - по углам рыскания и крена); μ44 - коэффициент демпфирования судна углу крена (μ55 - по углу дифферента, μ66 - по углу рыскания, μ46 и μ64 - по совместному движению по углам рыскания и крена).
λ44 - присоединенный момент инерции жидкости по углу крена (λ55 - по углу дифферента, λ66 - по углу рыскания, λ46 и λ64 - по углам рыскания и крена); μ44 - коэффициент демпфирования судна углу крена (μ55 - по углу дифферента, μ66 - по углу рыскания, μ46 и μ64 - по совместному движению по углам рыскания и крена).
Идентификация присоединенного момента инерции тела в виде корпуса судна по углу крена или дифферента осуществляется следующим образом. Корпус судна, который может быть несимметричен относительно диаметральной плоскости xOz (Фиг.), закреплен в опытовом бассейне с полым вертикальным валом через вращательные кинематические пары, позволяющие вращаться судну вокруг его центра масс по углу крена θ (либо по дифференту φ). Для предотвращения поворота вокруг вертикальной оси, вал застопорен с подшипниками. Ось электродвигателя с маховиком расположена соосно с осью вращения судна по углу крена θ (дифферента φ). Рассматривается плоское вращательное движение корпуса судна в плоскости Oyz вокруг горизонтальной оси х, проходящей через центр масс (Oxz вокруг горизонтальной оси у, проходящей через центр масс).
К механической системе приложена пара сил, характеризуемая восстанавливающим моментом Мhφ (Mhθ); крутящим моментом электродвигателя Меφ (Меθ), приложен гидродинамический диссипативный момент Мdφ (Mdθ), который будем считать приведенным к углу φ (θ) и обобщенный диссипативный момент трения Мƒφ (Мƒθ) во вращательных кинематических парах и в электродвигателе Меƒφ (Меƒθ). Маломощный электродвигатель выполняет лишь корректирующую функцию со сравнительно малым потреблением электроэнергии и, соответственно, с весьма малыми потерями энергии в электродвигателе.
Эксперименты проводятся в несколько этапов. Для идентификации осевых коэффициентов два двигателя могут быть убраны из устройства с пересчетом тензора инерции Jb и метацентрических высот. Рассмотрим случай программного первого этапа и программного второго этапа. На первом этапе после предварительного выставления судна на начальное угловое положение на некоторый угол  осуществляется первоначальное свободное разгонное движение судна. Первоначальное разгонное движение может быть необходимо в случае использования адаптивной подстройки коэффициентов регулятора в системе управления вращательными движениями. Данное движение переходит в программное замедленное вращение судна, корректируемое управляемым маховиком, по углу поворота судна и рассматривается угловой интервал φ∈[φ1 φ2] (θ∈[θ1 θ2]) на интервале времени t∈[t1 t2], на котором определяются узловые значения угловой скорости судна. Замедленное вращение может происходить не программно в опыте по идентификации присоединенного момента инерции на собственной частоте колебаний. В этом случае на замедленном движении на основе замеренного угла поворота корпуса судна при помощи интерполяции определяется кинематическое уравнение вращения вида φ(t)=ƒ1(t) (θ(t)=ƒ1(t), в котором
осуществляется первоначальное свободное разгонное движение судна. Первоначальное разгонное движение может быть необходимо в случае использования адаптивной подстройки коэффициентов регулятора в системе управления вращательными движениями. Данное движение переходит в программное замедленное вращение судна, корректируемое управляемым маховиком, по углу поворота судна и рассматривается угловой интервал φ∈[φ1 φ2] (θ∈[θ1 θ2]) на интервале времени t∈[t1 t2], на котором определяются узловые значения угловой скорости судна. Замедленное вращение может происходить не программно в опыте по идентификации присоединенного момента инерции на собственной частоте колебаний. В этом случае на замедленном движении на основе замеренного угла поворота корпуса судна при помощи интерполяции определяется кинематическое уравнение вращения вида φ(t)=ƒ1(t) (θ(t)=ƒ1(t), в котором  - угол остановки при реверсе корпуса судна. На основании полученного уравнения составляется уравнение второго этапа - обратного симметричного движения на том же угловом интервале при t∈[t2+Δ 2t2-t1+Δ], при Δ≥0, где Δ - время, необходимое для затухания волновых колебаний и течения жидкости; на втором этапе по составленному уравнению вращательного движения либо по программному движению с обратным знаком углового ускорения выполняется управляемое симметричное движение, корректируемое управляемым маховиком. Второй этап выполняется после выставления судна на начальный угол
- угол остановки при реверсе корпуса судна. На основании полученного уравнения составляется уравнение второго этапа - обратного симметричного движения на том же угловом интервале при t∈[t2+Δ 2t2-t1+Δ], при Δ≥0, где Δ - время, необходимое для затухания волновых колебаний и течения жидкости; на втором этапе по составленному уравнению вращательного движения либо по программному движению с обратным знаком углового ускорения выполняется управляемое симметричное движение, корректируемое управляемым маховиком. Второй этап выполняется после выставления судна на начальный угол  Регулятор для следящей системы управления по углу φ (θ) обеспечивает симметричность вращений. На угловых интервалах замедленного φ∈[φ1 φ2] (θ∈[θ1 θ2]) и ускоренного
Регулятор для следящей системы управления по углу φ (θ) обеспечивает симметричность вращений. На угловых интервалах замедленного φ∈[φ1 φ2] (θ∈[θ1 θ2]) и ускоренного  вращений замеряется затраченная энергия, на основе чего определяются работы электродвигателя т.е. работы активных моментов
вращений замеряется затраченная энергия, на основе чего определяются работы электродвигателя т.е. работы активных моментов  и
и  и узловые значения угловой скорости маховика Ωx (Ωy) и
и узловые значения угловой скорости маховика Ωx (Ωy) и  На границах данных интервалах определяются значения угловых скоростей судна
На границах данных интервалах определяются значения угловых скоростей судна 
 и
и  Для двух симметричных участков движения составляются динамические уравнения по теореме изменения механической энергии механической системы и присоединенной жидкости. Для эксперимента по углу крена:
Для двух симметричных участков движения составляются динамические уравнения по теореме изменения механической энергии механической системы и присоединенной жидкости. Для эксперимента по углу крена:


по углу дифферента:


где Т и Т' - кинетические энергия при замедленном и обратном ускоренном движении на рассматриваемых угловых положениях; В и В', С и С' - работы диссипативных моментов электродвигателя и диссипативных моментов во вращательных кинематических парах; D и D', Е и Е' - работы гидродинамических диссипативных моментов и восстанавливающих моментов соответственно. Здесь и далее штрихом обозначены выражения для обратных движений.
Удвоенные кинетические энергии определяются следующим образом для угла крена:




для угла дифферента:




Работы Аφ (Аθ) и  крутящего момента Меφ (Меθ) и диссипативные моменты трения электродвигателя Вφ (Вθ) и
крутящего момента Меφ (Меθ) и диссипативные моменты трения электродвигателя Вφ (Вθ) и  в подшипниках электродвигателя определяются из выражений:
в подшипниках электродвигателя определяются из выражений:


Работы восстанавливающих моментов для небольших углов колебаний и гидродинамические диссипативные моменты определим следующим образом:






Предполагается, что коэффициенты моментов трений, диссипативного гидродинамического момента и восстанавливающих моментов системы являются постоянными. При малом изменении осадки судна предполагается, что коэффициенты моментов трения в опорах стенда остаются неизменными. Работы диссипативных моментов вязкого трения с коэффициентами b определим как:


Вычитая из уравнение (2) из (1) или (4) из (3), в предположении, что отрицательные работы диссипативных гидродинамических моментов одновременно с работами моментов трения во вращательных кинематических парах ввиду симметричности вращательных движений судна  и
и  равны между собой (в общем случае при любом порядке полиномов диссипативных моментов по углу крена
равны между собой (в общем случае при любом порядке полиномов диссипативных моментов по углу крена  либо дифферента
либо дифферента  , а также трений в опорах), и учитывая выражения (5)-(22), получим расчетные формулы для вычисления присоединенных моментов инерции по углу крена и дифферента.
, а также трений в опорах), и учитывая выражения (5)-(22), получим расчетные формулы для вычисления присоединенных моментов инерции по углу крена и дифферента.
Волной обозначены усредненные величины на двух движений в случае их недостаточной симметрии.
Идентификация присоединенного момента инерции тела по углу рыскания осуществляется следующим образом. Корпус судна закрепляют в опытовом бассейне жестким полым валом, вращающимся в подшипниках (обе вращательные кинематические пары застопорены) так, что может лишь вращаться вокруг вертикальной оси по углу ϕ. Упругое устройство и электродвигатель составляют гибридный двигатель. Ось электродвигателя с маховиком расположена соосно с осью вращения опорного вала и упругого устройства. Рассматривается плоское вращательное движение корпуса судна в горизонтальной плоскости Охy, вокруг вертикальной оси z, проходящей через центр масс судна. Момент инерции торсиона входит в Jzz.
К механической системе приложена пара сил, характеризуемая крутящим моментом электродвигателя Меϕ, приложен гидродинамический диссипативный момент Mdϕ, который будем считать приведенным к углу ϕ и обобщенный диссипативный момент трения Mƒϕ в подшипниках опоры и в электродвигателе Meƒϕ.
На первом этапе после предварительного выставления судна на начальное угловое положение путем закручивания торсиона на некоторый угол -π-≤ϕ0<0 рад осуществляется первоначальное свободное разгонное движение судна. Данное движение переходит в программное замедленное вращение судна с определенным ускорением и рассматривается угловой интервал ϕ∈[ϕ1 ϕ2] на интервале времени t∈[t1 t2], на котором определяются узловые значения угловой скорости судна. Замедленное вращение может происходить также свободно в опыте по идентификации присоединенного момента инерции на собственной частоте колебаний. В этом случае на замедленном движении производится замер угла поворота корпуса судна и при помощи интерполяции определяется кинематическое уравнение вращения вида ϕ(t)=ƒ(t) с углом остановки  при реверсе судна, на основании которого составляется уравнение второго этапа - обратного симметричного движения на том же угловом интервале при t∈[t2+Δ 2t2-t1+Δ]. На втором этапе по составленному уравнению вращательного движения либо по программному движению с обратным знаком углового ускорения выполняется управляемое симметричное движение, корректируемое управляемым инерционным электроприводом. Второй этап выполняется после выставления судна на начальный угол . На угловых интервалах замедленного ϕ∈[ϕ1 ϕ2] и ускоренного
при реверсе судна, на основании которого составляется уравнение второго этапа - обратного симметричного движения на том же угловом интервале при t∈[t2+Δ 2t2-t1+Δ]. На втором этапе по составленному уравнению вращательного движения либо по программному движению с обратным знаком углового ускорения выполняется управляемое симметричное движение, корректируемое управляемым инерционным электроприводом. Второй этап выполняется после выставления судна на начальный угол . На угловых интервалах замедленного ϕ∈[ϕ1 ϕ2] и ускоренного  вращений замеряется затраченная энергия, на основе чего определяются работы электродвигателя
вращений замеряется затраченная энергия, на основе чего определяются работы электродвигателя  и
и  и узловые значения угловой скорости маховика Ωz и
и узловые значения угловой скорости маховика Ωz и  Аналогично опытам по углам крена и дифферента для двух симметричных участков движения ввиду симметричности вращательных движений судна
Аналогично опытам по углам крена и дифферента для двух симметричных участков движения ввиду симметричности вращательных движений судна  и
и  механической системы и присоединенной жидкости составляются динамические уравнения по теореме изменения механической энергии механической системы:
механической системы и присоединенной жидкости составляются динамические уравнения по теореме изменения механической энергии механической системы:


Работу момента упругого торсиона, согласно закону Гука при кручении, определим следующим образом:

Работы активного момента, момента трения электродвигателя, трения в опорах и диссипативного гидродинамического момента определим как:



Кинетические энергии для двух интервалов движений по углу рыскания:




Вычитая уравнение (24) из (23) с учетом симметрии движений получим:
В случае несимметричного судна, осуществляя однонаправленные движения можно получить для осевых присоединенных моментов инерций значения  где индекс p обозначает вращение и крен на левый борт, а также дифферент на нос; индекс s обозначает вращение и крена правый борт и дифферент на корму.
где индекс p обозначает вращение и крен на левый борт, а также дифферент на нос; индекс s обозначает вращение и крена правый борт и дифферент на корму.
Идентификация центробежных присоединенных моментов инерции для модели судна с продольной плоскостью симметрии (для которого существует ненулевые присоединенные моменты инерции |λ46|=|λ64|) осуществляется следующим образом. Рассмотрим судно с тензорами присоединенной инерции 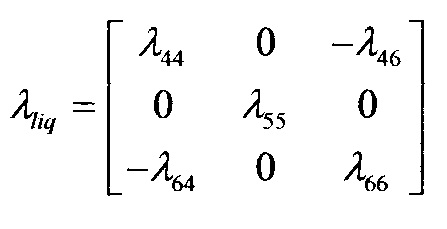 и демпфирования
и демпфирования  . Здесь присоединенные моменты инерции выбраны с отрицательным знаком. Предварительно проводятся идентификации осевых присоединенных моментов инерции предложенным методом на тех частотах, амплитудах и режимах движений, при которых необходимо определить центробежные присоединенные моменты инерции. Производится идентификация осевых Jxx, Jzz, λ44, λ66 и центробежного Jxz коэффициентов с учетом, установленных на корпусе трех идентичных по распределению массы электродвигателей с маховиками. Корпус судна закрепляется в опытовом бассейне с жестким полым валом, через трехосевой карданов подвес. Центры масс электродвигателей располагаются на продольной (электродвигатель по оси крена и рыскания) и вертикальной оси (электродвигатель по оси дифферента, под центром масс судна) судна на одинаковых малых расстояниях
. Здесь присоединенные моменты инерции выбраны с отрицательным знаком. Предварительно проводятся идентификации осевых присоединенных моментов инерции предложенным методом на тех частотах, амплитудах и режимах движений, при которых необходимо определить центробежные присоединенные моменты инерции. Производится идентификация осевых Jxx, Jzz, λ44, λ66 и центробежного Jxz коэффициентов с учетом, установленных на корпусе трех идентичных по распределению массы электродвигателей с маховиками. Корпус судна закрепляется в опытовом бассейне с жестким полым валом, через трехосевой карданов подвес. Центры масс электродвигателей располагаются на продольной (электродвигатель по оси крена и рыскания) и вертикальной оси (электродвигатель по оси дифферента, под центром масс судна) судна на одинаковых малых расстояниях  от центра масс для закрепления трехосевого карданного подвеса в точке центра масс судна и предотвращения начального крена либо дифферента судна при его свободном положении. Рассматривается сферическое вращательное движение корпуса судна по двум осям (крена и рыскания) при помощи соответствующих двух электродвигателей. Третий двигатель выполняет функцию компенсации вращения модели по углу дифферента. Идентификация параметра λ46 происходит в несколько этапов и повторяет шаги необходимые для определения осевых присоединенных моментов инерции, которые выполняются вместе с той разницей, что тело по двум углам на некоторых интервалах движения двигается с одинаковыми скоростями.
от центра масс для закрепления трехосевого карданного подвеса в точке центра масс судна и предотвращения начального крена либо дифферента судна при его свободном положении. Рассматривается сферическое вращательное движение корпуса судна по двум осям (крена и рыскания) при помощи соответствующих двух электродвигателей. Третий двигатель выполняет функцию компенсации вращения модели по углу дифферента. Идентификация параметра λ46 происходит в несколько этапов и повторяет шаги необходимые для определения осевых присоединенных моментов инерции, которые выполняются вместе с той разницей, что тело по двум углам на некоторых интервалах движения двигается с одинаковыми скоростями.
На первом этапе после предварительного выставления судна на начальные угловые положения на некоторые одинаковые углы φ0 и ϕ0 (обобщенный угол ξ0), осуществляются программные вращения судна по двум степеням свободы, состоящие из разгонного и замедленного этапов с совпадающим знаком углового ускорения и рассматривается угловой интервал ξ∈[ξ1 ξ2] на интервале времени t∈[t1 t2], на котором определяются узловые значения угловых скоростей судна. На втором этапе по программному движению с обратным знаком угловых ускорений выполняется управляемое симметричное движение на том же угловом интервале при t∈[t2+Δ 2t2-t1+Δ], корректируемое управляемыми электродвигателями. Второй этап выполняется после выставления судна на начальный угол  , определенный как угол остановки при реверсе судна на первом этапе. Здесь ξ≡φ≡ϕ - обобщенный угол поворота, за который принимается угол крена или рыскания. На угловых интервалах замедленного ξ∈[ξ1 ξ2] и ускоренного
, определенный как угол остановки при реверсе судна на первом этапе. Здесь ξ≡φ≡ϕ - обобщенный угол поворота, за который принимается угол крена или рыскания. На угловых интервалах замедленного ξ∈[ξ1 ξ2] и ускоренного  сферического вращения замеряется затраченная энергия, на основе чего определяются работы электродвигателей Аφ, Аθ, Аϕ и
сферического вращения замеряется затраченная энергия, на основе чего определяются работы электродвигателей Аφ, Аθ, Аϕ и  и узловые значения угловой скорости трех маховиков. Считая, что третий электродвигатель полностью компенсирует дифферент судна, тогда датчики углов поворота в карданном подвесе непосредственно измеряют углы крена и рыскания судна. Запишем кинетические энергии судна и трех двигателей с маховиками:
и узловые значения угловой скорости трех маховиков. Считая, что третий электродвигатель полностью компенсирует дифферент судна, тогда датчики углов поворота в карданном подвесе непосредственно измеряют углы крена и рыскания судна. Запишем кинетические энергии судна и трех двигателей с маховиками:




работы диссипативного центробежного гидродинамического момента:

Для двух симметричных участков сферического движения механической системы и присоединенной жидкости составим уравнения энергии:


С учетом симметричности движений  и
и  кинетические энергии преобразуются к виду:
кинетические энергии преобразуются к виду: 
работы центробежного гидродинамического момента:

Коэффициентами перекрестных связей восстанавливающих моментов при больших амплитудах колебаний пренебрегаем.
Вычитая уравнение (39) из (38) получим:
Эксперименты желательно в точности повторить несколько раз, совершив n≥10 симметричных разгонно-тормозных вращательных движений с одинаковыми условиями движений и рассчитать среднее арифметическое из полученных значений  . Крутящий момент электродвигателя может быть определен по измерению его тока, а при помощи таходатчика определена угловая скорость маховика. Датчик скорости маховика и судна могут быть бесконтактными, что снижает трение системы. Приближенные коэффициенты математической модели электродвигателя и его момента трения могут быть получены из паспорта электродвигателя. Коэффициент потерь электродвигателя может быть оценен из испытаний с эталонным телом или рассчитан известными методами в зависимости от типа электродвигателя и его управляющего устройства. Коэффициентом потерь при расчете работ электродвигателей могут учитываться потери в стали, магнитные и электрические потери электродвигателя, коммутационные и потери проводимости управляющего устройства и прочие потери для которых известно их аналитическое описание. Определение момента двигателей может происходить без датчика тока, если точна, известна математическая модель двигателя, управляющего устройства, и определены его коммутационные потери и потери проводимости. Для решения задачи идентификаций на режиме выбега и непрограммном первом этапе судна, используется, в основном, энергия торсиона, которая меньше подвержена неучтенной диссипации энергии, чем электродвигатель и позволяет меньше возмущать жидкость при выходе на программную траекторию. При идентификации на режиме установившихся реверсивных колебаний (в этом случае может задаваться программная гармоническая траектория), движение судна может начинаться из нулевых начальных значений его угловых положений, а также при отсутствии паузы при реверсе колебаний. При обработке колебаний, возможно, рассмотреть для расчета два наиболее симметричных между собой интервала из полученного набора. Аналитическая обработка результатов измерения и составление задающей траектории вращения судна для следящей системы управления электродвигателем выполняется на вычислительном устройстве.
. Крутящий момент электродвигателя может быть определен по измерению его тока, а при помощи таходатчика определена угловая скорость маховика. Датчик скорости маховика и судна могут быть бесконтактными, что снижает трение системы. Приближенные коэффициенты математической модели электродвигателя и его момента трения могут быть получены из паспорта электродвигателя. Коэффициент потерь электродвигателя может быть оценен из испытаний с эталонным телом или рассчитан известными методами в зависимости от типа электродвигателя и его управляющего устройства. Коэффициентом потерь при расчете работ электродвигателей могут учитываться потери в стали, магнитные и электрические потери электродвигателя, коммутационные и потери проводимости управляющего устройства и прочие потери для которых известно их аналитическое описание. Определение момента двигателей может происходить без датчика тока, если точна, известна математическая модель двигателя, управляющего устройства, и определены его коммутационные потери и потери проводимости. Для решения задачи идентификаций на режиме выбега и непрограммном первом этапе судна, используется, в основном, энергия торсиона, которая меньше подвержена неучтенной диссипации энергии, чем электродвигатель и позволяет меньше возмущать жидкость при выходе на программную траекторию. При идентификации на режиме установившихся реверсивных колебаний (в этом случае может задаваться программная гармоническая траектория), движение судна может начинаться из нулевых начальных значений его угловых положений, а также при отсутствии паузы при реверсе колебаний. При обработке колебаний, возможно, рассмотреть для расчета два наиболее симметричных между собой интервала из полученного набора. Аналитическая обработка результатов измерения и составление задающей траектории вращения судна для следящей системы управления электродвигателем выполняется на вычислительном устройстве.
Таким образом, заявляемый способ имеет высокую производительность, не требует движителей, контактирующих с жидкостью, сводит к минимуму возмущение жидкости при проведении эксперимента, позволяет определять тензор присоединенной инерции тел в виде корпусов моделей судов на широком диапазоне частот и амплитуд колебаний, в том числе в связи с однонаправленностью движений позволяет определять осевые присоединенные моменты инерции для моделей судов с несимметричными формами корпусов.
Сущность предполагаемого изобретения поясняет Фиг. на которой изображено устройство для осуществления способа.
На Фиг. представлено:
- тело в виде корпуса судна 1,
- электродвигатели 2,
- маховики 3,
- подшипники 4,
- опорный вал 5,
- упругое устройство 6,
- опытовый бассейн 7,
- датчики углов поворота 8,
- карданов подвес 9,
- скользящая заделка 10,
Тело в виде корпуса судна 1 помещают в опытовый бассейн 7. При этом корпус судна 1 имеет центр масс О, который закреплен с кардановым подвесом 9, карданов подвес 9 закреплен с опорным полым валом 5, вращающимся в подшипниках 4, электродвигатели 2 с датчиками скорости закреплены на корпусе судна 1, маховики 3 закреплены на валу электродвигателей 2, упругое устройство 6 проходит внутри полого вала 5 и соединено с корпусом судна 1 и опорой опытового бассейна 7 при помощи скользящей заделки 10, позволяющей компенсировать растяжение-сжатие упругого устройства 6 вдоль его продольной оси. Датчики угла поворота 8 сцеплены с осями вращения рамок карданного подвеса 9. Датчик угла поворота 8 по углу рыскания имеет внешнее закрепление с опорой опытового бассейна 7.
Такое устройство позволяет задавать телу осевые и сферические симметричные угловые вращения с заданными программными движениями для различных режимов движения с одновременными замерами угла поворота тела и угловой скорости маховиков 3, позволяет учесть энергию, расходуемую на совершение движения тела и оценить приложенные активные моменты, что необходимо для определения тензора присоединенных моментов инерции заявляемым способом. В изобретении применяется упругое устройство (торсион) 6 с возможностью предварительной начальной зарядкой его потенциальной энергией, и электродвигатели 2 с функцией корректировки симметричных интервалов вращения судна с малым расходом энергии. Упругое устройство 6 и электродвигатели 2 составляют гибридный двигатель, маховики 3 соединены с ротором в электроприводах 2 без редуктора, валы датчиков угла поворота 8 сцеплены осями вращения рамок карданного подвеса 9. Допускается в качестве упругого устройства вместо торсиона (торсионного вала) использовать пружину кручения, при этом пружина может располагаться с небольшим зазором снаружи по поверхности вала. Использование пружины позволяет закреплять датчик угла поворота по углу рыскания непосредственно на судне без внешнего закрепления.
Устройство работает следующим образом. Для идентификации присоединенных осевых моментов инерции две рамки карданного подвеса 9 фиксируются таким образом, что позволяют вращаться телу по заданной одной оси вращения. В частности в опытах по идентификации присоединенного момента инерции по оси рыскания упругое устройство (торсион) 6, закрепленный одним концом на корпусе судна 1, а вторым на опоре опытового бассейна 7, закрученный вокруг своей горизонтальной оси на начальный угол задает начальное ускоренное вращательное движение вокруг неподвижной вертикальной оси корпусу судна 1 с установленным на его корпусе электродвигателем 2 (с интегрированным датчиком скорости) и маховиком 3. Ускоренное движение переходит в программное либо непрограммное замедленное движение с замерами угла поворота и угловой скорости судна. После этого корпус судна при необходимости выставляется на угол остановки на первом этапе и ему задается программное симметричное замедленному вращению ускоренное вращение с обратным знаком углового ускорения и замерами угловой скорости маховика 3. Симметричность программного движения обеспечена управляемым электродвигателем 2 с маховиком 3, корректирующим движение и упругим устройством 6, работающим на кручение. Измерение угла поворота и угловой скорости корпуса судна 1 осуществляет датчик угла поворота 8, соединенный с осью вращения карданного подвеса 9. Для идентификации присоединенных моментов инерции по углу крена и дифферента фиксируются попарно две других оси вращения рамок карданного подвеса 9, третьи рамки конструктивно выполняют роль вращательных кинематических пар. Судно отклоняется на заданный начальный угол крена либо дифферента и далее устройство работает аналогично опыту по углу рыскания. Симметричность движений обеспечивается электродвигателями 2. В опытах по идентификации присоединенных центробежных моментов инерции рамки карданного подвеса 9 свободны для вращения по всем трем осям, судно дополняется двумя электроприводами. Судно отклоняется на два начальных угла и происходят ускоренные движения, переходящие в программное либо непрограммное двухосевое замедленное движение с одинаковыми угловыми скоростями. Далее модели судна сообщается обратное сферическое ускоренное программное движение симметричное замедленному сферическому движению. Третий маховик работает в режиме компенсации вращательного движения судна по третьему углу. Симметричность движений обеспечивается при помощи трех электродвигателей, торсион обеспечивает начальное свободное вращательное движение по углу рыскания. В результате устройство обеспечивает корпусу судна 1 требуемые программные симметричные движения, которые необходимы для осуществления расчета тензора присоединенных моментов инерции тел.
Таким образом, предлагаемое изобретение позволяет решить задачу расширения функциональных возможностей за счет измерения компонентов тензора присоединенных моментов инерции тел на широком диапазоне частот колебаний при помощи симметричных программных и непрограммных движений на едином оборудовании, использование в расчетах однонаправленных движений позволяет применять способ для судов с несимметричными обводами корпуса.
Способ определения коэффициента квадратичной фазовой модуляции сверхкороткого оптического импульса
Способ деперсонализации персональных данных
Волоконно-оптическое устройство для измерения напряженности электрического поля
Способ получения резистивного элемента памяти
Способ оценки степени обогатимости минерального сырья оптическим методом и устройство для его реализации
Способ центрировки линзы в оправе и оправа для его осуществления
Способ центрировки линзы в оправе и оправа для его осуществления
Способ измерения параметров и характеристик источников излучения
Измельчительный механизм волчка
Способ обнаружения объекта на малых дистанциях и устройство для его осуществления
Способ идентификации присоединенного момента инерции тела и устройство для его осуществления
Способ идентификации гидродинамических параметров тела

