Результат интеллектуальной деятельности: Способ классификации целей, адаптированный к гидроакустическим условиям
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматической и автоматизированной классификации морских объектов, применительно к гидролокационным станциям ближнего действия при обнаружении эхо-сигнала в условиях зональной структуры поля.
Известны способы классификации эхо-сигнала, основанные на приеме эхо-сигнала гидролокатора на фоне шумов и помех в среде, преобразование акустического сигнала в электрический гидроакустической антенной, определении энергетического спектра электрического процесса на выходе гидроакустической антенны, представляющего собой смесь электрического сигнала и нормальной стационарной шумовой помехи, изложенные, например, в работе Евтютова Е.С. и Митько В.Б. "Примеры инженерных расчетов в гидроакустике", Судостроение, 1981 г., с. 77. Способ содержит спектральный анализ этого процесса, детектирование спектральных составляющих, интегрирование огибающей процесса и обнаружение сигнала при сравнении с порогом. При этом в качестве классификационного признака эхо-сигнала выбирается превышение уровня эхо-сигнала над уровнем помехи. Классификация осуществляется на классы эхо-сигнал и помеха. Похожий метод реализован в работе Яковлева А.Н., Каблова Г.П. "Гидролокаторы ближнего действия" Л.: Судостроение, 1983 г.
Классифицировать обнаруженные цели - объекты на классы помеха или объект с использованием имеющейся процедуры обработки в условиях зональной структуры акустического поля не представляется возможным. Известен способ обнаружения и классификации сигнала от цели по патенту РФ №2473924, который позволяет классифицировать цели на классы надводный и подводный объект. Способ содержит излучение сигнала, прием эхо-сигнала, согласованную фильтрацию, детектирование эхо-сигнала, сравнение с порогом и вывод на индикатор.
Прием сигнала осуществляют статическим веером характеристик направленности (ХН), при этом производят дискретизацию входной информации по всем каналам характеристик направленности, запоминают все принятые отсчеты, вычисляют порог, измеряют и запоминают амплитуды отсчетов, превысивших порог; измеряют и запоминают номера отсчетов, превысивших порог; измеряют и запоминают амплитуды отсчетов, имеющих максимальное значение и их номера, повторяют эти операции для последующих 3-х и более циклов излучения и приема эхо-сигнала, идентифицируют измеренные максимальные амплитуды отсчетов по характеристикам направленности, идентифицируют измеренные максимальные амплитуды отсчетов по времени приема, измеряют радиальную скорость объекта классификации, вычисляют дисперсию максимальных амплитуд отсчетов эхо-сигнала от объекта для 3-х и более циклов излучения и приема, а решение в пользу надводного объекта принимают при величине дисперсии амплитуд максимальных отсчетов больше порогового значения при постоянной радиальной скорости объекта классификации. В противном случае принимается решение в пользу подводной цели.
Недостатком указанного способа является трудность классификации объектов в условиях наличия зональной структуры поля, поскольку наличие нескольких одинаковых по интенсивности лучей приводит к интерференции эхо-сигнала, что сказывается на оценке дисперсии.
Задачей изобретения является обеспечение классификации подводной цели при распространении сигнала в условия зональной структуры поля.
Для решения поставленной задачи в известный способ, в котором излучают сигнал, принимают эхо-сигнал от объекта приемной антенны, производят дискретизацию входной информации, запоминают все принятые отсчеты, вычисляют порог по среднему значению всех отсчетов, производят обнаружение по превышению выбранного порога, измеряют и запоминают амплитуды отсчетов, превысивших порог; измеряют и запоминают номера отсчетов, превысивших порог, и производят выдачу информации на индикатор, введены новые операции, а именно измеряют распределения разреза скорости звука С по глубине Н, рассчитывают траекторию распространения лучей, определяют дистанцию начала выхода лучей на поверхность Др.нач, дистанцию окончания выхода лучей на поверхность Др.кон, если нет выхода лучей на поверхность, то дистанцию изменения направления лучей Драсч, определяют время первого превышения эхо-сигнала над помехой, измеряют длительность эхо-сигнала Тэхо по числу отсчетов, превысивших порог, при длительности эхо-сигнала Тэхо<Tпор, где Тпор - известная максимальная длительность эхо-сигнала от объекта, определяют дистанцию до объекта Доб по временному положению максимальной амплитуды эхо-сигнала, определяют по отраженному эхо-сигналу наличие зоны освещенности на поверхности и длительность эхо-сигнала Тэхо2, если длительность Тэхо2>Тпор, то эта длительность определяет ширину зоны освещенности, по отсчетам, превысившим порог обнаружения, измеряют дистанцию до начала отражения от поверхности зоны освещенности Днач по временному отсчету начала зоны, принимают решение, что цель подводная, если Доб<Днач, измеряют дистанцию до конца отражения от поверхности Дкон по временному отсчету конца длительности зоны и принимают решение, что цель подводная, если Дкон<Доб, в том случае, когда Тэхо2 отсутствует, и по расчету траектории лучи не выходят на поверхность Др.нач=0 и Др.кон=0, принимается решение, что цель подводная, если Драсч<Доб<Драсч, где Драсч - расчетная дистанция изменения траектории распространения сигнала, в противном случае принимается отказ от решения.
Технический результат состоит в обеспечении возможности автоматической классификации эхо-сигналов от подводных объектов в условиях наличия зоны освещенности.
Поясним достижение заявленного технического результата.
Физическая сущность предлагаемого способа заключается в следующем. Объекты, которые могут быть обнаружены гидролокатором ближнего действия, имеют различные физические характеристики. Объекты могут находиться на поверхности или быть погружены на различную глубину. Эхо-сигналы от этих объектов будут различаться по своим энергетическим характеристикам. Для автоматического обнаружения эхо-сигнала применяется стандартная процедура сравнения эхо-сигнала с порогом, для чего определяют уровень помехи по результату осреднения суммы всех дискретизированных отсчетов первого набора. Обработка эхо-сигнала начинается почти сразу же после окончания излучения. На вход приемной системы поступают дискретизированные отсчеты с выхода антенны последовательно по всем характеристикам направленности. После измерения помехи и выбора порога обнаружения следует процедура обнаружения эхо-сигнала, которая производится последовательно по всем характеристикам направленности. Определяются отсчеты эхо-сигнала, которые превысили порог, оценивается амплитуда отсчетов эхо-сигнала и длительность, временное положение отсчетов эхо-сигнала и их положение в характеристиках направленности.
При работе в реальных условиях существуют различные траектории распространения зондирующих сигналов и эхо-сигналов, которые определяются разрезом скорости звука по глубине и положением источника излучения - приема (В.Н. Матвиенко, Ю.Ф. Тарасюк «Дальность действия гидроакустических средств». Л.: Судостроение, 1981 г.). Для принятия автоматического решения о классе обнаруженного объекта предлагается воспользоваться результатами расчета гидроакустического поля, которые позволяют определить траекторию лучей и углы выхода лучей на поверхность. («Акустика океана» Наука. М., 1974 г., стр. 210-227). При условиях, соответствующих зональной структуре поля, основное направление движения энергии излучения зондирующего сигнала будет направлено попеременно сначала к поверхности, потом в направлении дна, затем снова к поверхности. Для рассчитанного вертикального угла распространения сигналов можно построить траектории, используя текущее распределение скорости в районе расположения гидролокатора и значение глубины погружения гидролокатора (В.А. Комляков «Корабельные средства измерения скорости звука и моделирование акустических полей в океане». Санкт Петербург.« Наука». 2003 г.).
Существующие методы расчета структуры звукового поля при известном распределении скорости звука по глубине и известном положении источника и приемника позволяют рассчитать траектории лучей при распространении сигналов. Для первой зоны освещенности на поверхности для гидролокатора ближней обстановки могут оказаться следующие ситуации: эхо-сигнал от объекта находится до начала выхода лучей на поверхность, эхо-сигнал находится в зоне лучей, выходящих на поверхность, и эхо-сигнал находится после зоны выхода лучей на поверхность. Как правило, в подавляющем большинстве случаев протяженность эхо-сигнала Тэхо от объекта существенно меньше, чем протяженность эхо-сигнала от зоны освещенности на поверхности Тэхо2. Пороговой оценкой протяженности Тпор может быть максимальная протяженность эхо-сигнала от подводного объекта. Поэтому необходимо измерить дистанцию до объекта и дистанция до начала зоны освещенности. Процедура расчета траектории распространения лучей известна и применяется во всех гидроакустических средствах. Определяется разность между дистанцией до начала отражения от поверхности Днач и дистанцией до объекта Доб, дистанцией до окончания отражения от поверхности Дкон. Если измеренная дистанция меньше дистанции Днач и если измеренная дистанция больше дистанции Дкон, то принимается решение, что объект подводный. Если окажется, что эхо-сигнала от поверхности не наблюдается и Др.нач=0 и Др.кон=0, то по результатам расчета поля можно определить Драсч. Это дистанция, которая соответствует изменению траектории распространении сигнала, и тогда классификация осуществляется по сравнению с измеренной дистанции и расчетной дистанцией Драсч.
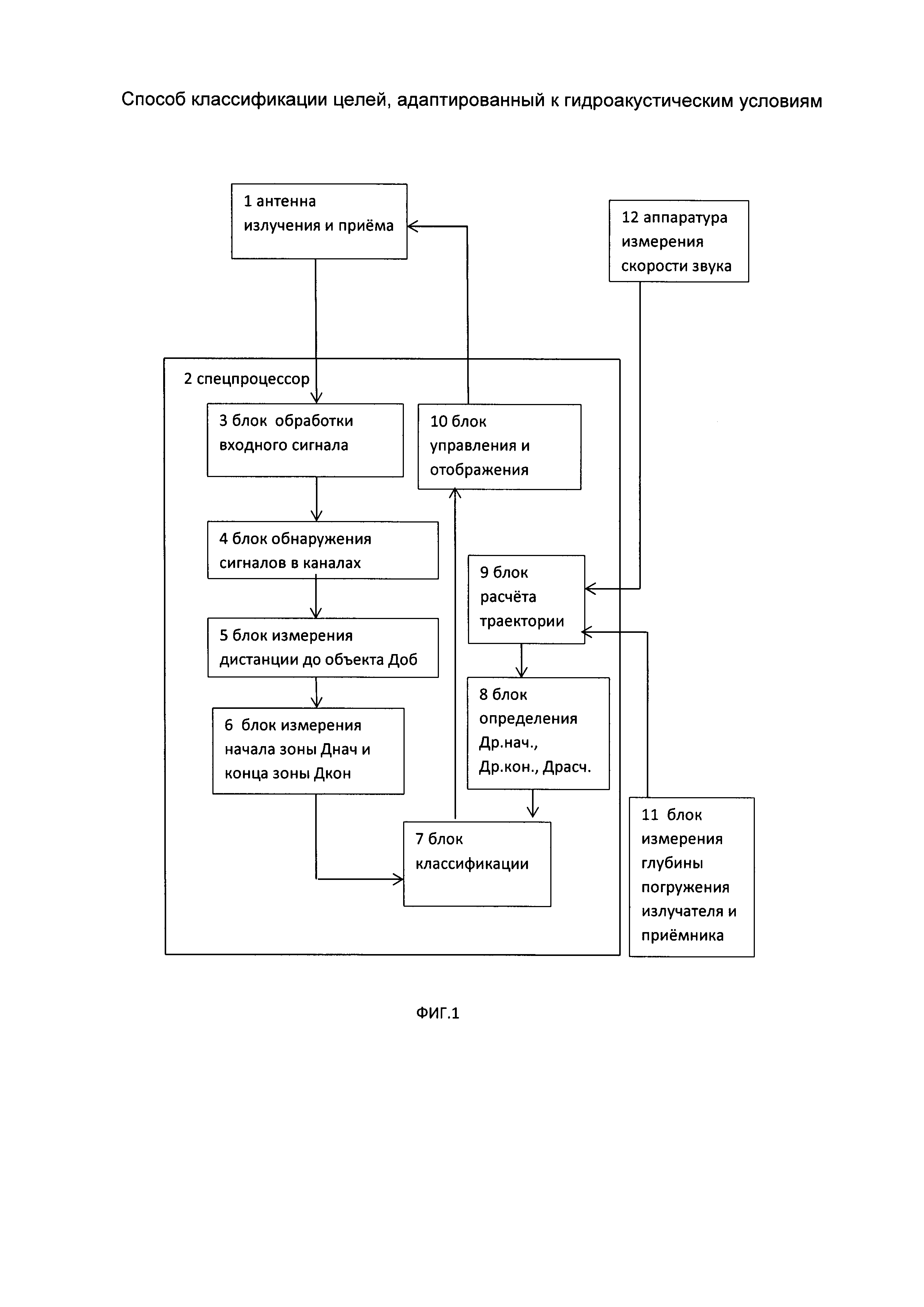
Сущность изобретения поясняется фиг. 1, на которой представлена блок-схема устройства, реализующего предлагаемый способ.
Устройство (фиг. 1) содержит антенну 1 излучения и приема, выход которой соединен со входом спецпроцессора 2. В состав спецпроцессора 2 входят последовательно соединенные блок 3 обработки входного сигнала, блок 4 обнаружения сигналов в каналах, блок 5 измерения дистанции до объекта Доб, блок 6 измерения начала зоны Днач и конца зоны Дкон, блок 7 классификации, блок 10 управления и отображения. Выход блока 10 соединен со входом блока 1 антенна излучения и приема. Аппаратура 12 измерения распределения скорости звука через первый вход блока 9 расчета траектории, через блок 8 определения Др.нач, Др.кон, Драсч соединена со вторым входом блока 7 классификации, а блок 11 измерения глубины погружения излучателя и приемника соединен со вторым входом блока 9 расчета траектории.
В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также измерение амплитуд эхо-сигналов и временных отсчетов, а также принятие решения о цели. Эти вопросы достаточно подробно рассмотрены в литературе (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт - Петербург. «Наука», 2004 г. Стр. 95-99, стр. 237-255).
Приемная антенна с системой формирования характеристик направленности являются известными устройствами, которые используются в современной гидроакустической аппаратуре (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника» Санкт - Петербург « Наука», 2004 г. Стр. 95-99, стр. 237-255).
Гидроакустические измерители скорости звука являются известными устройствами, они серийно выпускаются и устанавливаются совместно с гидроакустической аппаратурой (В.А. Комляков «Корабельные средства измерения скорости звука и моделирование акустических полей в океане». Санкт Петербург. «Наука». 2003 г. Стр. 169-227).
Работа способа с использованием рассматриваемого устройства происходит следующим образом. Зондирующий сигнал излучается антенной 1 и этой же антенной принимается. Принятые эхо-сигналы обрабатываются процессором 2, в составе которого имеются блок 3, где происходит согласованная фильтрация детектирование в цифровом виде принятых эхо-сигналов. Любой гидролокатор содержит антенну излучение и приема, это известные устройства, которые широко используются на практике и реализованы в прототипе. В блоке 4 спецпроцессора 2 производится выбор порога и обнаружение эхо-сигналов, которые превысили порог. По этим сигналам в блоке 5 определяется временная оценка положения эхо-сигнала и длительность Тэхо и определяется дистанция до объекта Доб. В блоке 6 производится определение эхо-сигналов, отраженных от поверхности, и определяется дистанция начала Днач отражения от поверхности и дистанция окончания отражения от поверхности Дкон и длительность Тэхо2. Эти данные поступают в блок 7 классификации, на второй вход которого поступает информация о результатах расчета поля. Предварительно до начала излучения производится измерение распределения скорости звука от глубины и расчет структуры звукового поля с использованием блока 9 расчета траектории, куда поступает информация о глубине погружения излучателя и приемника из блока 11. В блоке 9 рассчитываются траектории распространения сигналов, а в блоке 8 определяются размер зоны Др.нач, Др.нач и Драсч дистанция, соответствующая дистанции изменения направления траектории распространения. Расчет траектории распространения лучей является известной операцией, которая используется во всех гидроакустических комплексах. (В.Н. Матвиенко, Ю.Ф. Тарасюк «Дальность действия гидроакустических средств». Судостроение, Л., 1981 г.). Полученные в блоке 7 классификации решения передаются в блок 12 для отображения результатов на индикаторе. На индикаторе отображаются результаты расчета траектории распространения и результаты автоматической классификации обнаруженных объектов.
Таким образом, предлагаемая последовательность операций позволит автоматически классифицировать подводные объекты в условиях зональной структуры поля.
Способ классификации целей, адаптированный к условиям работы, содержащий излучение зондирующего сигнала, прием эхо-сигнала от объекта приемной антенны, дискретизацию входной информации, причем запоминают все принятые отсчеты, вычисляют порог по среднему значению всех отсчетов, производят обнаружение по превышению выбранного порога, измеряют и запоминают амплитуды отсчетов, превысивших порог; измеряют и запоминают номера отсчетов, превысивших порог, и производят выдачу информации на индикатор, введены новые операции, а именно измеряют распределения разреза скорости звука С по глубине Н, рассчитывают траекторию распространения лучей, определяют дистанцию начала выхода лучей на поверхность Д, дистанцию окончания выхода лучей на поверхность Д, если нет выхода лучей на поверхность, то дистанцию изменения направления лучей Д, определяют время первого превышения эхо-сигнала над помехой, измеряют длительность эхо-сигнала Т по числу отсчетов, превысивших порог, при длительности эхо-сигнала Т<Т, где Т - известная максимальная длительность эхо-сигнала от объекта - цели, определяют дистанцию до объекта Д по временному положению максимальной амплитуды эхо-сигнала, определяют по отраженному эхо-сигналу наличие зоны освещенности на поверхности и длительность эхо-сигнала Т, если длительность Т>Т, то эта длительность определяет ширину зоны освещенности, по отсчетам, превысившим порог обнаружения, измеряют дистанцию до начала отражения от поверхности зоны освещенности Д по временному отсчету начала зоны, принимают решение, что цель подводная, если Д<Д, измеряют дистанцию до конца отражения от поверхности Д по временному отсчету конца длительности зоны и принимают решение, что цель подводная, если Д<Д, в том случае, когда Т отсутствует и по расчету траектории лучи не выходят на поверхность, принимается решение, что цель подводная, если Д<Д<Д, где Д - расчетная дистанция изменения траектории распространения сигнала, в противном случае принимается отказ от решения.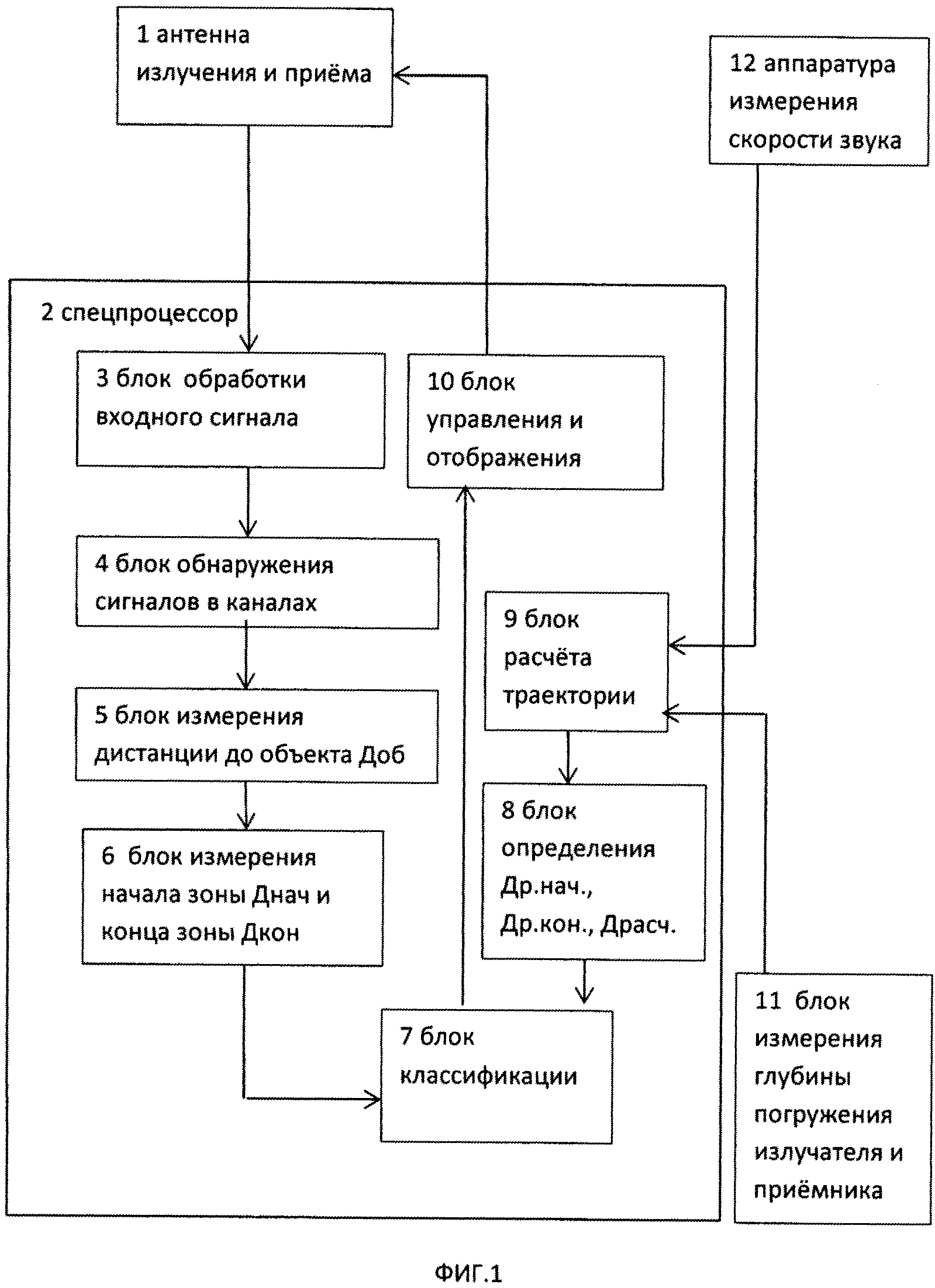
Способ измерения дистанции до шумящего объекта
Способ автоматической классификации
Способ обработки гидроакустического сигнала шумоизлучения объекта
Способ измерения толщины льда
Способ оценки дистанции до шумящего в море объекта
Способ адаптивной обработки сигнала шумоизлучения
Гидроакустический способ определения пространственных характеристик объекта
Способ классификации шумящих объектов
Способ измерения дистанции гидролокатором
Способ обработки сигнала шумоизлучения объекта
Способ измерения дистанции до шумящего объекта
Способ автоматической классификации
Способ обработки гидроакустического сигнала шумоизлучения объекта
Способ измерения толщины льда
Способ оценки дистанции до шумящего в море объекта
Способ адаптивной обработки сигнала шумоизлучения
Гидроакустический способ определения пространственных характеристик объекта
Способ классификации шумящих объектов
Способ измерения дистанции гидролокатором
Способ обработки сигнала шумоизлучения объекта

