Результат интеллектуальной деятельности: Наземное подвижное средство посадки (НПСП) беспилотного летательного аппарата (БЛА) и способ посадки БЛА на НПСП
Вид РИД
Изобретение
Область техники
Изобретения относятся к области авиации, к способу посадки беспилотного летательного аппарата (БЛА) на наземное подвижное средство посадки (НПСП), включая псевдоспутники на солнечных батареях.
Уровень техники
В настоящее время используются следующие способы посадки БЛА:
- по самолетному;
-с помощью парашюта;
- с помощью авиафинишера в два этапа.
На первом этапе осуществляется торможение путем зацепления БЛА с целью уменьшения кинетической энергии до приемлемого уровня, и на втором этапе захват и окончательное торможение.
Реализовано в США на БЛА с весом 18 и 68 кг.
Недостатком первых двух приведенных способов посадки являются использование шасси и парашюта, что приводит к ухудшению летно-технических характеристик БЛА за счет увеличения веса и нагрузки на крыло. Кроме того, для БЛА с небольшими скоростями посадки (50÷110) км /ч возникает проблема приземления с заданной точностью по боковому отклонению от оси ВПП при действии бокового ветра, так как парирование сноса БЛА ветром осуществляется отклонением угла курса, который достигает значительных величин, что приводит к необходимости снижения допустимых значений скорости ветра, чтобы приземлиться на ВПП заданной ширины. Но даже при слабом боковом ветре величиной 5 м/с на приведенных посадочных скоростях потребные углы отклонения БЛА по курсу для парирования сноса составляют 16°÷10°, и поэтому необходимо усложнять конструкцию шасси, а, следовательно, вес БЛА, что также снижает его ЛТХ.
Очевидно, что при выборе способа посадки БЛА желательно отказаться от использования шасси и парашюта, исключить или уменьшить до приемлемых значений влияние бокового ветра на точность приземления, что может быть достигнуто или изменением направления посадки или уменьшением скорости приземления (захвата) БЛА до допустимой величины.
До настоящего времени решению задачи посадки БЛА без шасси и парашюта не уделено должного внимания.
Прежде чем анализировать предлагаемые способы посадки БЛА без использования шасси, уместно провести основные характеристики летательных аппаратов, которые предположительно могли бы выполнять посадку без шасси. Диапазон изменения их характеристик представлен в таблице 1.
Знание этих характеристик позволит облегчить оценку предполагаемых способов посадки БЛА без использования шасси.
Известен способ посадки беспилотного самолета на неподвижные аэрофинишер, патент на изобретение RU №2399560, 30.06.2009, который заключается в том, что на посадочном режиме траекторию полета самолета формируют так, чтобы зацепление за приемный участок троса происходило при пролете или после пролета над этим участком, после чего выключают воздушный движитель и как можно интенсивнее тормозят самолет до заданной скорости, регулируя выпуск приемного троса. При этом для заданного диапазона скоростей захода на посадку в допустимых условиях эксплуатации конкретного типа самолета характеристики системы, захватывающей трос, определены так, чтобы ширина заметаемой гибким поводком полосы захвата была меньше точности управления по высоте траекторией полета этого типа самолета. После зацепления за приемный трос первого каскада аэрофинишера производится интенсивное поглощение кинетической энергии самолета посредством воздействия сосредоточенной силы на основной несущий элемент его конструктивно-силовой схемы. Далее на втором каскаде аэрофинишера, сопряженном с первым, торможение беспилотника до полной остановки осуществляется за счет определенного силового воздействия на его поверхность демпфирующих элементов этого каскада.
Недостатком этого способа посадки является сложность и большие габариты посадочного устройства, обусловленные характеристиками БЛА. Ограничение эксплуатационных перегрузок приводит к увеличению тормозного пути, и, следовательно, к увеличению габаритов посадочного устройства.
Общим недостатком способов посадки на неподвижный аэрофинишер является необходимость гашения всей кинетической энергии БЛА до момента приземления, удержания и фиксации его на причальном устройстве. Кардинальным образом решить проблему посадки БЛА без шасси можно с использованием подвижного средства посадки, на котором должна гаситься в результате торможения БЛА только часть кинетической энергии и осуществляться приземление, удержание и фиксация на платформу этого подвижного средства, и только после должно происходить торможение движущегося средства вместе с БЛА. На разгон подвижного средства до заданной скорости, меньшей скорости БЛА и дальнейшее торможение платформы с БЛА необходимы существенные перемещения платформы, зависящие от характеристик БЛА.
Известен «способ посадки летательного аппарата» по патенту №2208555 (28), 11.10.2001.
Изобретение относится к технике посадки беспилотных летательных аппаратов (ЛА). На ЛА устанавливают импульсный источник излучения. В пункте посадки на платформу устанавливают вертикальную поворотную раму, два приемника импульсного излучения от источника ЛА, вертикальную посадочную сеть с возможностью горизонтального перемещения по направляющим, вычислитель и тормозное устройство. На конечном участке захода ЛА на посадку его вводят в зону действия приемников, с помощью которых измеряют угол возвышения и боковое смещение ЛА относительно центра упомянутой оси. Далее вычисляют величины отклонений ЛА от программной траектории полета и корректируют траекторию полета ЛА для обеспечения его входа в сеть. При входе ЛА в сеть ее перемещают по направляющим рамы и гасят кинетическую энергию движения ЛА за счет вытягивания тросов тормозного устройства. Платформу устанавливают с возможностью поступательного перемещения по направлению горизонтальной оси, перпендикулярной плоскости сети, а на раме дополнительно устанавливают датчик линейного ускорения, дальномер и датчик начала вытягивания тросов тормозного устройства. На конечном участке захода ЛА на посадку измеряют текущую дальность от ЛА до пункта посадки и вычисляют текущее значение скорости сближения ЛА с пунктом посадки и потребное значение ускорения поступательного перемещения платформы, включают привод с помощью которого перемещают платформу, и в момент входа аппарата в сеть выключают привод по сигналу от датчика начала вытягивания тросов тормозного устройства.
В описании предлагаемого способа посадки авторы не приводят потребные перемещения подвижной платформы для уменьшения относительной скорости сближения БЛА с пунктом посадки, но указывают ускорение разгона платформы, которое равно 3,2 м/с2. Очевидно, что потребные перемещения платформы могут достигать десятки метров. Также не указывают потребные перемещения вертикальной рамы с сетью по направляющим для гашения кинетической энергии движения БЛА за счет вытягивания тросов тормозного устройства, которые также могут достигать десятки метров, так как на тормозном устройстве производится гашение всей кинетической энергии БЛА из-за остановки платформы в момент входа аппарата в сеть с целью ограничения перемещения платформы, а темп торможения (nх) ограничен допустимыми эксплуатационными перегрузками.
Кроме того, размеры вертикальной рамы с сетью должны быть больше габаритов БЛА, в частности, размаха крыла, чтобы не повредить крыло об раму, а сеть не обеспечивает распределенную нагрузку на конструкцию БЛА и выдерживание его горизонтального положения при торможении и приземлении, что снижает вероятность неповреждения БЛА.
Существенным недостатком рассмотренного способа посадки является неоправданная сложность, большие габариты и, практически, никакого преимущества перед неподвижными аэрофинишерами.
Препятствием использования предлагаемых способов посадки без шасси для выполнения посадки уже созданных БЛА является необходимость их дооборудования бортовыми приспособлениями для захвата БЛА и высокоточными индивидуальными системами наведения на посадочное устройство, а также сложность создания и использования средства посадки для БЛА разной размерности.
В январе 2016 года немецкий институт робототехники и мехатроники при германском центре авиации и космонавтики осуществил впервые посадку БЛА весом 21 кг на платформу длиной 4 м и шириной 5 м, установленную на автомобиль, движущийся со скоростью 75 км/ч (www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read_16413/#/gallery/21679).
Для реализации посадки БЛА был дооснащен оптической системой слежения, а на платформе расположены оптические мишени, ориентирующие БЛА при посадке. После того как БЛА достигал скорости «автомобиля» и осуществлялся «захват цели», он начинал плавное снижение на платформу при выдерживании с высокой точностью относительного расстояния между БЛА и мишенями, которое не превышало 0,5 м и относительной скорости между БЛА и «автомобилем», близкой к нулю. Процесс посадки похож на способ приземления вертолета.
Посадка БЛА на автомобиль при таком способе управления достигнута за счет создания высокоточной системы стабилизации нулевого расстояния и нулевой скорости между движущимися БЛА и автомобилем практически в безветренную погоду, что видно по поведению БЛА на видео в момент приземления в сеть, расположенную на платформе.
Этот впервые блестяще реализованный способ посадки БЛА на автомобиль, принятый за прототип, имеет следующие существенные недостатки:
- требуется дооснащение каждого БЛА специальной оптической системой слежения, что также снижает летно-технические характеристики БЛА;
- на достижение БЛА автомобиля, выравнивание скоростей, «захват цели», снижение на автомобиль и «вертолетную посадку» требуются значительные время и расстояния, пройденные автомобилем и, следовательно, увеличение потребных длин ВПП;
- существенно (неоправданно) повышаются требования к точности выдерживания относительных расстояния и скорости между БЛА и автомобилем, чтобы попасть на платформу в условиях действия ветровых возмущений.
Предлагаемые изобретения направлены на достижение технического результата, заключающегося в обеспечении посадки БЛА различной размерности, веса, посадочной скорости без использования шасси и парашюта и без необходимости дооснащения БЛА специальной аппаратурой управления.
Существенные признаки.
Для получения указанного технического результата в предлагаемом наземном подвижном средстве посадки (НПСП) беспилотного летательного аппарата (БЛА), включающем транспортное средство с установленным на нем причальным устройством (ПУ), содержащим платформу, оборудованную устройством торможения, удержания и фиксации БЛА на платформе и устройством безопасного приземления, и аппаратуру управления, транспортное средство выполнено в виде автомобиля; устройство: торможения, удержания и фиксации БЛА на платформе, состоит из двух установленных по бокам в концевой части платформы на поворотных механизмах Г-образных штанг, свободные концы которых соединены планкой, на которой на одинаковом расстоянии друг от друга крепятся тормозные ленты. Они опускаются вертикально вниз и через ролики, расположенные снизу платформы, меняя направление на 90°, входят в тормозные диски, которые устанавливают в начале платформы, под ней, содержащие в каждом диске катушку с тормозной лентой необходимой длины, причем Г-образные штанги установлены в дополнительные поворотные механизмы, выполненные с возможностью поворота Г-образных штанг на заданный угол против движения БЛА после его приземления на амортизационные подушки, обеспечивая его удержание и фиксацию на платформе тормозными лентами. Тормозные механизмы выполнены с возможностью устанавливать заданные усилия вытягивания тормозных лент из катушек. Аппаратура управления содержит датчик ускорения автомобиля, аппаратуру измерения относительных расстояния и скорости между БЛА и НПСП, метеостанцию измерения скорости встречного ветра, выходы которых соединены с входами компьютера, выходы которого подключены к блоку сопряжения для управления ускорением автомобиля, к дисплею, тормозным механизмам для установления заданных усилий вытягивания тормозных лент, и радиостанцию для выдачи команды отключения двигателя БЛА. Устройство безопасного приземления, содержащее несколько амортизационных подушек, расположенных на платформе, для гашения вертикальной скорости БЛА с нормальной перегрузкой не превышающей заданной.
Для получения указанного технического результата в предлагаемом способе посадки беспилотного летательного аппарата (БЛА) на наземное подвижное средство посадки (НПСП), включающем измерение относительных расстояния и скорости движения между БЛА и транспортным средством, с установленным на нем ПУ, во время догона БЛА транспортного средства БЛА приближается к началу ВПП на заданной скорости (Vпут), заданной высоте полета при выдерживании заданной линии пути вдоль оси ВПП, в начале которой стоит НПСП, выполненное в виде автомобиля, и на расчетном расстоянии БЛА от ВПП ( ), вычисляемом по формуле
), вычисляемом по формуле
 ,
,
где Vпут - путевая скорость БЛА, равная Vпут=V-W0;
W0 - постоянная составляющая встречного ветра;
 - конечная относительная скорость;
- конечная относительная скорость;
ан - номинальное ускорение разгона автомобиля;
автомобиль начинает ускоренное движение, для чего вычисляют разность значений заданного ускорения аЗАД и измеряемого текущего ускорения a(t), которые подают в компьютер. При этом заданное ускорение аЗАД, вычисляют как функцию:
азад=f(ΔVотн), где ΔVотн=Vотнтек(t)-Vотнзад(t), Vотнтек(t)=Vпут-Va(t), a
 , где Lотн(t) - относительное расстояние между БЛА и движущимся НПСП, Va(t) - скорость автомобиля. По разности ускорений управляют двигателем автомобиля, путем уменьшения скорости Vотнтек(t) до значения Vотнк с допустимой точностью, при котором БЛА догонит автомобиль. В процессе догона БЛА НПСП на заданном расстоянии, рассчитанном для данного типа БЛА, с НПСП подается радиокоманда на отключение двигателя БЛА и прекращение стабилизации высоты. В момент догона БЛА входит в причальное устройство (ПУ), затормаживается до скорости НПСП устройствами торможения с усилием(Ф), рассчитываемым по формуле:
, где Lотн(t) - относительное расстояние между БЛА и движущимся НПСП, Va(t) - скорость автомобиля. По разности ускорений управляют двигателем автомобиля, путем уменьшения скорости Vотнтек(t) до значения Vотнк с допустимой точностью, при котором БЛА догонит автомобиль. В процессе догона БЛА НПСП на заданном расстоянии, рассчитанном для данного типа БЛА, с НПСП подается радиокоманда на отключение двигателя БЛА и прекращение стабилизации высоты. В момент догона БЛА входит в причальное устройство (ПУ), затормаживается до скорости НПСП устройствами торможения с усилием(Ф), рассчитываемым по формуле:
Ф=G nx, где G - вес БЛА, nx - продольная перегрузка БЛА, не превышающая эксплуатационную. Торможение производится до необходимой скорости транспортировки БЛА, в процессе которого осуществляется его приземление, удержание и фиксация на платформе.
Описанная конструкция устройства позволяет осуществить посадку на НПСП БЛА различной размерности, веса, посадочной скорости без использования шасси и парашюта и без необходимости дооснащения БЛА специальной аппаратурой управления.
Перечень фигур.
Предлагаемые изобретения иллюстрируются чертежами, на которых изображены:
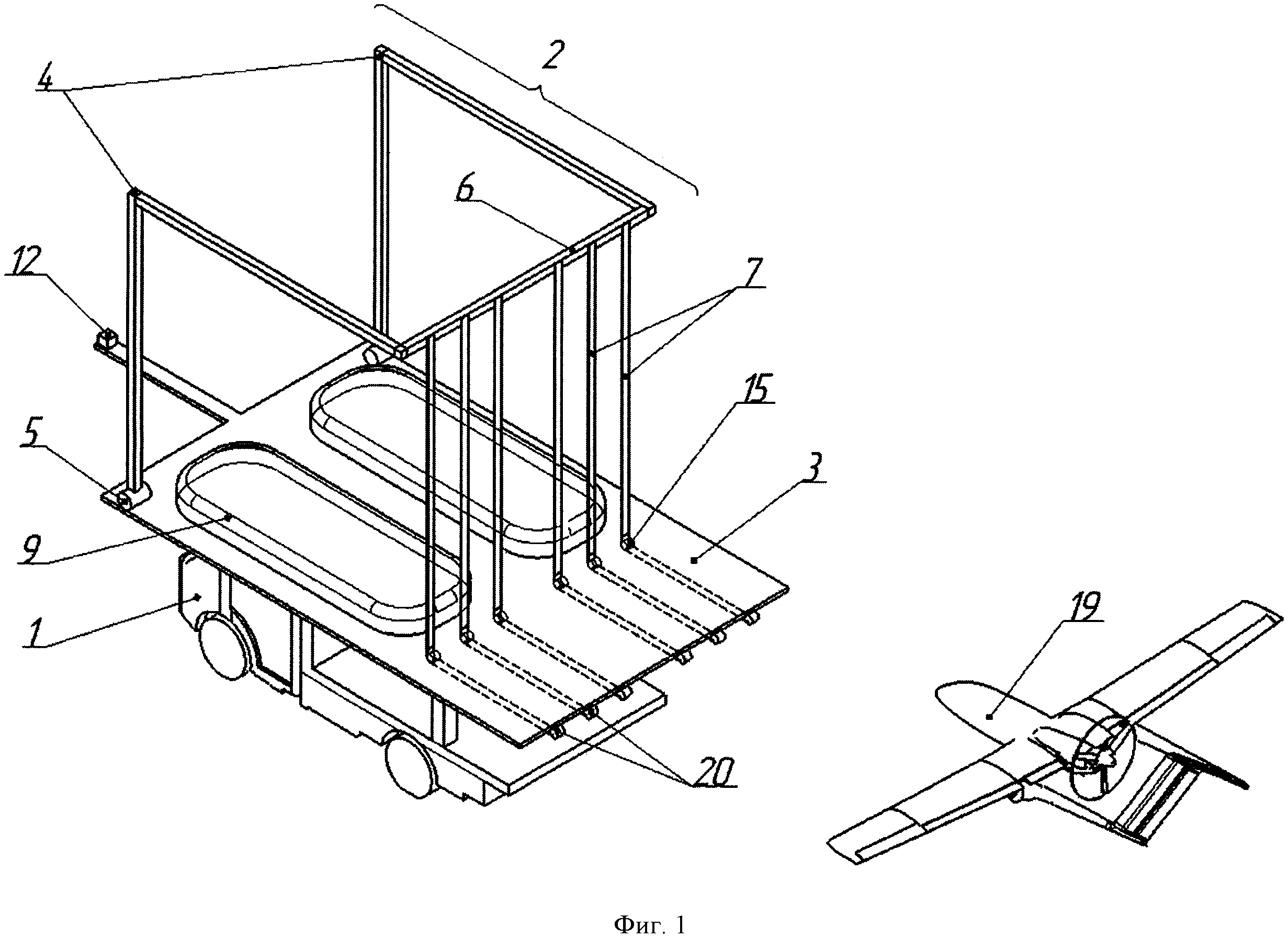
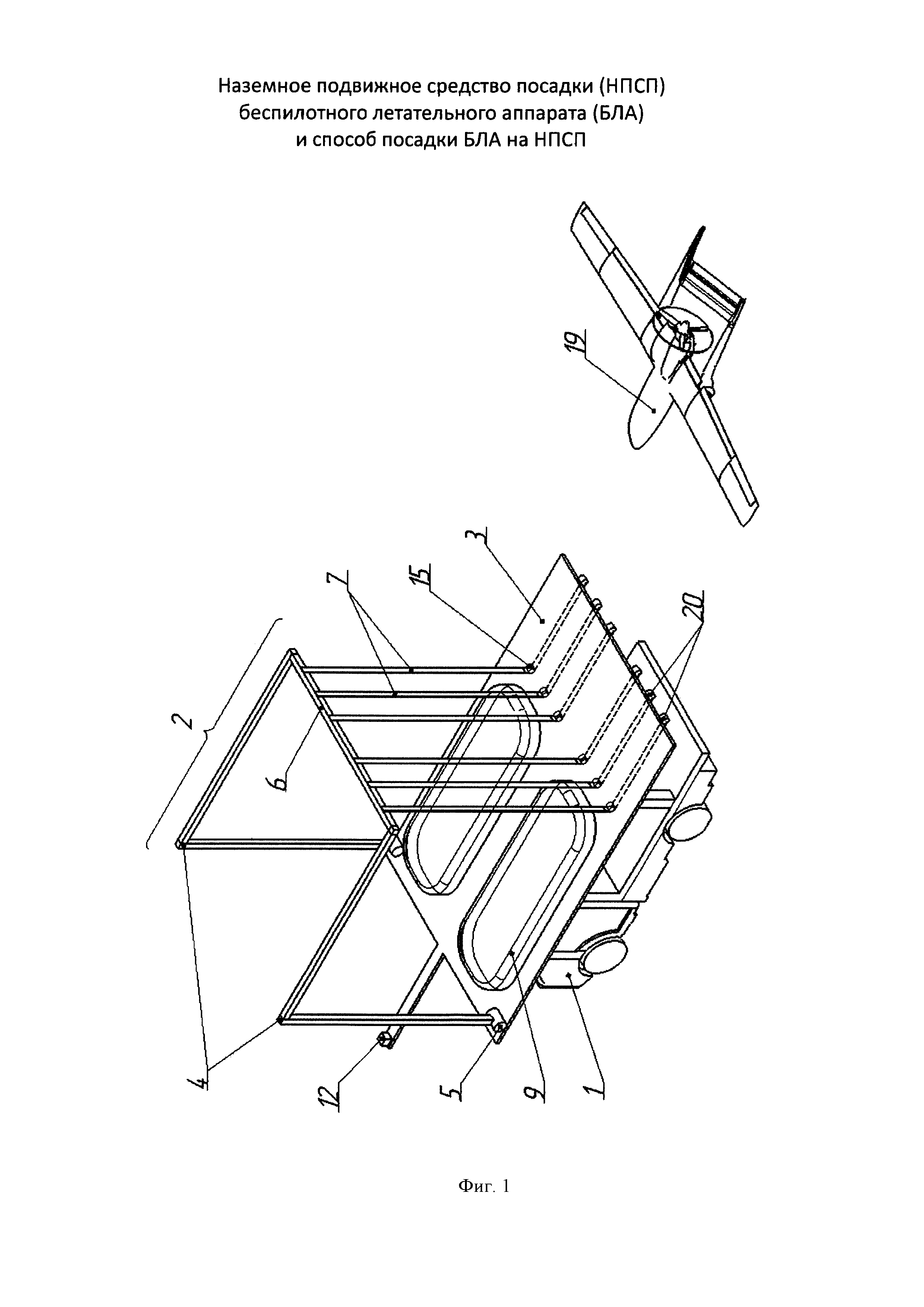
- на фиг. 1 приведен вид НПСП;
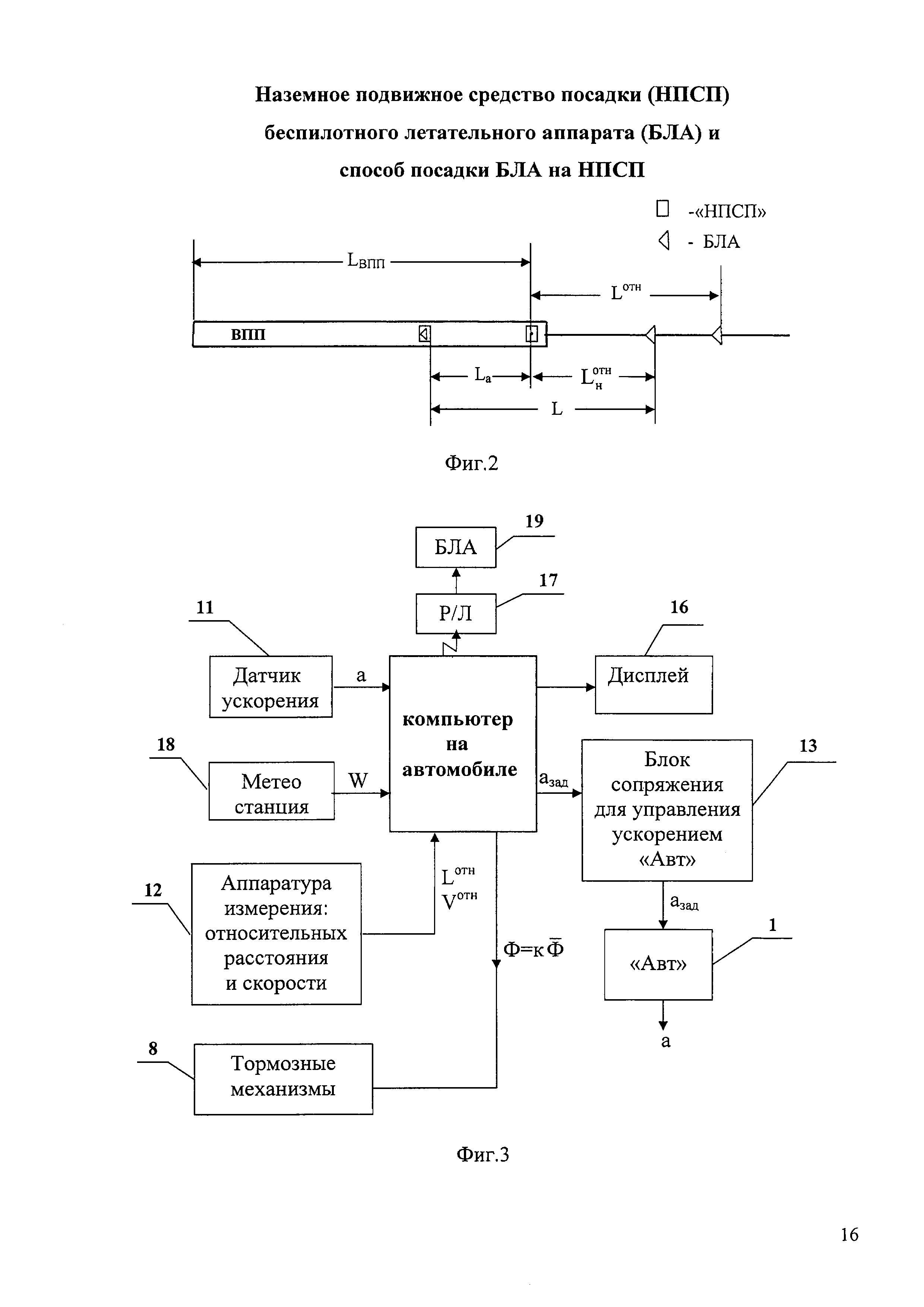
- на фиг. 2 показана схема посадки БЛА на НПСП;
где:
Lотн - расстояние между БЛА и «Авт»;
 - расстояние между БЛА и «Авт» в момент начала его движения;
- расстояние между БЛА и «Авт» в момент начала его движения;
La - расстояние, пройденное «Авт» до осуществления посадки БЛА на «Авт». (Lотн=0);
L - расстояние, пройденное БЛА с момента начала движения «Авт» до посадки;
- на фиг. 3 показана блок-схема управления автомобилем во время проведения посадки БЛА;
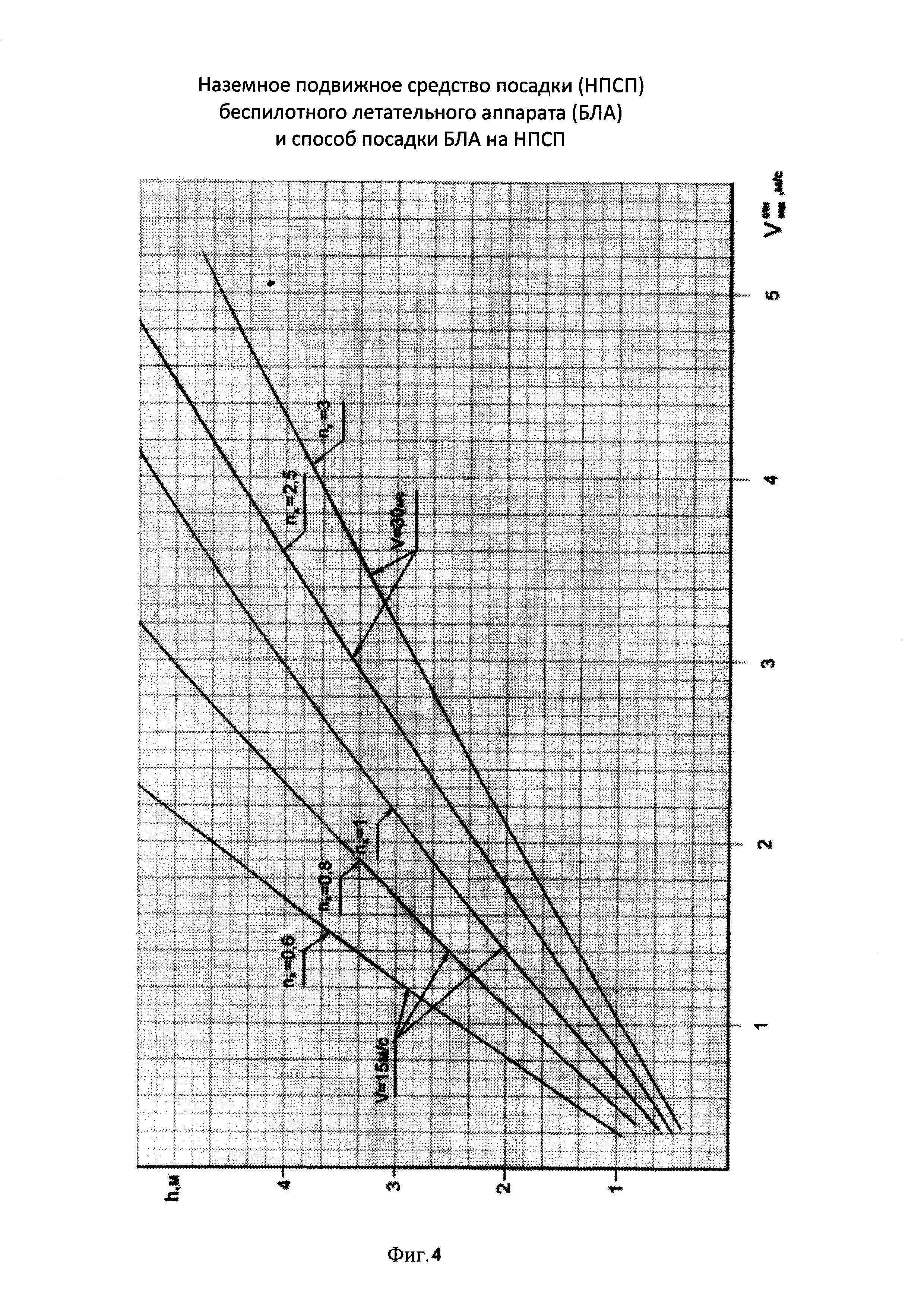
- на фиг. 4 представлены зависимости хода тормозной ленты h от заданной относительной скорости, скорости БЛА и продольной перегрузки БЛА nx;
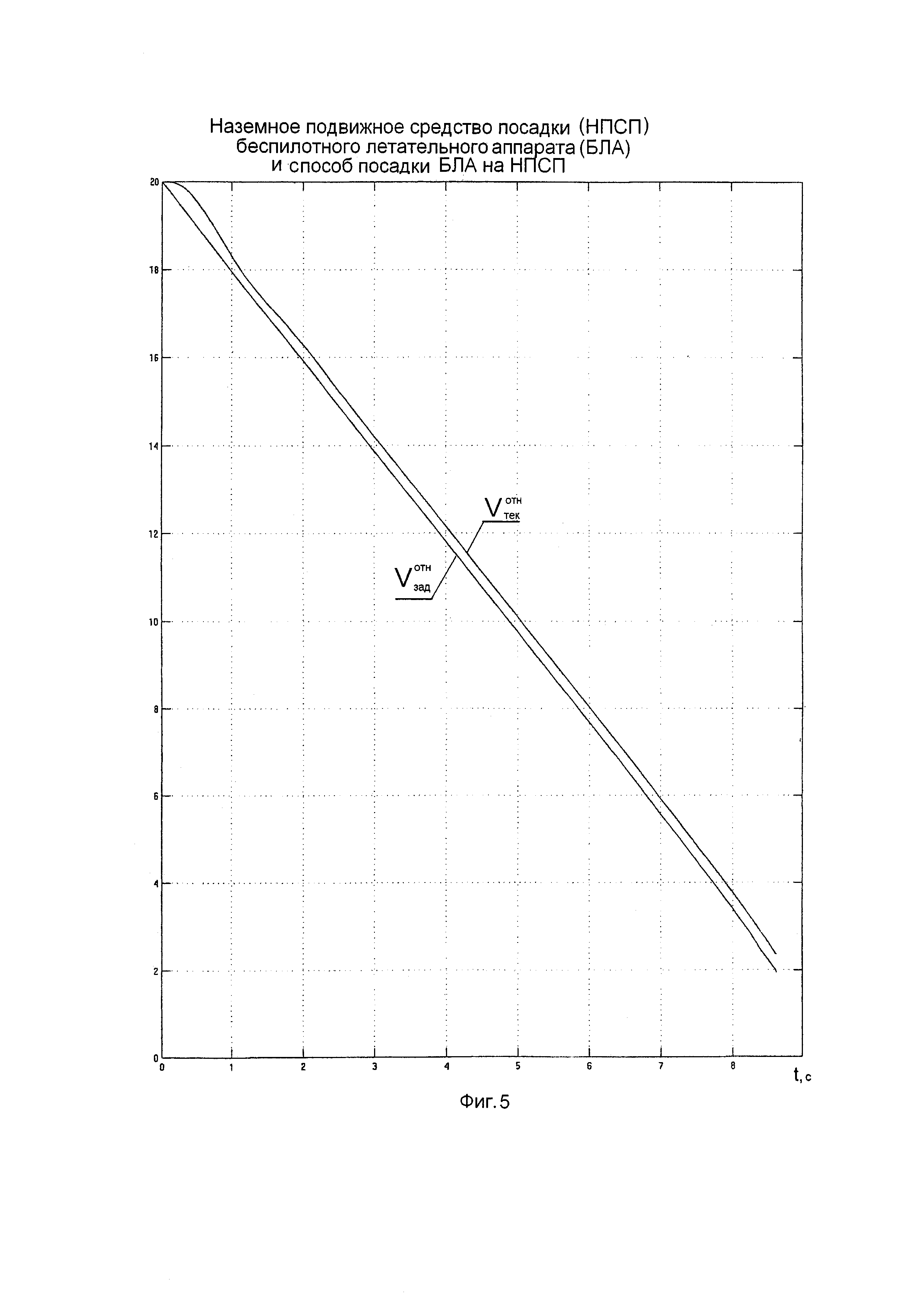
- на фиг. 5 показаны изменения заданной и относительных скоростей между БЛА и НПСП в функции времени;
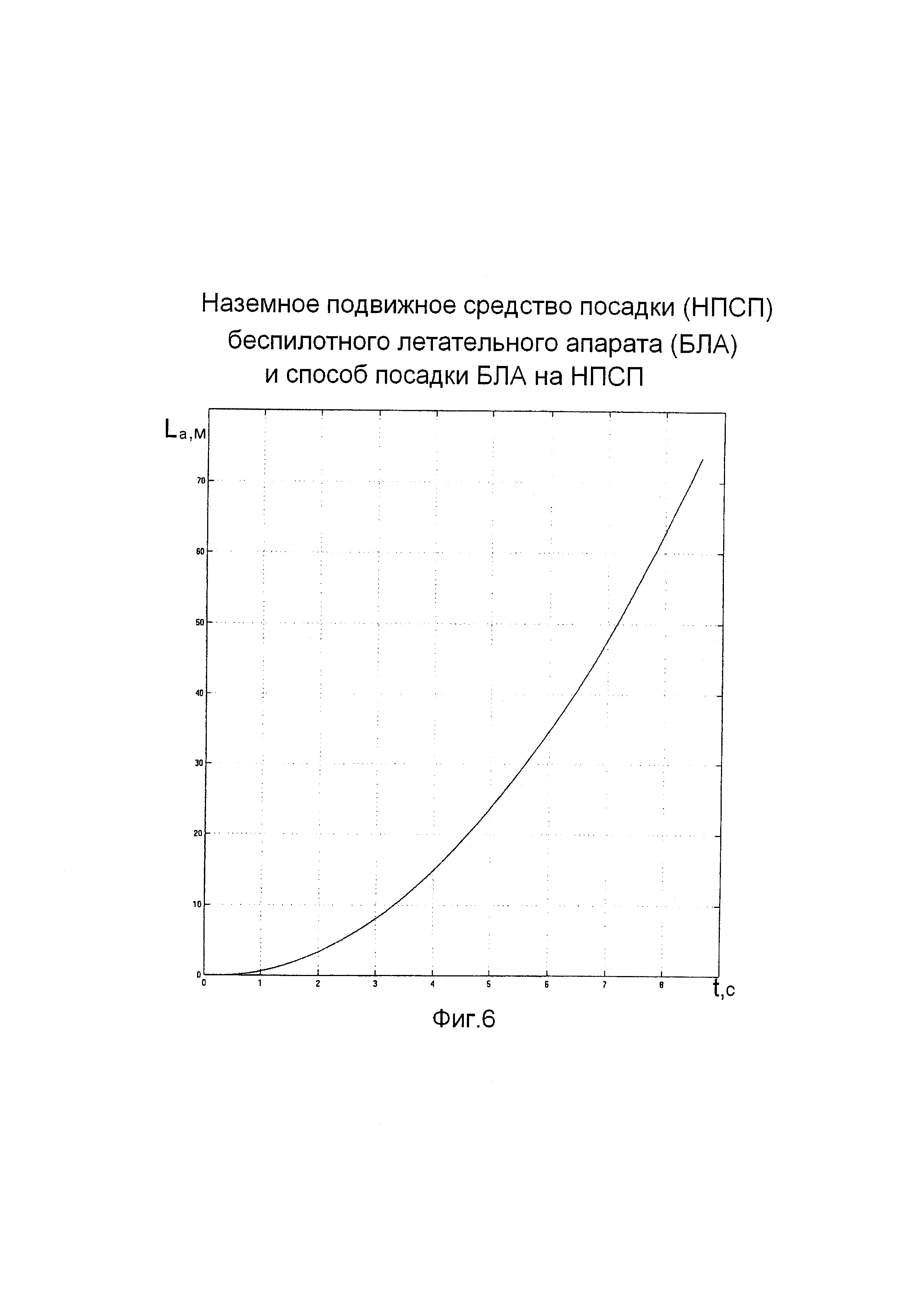
- на фиг. 6 приведено расстояние, пройденное НПСП до контакта с БЛА в функции времени;
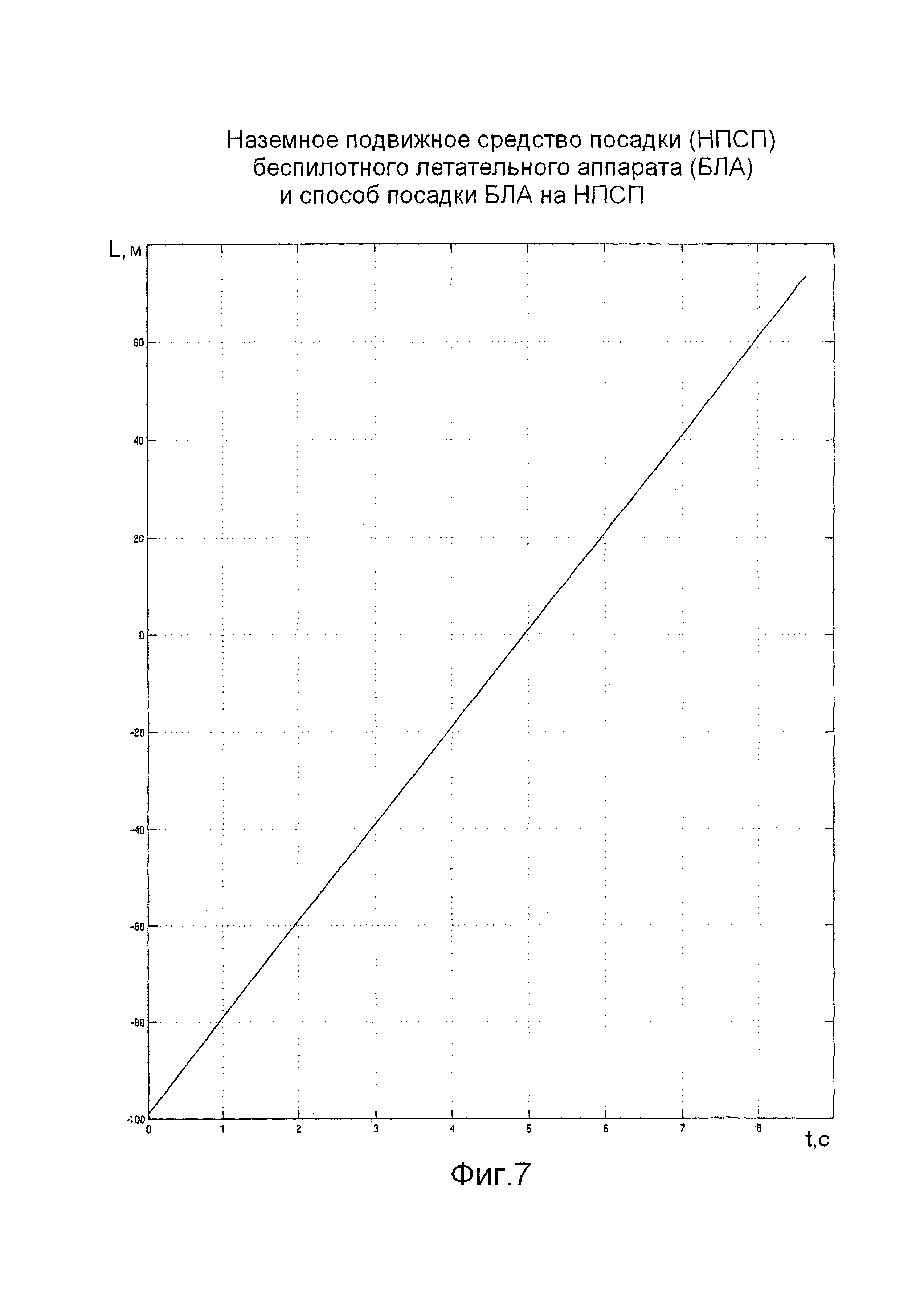
- на фиг. 7 приведено расстояние, пройденное БЛА в функции времени;
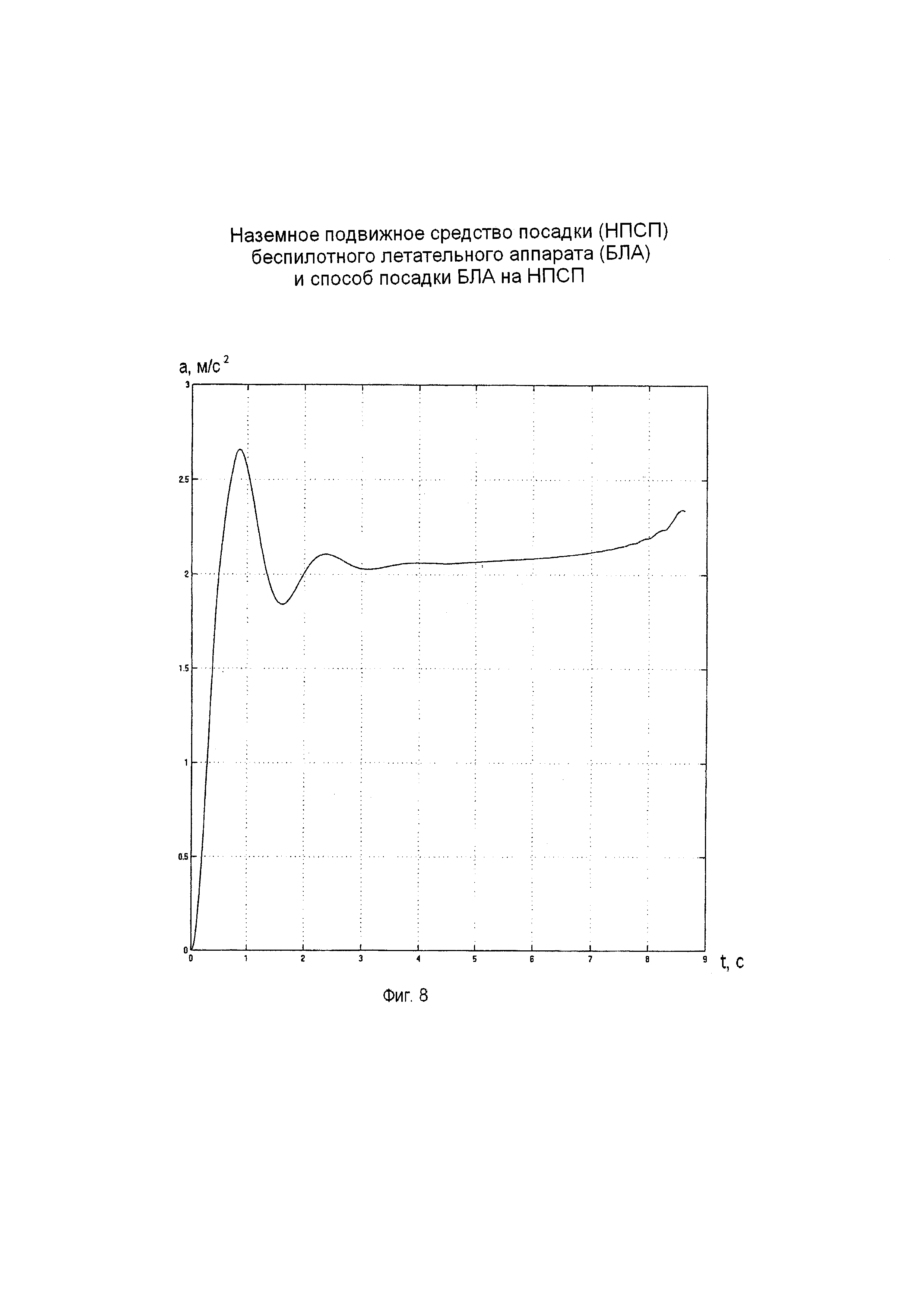
- на фиг. 8 приведено изменение ускорение автомобиля в процессе движения в функции времени.
Предлагаемое наземное подвижное средство посадки (фиг. 1) содержит автомобиль 1, причальное устройство 2, в состав которого включены платформа 3, установленная на автомобиль 1, на которой установлены устройство безопасного приземления, содержащее несколько амортизационных подушек 9, устройство торможения, удержания и фиксации БЛА на платформе, содержащее две поворотные Г-образные штанги 4, установленные по бокам в конце платформы 3, на поворотных механизмах 5. Планку 6, соединяющую концы Г-образных штанг, тормозные ленты 7, расположенные на планке 6, опущенные вертикально вниз, и через ролики 15, расположенные снизу платформы 3, меняя направление на 90°, входят в тормозные диски 20. Каждый диск 20 содержит катушку с тормозной лентой 7 необходимой длины, тормозной механизм 8.
Для управления посадкой БЛА на НПСП установлен компьютер 10, входы которого связаны с выходами датчика ускорения 11, аппаратуры 12 измерения относительных расстояния и скорости между БЛА и НПСП, метеостанции 18, а выходы соединены с входами блока сопряжения 13 для управления ускорением автомобиля НПСП, с тормозными механизмами 8, радиолинией 17, связанной с БЛА.
Тормозные ленты (ТЛ) 7 выполнены шириной ~(30÷50) мм и толщиной ~1 мм одним концом крепятся на одинаковом расстоянии друг от друга на планке 6 Г-образных штанг 4, опускаются вертикально вниз и через ролики 15, расположенные снизу платформы 3, меняя направления на 90°, входят в тормозные диски 20, которые устанавливаются в начале платформы 3, под ней. Ширина ТЛ 7 обеспечивает распределенную нагрузку на крыло БЛА.
Кроме того, начало платформы - со стороны приближения БЛА, конец платформы - над кабиной «автомобиля».
Длина платформы lп определяется как сумма длин lп=lнач+lmax+lзад,
где lнач - расстояние от начала платформы до тормозных лент lнач≈lф;
lср - расстояние от Ц.Т. до хвостового оперения,
lср≈(0,5÷3) м
lmax - максимальная длина тормозного пути БЛА;
lmax≈2÷5 м
lзад - расстояние от конца платформы до Г-образных штанг. В этой части платформы размещается аппаратура для измерения относительных расстояния и скорости между НПСП и БЛА.
lзад≈0,5 м
и, следовательно, lп≈(3÷8,5) м
Ширина платформы (lш) может быть вычислена как
lш=2ΔZ+2lбез, где
ΔZ - допустимое отклонение БЛА от линии пути,
lбез - величина увеличения ширины платформы для обеспечения безопасного приземления БЛА.
при ΔZ≈(1÷1,5) м и lбез≈1 м lш=(4÷5) м
Две Г-образные штанги устанавливаются по бокам платформы на расстоянии lзад от ее конца на поворотных механизмах, которые обеспечивают поворот штанг на заданный угол против движения подвижного средства посадки. Концы штанг соединены между собой планкой.
Высота штанг Нш может быть вычислена по формуле:
Нш=2ΔН+2Нбез.
где ΔН - допустимое отклонение БЛА от заданной высоты полета;
Нбез - величина увеличения высоты штанг для обеспечения безопасного приземления БЛА
при ΔН≈(0,5÷1) м и Нбез≈(0,5÷1) м,
Нш=(2÷4) м.
Заданная высота полета БЛА  будет равна
будет равна
 , или:
, или:  при Навт=2,5 м
при Навт=2,5 м
Длина горизонтальной части штанг равна lmax.
При этом количество тормозных дисков равно количеству тормозных лент. Тормозной диск 20 представляет из себя плоский диск, в котором размещены тормозной механизм 8, обеспечивающий установку заданного усилия вытягивания тормозной ленты 7, и катушка с тормозной лентой необходимой длины.
Предлагаемый способ осуществляют в следующей последовательности.
Автомобиль 1 НПСП стоит в начале ВПП. БЛА приближается к ВПП на заданной скорости (для конкретного БЛА), заданной высоте полета, зависящей от параметров автомобиля 1, а также при выдерживании заданной линии пути (вдоль оси ВПП). Никаких других требований по управлению движением к БЛА не предъявляется. Объектом управления при осуществлении посадки (причаливания) является автомобиль 1 НПСП.
Для управления автомобилем 1 на него установлена аппаратура управления, включающая датчики линейного ускорения 11 БЛА, метеостанцию 18, аппаратуру 12 для измерения относительных расстояния и скорости между автомобилем 1 НПСП и БЛА 19, выходы которых подключены к входам компьютера 10, а его выходы связаны с блоком сопряжения 13 для управления ускорением  автомобиля 1 НПСП, дисплеем 16, радиолинией 17, связанной с БЛА, для передачи команды на остановку двигателя БЛА и прекращения стабилизации высоты.
автомобиля 1 НПСП, дисплеем 16, радиолинией 17, связанной с БЛА, для передачи команды на остановку двигателя БЛА и прекращения стабилизации высоты.
Для осуществления предлагаемого способа посадки БЛА на НПСП выбирают и вводят в компьютер 10 заданную посадочную скорость БЛА(V), путевую скорость БЛА Vпут, равную относительной скорости движения между БЛА и НПСП в момент начала движения автомобиля 1 (Vнотн), относительную скорость в момент догона (Vкотн) и номинальное ускорение  разгона НПСП, меньшее по величине максимального ускорения
разгона НПСП, меньшее по величине максимального ускорения  , развиваемого НПСП, что обеспечивает необходимый запас по управлению при действии ветровых возмущений и ошибках стабилизации скорости БЛА.
, развиваемого НПСП, что обеспечивает необходимый запас по управлению при действии ветровых возмущений и ошибках стабилизации скорости БЛА.
Вычисляют: время догона, равное  ,
,
расстояние La, равное  ,
,
расстояние Lнотн, равное Lнотн=(L-La), где L=Vпутtк.
В момент начала движения НПСП расстояние БЛА от конца ВПП равно  , фиг. 2, а расстояние НПСП - равно LВПП.
, фиг. 2, а расстояние НПСП - равно LВПП.
При движении расстояние БЛА от конца ВЦП вычисляется как  , а расстояние НПСП - (LВПП-La(t)).
, а расстояние НПСП - (LВПП-La(t)).
Относительное расстояние Lотн(t) вычисляется как разность расстояний БЛА и НПСП до конца ВПП, т.е.
 , или
, или

Строятся зависимости:
 и
и
 где:
где:
 ,
,  . при t=0
. при t=0
Исключая t, получаем:
При приближении БЛА к началу ВПП на заданной скорости (Vпут), заданной высоте полета при выдерживании заданной линии пути вдоль оси ВПП, в начале которой стоит автомобиль НПСП, и на расчетном расстоянии БЛА от ВПП  , вычисляемом по приведенной формуле, НПСП начинает ускоренное движение путем вычисления разности значений измеряемого текущего ускорения a(t) и заданного ускорения азад(t), вычисляемого как функция aзад(t)=f(ΔVотн(t)), где:
, вычисляемом по приведенной формуле, НПСП начинает ускоренное движение путем вычисления разности значений измеряемого текущего ускорения a(t) и заданного ускорения азад(t), вычисляемого как функция aзад(t)=f(ΔVотн(t)), где: 
 ,
, 
и по разности ускорений Δa=aзад(t)-a(t) осуществляется управление двигателем автомобиля, уменьшая текущую относительную скорость  до значения
до значения  с допустимой точностью, при котором БЛА догоняет автомобиль.
с допустимой точностью, при котором БЛА догоняет автомобиль.
В момент догона БЛА наземного подвижного средства посадки он входит в причальное устройство (ПУ) 2, затормаживается им до скорости НПСП,
с усилием на тормозных лентах  , вычисляемым с использованием следующих формул:
, вычисляемым с использованием следующих формул:
 , ΔF=Фh,
, ΔF=Фh,  ,
,  , где
, где
Ф - усилие на тормозном механизме (ТМ),
к - количество тормозных дисков,
ΔF - кинетическая энергия БЛА, которая гасится на тормозных дисках, путем торможения БЛА до скорости автомобиля НПСП,
h - ход тормозной ленты, вытягиваемой из Т.У. 7, определяющий максимальную длину тормозного пути (lmax) и, следовательно, размер длины платформы.
h зависит от выбранной  и темпа торможения, который определяется продольной перегрузкой БЛА, равной
и темпа торможения, который определяется продольной перегрузкой БЛА, равной  и рассчитывается по формуле:
и рассчитывается по формуле:
На фиг. 4 приведены зависимости h от  при различных nх и скоростях полета БЛА равных 15 м/с и 30 м/с.
при различных nх и скоростях полета БЛА равных 15 м/с и 30 м/с.
Очевидно, что можно выбрать скорости  при соответствующем nх, когда h не превышает максимального значения даже при ошибках в выдерживании
при соответствующем nх, когда h не превышает максимального значения даже при ошибках в выдерживании  , равных
, равных  и Δnх=±0,15.
и Δnх=±0,15.
Следует отметить, что при выбранных значениях  и nх при изменении массы БЛА потребный h не меняется, изменяются только усилия на тормозных механизмах,
и nх при изменении массы БЛА потребный h не меняется, изменяются только усилия на тормозных механизмах,  .
.
После чего НПСП осуществляет торможение до необходимой скорости транспортировки БЛА или до полной остановки. В процессе торможения БЛА, продолжая выдерживать горизонтальное положение, опускается на амортизационные подушки устройства безопасного приземления, и осуществляется его удержание и фиксация на платформе.
В процессе догона БЛА наземного подвижного средства посадки оно устраняет отклонения БЛА от линии пути в случае превышения допустимых значений, путем смещения от оси ВПП. На заданном расстоянии БЛА от НПСП с него подается радиокоманда на отключение двигателя БЛА, и прекращение стабилизации высоты.
Управление НПСП может осуществляться как в автоматическом, так и в ручном режиме. Предпочтительнее автоматический режим, при котором увеличивается точность стабилизации заданной относительной скорости движения и уменьшаются потребные расстояния, пройденные «автомобилем» до осуществления посадки.
Пример.
На фиг. 5÷8 приводятся результаты моделирования движения автомобиля при его догоне БЛА «Пингвин», с момента начала движения до входа БЛА в причальное устройство. Приводятся изменение относительных заданной  и текущей
и текущей  скоростей между автомобилем и БЛА, (Фиг. 5) расстояния, пройденные «автомобилем» и БЛА до их контакта, в функции времени (фиг. 6, 7).
скоростей между автомобилем и БЛА, (Фиг. 5) расстояния, пройденные «автомобилем» и БЛА до их контакта, в функции времени (фиг. 6, 7).
Скорость движения БЛА «Пингвин» равнялась 20 м/с, максимальное ускорение «автомобиля» было принято аmax=3, номинальное ускорение, для которого рассчитывалось время догона, принято равным ан=2, конечная относительная скорость равнялась  =2 м/с. Как видно из рисунков, время догона составило менее 9 с, при этом расстояние, пройденное «автомобилем», менее 80 м. В конце режима текущая относительная скорость равнялась ~ 2,4 м/с. В процессе движения ускорение «автомобиля» не превышало 2,6 м/с2 (фиг. 8).
=2 м/с. Как видно из рисунков, время догона составило менее 9 с, при этом расстояние, пройденное «автомобилем», менее 80 м. В конце режима текущая относительная скорость равнялась ~ 2,4 м/с. В процессе движения ускорение «автомобиля» не превышало 2,6 м/с2 (фиг. 8).
В момент догона БЛА 19 наземного подвижного средства посадки он входит в причальное устройство 2, работа которого осуществляется следующим образом.
Нос фюзеляжа БЛА проходит между тормозными лентами 7 до касания их крылом БЛА, в результате БЛА затормаживается тормозными лентами 7, вытягиваемыми из тормозных дисков 20, до скорости НПСП, продолжая выдерживать горизонтальное положение, и в результате торможения НПСП, опускается на амортизационные подушки 9 устройства безопасного приземления.
После приземления путем поворота против движения БЛА на заданный угол, зависящий от высоты БЛА Г-образных штанг 4, поворотными механизмами 5, осуществляется удержание БЛА и фиксация его на платформе 3 тормозными лентами 7 за счет прекращения их выдвижения. После причаливания БЛА НПСП транспортирует БЛА или затормозится до полной остановки.
Длина тормозного пути, пройденного БЛА вдоль платформы, зависит от установленных тормозных усилий на всех тормозных лентах 7 и величины относительной скорости в момент начала торможения (Фиг. 4).
Поставленная задача посадки БЛА предложенным способом решается за счет причального устройства (ПУ), реализующего все необходимые этапы причаливания: торможение, безопасное горизонтальное приземление, удержание и фиксация на платформе.
Приведенные размеры платформы выбраны для БЛА с G=4÷1000 кг и V=(15÷30) м/с.
Реализация способа посадки БЛА на НПСП позволит улучшить летно-технические и эксплуатационные характеристики БЛА.



Устройство для идентификации типа шины, установленной на колесе транспортного средства
Способ определения аэродинамического нагрева высокоскоростного летательного аппарата в опережающих лётных исследованиях на крупномасштабной модели
Способ определения положения летательного аппарата относительно взлётно-посадочной полосы при посадке и система для его осуществления
Способ определения координат летательного аппарата относительно взлётно-посадочной полосы
Способ измерения удара на конструкции крепления бортового оборудования летательного аппарата при наличии в измеряемом процессе вибрационных и ударных нагрузок
Способ определения содержания частиц сажи в выхлопной струе авиационного газотурбинного двигателя в полёте
Способ формирования управляющего сигнала по углу крена модели гиперзвукового летательного аппарата (гла) для контроля аэродинамической идентичности по числам рейнольдса траекторий полёта модели и натурного изделия при проведении опережающих лётных исследований аэродинамических характеристик
Устройство для преобразования изменения сопротивления в напряжение
Способ определения функционального состояния пилота и система для его осуществления
Способ оценки средних за полёт концентраций токсичных примесей в воздухе гермокабин летательных аппаратов и в воздухе, поступающем от компрессоров газотурбинных двигателей, и устройство для его осуществления
Устройство для идентификации типа шины, установленной на колесе транспортного средства
Способ определения аэродинамического нагрева высокоскоростного летательного аппарата в опережающих лётных исследованиях на крупномасштабной модели
Способ определения положения летательного аппарата относительно взлётно-посадочной полосы при посадке и система для его осуществления
Способ определения координат летательного аппарата относительно взлётно-посадочной полосы
Устройство для отбора проб воздуха от авиационных газотурбинных двигателей при проведении испытаний на летающих лабораториях
Устройство для отбора проб воздуха в мотогондолах авиационных газотурбинных двигателей
Способ измерения азимутальной диаграммы направленности антенны в составе наземных подвижных объектов больших размеров и устройство для его осуществления
Способ измерения удара на конструкции крепления бортового оборудования летательного аппарата при наличии в измеряемом процессе вибрационных и ударных нагрузок
Способ определения содержания частиц сажи в выхлопной струе авиационного газотурбинного двигателя в полёте

