Результат интеллектуальной деятельности: Способ определения координат летательного аппарата относительно взлётно-посадочной полосы
Вид РИД
Изобретение
Область техники
Изобретение относится к области авиации, более конкретно к способу определения координат летательного аппарата относительно взлетно-посадочной полосы радиотехнической системой посадки летательного аппарата (ЛА), и может быть использовано для обеспечения посадки на необорудованных аэродромах и вертолетных площадках, в комплексе с другими посадочными системами, в качестве резервной посадочной системы.
Уровень техники
Известна «Точная посадочная система», которая включает как минимум четыре приемника, которые расположены в различных, заранее определенных, местах. В каждом приемнике есть точный таймер для измерения временного интервала между обнаруженным приемником запросным сигналом и ответным сигналом от самолетного ответчика (транспондера). Система включает также обрабатывающее устройство (компьютер) на базовой станции, которое принимает измеренные интервалы времени от приемников и вычисляет положение самолета. Положение самолета сравнивается с математическим описанием желаемой траектории захода, и позиционная ошибка затем передается на самолет. Любая желаемая траектория захода может быть математически представлена и может быть использована в системе, включая траектории, имеющие дуги, ступени и сегменты [STOLTZ JOHN RYAN; CLAWSON CARL WILLIAM. Pat. KR171428B].
К недостаткам указанной системы следует отнести необходимость размещения на аэродроме и ЛА дополнительного оборудования, необходимость передачи на каждый конкретный ЛА команд управления по линии передачи данных.
Известны патент СССР №1836642 от 08.04.91, патент РФ №2303796 от 26.01.2006, патент РФ №2348944 от 08.05.2007, патент РФ №2348981 от 03.07.2007 автора Артемова В.Т., описывающие способы автономного формирования посадочной информации для ЛА и устройства (систему) для осуществления этих способов.
Основным недостатком указанных изобретений является необходимость установки на земле большого количества (несколько десятков) «радиолокационных точечных отражателей».
Известна система ОСП (Оборудование системы посадки). В состав ОСП входят ближний приводной радиомаркерный пункт (БПРМ) и дальний приводной радиомаркерный пункт (ДПРМ), включающие в себя приводную радиостанцию (ПРС) и маркерный радиомаяк (МРМ). МРМ излучает модулированный по амплитуде сигнал на несущей частоте 75 мГц. Диапазон рабочих частот ПРС 150÷1300 кГц (λ≈2000÷230 м). Погрешность значений курсовых углов, получаемых на борту ЛА, не должна превышать ±5° при вероятности 95% [«Авиационные правила. Часть 139. Сертификация аэродромов. Том II. Сертификационные требования к аэродромам». Межгосударственный Авиационный комитет. 1996. 84 с.].
К недостаткам ОСП следует отнести отсутствие навигационного наведения по глиссаде, формируемой с помощью электронных средств, в результате чего заход по такой системе относится к «неточному заходу на посадку» [«ФЕДЕРАЛЬНЫЕ АВИАЦИОННЫЕ ПРАВИЛА ПОЛЕТОВ В ВОЗДУШНОМ ПРОСТРАНСТВЕ РОССИЙСКОЙ ФЕДЕРАЦИИ» 2002 года №136/42/51. http://www.radioscanner.ru/avia/file/norm01.html, - www.radioscanner.ru (всего 2), www.radioscanner.ru/avia/file/norm01.html ⋅ 152 КБ].
Известна радиолокационная система посадки (РСП). В радиолокационных системах посадки (РСП) определение положения самолета в пространстве осуществляется с помощью наземной радиолокационной станции (РЛС), информация об отклонениях самолета от заданной траектории передается на его борт по радио. Это обстоятельство позволяет существенно упростить бортовую радиоприемную аппаратуру. РЛС получили распространение в военно-морской авиации для посадки самолетов на авианосцы [Белогородский С.Л. Автоматизация управления посадкой самолета. Москва, «Транспорт», 1972. 352 с.].
РСП обеспечивает предупреждение столкновений самолетов в воздухе, не требует дополнительного бортового оборудования, применяется для всех, военных и гражданских, самолетов.
В состав РСП, кроме радиостанций и другого оборудования, входят:
- диспетчерский радиолокатор (ДРЛ) L-диапазона (1250-1350 МГц, λ≈23 см, в режиме вторичной радиолокации: запрос - 1030 МГц, ответ - 1090 МГц и 740 МГц), предназначенный для контроля и управления воздушным движением с круговым обзором в радиусе до 150 км;
- посадочный радиолокатор (ПРЛ) Х-диапазона (9120, 9400 МГц, длина волны λ≈3,2 см), предназначенный для управления самолетом при его снижении по глиссаде [Верещака А.И., Олянюк П.В. «Авиационное радиооборудование». Москва, «Транспорт», 1996. 343 с.].
ПРЛ наземных РСП имеет две, сканирующие в вертикальной и горизонтальной плоскостях, антенны.
Основным недостатком РСП является передача команд управления голосом по радио, в результате чего управление самолетом осуществляется с запаздыванием, складывающимся из запаздывания определения отклонения и передачи сообщения диспетчером, осознания и выполнения команды пилотом, реакции самолета на отклонение рулей. Отсутствие на борту ЛА приборной информации о положении ЛА относительно взлетно-посадочной полосы (ВПП) не позволяет реализовать имеющиеся высокие точности РСП и, тем самым, понизить метеоминимум посадки.
Известна система «Вымпел», которая была разработана и использовалась для посадки Орбитального Корабля «Буран» (ОК).
Радиотехническая система автоматической посадки предназначена для информационного обеспечения автоматического вывода ОК на ось посадочной полосы с высоты 7000 м, снижения по оптимальной траектории, приземления и пробега до полной остановки.
В основу работы азимутального и угломестного радиомаяков положен принцип излучения высокочастотных сигналов при помощи узконаправленных сканирующих антенн. При сканировании антенн в излучаемых сигналах передается информация об угловом положении диаграммы направленности радиомаяка путем изменения временного интервала между кодированными импульсными посылками. В бортовом оборудовании производится измерение периода, соответствующего середине принятой огибающей и определение углового положения ОК. Измерение азимута и угла места происходит последовательно во времени. Угломерное оборудование работает в 2 см диапазоне волн. Погрешность измерения угловых координат (3 сигма) 0,21°. Сектор сканирования азимутального радиомаяка и сектор ретранслятора дальномера в горизонтальной плоскости ±30°. Сектор сканирования угломестного радиомаяка в вертикальной плоскости 0,5÷30°. Дальность действия 25 км [«ЭКСПРЕСС-ОТЧЕТ» www.buran.ru/htm/pk.htm].
К недостаткам этой перспективной системы относится необходимость установки на борту ЛА дополнительного оборудования и ретранслятора дальномера у ВПП.
Известны радиолокационные навигационные системы с активным ответом, в которых происходит переизлучение сигнала ретранслирующим устройством (ответчиком, транспондером), находящимся на объекте, местоположение которого определяется. [Давыдов П.С. (ред.) и др. «Радионавигационные системы летательных аппаратов». Москва, Транспорт. 1980 г., 448 с.].
Недостатком систем с активным ответом, предназначенных для использования при заходе на посадку, является необходимость установки на аэродроме, вблизи ВПП, дополнительного оборудования - радиолокационных ответчиков.
Наиболее близким к заявляемому изобретению является «Способ захода на посадку летательного аппарата и система для его осуществления» автора Александрова В.К. [патент RU 2559196 С1, 21.05.2014]. В указанном способе дальность до ВПП на борту ЛА определяют при взаимодействии бортового и наземного, установленного у торца ВПП, комплектов системы предупреждения столкновений (СПС). По полученной дальности и высоте, получаемой от бортовых высотомеров, с учетом температурной методической поправки формируют и индицируют глиссаду снижения.
Недостатком данного изобретения является необходимость установки дополнительного оборудования, прежде всего комплекта СПС на аэродроме (вблизи торца ВПП), а также предусматривается, ввиду малой точности, использование бортового комплекта СПС для пеленгации источника излучения - наземного комплекта СПС.
Сущность изобретения.
Задачей изобретения является разработка способа использования существующего наземного и модернизированного, в соответствии с изобретением, самолетного оборудования, обеспечивающего формирование на борту ЛА приборной информации о положении ЛА относительно ВПП при заходе на посадку.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в обеспечении возможности высокоточного определения положения ЛА относительно ВПП, в понижении метеоминимума при заходе на посадку на малооборудованных аэродромах, в комплексном использовании и резервировании других посадочных средств, в повышении безопасности полета и посадки самолетов, особенно в условиях полета по приборам.
Для достижения указанного технического результата в предлагаемом способе определения координат летательного аппарата относительно взлетно-посадочной полосы, включающем радиоизлучение с наземного пункта, измерение курсовых углов наземного источника радиоизлучения, во время захода на посадку ЛА, с помощью бортовой радиолокационной станции (БРЛС) производят пеленгацию источника излучения (измерение курсового угла и угла места) - наземной радиолокационной системы посадки (РСП) или БРЛС другого ЛА с известными координатами, стоящего на земле. В полученном таким образом направлении производят измерение дальности путем излучения с борта ЛА запросного сигнала и приема отраженного от антенны РСП или антенны БРЛС стоящего на земле ЛА ответного сигнала, отличающегося от запросного сигнала наземного источника радиоизлучения несущей частотой (и/или поляризацией). По измеренным таким образом двум углам и дальности, известному курсу полета, курсу посадки и известному расположению наземного источника излучения относительно ВПП определяют положение ЛА относительно ВПП, т.е. относительную высоту полета Н, боковое уклонение Z, горизонтальную дальность до ВПП X.
При этом сигнал пеленгуемого РСП или БРЛС стоящего на земле ЛА содержит информацию о направлении излучения и времени излучения сигнала.
Кроме того, измерения дальности производят методом активной радиолокации, при котором запросным является сигнал БРЛС заходящего на посадку ЛА, а РСП или БРЛС другого ЛА, стоящего на земле, излучает ответный сигнал.
Предлагаемая посадочная система иллюстрируется чертежами, представленными на фиг. 1 - вид сверху, на фиг. 2 - вид сбоку.
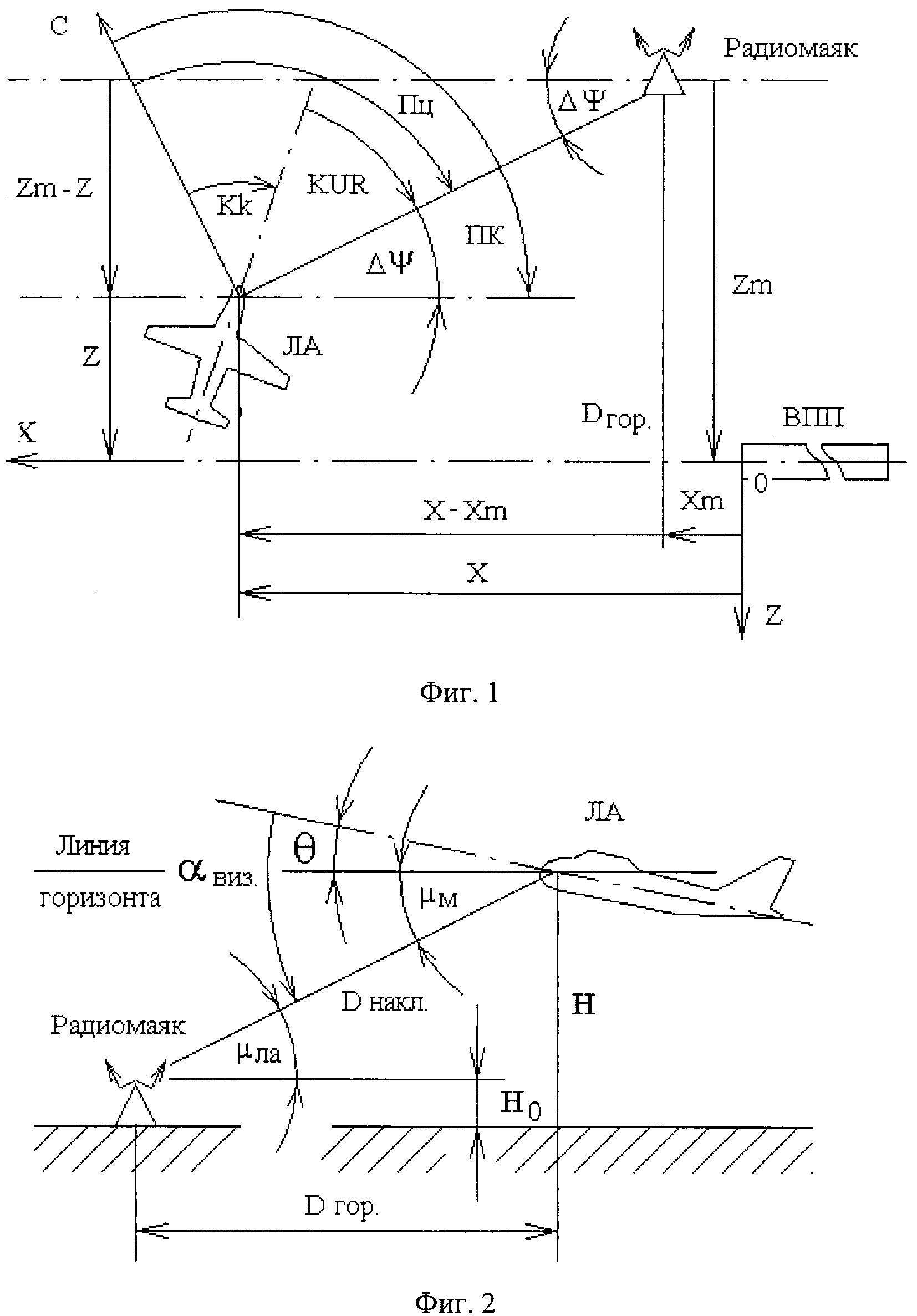
На фиг. 1 показана схема определения места ЛА относительно ВПП (вид сверху), где:
С - направление на север (истинный или магнитный);
Kk - курс полета;
KUR - курсовой угол радиостанции (цели);
Пц - пеленг цели;
Δψ - угол между курсом посадки и пеленгом цели;
Dгор - горизонтальная дальность до радиомаяка;
Z - боковое уклонение ЛА от оси ВПП;
Z0 - боковое уклонение радиомаяка от оси ВПП;
ПК - курс посадки.
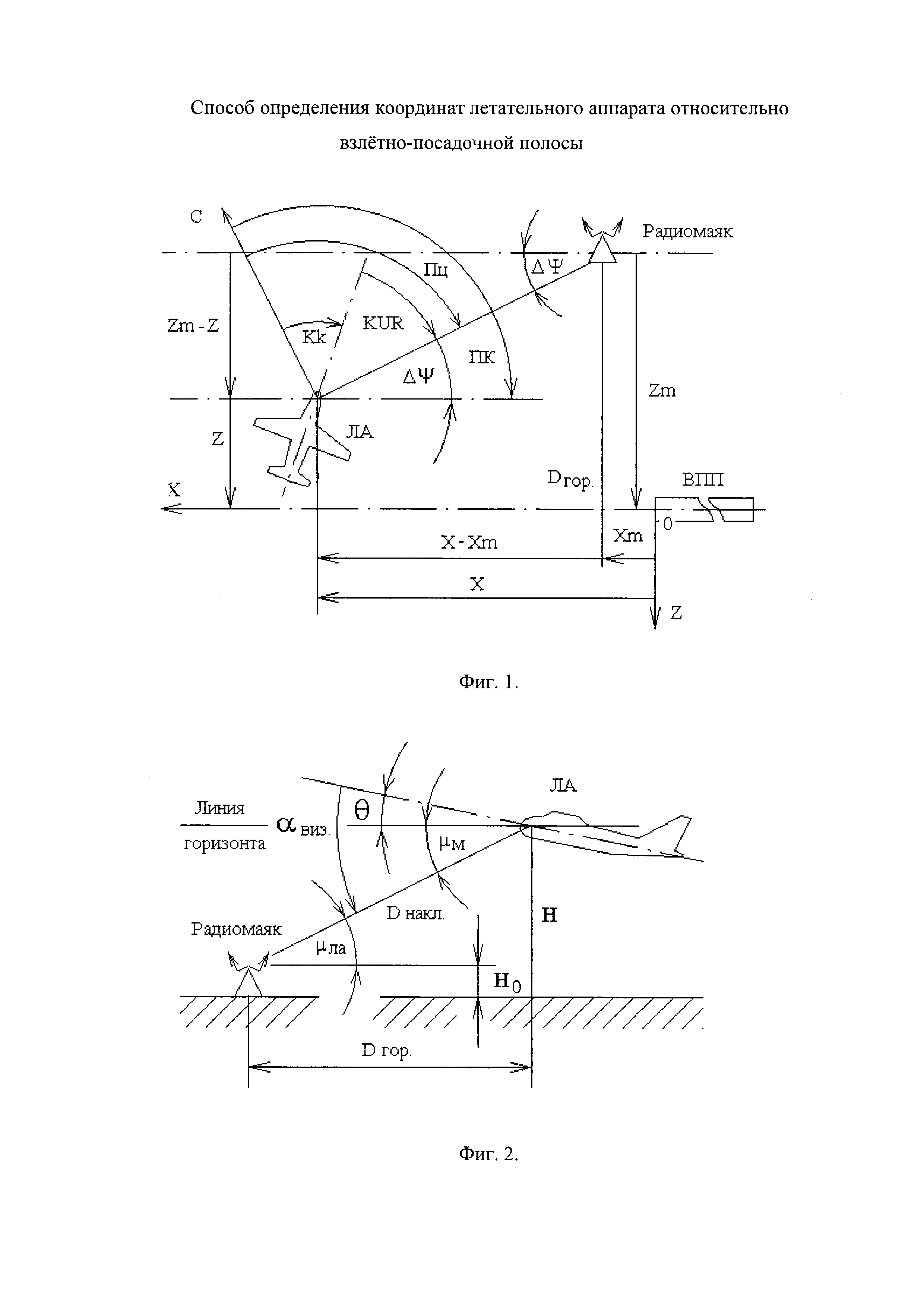
На фиг. 2 показана схема определения относительной высоты полета, где:
αвиз - угол визирования радиомаяка;
θ - угол тангажа;
μм - угол места радиомаяка;
μла - угол места ЛА;
Dнакл - наклонная дальность (измеряет БРЛС);
Н0 - высота радиомаяка относительно ВПП;
Н - относительная высота полета.
Предлагаемый способ осуществляют в следующей последовательности.
С наземного пункта (сканирующими в вертикальной и горизонтальной плоскости антеннами радиолокационной системы посадки - РСП или антенной БРЛС другого самолета, стоящего на земле, с известными координатами относительно ВПП) производят излучение высокочастотных сигналов. Во время захода на посадку ЛА с помощью бортовой радиолокационной станции (БРЛС) производят пеленгацию источника радиоизлучения (измерение курсового угла KUR и угла места, μм) радиолокационной системы посадки (РСП) или БРЛС другого ЛА, стоящего на земле.
Пеленгуют сигналы указанных антенн, в результате чего на борту ЛА получают курсовой угол и угол места цели (наземной антенны). Пеленгование источника излучения возможно как по основному лучу, так и по боковым лепесткам.
Для измерения дальности БРЛС периодически излучает запросный сигнал в определенном, как указано выше, направлении в сторону наземной антенны (антенн РСП, БРЛС другого, стоящего на земле ЛА) на частоте, отличающейся от частоты наземной станции. Запросный сигнал также может отличаться от сигнала наземного источника радиоизлучения поляризацией. Для устранения влияния отражений от земли используют методы моноимпульсной радиолокации, т.е. измерения производятся в направлении минимума принимаемого сигнала разностной диаграммы направленности.
При необходимости, для получения наибольшей амплитуды отраженного от цели (антенны наземного РСП или БРЛС) сигнала, измерение дальности до источника излучения производят в момент, когда антенна направлена на ЛА. С этой целью на борту ЛА определяют максимум амплитуды запросного сигнала, и измеренное в этот момент направление на наземный излучатель считают направлением наземной антенны на ЛА. В этот момент (в течение короткого времени) и производят измерение дальности методом „запрос - ответ”.
Измерения дальности производят также методом активной радиолокации, при котором запросным является сигнал БРЛС, а наземный (БРЛС другого ЛА, стоящего на земле, или РСП) излучает ответный сигнал.
Получив место ЛА относительно РСП или БРЛС в виде 2-х углов и дальности, зная курс полета, курс посадки (ПК) и расположение РСП или наземной БРЛС относительно ВПП, используя схемы, приведенные на фиг. 1 и 2, получают относительную высоту полета Н, боковое уклонение Z и горизонтальную дальность до ВПП X следующим образом.
Из фиг. 1: 

Здесь 
Из фиг. 2: 
Подставив (3 и 4) в (1 и 2), окончательно получим:


Из фиг. 2:

Здесь 
Подставив (8) в (7), окончательно получим:

Полученное значение относительной высоты используют для сравнения с показаниями бортового высотомера с целью избежания грубых ошибок выставки давления аэродрома в окне Колсмана. Это значение может быть также использовано в случае отказа системы воздушных сигналов, вместо (или для дублирования и совместной обработки) сигнала радиовысотомера.
Полученное значение бокового уклонения Z используют для индикации и в системах автоматического и директорного управления. Полученное по формуле (9) значение относительной высоты Н сравнивают с заданной высотой (путем вычитания заданной высоты из текущей, определенной по формуле (9), высоты, и полученную разность ΔН используют для индикации и в системах автоматического и директорного управления.
Заданную высоту определяют по формуле:

где ΔХ - расстояние от торца ВПП до линии пересечения плоскости глиссады с поверхностью земли;
УНТ - угол наклона глиссады;
X - расстояние до торца ВПП, определенное по формуле (2).
Полученное значение Нзад выдают экипажу на индикацию.
Глиссада снижения может строиться также по полученной информации о дальности до ВПП и высоте полета по способу, изложенному в патенте RU 2559196 С1, 21.05.2014.
Если сигнал пеленгуемого наземного излучателя содержит информацию о направлении излучения, то эта информация используется для сравнения и совместной обработки с данными, полученными с помощью БРЛС заходящего на посадку ЛА, для увеличения точности и повышения достоверности получаемых координат.
Информация о времени излучения сигнала наземным излучателем используется на борту ЛА для определения дальности по методике, аналогичной той, которая используется в спутниковых навигационных системах. Полученная таким образом дальность используется для сравнения и совместной обработки с дальностью, полученной с помощью БРЛС.
Если в сигналах наземного БРЛС другого ЛА, стоящего на земле, курсовой и глиссадной антенн РСП содержится информация о направлении излучения, то она используется для совместной обработки на борту ЛА.
Измерения дальности производят также методом активной радиолокации, при котором запросным является сигнал БРЛС, а наземный (БРЛС другого ЛА или РСП) излучает ответный сигнал.
Способ захода на посадку летательного аппарата и система для его осуществления
Способ определения аэродинамического нагрева высокоскоростного летательного аппарата в опережающих лётных исследованиях на крупномасштабной модели
Способ определения положения летательного аппарата относительно взлётно-посадочной полосы при посадке и система для его осуществления
Наземное подвижное средство посадки (нпсп) беспилотного летательного аппарата (бла) и способ посадки бла на нпсп
Способ измерения удара на конструкции крепления бортового оборудования летательного аппарата при наличии в измеряемом процессе вибрационных и ударных нагрузок
Способ определения содержания частиц сажи в выхлопной струе авиационного газотурбинного двигателя в полёте
Способ формирования управляющего сигнала по углу крена модели гиперзвукового летательного аппарата (гла) для контроля аэродинамической идентичности по числам рейнольдса траекторий полёта модели и натурного изделия при проведении опережающих лётных исследований аэродинамических характеристик
Устройство для преобразования изменения сопротивления в напряжение
Способ определения функционального состояния пилота и система для его осуществления
Способ оценки средних за полёт концентраций токсичных примесей в воздухе гермокабин летательных аппаратов и в воздухе, поступающем от компрессоров газотурбинных двигателей, и устройство для его осуществления
Способ захода на посадку летательного аппарата и система для его осуществления
Способ определения аэродинамического нагрева высокоскоростного летательного аппарата в опережающих лётных исследованиях на крупномасштабной модели
Способ определения положения летательного аппарата относительно взлётно-посадочной полосы при посадке и система для его осуществления
Устройство для отбора проб воздуха от авиационных газотурбинных двигателей при проведении испытаний на летающих лабораториях
Наземное подвижное средство посадки (нпсп) беспилотного летательного аппарата (бла) и способ посадки бла на нпсп
Устройство для отбора проб воздуха в мотогондолах авиационных газотурбинных двигателей
Способ измерения азимутальной диаграммы направленности антенны в составе наземных подвижных объектов больших размеров и устройство для его осуществления
Способ измерения удара на конструкции крепления бортового оборудования летательного аппарата при наличии в измеряемом процессе вибрационных и ударных нагрузок
Способ определения содержания частиц сажи в выхлопной струе авиационного газотурбинного двигателя в полёте
Способ управления самолетом с учетом стабилизации заданной скорости полета

