Результат интеллектуальной деятельности: Способ определения положения летательного аппарата относительно взлётно-посадочной полосы при посадке и система для его осуществления
Вид РИД
Изобретение
Изобретения относятся к навигации, а именно, к способам определения положения летательного аппарата (ЛА) относительно взлетно-посадочной полосы (ВПП) и системам их осуществления.
Уровень техники
Известен пеленгационный способ определения положения ЛА, который заключается в излучении с борта ЛА сигнала частотой ƒо, принимаемого на поверхности земли на две антенны пеленгатора, отстоящие друг от друга на расстоянии измерительной базы b и измерении разность фаз ΔΨ принимаемого сигнала. Вследствие разности путей распространения сигнала от антенны бортового радиомаяка до антенн наземного пеленгатора возникает различие во времени его приема, которое при значительном удалении ЛА от измерительной базы пеленгатора на частоте сигнала пропорционально косинусу направляющего угла α между линией измерительной базы и линией визирования ЛА. Величину фазового сдвига принимаемых пеленгатором сигналов определяют по формуле:

где с=3⋅108 м/с - скорость распространения радиосигнала: Бычков С.И., Лукьянов Д.П., Назимов Е.Н., Олянюк П.В., Сергеев Н.К., Шебшаевич B.C., Юрков Ю.А. «Космические радиотехнические комплексы». Сов. радио, 1967; стр. 130-134.
Известно, что при условии полета ЛА по траектории, направленной перпендикулярно линии базы пространственного разнесения двух пеленгаторов и проходящей через центр базы достигают наивысшую точность определения положения ЛА: A.M. Знаменская, В.В. Цыплаков, В.П. Шведов «Метрологическое обеспечение летных исследований. Аппаратура и системы измерений для летных исследований и испытаний» в научно-техническом сборнике «Летные исследования и испытания. Фрагменты истории и современное состояние». Машиностроение, 1993 г., с. 225-227. Рис. 14а «Характеристики точности измерения пеленгационным методом». Система, в которой реализован пеленгационный способ определения положения ЛА, состоит из радиомаяка, установленного на борту ЛА, и двух наземных пеленгаторов, у которых радионавигационные точки (РНТ) положения центров антенных систем отдалены друг от друга на величину базы системы. Бортовой радиомаяк содержит передатчик с антенной, излучающей немодулированный непрерывный сигнал. Каждый пеленгатор в упрощенном виде содержит антенную систему, состоящую из четырех антенн, два двухканальных радиоприемника и два измерителя разности фаз. Антенны каждого пеленгатора установлены в углах квадрата, диагоналями которого являются измерительные базы по осям X и Z пеленгатора. Пара антенн, соответствующая оси X или оси Z пеленгатора подключена к входам своего двухканального приемника, к выходам которого подключен измеритель разности фаз. Таким образом, на земле в двух РНТ расположения антенных систем пеленгаторов принимают сигнал радиомаяка на четыре пары антенн, соответствующих осям X и Z двух пеленгаторов, и измеряют четыре разности фаз. Каждая измеренная разность фаз сигнала пропорциональна направляющему косинусу положения ЛА относительно соответствующей оси X или оси Z соответствующего пеленгатора. Измеряемые четыре направляющие косинуса положения ЛА совместно с величиной базы системы используют для определения положения ЛА в пространстве в прямоугольной системе координат. Недостатком способа является невозможность получения навигационной информации на борту ЛА.
Известно устройство для определения местоположения и углов ориентации ЛА относительно взлетно-посадочной полосы (ВПП), включающее два разнесенных в пространстве одинаковых лазерных маяка с известными координатами, установленных вдоль ВПП на полосах безопасности, обеспечивающих формирование области излучения посадочной траектории, и содержащее на борту ЛА два разнесенных оптико-локационных блока, выполненных в виде объектива и фоточувствительной матрицы и вычислитель, включающий модуль обработки оцифрованного изображения лазерных маяков, модуль вычисления координат маяков, модуль вычисления матрицы направляющих косинусов и модуль вычисления координат ЛА, где путем вычислений определяют координаты двух маяков, углы ориентации ЛА относительно ВПП, матрицу направляющих косинусов, координаты ЛА относительно ВПП: горизонтальную дальность до точки касания, высоту полета, боковое отклонение от оси ВПП: патент на изобретение RU №2378664 С1. Недостатком устройства является его непригодность при посадке ЛА в условиях плохой видимости при тумане, дожде, снегопаде, задымлении.
Известен фазовый разностно-дальномерный способ определения положения ЛА относительно наземного радиомаяка, заключающийся в излучении когерентных сигналов антенной системой радиомаяка, содержащей две антенны, разнесенные друг от друга на расстояние измерительной базы, приеме на борту ЛА излучаемых радиомаяком сигналов, преобразовании их по частоте и измерении их разности фаз, которая пропорциональна разности путей распространения сигналов от антенн радиомаяка до бортовой антенны ЛА, где, для достижения когерентности излучаемых радиомаяком сигналов, сигналы синхронизируют по частоте тем, что устанавливают между частотами их излучения целочисленное соотношение, и согласовывают их по фазе тем, что фазу сигнала гетеродина одного передатчика радиомаяка согласовывают с фазой сигнала гетеродина другого передатчика, при этом измеряемая разность фаз является параметром гиперболоида вращения относительно измерительной базы радиомаяка, ограниченной фокусами в РНТ размещения антенн радиомаяка, где надземная часть поверхности гиперболоида вращения является местом положения ЛА: С.И. Бычков, Д.П. Лукьянов, Е.Н. Назимов, П.В. Олянюк, Н.К. Сергеев, B.C. Шебшаевич, Ю.А. Юрков «Космические радиотехнические комплексы». Сов. радио, 1967 г., с. 125-127. Недостатком способа является гиперболическая кривизна линии положения.
Предлагаемые изобретения направлены на достижение технического результата, заключающегося в возможности определять на борту ЛА его пространственное положение относительно ВПП и отображать экипажу в реальном масштабе времени параметры этого положения, а также в возможности использовать их для автоматизации посадки ЛА.
Для получения указанного технического результата в предлагаемом способе определения положения ЛА относительно ВПП при посадке, включающем излучение когерентных сигналов антенной системой наземного радиомаяка, содержащей антенны, разнесенные друг от друга на расстояние измерительной базы, приеме радиоприемником на борту ЛА сигналов наземного радиомаяка, преобразовании сигналов по частоте и измерении их разности фаз, которая пропорциональна разности путей распространения сигналов от антенн радиомаяка до бортовой антенны ЛА, а ее значение является параметром гиперболоида вращения относительно измерительной базы радиомаяка, надземная часть поверхности которого является местом положения ЛА, антенную систему радиомаяка формируют из двух взаимно ортогональных между собой измерительных баз, в состав которой дополнительно включают общую центральную антенну О, установленную в точке О, а четыре периферийные антенны Вх, Нх и Вz, Hz устанавливают от центральной антенны О на базовых расстояниях bвx, bнх и bвz, bнz соответственно в точках Вх, Нх оси X и в точках Bz, Hz оси Z, которые принадлежат измерительным базам радиомаяка. Когерентность сигналов радиомаяка осуществляют посредством модуляции тональными сигналами частотой Fx и Fz радиосигнала частотой ƒ. Отделяют посредством фильтров друг от друга полученные пять компонент модулированного сигнала, которые направляют на пять одинаковых антенн: на антенны, установленные в точках Вх и Нх, направляют соответственно высокочастотный (на верхней боковой частоте ƒвx=ƒ+Fx) сигнал авх и низкочастотный (на нижней боковой частоте ƒнх=ƒ-Fx) сигнал анх, на антенну, установленную в точке О, направляют опорный (на несущей частоте ƒо=ƒ) сигнал ао, на антенны, установленные в точках Bz и Hz, направляют соответственно высокочастотный (на верхней боковой частоте ƒвz=ƒ+Fz) сигнал авz и низкочастотный (на нижней боковой частоте ƒнz=ƒ-Fz) сигнал анz. Излучаемые антенной системой радиомаяка сигналы принимают антенной бортового радиоприемника ЛА, на борту ЛА сигналы посредством фильтров отделяют друг от друга, одну пару сигналов: высокочастотный на частоте ƒвx и опорный на частоте ƒо преобразовывают в один сигнал на частоте (ƒвх-ƒо) с фазовым сдвигом, содержащим изменяющуюся во времени фазу тонального сигнала (2π⋅Fx⋅t+Фх) и постоянный фазовый сдвиг, пропорциональный разности путей распространения сигналов от антенн радиомаяка до антенны ЛА, другую пару сигналов: опорный на частоте ƒо и низкочастотный на частоте ƒнх преобразовывают в другой сигнал на частоте (ƒo-ƒнx) с подобным фазовым сдвигом. Измеряют разность фаз ΔΨх преобразованных сигналов, которая равна разности разностей фазовых сдвигов пар сигналов авх и ао, ао и анх, полученных ими при распространении от соответствующих антенн радиомаяка до бортовой антенны ЛА, при этом в дальней зоне радиомаяка поверхность гиперболоида местоположения ЛА асимптотически "вырождается" в боковую поверхность конуса вращения, исходящую из радионавигационной точки (РНТ) размещения центральной антенны О, образующая которого является прямой визирования ЛА с углом αх, отсчитываемым от оси X, где надземная часть боковой поверхности конуса вращения является местом положения ЛА, при этом значение направляющего косинуса боковой поверхности конуса определяют по формуле:
cos αх=ΔΨx⋅c/2π⋅(ƒвx⋅bвx-ƒнх⋅bнх),
где с - скорость распространения радиосигнала,
подобным образом формируют и определяют направляющий косинус для оси Z по формуле:
cos αz=ΔΨz⋅c/2π⋅(ƒвz⋅bвz-ƒнz⋅bнz),
При этом пересечение боковых поверхностей конусов местоположения ЛА, определенных направляющими косинусами cos αх и cos αz, является линией визирования ЛА из центра антенной системы радиомаяка. Для определения на борту ЛА его положения в пространстве относительно взлетно-посадочной полосы дополнительно излучают сигналы антенной системой второго радиомаяка, при этом радиомаяки различают между собой частотой радиосигнала ƒo, которая для каждого радиомаяка является его идентификатором, оба радиомаяка устанавливают в районе точки приземления ЛА на взлетно-посадочной полосе по разные стороны от ее оси, симметрично относительно ее оси на базовом удалении друг от друга Б, по результатам определения на борту ЛА четырех направляющих косинусов, формируемых обоими радиомаяками, и знания базового размера системы посадки определяют в системе координат ВПП точку пересечения линий визирования ЛА из центров антенных систем радиомаяков, являющуюся точкой местонахождения ЛА относительно ВПП, затем вычисляют прямоугольные координаты положения ЛА относительно точки приземления ЛА на ВПП, которые преобразовывают в необходимые экипажу навигационные элементы полета ЛА при посадке: боковое отклонение ЛА от оси ВПП, дальность до точки приземления ЛА на ВПП, высоту и скорость полета ЛА, его текущую глиссаду, скорость снижения ЛА, которые отображают в удобной экипажу форме на дисплее ЛА.
Кроме того, для условий применения радиомаяка с углами αх и αz ∈ [0°, 180°], измеряемыми относительно осей X и Z радиомаяка и отсчитываемыми в разностях фаз сигналов ΔΨ∈[π/2, -π/2], при заданной частоте радиосигнала ƒ и частотах тональных сигналов Fx и Fz, а также заданных геометрических размерах баз антенной системы bнх и bнz, геометрические размеры баз bвх и bвz определяют по формулам:
 и
и  .
.
Для достижения названного технического результата в предлагаемой системе для определения положения ЛА относительно ВПП при посадке, содержащей радиомаяки, установленные на аэродроме вблизи ВПП в точках с известными координатами и установленные на борту ЛА блоки регистрации излучений радиомаяков, вычислитель, содержащий модуль вычисления матрицы направляющих косинусов и модуль вычисления координат ЛА, два наземных радиомаяка устанавливают в районе точки приземления ЛА на ВПП по разные стороны от ее оси, симметрично относительно ее оси, на известном базовом расстоянии друг от друга, на борту ЛА устанавливают пеленгатор. Каждый радиомаяк содержит генератор радиосигнала, частота ƒo которого является идентификатором радиомаяка, два генератора тонального сигнала, частоты Fx и Fz которых являются идентификаторами осей X и Z радиомаяка, два модулятора, пять избирательных фильтров, пять усилителей мощности, которые организовывают в каналы формирования сигналов по осям X и Z и канал формирования опорного сигнала, и антенную систему, состоящую из пяти одинаковых антенн Вх, Bz, О, Нх, Hz, из которых антенну О устанавливают в центре антенной системы, а антенны Вх, Вz, Нх, Нz устанавливают по периферии относительно антенны О так, что линия размещения антенн Вх, О, Нх ортогональна линии размещения антенн Bz, О, Hz, при этом антенны Вх и Нх отстоят от антенны О на расстояниях bвх, bнх измерительной базы ВxНx, антенны Bz и Hz отстоят от антенны О на расстояниях bвz, bнz измерительной базы BzHz, где каждой измерительной базе принадлежит базисный вектор, определяющий направление оси X или оси Z радиомаяка, относительно которого производят измерение углового положения ЛА. При этом входы модуляторов соединяют с выходом генератора радиосигнала и с выходами генераторов тональных сигналов, где для отделения друг от друга компонент модулированных сигналов выходы модуляторов соединяют с входами избирательных фильтров: высокочастотных (на верхних боковых частотах ƒвх, ƒвz) сигналов и низкочастотных (на нижних боковых частотах ƒнx, ƒнz) сигналов осей X и Z, а вход избирательного фильтра опорного (на несущей частоте ƒo) сигнала соединяют с выходом генератора радиосигнала, где выходы избирательных фильтров соединяют с входами усилителей мощности, выходы которых соединяют с антеннами Нх, Нz, О, Вх, Bz. Оба радиомаяка излучением их антенных систем связывают с антенной радиоприемника бортового пеленгатора ЛА. Бортовой пеленгатор ЛА содержит радиоприемник сигналов радиомаяков, десять полосовых избирательных фильтров, восемь преобразователей частоты, восемь фильтров разностной частоты, четыре измерителя разности фаз, которые организовывают по принадлежности радиомаяков в два тракта, каждый из которых организовывают в каналы формирования сигналов по осям X и Z и канал формирования опорного сигнала, где при формировании сигналов по осям X и Z канал опорного сигнала является общим, и вычислитель с дисплеем. При этом выход радиоприемника бортового пеленгатора в каждом тракте соединяют с входами избирательных фильтров опорного (на несущей частоте ƒo) сигнала, двух высокочастотных (на верхних боковых частотах ƒвх и ƒвz) сигналов и двух низкочастотных (на нижних боковых частотах ƒнх и ƒнz) сигналов по принадлежности каналам формирования сигналов по оси X и по оси Z радиомаяка. При этом в канале формирования сигналов по оси X выход высокочастотного и низкочастотного избирательных фильтров вместе с выходом избирательного фильтра опорного сигнала попарно подключают к входу преобразователя частоты для преобразования сигналов: высокочастотного на частоте ƒвх и опорного на частоте ƒo в один сигнал с фазовым сдвигом на частоте (ƒвх-ƒо), опорного на частоте ƒo и низкочастотного на частоте ƒнх в другой сигнал с фазовым сдвигом на частоте (ƒo-ƒнх), где выходы преобразователей частоты через фильтры разностной частоты подключают к входам измерителя разности фаз, выход которого связывают с входом вычислителя. Подобным образом в канале формирования сигналов по оси Z формируют сигналы на частотах (ƒвz-ƒo) и (ƒo-ƒнz), которые подают через фильтры разностной частоты на входы измерителя разности фаз, выход которого связывают со вторым входом вычислителя. Аналогично устраивают и подключают к вычислителю второй тракт бортового пеленгатора.
В вычислителе по результатам определения на борту ЛА четырех направляющих косинусов, формируемых обоими радиомаяками, и знании величины базового расстояния между радиомаяками, вычисляют прямоугольные координаты положения ЛА относительно точки приземления ЛА на ВПП и определяют пространственное положение ЛА относительно ВПП, отображают на дисплее в реальном масштабе времени экипажу боковое отклонение ЛА от оси ВПП, дальность до точки приземления ЛА на ВПП, высоту и скорость полета ЛА, его текущую глиссаду, скорость снижения ЛА.
Предлагаемые изобретения иллюстрированы чертежами, на которых изображены:
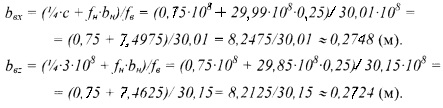
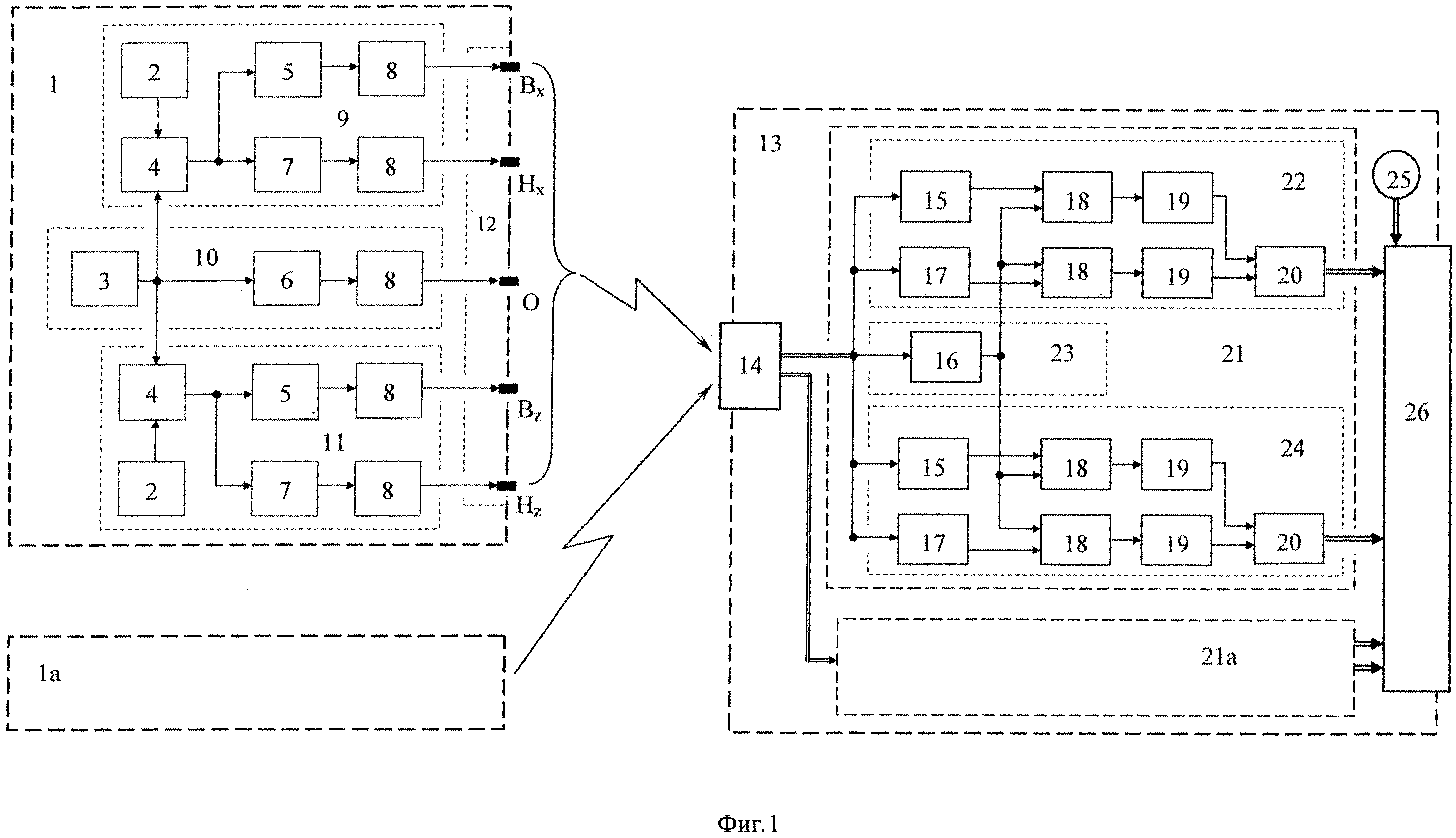
на фиг. 1 функциональная блок-схема устройства системы посадки, где:
1, 1а - первый и второй наземные радиомаяки;
2 - генератор тонального сигнала;
3 - генератор радиосигнала;
4 - модулятор;
5 - избирательный фильтр высокочастотного сигнала (на верхней боковой частоте);
6 - избирательный фильтр опорного сигнала (на несущей частоте):
7 - избирательный фильтр низкочастотного сигнала (на нижней боковой частоте);
8 - усилитель мощности;
9 - канал формирования сигналов по оси X;
10 - канал формирования опорного сигнала;
11 - канал формирования сигналов по оси Z;
12 - антенная система радиомаяка с антеннами Вх, Вz, О, Нх, Hz;
13 - бортовой пеленгатор;
14 - радиоприемник;
15 - избирательный фильтр высокочастотного сигнала (на верхней боковой частоте);
16 - избирательный фильтр опорного сигнала (на несущей частоте);
17 - избирательный фильтр низкочастотного сигнала (на нижней боковой частоте);
18 - преобразователь частоты сигнала;
19 - фильтр разностной частоты;
20 - измеритель разности фаз;
21, 21а - тракты формирования измерений по сигналам первого и второго радиомаяков;
22 - канал формирования сигналов по оси X;
23 - канал формирования опорного сигнала;
24 - канал формирования сигналов по оси Z;
25 - сведения о размере базы системы;
26 - вычислитель с дисплеем.
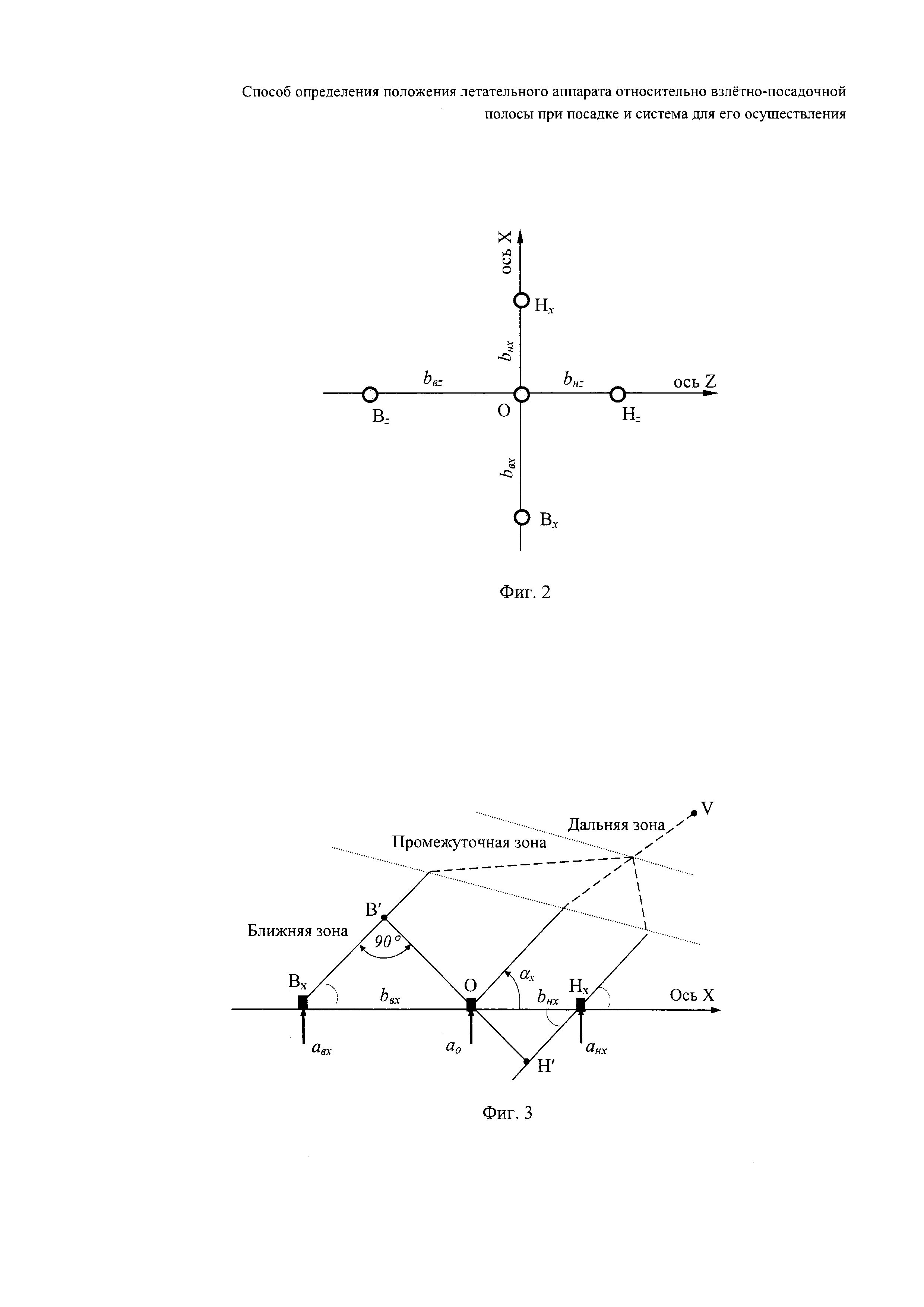
на фиг. 2 схема устройства антенной системы радиомаяка (вид сверху).
на фиг. 3 схема формирования фазовых сдвигов сигналов антеннами оси X радиомаяка и измерения их на борту ЛА.
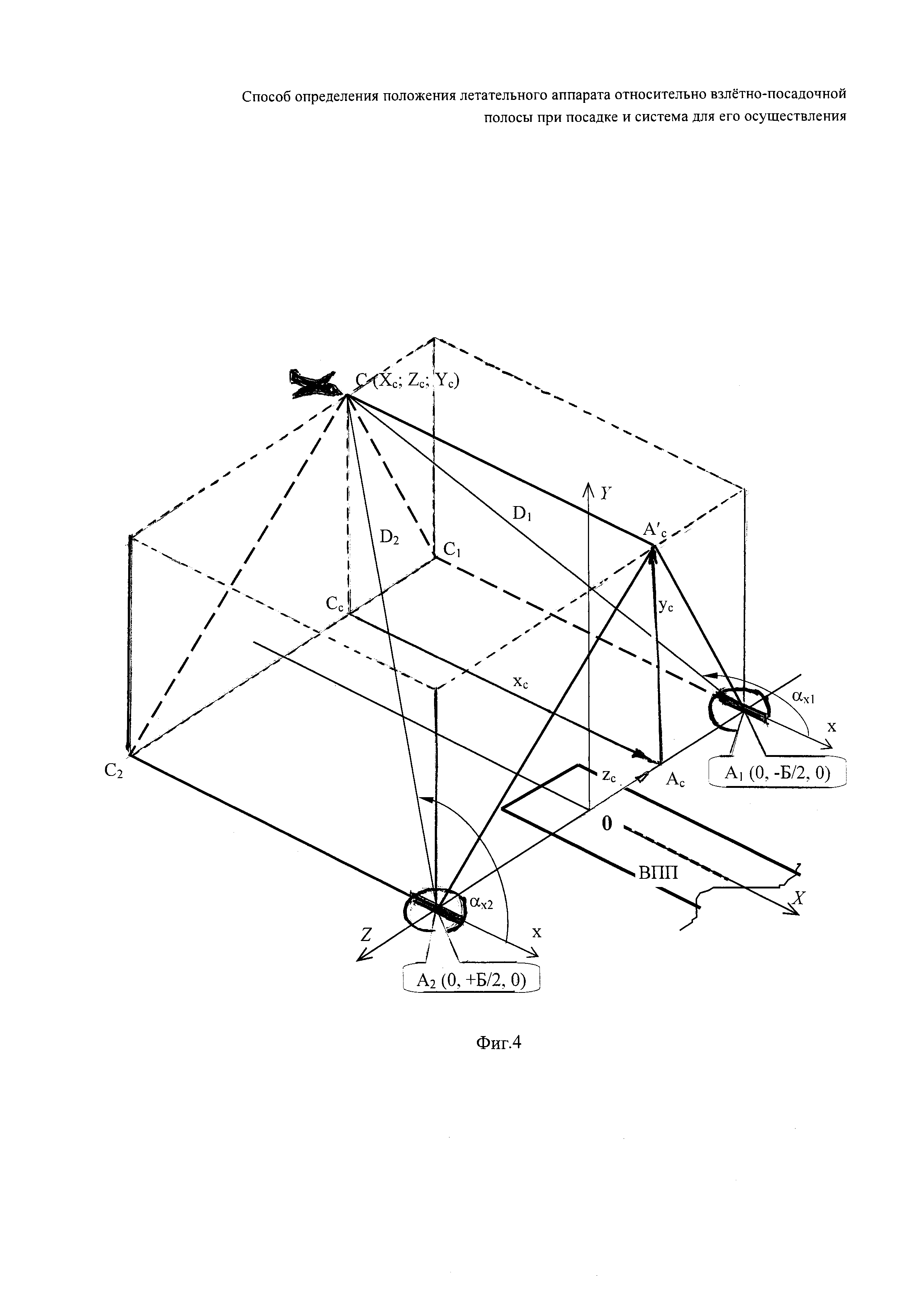
на фиг. 4 геометрия взаимосвязи навигационных параметров системы посадки: Б, αx1, αх2 с прямоугольными координатами Хс, Zc, Yc положения ЛА относительно ВПП.
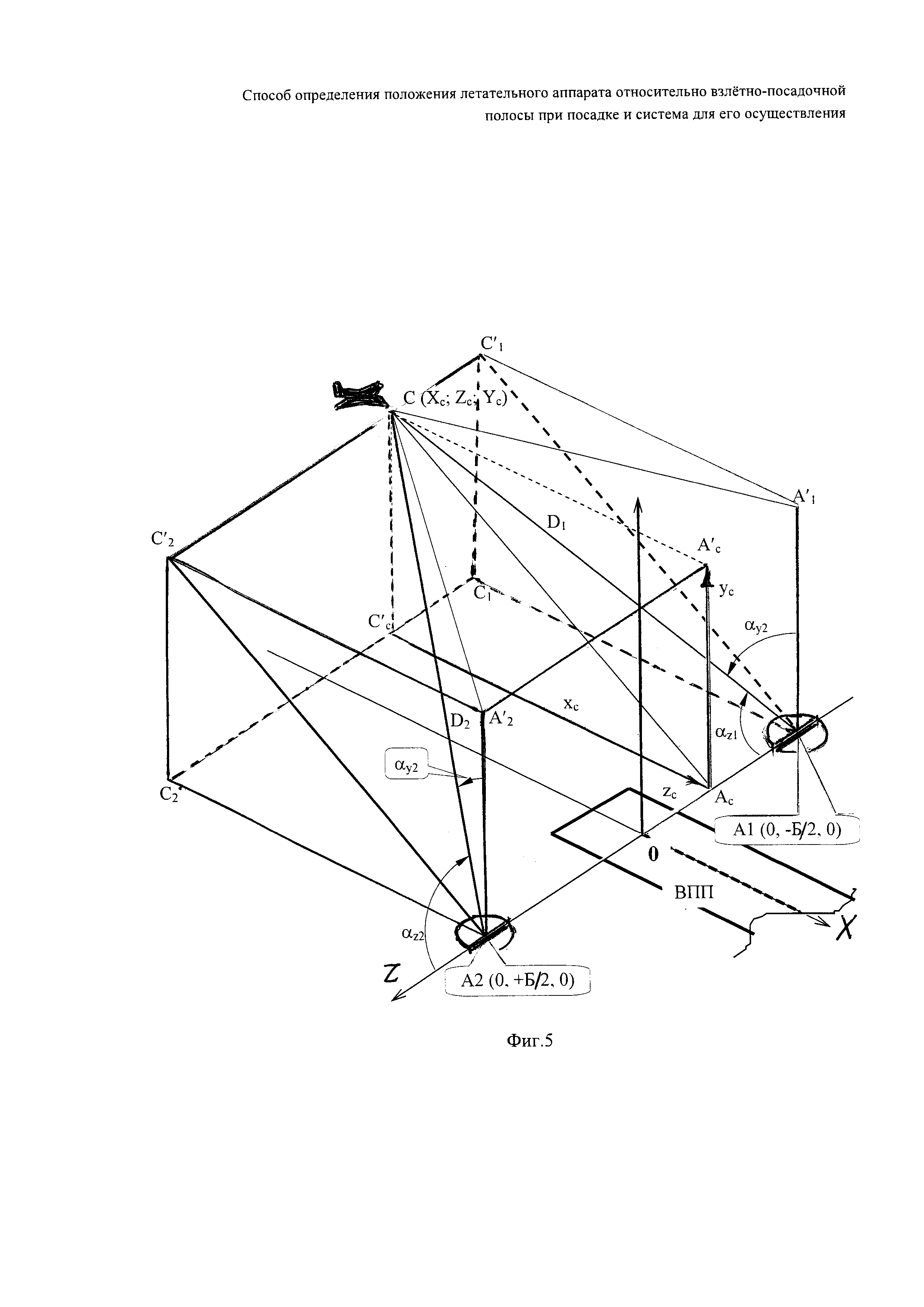
на фиг. 5 геометрия взаимосвязи навигационных параметров системы посадки: Б, αz1, αz2 с прямоугольными координатами Хс, Zc, Yc положения ЛА относительно ВПП.
Предлагаемая система для определения положения ЛА относительно ВПП при посадке содержит (фиг. 1) два наземных радиомаяка 1, 1а и бортовой пеленгатор 13, установленный на борту ЛА. Каждый радиомаяк 1, 1а содержит генератор радиосигнала 3, частота ƒo которого является идентификатором радиомаяка, два генератора тонального сигнала 2, частоты Fx и Fz которых являются идентификаторами осей X и Z радиомаяка, два модулятора 4, пять избирательных фильтров: избирательный фильтр 5 высокочастотного сигнала (на верхней боковой частоте), избирательный фильтр 6 опорного сигнала (на несущей частоте), избирательный фильтр 7 низкочастотного сигнала (на нижней боковой частоте), пять усилителей мощности 8, которые организовывают в канал 9 формирования сигналов по оси X, канал 10 формирования опорного сигнала, канал 11 формирования сигналов по оси Z и антенную систему 12. Антенная система каждого радиомаяка 12 содержит пять одинаковых антенн Вх, Нх, О, Bz, Hz, из которых антенну О устанавливают в центре антенной системы, а антенны Вх, Нх и Bz, Hz устанавливают по периферии относительно антенны О так, что линия размещения антенн Вх, О, Нх и линия размещения антенн Вz, О, Hz взаимно ортогональны друг другу, являются осями X и Z радиомаяка, где каждой измерительной базе ВxНx и BzHz принадлежит свой базисный вектор, определяющий направление оси X или оси Z радиомаяка, относительно которой измеряют угловое положение ЛА, где периферийные антенны удалены от центральной антенны на расстояния bвх, bнх и bвz, bнz (фиг. 2). составляющие измерительные базы радиомаяка. Входы модулятора 4 соединяют с выходом генератора радиосигнала 3 и с выходом генератора тонального сигнала 2. Для отделения компонент модулированного сигнала друг от друга, полученных на выходе модуляторов, выход модулятора 4 в каждом канале 9 и 11 соединяют с входами избирательных фильтров: высокочастотных 5 (на верхней боковой частоте ƒвx, ƒвz) сигналов и низкочастотных 7 (на нижней боковой частоте ƒнх, ƒнz) сигналов, а вход избирательного фильтра опорного 6 (на несущей частоте ƒo) сигнала соединяют с выходом генератора радиосигнала 3. Каждый выход избирательных фильтров 5, 6, 7 соединяют через усилители мощности 8 с входами передающей антенной системы радиомаяка. Излучения двух радиомаяков 1, 1а принимают антенной радиоприемника 14, установленного на борту ЛА. Бортовой пеленгатор 13 содержит радиоприемник 14 с антенной и два тракта формирования измерений 21 и 21а по сигналам радиомаяков, в каждом тракте устанавливают пять полосовых избирательных фильтров по принадлежности сигналам, излучаемых антеннами, размещенными по осям X и Z радиомаяка: два избирательных фильтра 15 высокочастотного сигнала (на верхней боковой частоте), два избирательных фильтра 17 низкочастотного сигнала (на нижней боковой частоте), избирательный фильтр 16 опорного сигнала (на несущей частоте), четыре преобразователя частоты 18, четыре фильтра разностной частоты 19, два измерителя разности фаз 20, где содержимое каждого тракта организовывают в канал 22 формирования сигналов по оси X, канал 23 формирования опорного сигнала, канал 24 формирования сигналов по оси Z. В каждом тракте выходы радиоприемника 14 бортового пеленгатора 13 подключают к входам избирательных фильтров: опорного 16 (на несущей частоте ƒo) сигнала, двух высокочастотных 15 (на верхней боковой частоте ƒвx, ƒвz) сигналов и двух низкочастотных 17 (на нижней боковой частоте ƒнх, ƒнz) сигналов по принадлежности каналам 22 и 24 формирования сигналов по осям X и Z радиомаяка. В каждом канале формирования сигналов по оси X или по оси Z выходы высокочастотного 15 и низкочастотного 17 избирательных фильтров вместе с выходами избирательного фильтра 16 опорного сигнала попарно подключают к входам преобразователей частоты 18 для преобразования по частоте сигналов: высокочастотного и опорного в один сигнал с фазовым сдвигом на частоте (ƒвx-ƒo) или (ƒвz-ƒo), опорного и низкочастотного в другой сигнал с фазовым сдвигом на частоте (ƒo-ƒнх) или (ƒо-ƒнz). Выходы преобразователей частоты 18 через фильтры разностной частоты 19 соединяют с входами измерителя разности фаз 20 в каналах X и Z. выход каждого из которых в каждом тракте соединяют с входом вычислителя с дисплеем 26, где по результатам измерения на борту ЛА четырех направляющих косинусов и знание величины базового расстояния между двумя радиомаяками, вычисляют прямоугольные координаты положения ЛА относительно точки приземления ЛА на ВПП, которые преобразовывают в навигационные элементы полета ЛА: боковое отклонение ЛА от оси ВПП, дальность до точки приземления ЛА на ВПП, высоту и скорость полета ЛА, его текущую глиссаду, скорость снижения ЛА, отображаемые на экране дисплея в удобной экипажу форме или используемые для автоматической посадки ЛА.
Предлагаемый способ осуществляют в следующей последовательности.
На входы (фиг. 1) модулятора 4 радиомаяка 1 подают: с генератора 2 тональный сигнал sx=Sx⋅cos(Ωx⋅t+Фх), с генератора 3 подают радиосигнал а=A⋅cos(ω⋅t+ϕ), сигналы нормированы по амплитуде: Sx=А=1. При использовании амплитудной модуляции выходной сигнал модулятора ах=[1+cos(Ωx⋅t+Фх)]⋅cos(ω⋅t+ϕ) является суммой трех компонент:
компоненты на верхней боковой частоте  ;
;
компоненты на несущей частоте аo=cos(ω⋅t+ϕ):
компоненты на нижней боковой частоте  .
.
Подобный спектр имеют частотно- и фазово-модулированные сигналы при индексе модуляции значительно менее единицы. Поэтому в решаемой технической задаче способ модуляции не имеет значения. Из сравнения фаз компонент на верхней боковой частоте и на несущей частоте следует, что их разность [(ω⋅t+ϕ)+(Ωx⋅t+Фх)]-(ω⋅t+ϕ) равна фазе тонального сигнала (Ωx⋅t+Фx). Из аналогичного сравнения фаз компонент на несущей частоте и на нижней боковой частоте (ω⋅t+ϕ)-[(ω⋅t+ϕ)-(Ωx⋅t+Фх)] также следует равенство (Ωx⋅t+Фх). Равенство разностей фаз сопоставленных пар компонент означает их когерентность и, как следствие, возможность использования их в качестве носителя навигационного параметра. Для придания каждой из этих разностей пар компонент первичного навигационного параметра необходимо излучение компонент осуществлять пространственно разнесенными антеннами. Тогда, в результате сравнения на борту ЛА разности фаз пар компонент, можно будет измерить значение навигационного параметра положение ЛА относительно базы пространственного разнесения антенн.
Компоненты модулированного сигнала на выходе модулятора 4 присутствуют совместно. Для раздельного использования их сигналы с выхода модулятора 4 и генератора радиосигнала 3 подают на входы трех избирательных фильтров 5, 6, 7. на выходе которых получают три независимые друг от друга сигнала:
на выходе фильтра 5 - высокочастотный (на верхней боковой частоте) сигнал
а вх=cos(ωвx⋅t+ϕвх);
на выходе фильтра 6 - опорный (на несущей частоте) сигнал ао=cos(ωо⋅t+ϕо);
на выходе фильтра 7 - низкочастотный (на нижней боковой частоте) сигнал
а нх=cos(ωнх⋅t+ϕнх);
где 
Сигналы с выхода фильтров 5, 6, 7 подают на входы усилителей мощности 8, с выхода которых подают на три антенны Вх, О, Нх антенной системы радиомаяка 12. Антенны Вх и Нх (фиг. 3) расположены на одной линии с антенной О по разные стороны от нее на удалении  ,
,  . Опорный сигнал излучают антенной О, высокочастотный и низкочастотный сигналы, соответственно - антеннами Вх и Нх.
. Опорный сигнал излучают антенной О, высокочастотный и низкочастотный сигналы, соответственно - антеннами Вх и Нх.
Излучаемые антеннами Вх, О, Нх сигналы авх, ао, анх принимают антенной радиоприемника 14 бортового пеленгатора 13, установленного на ЛА, антенна которого находится в точке V (фиг. 3). При распространении по путям BхV, OV, HхV сигналы авх, ао, анх приобретают индивидуальные фазовые сдвиги θвх, θо, θнх. Точка V (фиг. 3) находится в дальней зоне относительно антенной системы радиомаяка, выбрана в пространстве произвольно и отстоит от антенн Вх, О, Нх на расстояниях Dвx, Dо, Dнх. Лучи, исходящие от антенн Нх, О, Вх по направлению к точке V, как и по любому другому направлению в дальнюю зону, между собой квазипараллельны.
Квазипараллельность есть абстрагированный подход к рассмотрению пучка прямых линий, которые как бы с одной стороны параллельны между собой, а с другой стороны принадлежат одной прямой линии. Этот подход был применен при разработке идеи фазового пеленгатора и стал уже классическим.
Согласно этому подходу лучи BхV, OV, HхV образуют параллельный пучок прямых линий, исходящих из точек месторасположения антенн Вх, О, Нх и одновременно принадлежат прямой, которой принадлежит точка V. Если любую прямую данного пучка пересечь прямой, перпендикулярной к ней, то эта прямая также окажется перпендикулярной к остальным прямым пучка. Следовательно, отрезки квазипараллельных прямых пучка, ограниченные, с одной стороны точкой свой принадлежности точке V, а с другой стороны прямой, перпендикулярно пересекающей их, окажутся равными [по длине].
Пересечение пучка прямых линий перпендикулярной к нему прямой можно совершить на любом достаточно большом удалении от точки V. Для удобства решения задачи пересечение пучка прямых BхV, OV, HхV перпендикулярной прямой В'Н' проводят через точку местонахождения антенны О (фиг. 3).
Из приведенного пояснения смысла квазипараллельности следует, что расстояния B'V, OV, H'V (фиг. 3) равны между собой.
Если обозначить:  , тогда:
, тогда: 
Линия базы BхHх антенной системы радиомаяка является отрезком прямой, пересекающей пучок прямых HхV, OV, BхV под углом αх между линией визирования точки V и линией базы ВхНх, принадлежащей оси X радиомаяка. Следовательно, углы Вх, Нх, смежные с углом О равным αх, также равны αх (углы, равные между собой, обозначены дугой на фиг. 3).
Сигнал авх преодолевает расстояние  (фиг. 3). При этом
(фиг. 3). При этом  .
.
Согласно выражению (3)  . Следовательно
. Следовательно  .
.
 . Следовательно Dвx=Dо+bвx⋅cos αх.
. Следовательно Dвx=Dо+bвx⋅cos αх.
Сигнал анх преодолевает расстояние  (фиг. 3). При этом
(фиг. 3). При этом  .
.
Согласно выражению (3)  . Следовательно
. Следовательно  .
.
 . Следовательно Dнх=Dо-bнх cos αx.
. Следовательно Dнх=Dо-bнх cos αx.
Расстояния Dвх, Dо, Dнх сигналы авх, aо, анх преодолевают со скоростью распространения радиосигнала в пространстве с≈3⋅108 м/с за время Твх, То, Тнх, соответственно, запаздывание по времени приема сигналов авх, ао, анх в точке V составит:

Значит, индивидуальные фазовые сдвиги принимаемых сигналов равны:

Таким образом, математическое выражение совокупности сигналов, принимаемых бортовой антенной ЛА, имеет вид:

Сигналы (6) с выхода радиоприемника 14 подают на входы фильтров 15, 16, 17, которыми разделяют на: высокочастотный сигнал авх, опорный сигнал ао, низкочастотный сигнал анх. С выхода фильтров 15, 16, 17 эти сигналы попарно подают на входы двух преобразователей частоты сигнала 18, соответственно: авх и ао, ао и анх.
Продуктом преобразования сигналов авх и ао преобразователем частоты сигнала 18 является ансамбль компонент, производимых из данных сигналов, одна из компонент которого имеет их разностную частоту (ωвх-ωо). Для извлечения данной компоненты и подавления прочих компонент продукт преобразования с выхода преобразователя частоты сигнала 18 подают на вход фильтра разностной частоты 19, на выходе которого получают сигнал авхо(ωвх-ωо) на разностной частоте:

С учетом обозначений (2) и (5) сигнал авхо(ωвх-ωо) примет вид:

где фаза сигнала авхо(ωвх-ωo) содержит изменяющуюся во времени фазу тонального сигнала (Ωx⋅t+Фх) и индивидуальный постоянный фазовый сдвиг (θвх-θo), равный разности фазовых сдвигов сигналов авх и аo, приобретаемых ими при распространении от соответствующих антенн радиомаяка до бортовой антенны ЛА.
Продуктом преобразования сигналов аo и анх преобразователем частоты сигнала 18 является ансамбль компонент, производимых из данных сигналов, одна из компонент которого имеет их разностную частоту (ωo-ωнх). Для извлечения данной компоненты и подавления прочих компонент продукт преобразования с выхода преобразователя частоты сигнала 18 подают на вход фильтра разностной частоты 19. на выходе которого получают сигнал аонх(ωо-ωнх) на разностной частоте:

С учетом обозначений (2) и (5) сигнал аонх(ωо-ωнх) примет вид:

где фаза сигнала аонх(ωо-ωнх) содержит изменяющуюся во времени фазу тонального сигнала (Ωх⋅t+Фх) и индивидуальный постоянный фазовый сдвиг (θo-θнх), равный разности фазовых сдвигов сигналов аo и анх, приобретаемых ими при распространении от соответствующих антенн радиомаяка до бортовой антенны ЛА.
Из сравнения фаз сигналов авхо(ωвх-ωo) и аонх(ωо-ωнх), обозначенных (8) и (10) следует, что. во-первых, оба сигнала имеют общую переменную часть фазы, равную (Ωx⋅t+Фх) - чем обнаруживают свою когерентность, и, во-вторых, каждый из этих сигналов имеет особенную постоянную часть фазы, равную разности фазовых сдвигов сигналов, от которых он произошел.
Сигналы авхо(ωвх-ωо) и аонх(ωо-ωнх), приведенные в (8) и (10), с выхода фильтров 19 подают для сравнения по фазе на вход измерителя разности фаз 20. Измеряемая разность фаз ΔΨх этих сигналов равна:

разность фаз ΔΨх сигналов авхо(ωвх-ωо) и аонх(ωо-ωнх) равна разности разностей фазовых сдвигов пар сигналов авх и ао, ао и анх, полученных ими при распространении от соответствующих антенн радиомаяка до бортовой антенны ЛА.
Если в выражение (11) подставляют определения для θвх, θо, θнх, приведенные в (4) и (5), то в результате получают:


Если обозначения, данные в выражении (2): ωо=ω, ωвх=ω+Ωx, ωнх=ω-Ωх, подставляют в выражение (12), то выражение (12) приводят к виду:

Из сопоставления выражения (13) с выражением (1): ΔΨ=2π⋅с-1⋅ƒо⋅b⋅cos α следует их тождественность. Для всяких значений ƒвx, ƒнх и bвх, bнх выражения (13) всегда найдутся эквивалентные значения ƒэкв, bэкв, которые соответствуют равенству ƒвх⋅bвх-fнх⋅bнх=ƒэкв⋅bэкв по отношению к выражению (14) и соответствуют равенству ƒэкв⋅bэкв=ƒo⋅b по отношению к выражению (1). Следовательно, имеет право быть равенство ƒвх⋅bвx-ƒнх⋅bнх=ƒо⋅b, которое обнаруживает, что по функциональному назначению система, в которой осуществлен заявленный способ, тождественна классическому пеленгатору. Однако по месту получения навигационной информации - на борту ЛА о его местоположении относительно ВПП - система является радиомаячной. Стало быть, заявленная система есть радиомаячная фазопеленгационная.
Из выражения (13) следует: 
направляющий косинус (cos αх) угла αх между линией визирования точки V местонахождение ЛА и линией базы антенн BхHх прямо пропорционален измеряемой разности фаз ΔΨх сигналов авх, ао, анх, принимаемых на борту ЛА, и обратно пропорционален конструктивному параметру (ωвх⋅bвх-ωнх⋅bнх) антенной базы BxHx.
Подобным образом измеряют на борту ЛА направляющий косинус (cos α2), сформированный из фазовых сдвигов сигналов, излучаемых антеннами оси Z радиомаяка.
По результатам определения на борту ЛА четырех направляющих косинусов положения ЛА относительно осей X и Z двух радиомаяков, установленных в районе приземления ЛА на ВПП по разные стороны от ее оси, симметрично относительно ее оси, и отстоящих друг от друга на базовом расстоянии Б системы, и знании величины базового расстояния Б между радиомаяками, вычисляют прямоугольные координаты положения ЛА относительно точки приземления ЛА на ВПП по формулам, полученным по ниже приведенному методу.
На фиг. 4 и фиг. 3 изображены: местная прямоугольная система координат ВПП 0XYZ с центром в точке приземления ЛА на ВПП, радионавигационные точки (РНТ) А1 и А2 расположения центров антенных систем радиомаяков; точка С (Хс, Zc, Yc) - точка местонахождения антенны радиоприемника бортового пеленгатора ЛА; база системы посадки Б и четыре угла αх1, αz1, αx1, αz2, являющиеся аргументами направляющих косинусов.
Основу геометрии взаимосвязи навигационных параметров системы посадки (значения размера базы Б системы посадки и значения четырех направляющих косинуса), имеющихся на борту ЛА, с положением ЛА в прямоугольной системе координат 0XYZ (фиг. 4, фиг. 5) составляет один вид геометрических фигур - прямоугольный треугольник. В построении использовано одно геометрическое свойство - прямая и точка вне ее всегда принадлежат одной и только одной плоскости.
На фиг. 4 оси X радиомаяков, центры антенных систем которых расположены в РНТ А1 и А2, параллельны местной оси X ВПП. Ось X радиомаяка, центр антенной системы которого расположен в РНТ А1, и точка С положения ЛА принадлежат плоскости, ограниченной прямоугольником A1A'cCC1, диагональю которого является линия визирования D1. Аналогично, ось X радиомаяка, центр антенной системы которого расположен в РНТ А2, и точка С положения ЛА принадлежат плоскости, ограниченной прямоугольником А2А'cСС2, диагональю которого является линия визирования D2.
Длина линий визирования ЛА от РНТ А1 и РНТ А2 есть дальности D1 и D2.
На фиг. 5 оси Z радиомаяков, центры антенных систем которых расположены в РНТ А1 и А2, принадлежат местной оси Z ВПП. Местная ось Z и точка С положения ЛА принадлежат плоскости, ограниченной прямоугольником А1А2С'2С'1, диагоналями частей которого являются дальности D1 и D2.
Формируемые двумя радиомаяками и измеряемые на борту ЛА направляющие косинусы соответственно обозначены: cos αx1, cos αz1, cos αх2, cos αz2. При этом:

В квадрате A1A2C2C1 (фиг. 4 и фиг. 5) имеют соотношения:

А1С1=А2С2=АcСc=Хc.
Из рассмотрения фиг. 4 видно, что:
в треугольнике A1CC1: 
в треугольнике А2СС2: 
Это значит: D1⋅cos αx1=D2⋅cos αх2, откуда: 
Из рассмотрения фиг. 5 видно, что:
в треугольнике А1САc: А1Аc=D1⋅cos αz1;
в треугольнике А2САc: А2Аc=D2⋅cos αz2.
Заменив в данных выражениях А1Аc и А2Аc из (16) получают:
0,5Б-Zc=D1⋅cos αz1, 0,5Б+Zc=D2⋅cos αz2.
Если складывают полученные выражения, то получают:
0,5Б+Zc+0,5Б-Zc=D2⋅cos αz2+D1⋅cos αzl;

Если вычитают полученные выражения, то получают:
0,5Б+Zc-(0,5Б-Zc)=D2⋅cos αz2-D1⋅cos αz1;
2Zc=D2⋅cos αz2-D1⋅cos αz1;
откуда: 
Подставив (17в) в (18a) получают:

Из полученного выражают D1 через Б имеют:

Выразив D1=D2⋅cos αx2/cos αx1, как это сделано в (17в), и подставив этот результат в (18а), получают: 
В выражение (17a) Xc=D1⋅cos αx1 подставив (18в), получают:

Имеем формулу (20) для преобразования на борту ЛА значения величины базы системы посадки Б и значений измеряемых направляющих косинусов cos αх1, cos α1, cos αх2, cos αz2 в значение прямоугольной координаты Хс положения ЛА в местной системе координат ВПП.
Подставив (17в) в (18б), получают:
Zc=0,5⋅(D1⋅cos αx1⋅cos αz2/cos αx2-D1 cos αz1)=
=0,5D1⋅(cos αx1⋅cos αz2-cos αx2 cos αz1)/cos αx2;
Подставив в полученное выражение D1 из (19а), получают:
Zc=0,5D1⋅(cos αx1⋅cos αz2-cos αx2⋅cos αz1)/cos αx2=
=0,5Б⋅(cos αx1⋅cos αz2-cos αx2⋅cos αz1)⋅cos αx2/(cos αx1⋅cos αz2+cos αz2+cos αx2⋅cos αz1)⋅cos αx2;
откуда: 
Имеем формулу (21) для преобразования на борту ЛА значения величины базы системы посадки Б и значений измеряемых направляющих косинусов cos αx1, cos αz1, cos αx2, cos αz2 в значение прямоугольной координаты Zc положения ЛА в местной системе координат ВПП.
В квадрате СА'cАcС'c (фиг. 5) имеют соотношения:

Из рассмотрения фиг. 5 видно, что: A1C=D1, А2С=D2;
в треугольнике А1СА'1: 
в треугольнике А2СА'2: 
С учетом (22б) и (22в) выражения (22а) примут вид:
Yc1=D1⋅cos αy1, Yc2=D2⋅cos αy2.
С учетом определений для cos αy1 и cos αу2, приведенных в (15), получают:

Подставив в данные выражения из (19а) и (19б) значения для D1, D2, получают:

Имеем формулы (23) для преобразования на борту ЛА значения величины базы системы посадки Б и значений измеряемых направляющих косинусов cos αx1, cos αz1, cos αх2, cos αz2 в значение прямоугольной координаты Yc положения ЛА в местной системе координат ВПП. Наличие двух равнозначных формул в выражении (23) означает, что система посадки обладает избыточностью получаемой информации, которая может быть использована для повышения точности посредством усреднения: Yc=(Yc1+Yc2)/2.
Формулы (20), (21), (23) используют в вычислителе ЛА для преобразования измеряемых навигационных параметров в прямоугольные координаты положения ЛА, которые, затем, преобразовывают в навигационные элементы посадки: боковое отклонение ЛА от оси ВПП, дальность до точки приземления ЛА на ВПП, высоту и скорость полета ЛА, его текущую глиссаду, скорость снижения ЛА, которые отображают в удобной экипажу форме на дисплее ЛА или используют для автоматической посадки ЛА.
Если в выражении (14) задают ограничения на изменение αx или αz
на интервале [0°, 180°] и ограничения на изменение ΔΨ на интервале [π/2, -π/2], то для значений α равных 0°, 90°, 180° и соответствующих значений ΔΨ равных π/2б 0, -π/2 получают три уравнения:
а) α=0°, ΔΨ=π/2, тогда:
cos 0°=π/2⋅c/2π⋅(ƒв⋅bв-ƒн⋅bн)
 4⋅(ƒв⋅bв-ƒн⋅bн)=c;
4⋅(ƒв⋅bв-ƒн⋅bн)=c;
1=4c-1⋅(ƒв⋅bв-ƒн⋅bн), откуда: 
б) α=90°, ΔΨ=0, тогда:
cos 90°=0⋅c/2π⋅(ƒв⋅bв-ƒн⋅bн)
0=0⋅c/2π⋅(ƒв⋅bв-ƒн⋅bн); откуда: 
Выражение (25) при ΔΨ=0 содержит неопределенность 0=0, поэтому его достоверность для соотношения ƒв⋅bв-ƒн⋅bн, определенная выражением (24), возможна лишь в дальней зоне.
в) α=180°, ΔΨ=-π/2, тогда:
cos 180°=-π/2⋅c/2π⋅(ƒв⋅bв-ƒн⋅bн)
-4⋅(ƒв⋅bв-ƒн⋅bн)=-c;
 данное выражение есть выражение (24).
данное выражение есть выражение (24).
Из выражения (24) следует: 
Выражением (26) обозначено соотношение частот излучаемых радиомаяком сигналов и размеров измерительных баз его антенной системы (фиг. 2) - с учетом ограничений для α и ΔΨ, заданных выше.
Пример.
1. Задают частоты сигналов радиомаяка:
радиосигнал ƒ=3000 МГц = 30⋅108 Гц;
тональный сигнал Fx=1 МГц = 0,01⋅108 Гц;
тональный сигнал Fz=15 МГц = 0,15⋅108 Гц.
2. Задают измерительные базы антенной системы радиомаяка: bнх=bнz=0,25 м (фиг. 2).
3. Определяют частоты сигналов радиомаяка, излучаемые антеннами Вх, Нх, Вz, Нz:
антенной Вх излучают сигнал на частоте ƒвх=ƒ+Fx=30⋅108+0,01⋅108=30,01⋅108 (Гц);
антенной Нх излучают сигнал на частоте ƒнх=ƒ-Fx=30⋅108-0,01⋅108=29,99⋅108 (Гц);
антенной Вz излучают сигнал на частоте ƒвz=ƒ+Fz=30⋅108+0,15⋅108=30,15⋅108 (Гц):
антенной Нz излучают сигнал на частоте ƒнz=ƒ-Fz=30⋅108-0,15⋅108=29,85⋅10s (Гц).
4. По формуле (26) вычисляют значения bвх и bвz измерительных баз антенной системы:
Для условий применения радиомаяка α∈[0°, 180°] и ΔΨ∈[π/2, -π/2], частоте радиосигнала ƒ=3000 МГц и тональных сигналов Fx=1,0 МГц и Fz=15,0 МГц необходимо иметь размеры измерительных баз антенной системы радиомаяка, равные:
bнх=bнz=0,25 м, bвх≈0,2748 м, bвz≈0,2724 м.
Описание и математическое обоснование предлагаемого способа, осуществляемого (фиг. 1, фиг. 2), выполнено при допущениях:
1) фазовые задержки сигналов в избирательных фильтрах 5, 6, 7 равны между собой;
2) фазовые задержки сигналов в избирательных фильтрах 15, 16, 17 равны между собой;
3) фазовые задержки сигналов в фильтрах разностной частоты 19 равны между собой;
4) амплитуды сигналов на выходе генераторов 2, 3, модулятора 4, усилителей мощности 8, на входах и выходах преобразователей частоты 18 и на входах измерителей разности фаз 20 достаточны для дальнейшего использования и условно равны единице.
При полученных исходных параметрах антенной системы и обозначенных допущениях можно достигнуть возможности определения на борту ЛА его пространственного положения относительно ВПП и отображения экипажу в реальном масштабе времени этого положения.
Заявленная система посадки малогабаритна, имеет малый вес, экономична, мобильна в разворачивании и сворачивании, не требует постоянного технического обслуживания, подвержена управлению включением в работу и выключению извне по радиоканалу. Она может быть востребована при освоении труднодоступных районов Крайнего Севера и Дальнего Востока, для осуществления посадки ЛА на подготовленные площадки, участки автотрасс, авианосцы, для автоматической посадки беспилотных ЛА различного назначения многоразового использования. Она также может оказаться эффективной к применению в морском флоте - для преодоления проливов и в прибрежных акваториях с изломанной береговой линией.

Способ оценки чистоты воздуха гермокабин летательных аппаратов, поступающего от компрессоров газотурбинных двигателей, на содержание продуктов разложения смазочных масел
Система управления летным экспериментом
Поисковая экспертная система
Способ определения и сигнализации о приближении несущего винта к зоне режимов "вихревого кольца" на предпосадочных маневрах одновинтового вертолета
Способ оценки горизонтальных составляющих индуктивных скоростей на малых скоростях полёта одновинтового вертолёта
Способ определения механических напряжений в деталях, изготовленных на металлорежущих станках
Экспертная система контроля работы бортового оборудования летательных аппаратов
Полиэргатический тренажерный комплекс предупреждения столкновений летательных аппаратов
Способ искробезопасной заправки топливных баков летательного аппарата топливом под давлением
Способ уменьшения угла атаки несущего винта на предпосадочных маневрах одновинтового вертолета (варианты)
Способ оценки чистоты воздуха гермокабин летательных аппаратов, поступающего от компрессоров газотурбинных двигателей, на содержание продуктов разложения смазочных масел
Система управления летным экспериментом
Поисковая экспертная система
Способ определения и сигнализации о приближении несущего винта к зоне режимов "вихревого кольца" на предпосадочных маневрах одновинтового вертолета
Способ оценки горизонтальных составляющих индуктивных скоростей на малых скоростях полёта одновинтового вертолёта
Экспертная система контроля работы бортового оборудования летательных аппаратов
Полиэргатический тренажерный комплекс предупреждения столкновений летательных аппаратов
Способ искробезопасной заправки топливных баков летательного аппарата топливом под давлением
Способ уменьшения угла атаки несущего винта на предпосадочных маневрах одновинтового вертолета (варианты)
Интеллектуальная система поддержки экипажа

