Результат интеллектуальной деятельности: Система управления маневровыми локомотивами
Вид РИД
Изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики, в частности к системе маневровой автоматической локомотивной сигнализации, и может быть использовано для управления маневровыми локомотивами, в том числе и в режиме без участия машиниста.
Известна система маневровой автоматической локомотивной сигнализации (МАЛС), включающая бортовую аппаратуру, станционное устройство и сервисное оборудование, предназначенное для проверки работоспособности, диагностики и выявления дефектов в бортовой аппаратуре и станционном устройстве (RU 2369509, B61L 27/04, 10.10.2009).
Известная система позволяет автоматизировать процесс управления маневровыми передвижениями на железнодорожных станциях. Однако управление маневровыми локомотивами при выполнении маневровой работы осуществляется с участием локомотивной бригады, дежурного по станции и составителя.
Известна система для удаленного беспроводного доступа к управлению локомотивом (ZA 200807499, B61L 3/12, 25.11.09). В известной системе управление локомотивов осуществляют с удаленной точки с помощью портативного модуля управления, соединенного с управляющим модулем бортовой системы локомотива посредством беспроводного канала связи.
Однако скоростной режим движения локомотива и зона его перемещения не контролируются со стороны системы централизации, что негативно влияет на безопасность выполняемых операций.
Наиболее близким аналогом является комплексная система управления маневровыми локомотивами, содержащая установленные на станции управляющий вычислительный комплекс маневровой автоматической локомотивной сигнализации и станционный приемник навигационных сигналов, вход/выход которого соединен с выходом/входом управляющего вычислительного комплекса маневровой автоматической локомотивной сигнализации, другие входы/выходы которого соединены с выходами/входами, по крайней мере, одного автоматизированного рабочего места дежурного по станции, установленное, по крайне мере, на одном маневровом локомотиве бортовое устройство управления, включающее контроллер связи, бортовой приемник навигационных сигналов, приемопередающее устройство, блок управления, первый выход которого подключен к входу средства управления тягой, второй выход - к входу средства управления торможением, блок контроля и обработки информации, первые входы/выходы которого соединены с выходами/входами контроллера связи, первым входом/выходом соединенного с выходом/входом приемника навигационных сигналов, а другим входом/выходом - с выходом/входом приемопередающего устройства, соединенного радиоканалами посредством станционной системы связи с управляющим вычислительным комплексом маневровой автоматической локомотивной сигнализации и пультом дистанционного управления маневровым локомотивом, блок разрешенных режимов, входы/выходы которого соединены с соответствующими выходами/входами блока управления, другими входами/выходами подключенного к соответствующим выходам/входам блока контроля и обработки информации, блок индикации и формирователь сигнала экстренной остановки локомотива, входы которых соединены с соответствующими выходами блока контроля и обработки информации, другими входами подключенного к выходам датчиков, при этом бортовой и станционный приемники навигационных сигналов посредством беспроводного канала радиосвязи соединены со спутниковой радионавигационной системой (RU 102345, B61L 3/00, 27.02.2011).
Известная система обеспечивает дистанционное управление маневровым локомотивом при его движении по маршруту, задаваемому системой электрической централизации. Однако она не позволяет сконцентрировать управление на посту управления при выполнении технологических операций без участия машиниста и составителя поездов.
Задачей, на решение которой направлено настоящее изобретение, является создание системы управления маневровыми локомотивами, в том числе без машиниста при выполнении технологических операций, не требующих участия составителя, под управлением дежурного по станции.
Технический результат заключается в расширении функциональных возможностей за счет возможности управления маневровыми локомотивами в режиме без участи машиниста и составителя поезда.
Технический результат достигается тем, что система управления маневровыми локомотивами содержит управляющий вычислительный комплекс маневровой автоматической локомотивной сигнализации, аппаратно-программные устройства автоматизированных рабочих мест маневровой автоматической локомотивной сигнализации по диагностике, информационному обеспечению и управлению маневровыми локомотивами, и размещенное на каждом маневровом локомотиве бортовое устройство системы маневровой автоматической локомотивной сигнализации, при этом управляющий вычислительный комплекс включает последовательно соединенные концентратор поля, блок контроля за перемещением и состоянием локомотивных и станционных устройств, блок контроля технологических операций и блок задания маршрута и скорости, выход которого подключен к станционному приемопередающему устройству, второй вход - к выходу станционной дифференциальной станции, а третий вход - через блок идентификации локомотива ко второму выходу блока контроля за перемещением и состоянием локомотивных и станционных устройств, второй вход которого соединен с выходом станционного приемопередающего устройства, а вход/выход подключен к локальной сети передачи данных для информационного взаимодействия с аппаратно-программными устройствами автоматизированных рабочих мест маневровой автоматической локомотивной сигнализации, и блок сопряжения для взаимодействия управляющего вычислительного комплекса с центральным процессором системы микропроцессорной централизации, подключенный входом к третьему выходу блока контроля за перемещением и состоянием локомотивных и станционных устройств, а первым и вторым выходами - соответственно к четвертому входу блока задания маршрута и скорости и входу концентратора поля, соединенного вторым, третьим и четвертым выходами соответственно с пятым входом блока задания маршрута и скорости и вторыми входами блоков контроля технологических операций и идентификации локомотивов, каждое бортовое устройство включает вычислитель, блок индикации и управления, электронный регулятор, первый вход/выход которого подключен к шине управления силовыми модулями управления тягой, торможением, сцеплением, прожекторами, звуковыми сигналами и реверсом локомотива, дальномеры, установленные на концевых брусьях локомотива для контроля за расстоянием до вагонов по ходу движения и подключенные выходами к соответствующим входам электронного регулятора, к другим входам которого подключены выходы датчиков скорости, тока тягового двигателя и давления в тормозных цилиндрах, блок выбора режима управления, соединенный входом/выходом со вторым выходом/входом электронного регулятора, а выходом - с управляющим входом блока управления режимами проверки бдительности машиниста, приемопередатчик для обеспечения информационного взаимодействия по радиоканалу с приемопередающим устройством управляющего вычислительного комплекса маневровой автоматической локомотивной сигнализации, приемник навигационных сигналов, блок речевого информирования и блок управления экстренным торможением, причем соответствующие выходы вычислителя подключены к входам блоков управления экстренным торможением и речевого информирования, входы - к выходам приемника навигационных сигналов и датчика скорости и направления движения, а соответствующие входы/выходы - к выходам/входам блока индикации и управления, приемопередатчика и третьему выходу/входу электронного регулятора.
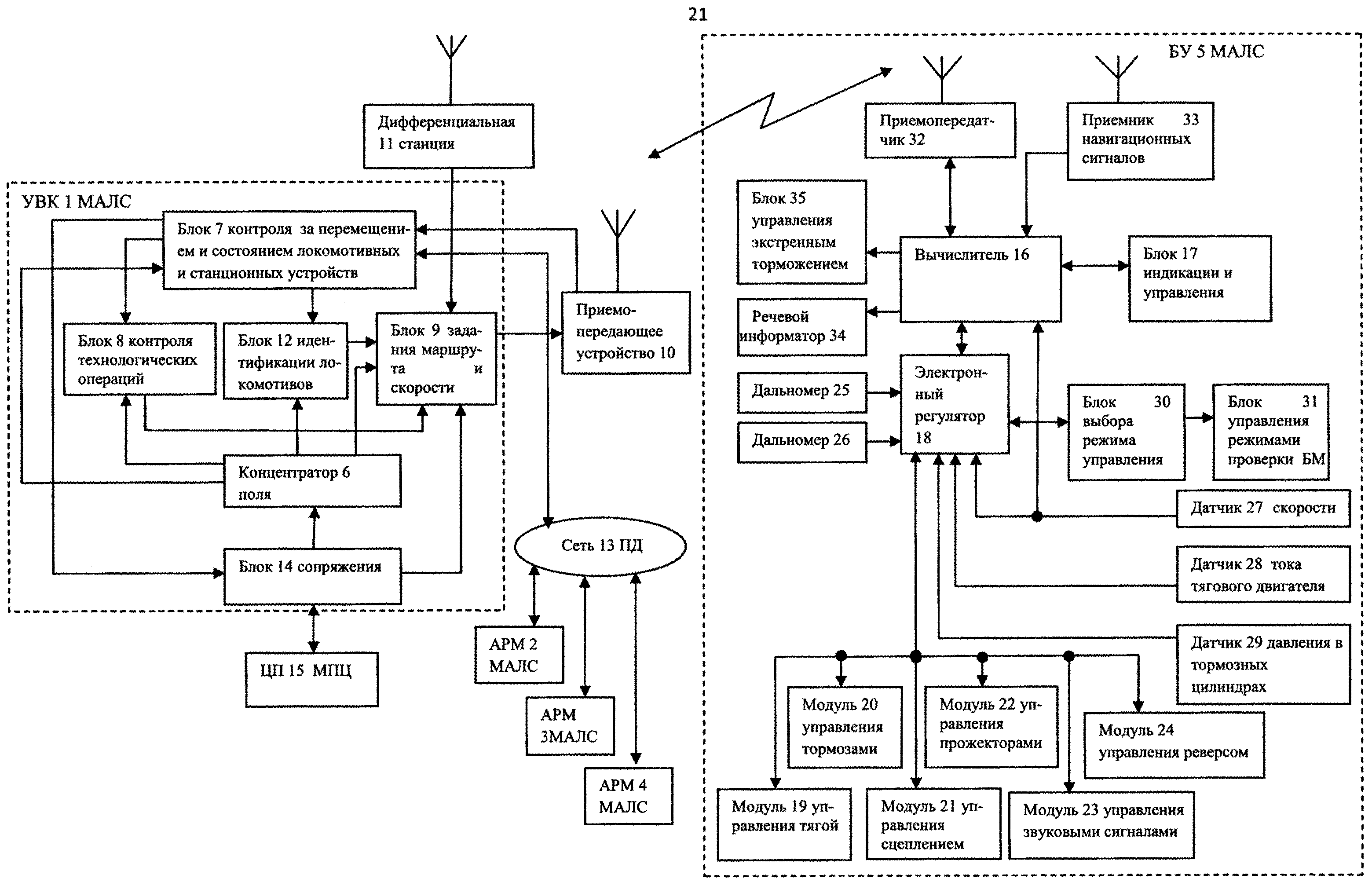
Сущность заявленного изобретения поясняется чертежом, на котором представлена структурная схема системы управления маневровыми локомотивами.
Система управления маневровыми локомотивами содержит установленные на станции управляющий вычислительный комплекс 1 маневровой автоматической локомотивной сигнализации (УВК 1 МАЛС) и аппаратно-программные устройства автоматизированных рабочих мест 2-4 маневровой автоматической локомотивной сигнализации (АРМ 2-4 МАЛС) соответственно по диагностике, информационному обеспечению и управлению маневровыми локомотивами, и размещенное на каждом маневровом локомотиве бортовое устройство 5 маневровой автоматической локомотивной сигнализации (БУ 5 МАЛС).
УВК 1МАЛС включает последовательно соединенные концентратор 6 поля, блок 7 контроля за перемещением и состоянием локомотивных и станционных устройств, блок 8 контроля технологических операций и блок 9 задания маршрута и скорости, выход которого подключен к входу станционного приемопередающего устройства 10, второй вход - к выходу станционной дифференциальной станции 11, а третий вход - через блок 12 идентификации локомотива ко второму выходу блока 7 контроля за перемещением и состоянием локомотивных и станционных устройств, второй вход которого соединен с выходом станционного приемопередающего устройства 10, а вход/выход подключен к локальной сети 13 передачи данных для информационного взаимодействия с аппаратно-программными устройствами АРМ 2-4 МАЛС, и блок 14 сопряжения для взаимодействия управляющего вычислительного комплекса с центральным процессором 15 системы микропроцессорной централизации (ЦП 15 МПЦ), подключенный входом к третьему выходу блока 7 контроля за перемещением и состоянием локомотивных и станционных устройств, а первым и вторым выходом соответственно - к четвертому входу блока 9 задания маршрута и скорости и входу концентратора 6 поля, соединенного вторым, третьим и четвертым выходами соответственно с пятым входом блока 9 задания маршрута и скорости и вторыми входами блоков 8 и 12 контроля технологических операций и идентификации локомотивов.
Каждое БУ 5 МАЛС включает вычислитель 16, блок 17 индикации и управления, электронный регулятор 18, первый вход/выход которого подключен к шине управления силовыми модулями 19-24 управления соответственно тягой, торможением, сцеплением, прожекторами, звуковыми сигналами и реверсом локомотива, дальномеры 25 и 26, установленные на концевых брусьях локомотива для контроля за расстоянием до вагонов по ходу движения и подключенные выходами к соответствующим входам электронного регулятора 18, к другим входам которого подключены выходы датчиков 27-29 соответственно скорости, тока тягового двигателя и давления в тормозных цилиндрах, блок 30 выбора режима управления, соединенный входом/выходом со вторым выходом/входом электронного регулятора 18, а выходом - с управляющим входом блока 31 управления режимами проверки бдительности машиниста, приемопередатчик 32 для обеспечения информационного взаимодействия по радиоканалу с приемопередающим устройством 10 УВК 1, приемник 33 навигационных сигналов, блок 34 речевого информирования и блок 35 управления экстренным торможением.
При этом соответствующие выходы вычислителя 16 подключены к входам блоков 35 и 34 управления экстренным торможением и речевого информирования, входы - к выходам приемника 33 навигационных сигналов и датчика 27 скорости и направления движения, а соответствующие входы/выходы - к выходам/входам блока 17 индикации и управления, приемопередатчика 32 и третьему выходу/входу электронного регулятора 18.
Система управления маневровыми локомотивами функционирует следующим образом.
УВК 1 МАЛС с помощью устройства сопряжения 14 осуществляет циклический обмен информацией с ЦП 15 МПЦ. От ЦП 15 МПЦ в УВК 1 МАЛС поступает информация о состоянии устройств централизации на станции и задаваемых маршрутах движения: свободность/занятость изолированных участков пути, положение +/- стрелочных переводов и их замыкание в маршруте, состояние светофоров разрешающее/запрещающее движение, команды, вводимые дежурными по станции, например разрешение проезда светофора с запрещающим показанием, выезда на перегон, проезда ложно занятого участка и т.п., а УВК 1 МАЛС передает в ЦП 15 МПЦ координаты и параметры движения маневровых локомотивов.
Блок 9 УВК 1 МАЛС по данным ЦП 15 МПЦ формирует маршрутные задания локомотивам, зарегистрированным в системе управления маневровыми локомотивами, и вместе с дифференциальной поправкой, поступающей от дифференциальной станции 11, передает их вычислителю 16 БУ 5 МАЛС каждого локомотива по каналу радиосвязи с помощью стационарного приемопередающего устройства 10 и локомотивного приемопередатчика 32.
Вычислитель 16 каждого маневрового локомотива на основе маршрутного задания вычисляет длину маршрута, как сумму длин входящих в него изолированных участков, определяет конечный элемент маршрута - название светофора, пути или тупика, определяет допустимое значение скорости движения локомотива как минимальное значение допустимых скоростей на участках занимаемых локомотивом с вагонами, формирует признак выполняемой технологической операции и передает эту информацию регулятору 18 для реализации, а блоку 17 индикации и управления - для отображения.
Кроме того, вычислитель 16 осуществляет контроль за исполнением заданной операции на основании данных о параметрах скорости, направлении движения маневрового локомотива и давления в его тормозных цилиндрах, поступающих от электронного регулятора 18 и датчика 27 скорости и направления движения.
Измерения в режиме реального времени скорости и направления движения маневрового локомотива, тока тягового двигателя локомотива и давления в тормозных цилиндрах осуществляют датчики 27-29.
При этом приемник 33 навигационных сигналов в режиме реального времени осуществляет прием навигационных сигналов от спутниковой системы навигации, например ГЛОНАСС, и определяет местонахождение маневрового локомотива с учетом дифференциальной поправки. Дальномеры 25 и 26, установленные на концевых брусьях локомотива, измеряют расстояние локомотива до вагона по ходу движения локомотива.
Данные об исполнении заданной операции и о координатах местоположения локомотива вычислитель 16 каждого маневрового локомотива по каналу радиосвязи с помощью локомотивного приемопередатчика 32 и стационарного приемопередающего устройства 10. передает в блок 7 контроля за перемещением и состоянием локомотива и станционных устройств УВК 1 МАЛС.
Электронный регулятор 18 с учетом выбранного режима управления передает соответствующее сообщение блоку 30 выбора режима управления и осуществляет управление локомотивными устройствами с помощью модулей 19-24 соответственно тягой, тормозами, сцепками, прожекторами, звуковыми сигналами и реверсором, а также - контроль их работоспособности. Результаты контроля, а также данные датчиков 27, 28 и 29 о значениях скорости и направлении движения локомотива, давления в тормозных цилиндрах и тока тягового двигателя локомотива и результаты измерения дальномеров 25 и 26 регулятор 18 передает в вычислитель 16.
В зависимости от выбранного режима управления блок 30 формирует управляющий сигнал и передает его в блок 31.
В режиме «без участия машиниста» блок 31 отключает режим проверки бдительности машиниста, а регулятор 18 контролирует неизменность исходного состояния органов «ручного» управления локомотивом соответствующее режиму «без участия машиниста».
При переходе в режим управления с машинистом электронный регулятор 18 разрешает «ручное» управление локомотивом, а блок 31 включает режим контроля бдительности машиниста. При внешнем вмешательстве в управление локомотивом в режиме «без участия машиниста» регулятор 18 принудительно останавливает локомотив и переводит его в режим управления машинистом.
При изменении скоростного режима локомотива вычислитель 16 формирует соответствующую команду, инициирующую включение блока 34, который с помощью речевых и звуковых сообщений информирует машиниста об изменении скоростного режима. При отказах локомотивного оборудования или аппаратуры БУ 5 МАЛС или по команде УКВ 1 МАЛС вычислитель 16 формирует соответствующую команду для включения блока 35 экстренного торможения.
Информация о состоянии стрелочных переводов, светофоров и изолированных участков, поступающая в УВК 1 МАЛС из центрального процессора 15 системы микропроцессорной централизации, накапливается и обновляется в концентраторе 6 поля.
Блок 7 контроля за перемещениями и состоянием локомотивных и станционных устройств по данным концентратора 6 поля и цифровой модели путевого развития, включающей данные о длине, допустимой скорости, уклоне по каждому изолированному участку зоны действия системы МАЛС, заложенной в его памяти, формирует поездную ситуацию на станции с учетом координат и параметров движения маневровых локомотивов с вагонами, информация о которых поступает с БУ 5 МАЛС каждого маневрового локомотива. Данные о поездной ситуации на станции блок 7 передает в блоки 12 и 8, а через локальную сеть 12 передачи на аппаратно-программные устройства АРМ 2-4 МАЛС. Кроме того, блок 7 осуществляет передачу данных о локомотивах и диагностические сообщения о состоянии локомотива и бортовых устройств 5 МАЛС через блок 14 сопряжения в центральный процессор 15 системы микропроцессорной централизации.
Блок 12 идентификации локомотива осуществляет проверку соответствия между маневровым локомотивом, занимаемым им участком путевого развития станции и задаваемым ему маршрутом движения. Результаты проверки блок 12 передает в блок 9 задания маршрута и скорости.
Центральный процессор 15 системы МПЦ передает через блок 14 сопряжения в блок 9 для передачи в БУ 5 МАЛС маневровых локомотивов команды дежурного по станции, формируемые с АРМ этой системы.
Дифференциальная станция 11 передает в блок 9 значение дифференциальной поправки для обеспечения заданной точности позиционирования маневрового локомотива на цифровой модели путевого развития, а блок 8 контроля технологических операций - данные о выполняемых маневровым локомотивом технологических операциях в выбранном режиме управления.
Блок 9 задания маршрута и скорости на основе полученных данных формирует соответствующую телеграмму, включающую перечень участков, по которым разрешено движение в четном и нечетном направлении с указанием их длины и допустимой скорости движения, конечного элемента маршрута, положение стрелочных переводов и состояние светофоров по маршруту, а также значение дифференциальной поправки, и направляет ее в приемопередающее устройство 10 для передачи БУ 5 МАРС маневрового локомотива.
Порядок функционирования системы управления маневровым локомотивом заключается в последовательном выполнении следующих операций:
- установление связи по радиоканалу между УВК 1 МАЛС и БУ 5 МАЛС после его включения в зоне радиопокрытия приемопередающего устройства 10;
- позиционирование маневрового локомотива по данным навигационного приемника 33 и ЦП 15 МПЦ,
- формирование и передача УВК 1 МАЛС БУ 5 МАЛС локомотива маршрутных заданий;
- формирование БУ 5 МАЛС локомотива скоростного режима движения и его реализация с учетом выбранного режима управления локомотивом.
В режиме управления «без участия машиниста» могут выполняться, например, работы по надвигу и роспуску составов на сортировочную горку, которые не требуют участия составителя, и включают периодически повторяемую последовательность технологических операций, а именно заезд локомотива под состав, прицепка к вагонам состава, проверка надежности прицепки, надвиг состава на горку и роспуск состава. Перечисленные операции выполняют под управлением дежурного по станции и сопровождаются соответствующей индикацией на станционном АРМ 4 МАЛС и блоке 17 индикации и управления БУ 5 МАЛС.
При отказах устройств системы или локомотивного оборудования вычислитель 16 останавливает локомотив с помощью блока 35 и формирует соответствующее сообщение, которое направляет в приемопередатчик 32 для передачи по каналу радиосвязи в приемопередающее устройство 10 УВК 1 МАЛС. Приемопередающее устройство 10 полученное сообщение передает в блок 7, который через сеть 13 передачи данных направляет его в аппаратно-программное устройство АРМ 2-4 МАЛС. На экране монитора АРМ 4 МАЛС в этом случае отображается информация, информирующая дежурного по станции о необходимости вызова машиниста на локомотив.
Режим работы системы управления с машинистом предусматривает два подрежима управления: «ручное управление» и «автоматическое управление».
Машинист, управляя локомотивом, приводит его в зону возможного управления в режиме «без участия машиниста» и останавливает, приводя в действие тормоза. Управление локомотивом при выполнении данной операции осуществляет машинист в подрежиме «ручного управления». При выполнении операций в подрежиме «ручного управления» локомотивом вычислитель 16 бортового устройства 5 МАЛС осуществляет принудительное торможение только в случае нарушения допустимого скоростного режима или в подрежиме «автоматического управления», когда система управляет скоростью локомотива на маршруте так же, как и в режиме «без участия машиниста», но команду на начало движения дает машинист.
С помощью блока 17 машинист выбирает подрежим управления. В этом случае блок 17 формирует соответствующую команду вычислителю 16, который направляет соответствующий сигнал регулятору 18 для реализации заданного скоростного режима при «автоматическом управлении» или контроле скорости движения локомотива при «ручном управлении».
Зона возможного управления в режиме «без участия машиниста» включает, как правило, пути парка приема и его стрелочные горловины вплоть до вершины горки с одной стороны и стрелочные и бесстрелочные участки, замыкаемые в маршрутах заезда локомотива под состав с другой.
При этом для каждой станции зона возможного управления в режиме управления «без участия машиниста», перечень и последовательность выполнения в этом режиме технологических операций регистрируется в блоке 9 контроля технологических операций на подготовительном этапе настройки системы управления маневровым локомотивом перед ее эксплуатацией.
Машинист маневрового локомотива с помощью блока 30 выбирает режим управления «без участия машиниста». При этом блок 30 передает в блок 31 сигнал для отключения режима проверки бдительности машиниста, а регулятору 18 - сигнал, характеризующий признак режима управление «без участия машиниста».
Электронный регулятор 18, получив сигнал, характеризующий признак режима управление «без участия машиниста», одновременно с ним передает в вычислитель 16 данные о работоспособности системы, параметрах контролируемых узлов локомотива. Кроме того, в вычислитель 16 с выхода приемника 33 навигационных сигналов в режиме реального времени поступают данные о координатах местонахождения локомотива.
При условии исправности аппаратуры системы и локомотива вычислитель 16 формирует телеграмму-запрос, содержащую запрос о разрешении перехода локомотива в режим управления «без участия машиниста», а также данные о работоспособности системы, параметрах контролируемых узлов локомотива и его местоположении, которую через приемопередатчик 32 по каналу радиосвязи передает приемопередающему устройству 10 для направления в блок 7 контроля за перемещением и состоянием локомотивных и станционных устройств УВК 1 МАЛС. Одновременно вычислитель 16 информацию о передаче телеграммы, содержащей запрос о разрешении перехода локомотива в режим управления «без участия машиниста», передает в блок 17 для отображения на экране.
В случае неисправности локомотивного оборудования или устройств системы управления вычислитель 16 формирует сообщение о выявленной неисправности и через приемопередатчик 32 по каналу радиосвязи передает приемопередающему устройству 10 для направления в блок 7 УВК 1 МАЛС. Одновременно вычислитель 16 формирует соответствующий сигнал и передает его в блок 17 для визуального отображения на экране выявленной неисправности.
Телеграмму-запрос блок 7 через сеть 13 передачи данных направляет в аппаратно-программные устройства АРМ 2-4 МАЛС, на экране монитора каждого из которых отображаются данные о готовности маневрового локомотива к переходу в режим управления «без участия машиниста». Команду подтверждения перехода маневрового локомотива в режим управления «без участия машиниста» посредством аппаратно-программного устройства АРМ 4 МАЛС дежурный по станции передает через сеть 13 передачи данных в блок 7.
Получив команду подтверждения, блок 7 осуществляет проверку местоположения маневрового локомотива в разрешенной зоне управления, его остановки, а также проверку работоспособности системы и узлов локомотива, после чего через блок 12 направляет ее в блок 9, который формирует телеграмму, подтверждающую переход маневрового локомотива в режим управления «без участия машиниста», и передает ее в приемопередающее устройство 10 для передачи по каналу радиосвязи приемопередатчику 32 БУ 5 МАЛС маневрового локомотива.
Приемопередатчик 32 телеграмму, подтверждающую переход маневрового локомотива в режим управления «без участия машиниста», передает вычислителю 16, который через блок 17 информирует машиниста о переходе в режим управления локомотивом «без участия машиниста» и формирует соответствующие команды электронному регулятору 18. Электронный регулятор 18 через блок 20 управления тормозами затормаживает локомотив, через блоки 30 и 31 отключает режим контроля бдительности машиниста, проверяет выполнение осуществляемых операций и сообщает об этом вычислителю 16. В вычислитель 16 поступает следующая информация: позиция тяги 0, позиция реверса - нейтральная, позиция устройств торможения поездное, скорость равна 0, давление в тормозных цилиндрах соответствует торможению, органы «ручного» управления локомотивом в исходном состоянии. При этом вычислитель 16 через блок 17 информирует машиниста о включении режима «без участия машиниста».
В этом случае машинист может покинуть локомотив, управление маневровым локомотивом переходит к дежурному по станции.
Заезд локомотива под состав организуется, как правило, как угловой маршрут, состоящий из двух полурейсов (от вершины горки через путь парка приема за стрелку, соединяющую с путем, занятым искомым составом, и после перевода соединяющей стрелки на занятый путь под состав). Каждому полурейсу предшествует маршрутное задание, формируемое дежурным по станции с помощью ЦП 15 МПЦ штатным порядком. Информация о маршрутном задании ЦП 15 МПЦ через блок 14 сопряжения направляет в концентратор 6 поля, который передает ее в блок 9. Блок 9 формирует маршрутное задание и направляет его в приемопередающее устройство 10 для передачи по каналу радиосвязи в БУ 5 МАЛС маневрового локомотива. Вычислитель 16 БУ 5 МАЛС маневрового локомотива регистрирует маршрутное задание и формирует соответствующую команду о его получении, которую по каналам радиосвязи передает в блок 7 УВК 1 МАЛС.
Блок 7 информацию о маршруте движения каждого локомотива через сеть 13 передачи данных направляет в аппаратно-программные устройства АРМ 2-4 МАЛС с указанием расположения и индивидуального номера локомотива. Информация о расположении каждого маневрового локомотива, его индивидуальном номере и маршруте движения отображается на экранах мониторов АРМ 2-4 МАЛС.
Дежурный по станции проверяет правильность восприятия маршрутного задания и с аппаратно-программного устройства АРМ 4 МАЛС задает для маневрового локомотива ответственную команду, разрешающую движение в определенном направлении, и по сети 13 передает ее в блок 7 УВК 1 МАЛС. Блок 7 направляет ее через блок 12 в блок 9, который передает управляющую команду в приемопередающее устройство 10 для передачи по каналу радиосвязи приемопередатчику 32 бортового устройства 5 МАЛС. С выхода приемопередатчика 32 управляющая команда поступает в вычислитель 16, который передает ее в электронный регулятор 18 для реализации.
Перед началом движения электронный регулятор 18 включает прожектор по ходу движения посредством модуля 22, подает звуковой сигнал через модуль 23, отпускает тормоза с помощью модуля 20, переключает реверсор в направлении движения посредством модуля 24, собирает тягу с помощью блока 19.
В процессе движения вычислитель 16 рассчитывает скорость движения с учетом текущей длины маршрута и передает ее в регулятор 18 для реализации путем управления тягой и тормозами локомотива вплоть до остановки локомотива.
Информацию о движении, остановке локомотива и контролируемых регулятором 18 параметрах вычислитель 16 передает в приемопередатчик 32 для передачи ее по радиоканалу приемопередающему устройству 10. Приемопередающее устройство 10 полученную информацию направляет в блок 7, который через сеть 13 передачи данных передает ее в аппаратно-программные устройства АРМ 2-4 для отображения на экранах их мониторов.
Маршрут локомотива на занятый путь организуется и реализуется аналогичным описанному выше порядком с индикацией на экранах АРМ 2-4 МАЛС названия выполняемой технологической операции, определяемой блоком 8. Скоростной режим движения локомотива, задаваемый вычислителем 16, предусматривает снижение скорости до значения, безопасного для прицепки к вагонам (3-2 км/ч).
За 5 м до вступления локомотива на занятый путь название технологической операции «на занятый путь» на АРМ 2-4 МАЛС меняется на «ожидание сцепки». Одновременно электронный регулятор 18 по команде вычислителя 16 анализирует показания дальномера 25 или 26 по ходу движения и датчика 28 тока тягового двигателя на предмет фиксации прицепки к вагонам и останавливает локомотив.
Проверка надежности прицепки выполняется без участия дежурного по станции. Блок 8 контроля технологических операций проверяет по данным блока 7 возможность осаживания состава в сторону, противоположную сортировочной горке (не менее 10 м) и по результатам проверки формирует соответствующий сигнал, передает его в блок 9. Блок 9 формирует команду на осаживание состава на 5 м, которая поступает в вычислитель 16 по радиоканалу через приемопередающее устройство 10 и приемопередатчик 32 для последующей реализацией электронным регулятором 18 со скоростью 2-3 км/ч.
При этом на АРМ 2-4 МАЛС блок 7 передает сообщение о проверке прицепки локомотива к вагонам.
Если расстояние между локомотивом и прицепленным вагоном не меняется по данным дальномера 25 или 26, а датчик 28 тока тягового двигателя регистрирует значение соответствующее движению локомотива с составом, а не одиночного локомотива, то вычислитель 16 формирует телеграмму с данными о результатах измерения дальномеров 25 или 26 и датчика 28, подтверждающих прицепку локомотива к вагонам, для передачи в УВК 1 МАЛС и дает команду регулятору 18 для выполнения операции остановки локомотива. В противном случае блок 9 УВК 1 МАЛС инициирует повторное выполнение операций прицепки и проверки ее надежности.
Невозможность выполнения операции приводит к остановке локомотива и передаче на АРМ 2-4 МАЛС сообщения о вызове машиниста на локомотив. Надвиг и роспуск состава осуществляется по маршрутам, задаваемым центральным процессором 15 системы МПЦ описанным выше порядком со скоростью, соответствующей показаниям горочного сигнала. Перекрытие горочного сигнала является основанием для остановки локомотива. Выезд локомотива на спускную часть горки в режиме «без участия машиниста» не допускается. После роспуска возможно повторение операции заезда под состав.
Контроль за реализацией скоростного режима, задаваемого локомотиву, осуществляет вычислитель 16 по данным, поступающим от датчиков 27 и 29 через блок 18. При отклонениях фактического значения скорости от заданного на величину, превышающую критическое значение, или некорректном управлении вычислитель 16 останавливает локомотив путем формирования соответствующей команды блоку 35 управления экстренным торможением.
Таким образом, предлагаемая система управления маневровыми локомотивами обеспечивает управление маневровым локомотивом, в том числе без участия машиниста и составителя, под управлением дежурного по станции, что позволяет повысить оперативность управления маневровыми локомотивами на станции и эффективность их использования при сохранении заданного уровня безопасности маневровой работы.
Система управления маневровыми локомотивами, содержащая управляющий вычислительный комплекс маневровой автоматической локомотивной сигнализации, аппаратно-программные устройства автоматизированных рабочих мест маневровой автоматической локомотивной сигнализации по диагностике, информационному обеспечению и управлению маневровыми локомотивами, и размещенное на каждом маневровом локомотиве бортовое устройство системы маневровой автоматической локомотивной сигнализации, при этом управляющий вычислительный комплекс включает последовательно соединенные концентратор поля, блок контроля за перемещением и состоянием локомотивных и станционных устройств, блок контроля технологических операций и блок задания маршрута и скорости, выход которого подключен к станционному приемопередающему устройству, второй вход - к выходу станционной дифференциальной станции, а третий вход - через блок идентификации локомотива ко второму выходу блока контроля за перемещением и состоянием локомотивных и станционных устройств, второй вход которого соединен с выходом станционного приемопередающего устройства, а вход/выход подключен к локальной сети передачи данных для информационного взаимодействия с аппаратно-программными устройствами автоматизированных рабочих мест маневровой автоматической локомотивной сигнализации, и блок сопряжения для взаимодействия управляющего вычислительного комплекса с центральным процессором системы микропроцессорной централизации, подключенный входом к третьему выходу блока контроля за перемещением и состоянием локомотивных и станционных устройств, а первым и вторым выходами - соответственно к четвертому входу блока задания маршрута и скорости и входу концентратора поля, соединенного вторым, третьим и четвертым выходами соответственно с пятым входом блока задания маршрута и скорости и вторыми входами блоков контроля технологических операций и идентификации локомотивов, каждое бортовое устройство включает вычислитель, блок индикации и управления, электронный регулятор, первый вход/выход которого подключен к шине управления силовыми модулями управления тягой, торможением, сцеплением, прожекторами, звуковыми сигналами и реверсом локомотива, дальномеры, установленные на концевых брусьях локомотива для контроля за расстоянием до вагонов по ходу движения и подключенные выходами к соответствующим входам электронного регулятора, к другим входам которого подключены выходы датчиков скорости, тока тягового двигателя и давления в тормозных цилиндрах, блок выбора режима управления, соединенный входом/выходом со вторым выходом/входом электронного регулятора, а выходом - с управляющим входом блока управления режимами проверки бдительности машиниста, приемопередатчик для обеспечения информационного взаимодействия по радиоканалу с приемопередающим устройством управляющего вычислительного комплекса маневровой автоматической локомотивной сигнализации, приемник навигационных сигналов, блок речевого информирования и блок управления экстренным торможением, причем соответствующие выходы вычислителя подключены к входам блоков управления экстренным торможением и речевого информирования, входы - к выходам приемника навигационных сигналов и датчика скорости и направления движения, а соответствующие входы/выходы - к выходам/входам блока индикации и управления, приемопередатчика и третьему выходу/входу электронного регулятора.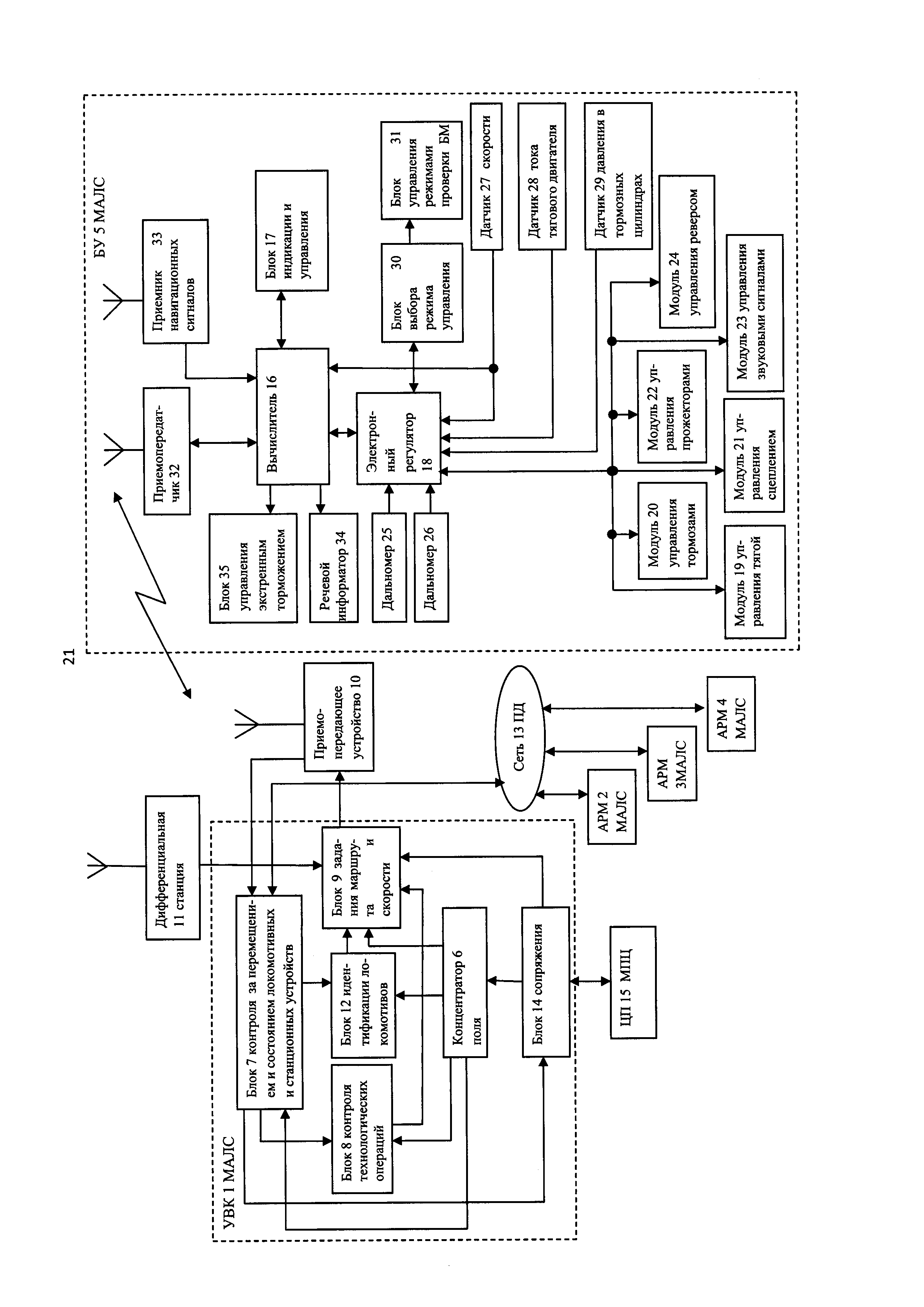
Автоматизированная система для оперативного нормирования парка локомотивов
Способ снижения коммутационных перенапряжений и использование их энергии для питания другого электрооборудования
Блок удержания состава на станционном пути
Система оповещения работающих на железнодорожных путях
Система для регулирования движения поездов
Способ регистрации тяговых параметров при движении поезда и измерительно-вычислительный комплекс для его реализации
Съемник реле железнодорожной автоматики
Тяговый преобразователь электровоза переменного тока для режимов тяги и рекуперативного торможения
Система для управления устройствами электроснабжения объектов телемеханики на железнодорожном транспорте
Устройство предупреждения о падении на путь посторонних предметов с искусственных сооружений
Переносной измеритель усилий нажатия тормозных шин в вагонных замедлителях
Система горочной автоматической локомотивной сигнализации с использованием радиоканала (галс р)
Интеллектуальный блок управления горочным стрелочным электроприводом
Многоуровневая система управления и обеспечения безопасности движения поездов для сортировочных станций
Многоуровневая система управления и обеспечения безопасности движения поездов для крупных железнодорожных станций
Устройство радиолокационного контроля заполнения путей сортировочного парка
Комплексная система управления маневровыми локомотивами

