Результат интеллектуальной деятельности: Способ обеспечения посадки вертолета
Вид РИД
Изобретение
Изобретение относится к навигации и может быть использовано для автоматического управления посадкой вертолета на неподготовленную площадку, лишенную естественных оптических контрастов.
Известен способ, описанный в работе «Системы навигации. Олихов И.М., Косовский Л.А. / Журнал: Электроника - Наука, Технология, Бизнес, 1999, №3», определения положения летательного аппарата (ЛА) в пространстве с помощью мобильной лазерной системы, который состоит в формировании трех цветовых зон в окрестности посадочной траектории и визуальном восприятии летчиком излучения в заданной длине волны, по которой определяется положение ЛА относительно створа взлетно-посадочной полосы (ВПП). Каждый из лазерных маяков создает две непересекающихся (прилегающих) цветовые зоны. Излучение маяков направляют так, чтобы линии прилегания цветовых зон первого и второго маяков были параллельны оси ВПП, при этом формируется центральная зона зеленого цвета - створная полоса, и две боковых зоны желтого и красного цветов соответственно.
Недостатками этого способа являются:
низкая информативность, проявляющаяся в измерении только одного параметра - бокового отклонения от оси ВПП (либо вертикального от глиссады);
низкая точность, обусловленная неопределенным положением ЛА в пределах одной цветовой зоны излучения;
визуальная оценка летчиком положения ЛА, что приводит к необходимости участия человека в контуре управления, при этом автоматическая посадка невозможна.
Известен способ определения местоположения и углов ориентации летательного аппарата относительно ВПП с помощью одного оптико-локационного блока (ОЛБ), установленного на борту ЛА, и системы трех лазерных маяков (световых контрастов), описанный в патенте на изобретение RU №2347240, МПК G01S 17/93, опубл. 20.02.2009. Посредством обработки оцифрованных изображений, снимаемых с фоточувствительной матрицы ОЛБ, определяют координаты изображений лазерных маяков на фоточувствительной матрице, а затем вычисляют координаты и угловое положение ЛА относительно ВПП.
Недостатком способа является необходимость использования световых контрастов, установленных на аэродромах, что не обеспечивает автоматическую посадку на неподготовленную площадку, чем снижается безопасность полетов.
Технической задачей изобретения является измерение положения вертолета относительно земной поверхности, а также определение наклона и неровности земной поверхности в окрестности точки посадки. Технический результат при использовании заявляемого изобретения заключается в повышении безопасности полетов путем обеспечения автоматической посадки, что достигается увеличением информативности определения местоположения вертолета относительно земной поверхности за счет использования двух цифровых фотокамер и по меньшей мере четырех узконаправленных лазерных источников излучения, установленных на стабилизированной в горизонте платформе, и вычислителя, алгоритм которого не содержит упрощений, приводящих к методическим погрешностям измерений.
Технический результат изобретения достигается тем, что в способе определения параметров положения вертолета при посадке, основанном на регистрации излучения наземных световых контрастов, обработке их оцифрованного изображения и вычислении координат местоположения летательного аппарата, на поверхности земли формируют искусственные световые контрасты путем облучения, по меньшей мере, четырьмя узконаправленными лазерными источниками излучения, установленными на платформе, стабилизированной в горизонтальной плоскости, при этом луч одного из источников вертикален, а три других образуют грани правильной пирамиды с осью симметрии, совпадающей с вертикалью, регистрируют излучение каждого из искусственных световых контрастов посредством двух разнесенных цифровых фотокамер, установленных на стабилизированной платформе, осуществляют обработку оцифрованных изображений, снимаемых с фоточувствительных матриц цифровых фотокамер для определения координат изображений искусственных световых контрастов, вычисляют координаты искусственных световых контрастов в системе координат, связанной с стабилизированной платформой, вычисляют углы ориентации земной поверхности относительно горизонтальной системы координат, вычисляют высоту полета вертолета, определяют углы, характеризующие неровность земной поверхности, оценивают горизонтальность и неровность земной поверхности, делают вывод о возможности посадки и осуществляют посадку вертолета.
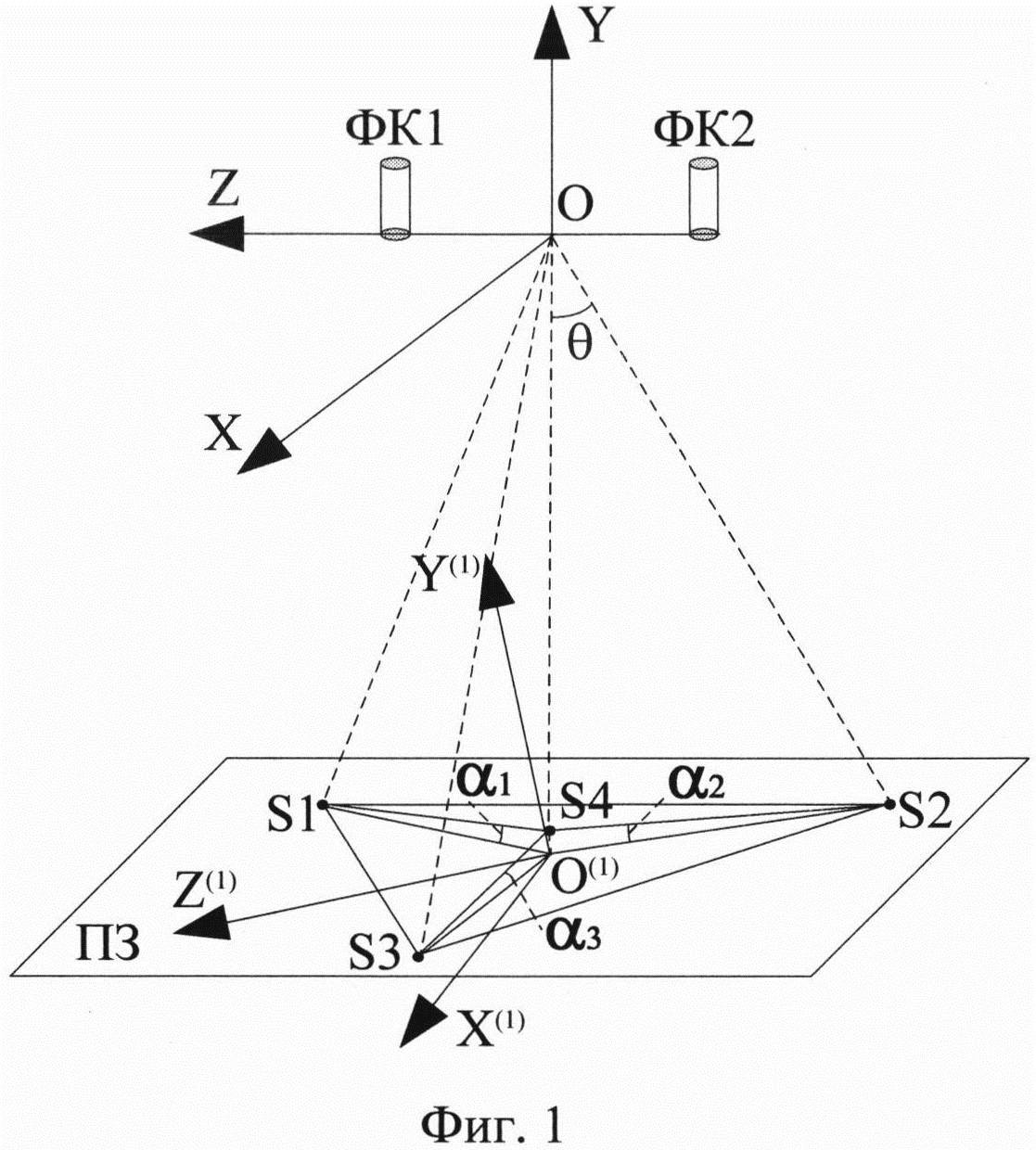
Сущность изобретения поясняется фиг. 1, где представлено взаимное расположение сформированных на поверхности земли (ПЗ) искусственных световых контрастов, горизонтальной системы координат OXYZ, связанной с стабилизированной в горизонте платформой, установленной на борту вертолета, системы координат O(1)X(1)Y(1)Z(1), связанной с ПЗ.
Сущность изобретения обусловлена выполнением следующих действий:
определение координат изображений искусственных световых контрастов на фоточувствительных матрицах двух цифровых фотокамер;
вычисление координат искусственных световых контрастов в системе координат, связанной с стабилизированной платформой;
вычисление значений углов ориентации земной поверхности относительно горизонтальной системы координат;
вычисление высоты полета вертолета;
вычисление углов, характеризующих неровность земной поверхности, величина которых позволяет обоснованно принять решение о возможности (невозможности) посадки;
выполнение автоматической посадки по вычисленным сигналам высоты h и углов υ, β.
На фиг. 1 показана схема измерения положения вертолета над земной поверхностью, где обозначены:
ФК1, ФК2 - фотокамеры системы технического зрения (СТЗ);
OXYZ - горизонтальная система координат, связанная с стабилизированной платформой;
S1, S2, S3, S4 - четыре искусственных световых контраста на поверхности земли (ПЗ);
O(1)X(1)Y(1)Z(1) - система координат, связанная с ПЗ, плоскость O(1)Х(1)Z(1) проходит через точки S1, S2, S3;
α1, α2, α3 - углы, описывающие неровность между поверхностью земли (фиг. 1), α1 - угол между вектором  и плоскостью ПЗ, α2 - угол между вектором
и плоскостью ПЗ, α2 - угол между вектором  и плоскостью ПЗ, α3 - угол между вектором
и плоскостью ПЗ, α3 - угол между вектором  и плоскостью ПЗ.
и плоскостью ПЗ.
На фиг. 2 показано угловое положение земной поверхности относительно стабилизированной платформы, где обозначены:
угол β - разворота плоскости ПЗ вокруг оси OY;
угол υ - разворота плоскости ПЗ вокруг оси OZ(1).
Способ реализуется следующим образом.
Поскольку система технического зрения, работающая в пассивном режиме, не может обеспечить измерение положения ЛА относительно земной поверхности типа заснеженное (ледяное, песчаное) поле без естественных контрастов, а также в плохих погодных или ночных условиях, поэтому для обеспечения работоспособности системы в любых условиях необходимо дополнить СТЗ системой из по меньшей мере четырех узконаправленных лазерных излучателей (фиг. 1), расположенных в точке О, формирующих на земной поверхности четыре разнесенных в зависимости от высоты, наклона и неровности поверхности искусственных световых пятен (контрастов) S1, S2, S3, S4.
Решение задачи измерения высоты вертолета, углов наклона земной поверхности относительно местной вертикали и углов, характеризующих кривизну поверхности (неровность) в окрестности точки посадки, достигается путем использования искусственных световых контрастов, сформированных посредством четырех бортовых лазерных источников излучения вместо естественных оптически контрастных точек на земной поверхности.
Поскольку измерение параметров положения вертолета по оптическим контрастам, связанным с вертолетом, приведет к методическим погрешностям измерений, обусловленным его эволюциями, то используется стабилизация углового положения как системы лазерных источников излучения, так и системы технического зрения в горизонтальной плоскости, используя для этого двухрамочный карданов подвес, управляемый по сигналам угла крена и тангажа.
Направим лазерные излучатели таким образом, чтобы узконаправленные лучи OS1, OS2, OS3 совпали с гранями правильной треугольной пирамиды, а луч OS4 проходил по ее оси симметрии и совпадал с местной вертикалью за счет работы карданова подвеса. Чтобы изображения искусственных световых контрастных точек, образовавшихся на земной поверхности, всегда находились в поле зрения фотокамер СТЗ необходимо, чтобы выполнялось следующее условие θ<θфк (θфк - угол поля зрения фотокамеры, θ - угол отклонения лучей OS1, OS2, OS3 от вертикали).
Измерения координат контрастных точек выполняются посредством СТЗ

где Xλυ, Zλυ - координаты изображения контрастной точки на первой и второй фоточувствительных матрицах, λ=1, 2 - номер фоточувствительной матрицы, υ=1…4 - номер точки Sυ, В - расстояние между центрами фоточувствительных матриц, F - фокусное расстояние объективов телекамер.
Чтобы получить аналитические выражения, описывающие взаимное положение системы координат OXYZ и плоскости ПЗ, введем в рассмотрение систему координат O(1)X(1)Y(1)Z(1), плоскость O(1)X(1)Z(1) которой совпадает с плоскостью ПЗ. Ось O(1)Z(1) горизонтальна, а O(1)Х(1) совпадает с линией наискорейшего спуска. Опишем положение вектора нормали к плоскости ПЗ посредством угла β - разворота плоскости ПЗ вокруг оси OY и угла υ - разворота плоскости ПЗ вокруг оси OZ(1). Таким образом, взаимное положение систем координат O(1)X(1)Y(1)Z(1) и OXYZ описывается матрицей направляющих косинусов следующего вида

где орты систем координат связаны известным соотношением

Вектор нормали N к плоскости S1S2S3 в системе координат OXYZ записывают в виде векторного произведения сторон S1S2 и S1S3 треугольника.

где Nx=(y2-yl)(z3-z1)-(y3-y1)(z2-z1), Ny=(z2-z1)(x3-x1)-(х2-x1)(z3-zl), Nz=(x2-x1)(y3-y1)-(y2-y1)(x3-x1), а его модуль  .
.
С помощью скалярного произведения единичных векторов  определяют наклон υ земной поверхности в точке посадки
определяют наклон υ земной поверхности в точке посадки

где 
Из соотношений (2) и (3) выразим вектор j(1)=-isinυcosβ+jcosυ+ksinυsinβ. Учитывая, что

получим
 , а
, а 
Окончательные выражения для углов β и υ имеют следующий вид


Оценивают горизонтальность земной поверхности путем проверки неравенства

где υзад - допустимое значение наклона земной поверхности, при котором обеспечивается безопасная посадка.
Для измерения высоты полета ЛА определяют расстояние до точки S4, это связано с тем, что система лазерных излучателей стабилизируется в горизонте по углу крена и тангажа, поэтому линия OS4 совпадает с местной вертикалью

Для определения углов α1=<S4S1O(1), α2=<S4S2O(1), α3=<S4S3O(1) необходимо найти скалярные произведения j(1)⋅S1S4, j(1)⋅S2S4, j(1)⋅S3S4,

Выразим орт j(1) из соотношения (4)
Векторы S1S4, S2S4, S3S4 выразим следующим образом
SlS4=i(xl-x4)+j(y1-y4)+k(z1-z4),
S2S4=i(x2-x4)+j(y2-y4)+k(z2-z4),
S3S4=i(x3-x4)+j(y3-y4)+k(z3-z4).
Выражают углы α1, α2, α3,
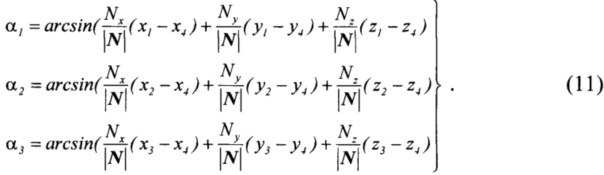
Разброс значений этих углов позволяет оценивать неровность земной поверхности в пределах треугольника S1S2S3 путем проверки неравенств

где αзад - допустимое значение угла α, обеспечивающее безопасную посадку.
При выполнении неравенств делают вывод о возможности посадки.
Таким образом, посадка ЛА (вертолета) в автоматическом режиме должна осуществляться по сигналам h, β:
сигнал высоты используется для снижения до h=0;
сигнал β (угол ориентации линии OO1 наискорейшего спуска земной поверхности относительно продольной оси ЛА), при посадке на наклонную поверхность при υ≠0 вертолет целесообразно расположить вдоль линии наискорейшего спуска т.е β→0 (фиг. 3). При υ=0 сигнал β теряет смысл.
Измерение координат оптически контрастных точек при использовании инфракрасного диапазона лазерных излучателей в одном из окон прозрачности атмосферы (например 1.3 мкм или 1.55 мкм) посредством стереопары ФК1 и ФК2 обеспечивает определение положения ЛА как в сложных метеоусловиях, так и в любое время суток, не демаскируя ЛА в видимой части спектра.
Способ обеспечения посадки вертолета, основанный на регистрации излучения световых контрастов, обработке их оцифрованного изображения и вычислении координат местоположения летательного аппарата (ЛА), отличающийся тем, что на поверхности земли формируют искусственные световые контрасты путем облучения, по меньшей мере, четырьмя узконаправленными лазерными источниками излучения, установленными на платформе, стабилизированной в горизонтальной плоскости, при этом луч одного из источников вертикален, а три других образуют грани правильной пирамиды с осью симметрии, совпадающей с вертикалью, регистрируют излучение каждого из искусственных световых контрастов посредством двух разнесенных цифровых фотокамер, установленных на стабилизированной платформе, осуществляют обработку оцифрованных изображений, снимаемых с фоточувствительных матриц цифровых фотокамер, для определения координат изображений искусственных световых контрастов, вычисляют координаты искусственных световых контрастов в системе координат, связанной с стабилизированной платформой, вычисляют углы ориентации земной поверхности относительно горизонтальной системы координат, вычисляют высоту полета вертолета, определяют углы, характеризующие неровность земной поверхности, оценивают горизонтальность и неровность земной поверхности, делают вывод о возможности посадки и осуществляют посадку вертолета.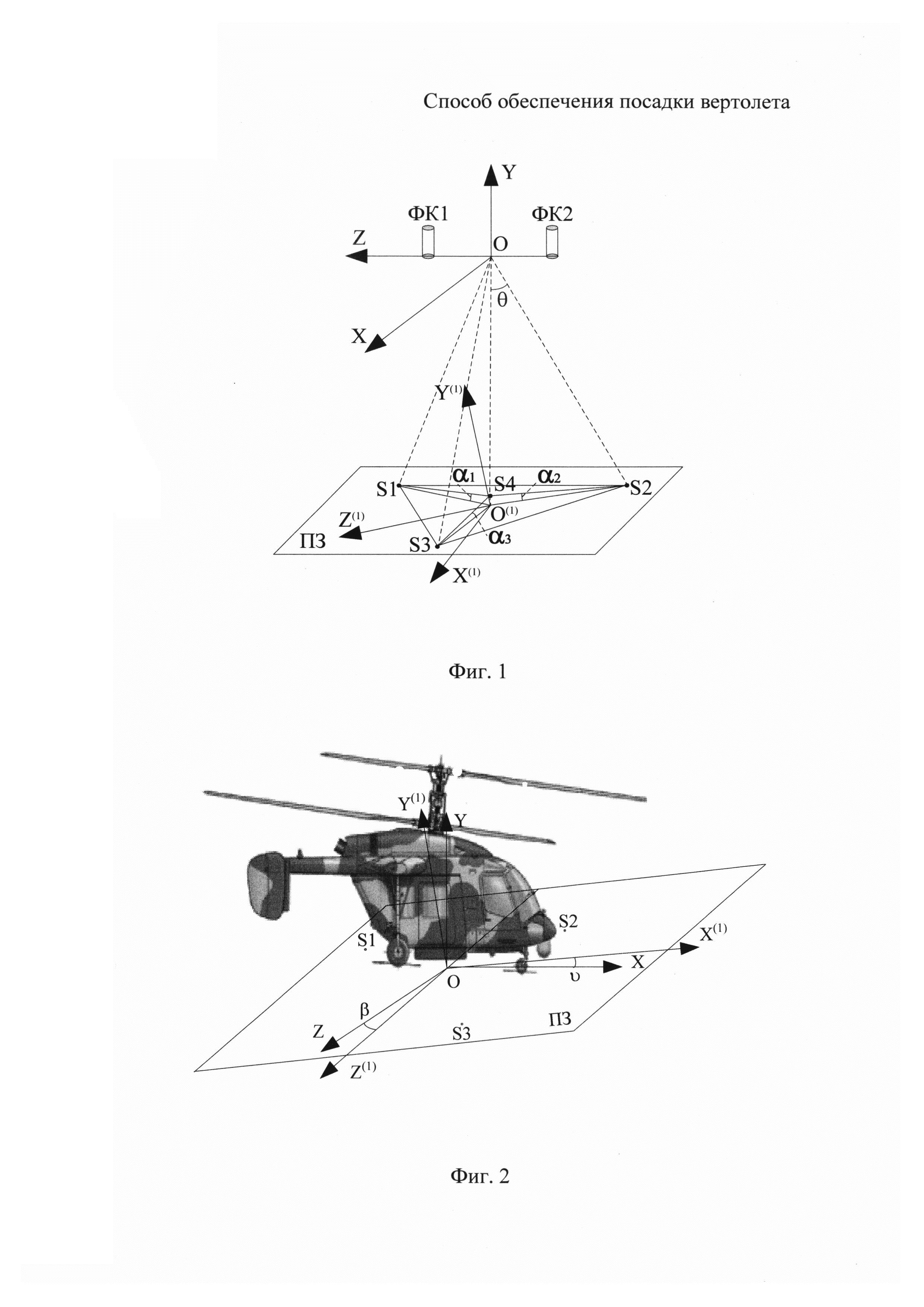
Способ радиолокации
Способ комплексирования цифровых полутоновых изображений
Устройство компенсации активных помех
Способ ранжирования воздушных целей
Устройство маскировки объектов
Авиационный тренажер
Способ определения координат источника радиоизлучения
Частотный дальномер
Способ определения пространственной ориентации луча излучения лазерного локационного средства
Способ определения диэлектрической проницаемости и толщины многослойных диэлектрических покрытий на металле в диапазоне свч
Способ определения координат летательного аппарата относительно взлетно-посадочной полосы
Способ логического парного мониторинга неоднородных избыточных технических систем и устройство для его реализации

