Результат интеллектуальной деятельности: СПОСОБ СБОРКИ ПОДВИЖНОГО СТОЛА МАНИПУЛЯТОРА С ДВУМЯ ШАГОВЫМИ ДВИГАТЕЛЯМИ
Вид РИД
Изобретение
Предложение относится к области машиностроения и предназначено для автоматизации процесса перемещения изделий, в частности при электроннолучевой сварке.
Известен способ сборки электромеханического привода линейного перемещения с шаговым двигателем вращения (см. заявку РФ №93021003 от 22.04.1993, МПК В23Р 19/00).
Недостатком известного способа является его сложность и невозможность использования в двухдвигательных манипуляторах.
Также известен подвижный стол манипулятора, содержащий укрепленные в корпусе с возможностью вращения вокруг осей два параллельно расположенных винта, гайки которых жестко закреплены на поступательно движущейся платформе, несущей изделие, один конец каждого винта связан с выходным валом шагового двигателя, обмотки которого подключены к выходам многоканального блока управления (см. патент РФ на полезную модель №143440).
Недостатком данного устройства является то, что его сборка представляет большую сложность. Это связано с тем, что винты, связанные с валами шаговых двигателей, для обеспечения требуемой точности и исключения заклинивания передач винт-гайка, должны вращаться синхронно и синфазно. Синхронность и синфазность вращения винтов обеспечивается коммутацией фаз двигателей от одного коммутатора. Однако при этом установленные в корпусе винты, гайки которых жестко связаны с поступательно движущейся платформой, также должны быть установлены синфазно по отношению друг другу и валам шаговых двигателей. Даже при тщательной сборке обеспечить с требуемой точностью синфазность четырех подвижных элементов манипулятора практически невозможно.
Техническая задача, решаемая предлагаемым способом, состоит в упрощении процесса сборки манипулятора и обеспечении необходимой точности работы механизма. Технический эффект, используемый при решении поставленной технической задачи, заключается в обеспечении синфазности положений ходовых винтов, гаек и валов шаговых двигателей и достигается тем, что способ сборки манипулятора, выполненного в виде корпуса с установленными в нем с возможностью вращения двумя ходовыми винтами, гайки которых связаны с подвижной платформой, предназначенной для размещения изделия и выполненной с возможностью поступательного перемещения по упомянутым винтам, концы которых соединены с валами шаговых двигателей с обмотками, подключенными к выходам многоканального блока управления, характеризуется тем, что фиксируют упомянутые двигатели относительно корпуса, в корпус устанавливают ходовые винты с расположенными на них гайками, при этом подвижную платформу размещают на ходовых винтах вдоль одного из краев корпуса параллельно ему, а упомянутые гайки располагают напротив центра подвижной платформы без закрепления на ней, в этом положении упомянутых элементов шаговые двигатели подключают к упомянутому блоку управления с возбуждением их одноименных фаз для синфазного углового положения ходовых винтов, при этом жестко скрепляют ходовые винты с валами шаговых двигателей, а упомянутые гайки - с подвижной платформой.
Подвижную платформу перемещают (как правило, вручную) к одному (любому краю) корпуса манипулятора и устанавливают параллельно ему. В этом положении подвижной платформы к ней перемещают (путем поворота ходовых винтов) гайки, располагая их в центре платформы, но не закрепляя их на ней. В таком положении подвижной части механизма подключают шаговые двигатели к блоку управления и возбуждают их одноименные фазы, что обеспечивает синфазность положений винтов, гаек и валов шаговых двигателей. После указанной процедуры при возбужденных шаговых двигателях жестко закрепляют ходовые винты с валами шаговых двигателей, а корпуса гаек - с подвижной платформой. При указанной последовательности сборки манипулятора исключаются перекосы в его винтовых передачах, уменьшается трение в них и повышается точность передачи движения от шаговых двигателей к подвижной платформе.
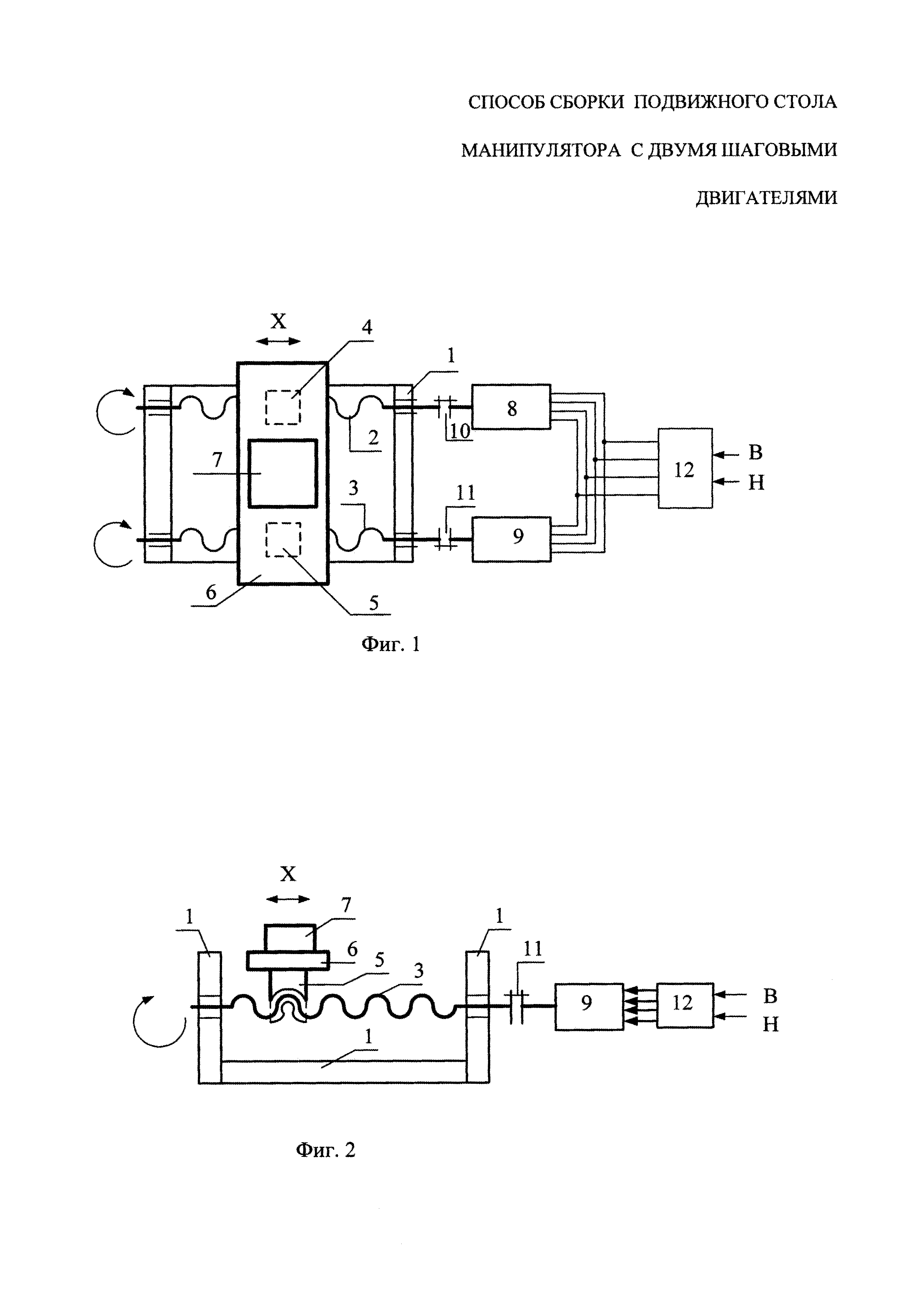
Способ сборки поясняется чертежами, где на фиг. 1 приведена схема подвижной платформы в плане и функциональная схема устройства управления применительно к четырехфазным шаговым двигателям, а на фиг. 2 - схематичное расположение элементов подвижной платформы на виде спереди.
Манипулятор содержит укрепленные в корпусе 1 с возможностью вращения вокруг оси ходовые винты 2 и 3, гайки 4, 5 которых жестко закреплены на поступательно движущейся платформе 6, несущей изделие 7. Одни концы винтов 2 и 3 связаны с выходными валами шаговых двигателей 8 и 9 посредством соединительных муфт 10, 11. Обмотки шаговых двигателей подключены к одноименным выходам многоканального блока управления 12, снабженного входами В и Н выбора направления движения.
В настоящем предложении рассматривается манипулятор, в котором платформа 6 перемещается в одном направлении (по одной координате X) без направляющих, роль которых выполняют винты 2 и 3. При необходимости создания двухкоординатного манипулятора на подвижную платформу 6 одной координаты (например, координаты X) может быть установлен со смещением на произвольный угол относительно основного (как правило, 90°) дополнительный корпус с винтами, гайками и приводными двигателями, аналогичными основным. В этом случае указанные выше дополнительные элементы будут образовывать вторую координату (например, Y), что позволяет построить двухкоординатный манипулятор. Сборка второй координаты двухкоординатного манипулятора должна осуществляться таким же способом, как и первой.
Предлагаемый способ сборки манипулятора пригоден при использовании любых видов винтовых передач. Но для прецизионных подвижных платформ целесообразно использовать шариковые винтовые передачи, которые обладают высоким КПД и высокой точностью, что позволяет создавать высокоточные и быстродействующие механизмы перемещения изделий, работающие как при атмосферном давлении, так и в вакууме.
Особенности предлагаемого способа сборки манипулятора с шаговыми двигателями обусловлены тем фактором, что при возбуждении обмоток шагового двигателя (даже при отсутствии вращения) на его валу создается так называемый статический момент, который фиксирует его положение.
Возбуждение одноименных обмоток шаговых двигателей 8 и 9, подключенных к выходам общего блока управления 12, обеспечивает синфазное угловое положение обоих винтов 2 и 3. Если при этом (например, вручную) переместить платформу 6 к одному краю корпуса 1 (любому), что обеспечит ее перпендикулярность винтам и одинаковое расположение в корпусе 1, а путем поворота винтов переместить гайки 4, 5 приблизительно в середину платформы, то будет обеспечена синфазность всех подвижных элементов манипулятора. В этом их состоянии (при возбужденных шаговых двигателях) жестко соединяют гайки 4, 5 с платформой 6, а винты 2, 3 с валами шаговых двигателей 8, 9 с помощью муфт 10, 11.
При такой последовательности проведения операций обеспечивается высокая точность сборки манипулятора с шаговыми двигателями и исключаются перекосы в его поступательно движущихся элементах.
Предлагаемый способ сборки может быть использован не только применительно к манипуляторам с двумя шаговыми двигателями, но и для манипуляторов с одним шаговым двигателем.
Способ сборки манипулятора, выполненного в виде корпуса с установленными в нем с возможностью вращения двумя ходовыми винтами, гайки которых связаны с подвижной платформой, предназначенной для размещения изделия и выполненной с возможностью поступательного перемещения по упомянутым винтам, концы которых соединены с валами шаговых двигателей с обмотками, подключенными к выходам многоканального блока управления, характеризующийся тем, что фиксируют упомянутые двигатели относительно корпуса, в корпус устанавливают ходовые винты с расположенными на них гайками, при этом подвижную платформу размещают на ходовых винтах вдоль одного из краев корпуса параллельно ему, а упомянутые гайки располагают напротив центра подвижной платформы без закрепления на ней, в этом положении упомянутых элементов шаговые двигатели подключают к упомянутому блоку управления с возбуждением их одноименных фаз для синфазного углового положения ходовых винтов, при этом жестко скрепляют ходовые винты с валами шаговых двигателей, а упомянутые гайки - с подвижной платформой.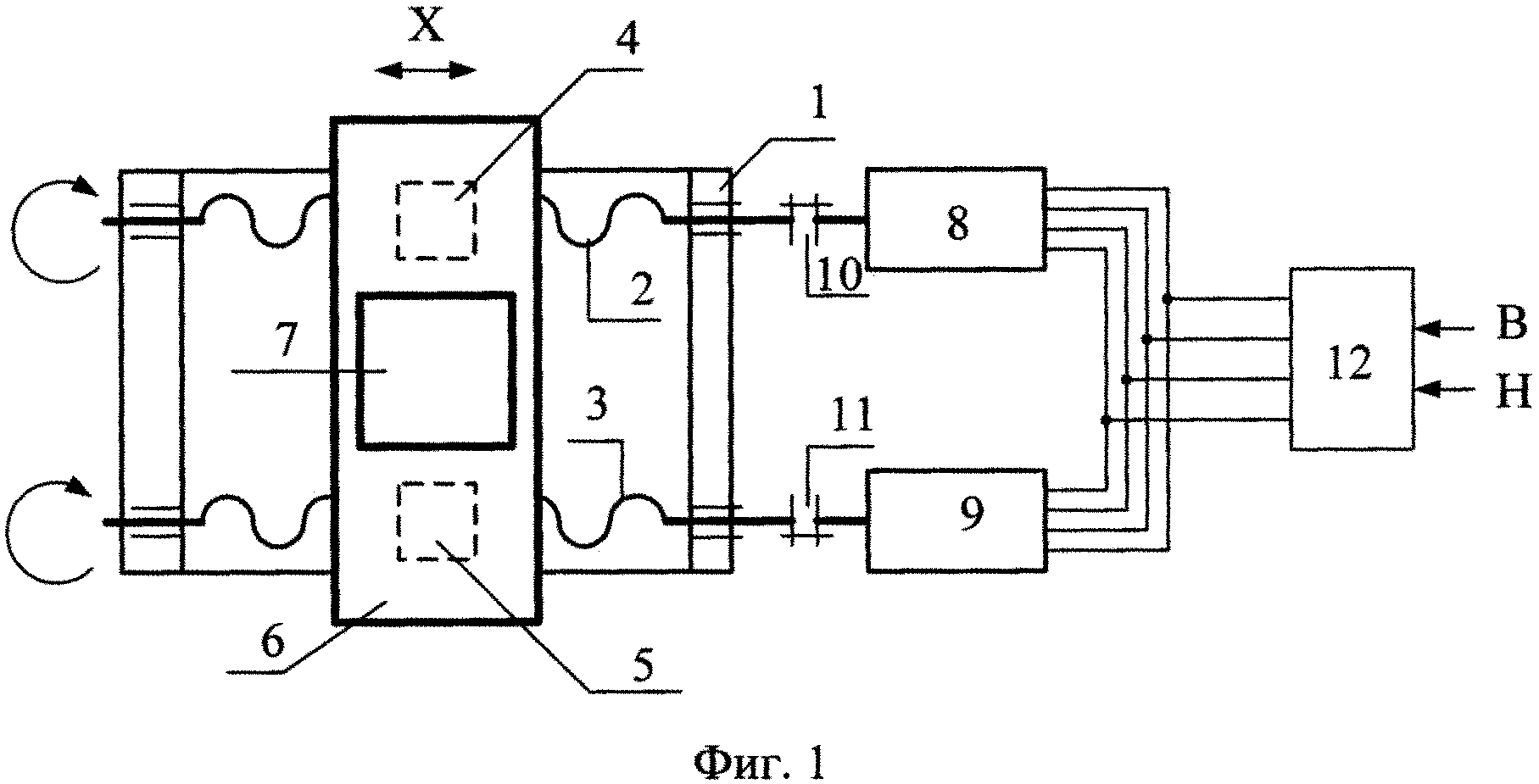
Цифровой некогерентный демодулятор четырехпозиционных сигналов с относительной фазовой манипуляцией
Установка для компримирования пара низкого потенциала
Исполнительный агрегат электропривода
Устройство для обогрева криогенного аппарата
Способ защиты от эксцентриситета ротора электрической машины переменного тока
Способ регулирования координат взаимосвязанных электроприводов
Способ защиты от эксцентриситета ротора электрической машины переменного тока
Устройство для выращивания монокристаллов
Исполнительный агрегат электропривода
Многодвигательный привод поворотной платформы
Устройство для управления процессом электронно-лучевой сварки
Вакцина инактивированная сорбированная против ящура типа а
Штамм о n2344/монголия/2017 вируса ящура aphtae epizooticae типа о для изготовления биопрепаратов для диагностики и специфической профилактики ящура типа о
Способ стабилизации скорости подачи присадочной проволоки и устройство для его реализации

