Результат интеллектуальной деятельности: Способ регулирования координат взаимосвязанных электроприводов
Вид РИД
Изобретение
Изобретение относится к области электротехники и может быть использовано для управления взаимосвязанными электроприводами с индивидуальными силовыми преобразователями и упругими механическими передачами с зазорами от электродвигателей к общей массе, применяемыми в опорно-поворотных устройствах, металлообрабатывающих станках, механизмах металлургического производства и других системах управления движением, требующих высокого быстродействия и точности регулирования координат.
Известен способ управления взаимосвязанными электроприводами с упругими звеньями и зазорами в кинематических передачах по принципу электромеханического распора (Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. Л.: Энергоиздат, Ленинградское отделение, 1982, с. 226-230), согласно которому токи электроприводов формируют силовыми преобразователями, индивидуальными для каждого электропривода, моменты распора и движущие моменты электроприводов формируют контурами регулирования электромагнитных моментов, индивидуальными для каждого электропривода, а регулирование целевой координаты общей массы осуществляют контуром, общим для всех электроприводов, при этом динамику регулирования моментов распора и движущих моментов каждого электропривода корректируют последовательными регуляторами, затем динамику и точность регулирования целевой координаты корректируют последовательным регулятором.
Недостатком данного технического решения является существенное ухудшение показателей точности и быстродействия регулирования координат при снижении жесткости кинематических передач.
Известен также способ управления взаимосвязанными электроприводами с упругими звеньями и зазорами в кинематических передачах по принципу электромеханического распора (Иванков В.А. Разработка и исследование цифровой системы контурно-позиционного управления редукторными электроприводами многоцелевых металлорежущих станков. Автореферат на соискание ученой степени кандидата технических наук. ГОУ ВПО «Ивановский государственный энергетический университет, 2008.), согласно которому токи электроприводов формируют силовыми преобразователями, индивидуальными для каждого электропривода, моменты распора и движущие моменты электроприводов формируют контурами регулирования моментов упругости кинематических передач, индивидуальными для каждого электропривода, а регулирование целевой координаты общей массы осуществляют контуром, общим для всех электроприводов, при этом динамику регулирования моментов распора и движущих моментов каждого электропривода корректируют параллельными регуляторами в зависимости от координат силовых преобразователей, электрических двигателей и кинематических передач, а динамику регулирования целевой координаты корректируют параллельным регулятором в зависимости от координат силовых преобразователей, электрических двигателей, кинематических передач и общей массы, причем темп регулирования движущих моментов и моментов распора устанавливают единым и выше темпа регулирования целевой координаты.
Недостатками данного технического решения являются пониженное быстродействие контура регулирования целевой координаты, сложность реализации параллельных регуляторов, а также низкая точность регулирования целевой координаты и стабилизации моментов распора при движении общей массы и при воздействии момента нагрузки.
Наиболее близким по технической сущности к заявляемому изобретению является способ управления взаимосвязанными электроприводами (патент RU на изобретение №2316886, опубл. 10.02.2008, МПК Н02Р 5/46), согласно которому токи электроприводов формируют силовыми преобразователями, индивидуальными для каждого электропривода, моменты распора и движущие моменты электроприводов формируют контурами регулирования моментов упругости кинематических передач, индивидуальными для каждого электропривода, а регулирование целевой координаты общей массы осуществляют контуром, общим для всех электроприводов, при этом динамику регулирования моментов распора и движущих моментов каждого электропривода корректируют параллельными регуляторами в зависимости от координат силовых преобразователей, электрических двигателей и кинематических передач, в том числе от интегральных составляющих моментов упругости кинематических передач, а динамику и точность регулирования целевой координаты корректируют параллельным регулятором в зависимости от координат общей массы, в том числе от интегральной составляющей целевой координаты, причем темп регулирования движущих моментов и моментов распора устанавливают единым и выше темпа регулирования целевой координаты.
Недостатками настоящего технического решения являются пониженное быстродействие контура регулирования целевой координаты из-за наличия некомпенсированной инерционности, сложность реализации параллельного регулятора для повышения быстродействия регулирования целевой координаты, а также многократное завышение темпа регулирования моментов распора и движущих моментов электроприводов, что ведет к увеличению динамических нагрузок на электрические двигатели.
Технической задачей предлагаемого изобретения является повышение быстродействия и точности при регулировании координат взаимосвязанных электроприводов с упругими звеньями и зазорами в кинематических передачах по принципу электромеханического распора с астатической стабилизацией моментов распора.
Технический результат заключается в повышении производительности машин и механизмов, а также повышении качества выполнения движений.
Это достигается тем, что в известном способе регулирования координат взаимосвязанных электроприводов с упругими звеньями и зазорами в кинематических передачах по принципу электромеханического распора, включающем формирование токов, моментов распора и движущих моментов электроприводов и регулирование целевой координаты общей массы контуром, общим для всех электроприводов, причем темп регулирования движущих моментов и моментов распора устанавливают единым и выше темпа регулирования целевой координаты, формирование токов каждого электропривода осуществляют контурами регулирования токов, индивидуальными для каждого электропривода, при этом динамику регулирования токов корректируют последовательными регуляторами, затем формирование моментов распора и движущих моментов электроприводов осуществляют внешними и внутренними контурами регулирования моментов упругости кинематических передач, индивидуальными для каждого электропривода, при этом динамику регулирования моментов распора и движущих моментов каждого электропривода корректируют параллельными регуляторами внутренних контуров в зависимости от координат электрических двигателей и кинематических передач, затем динамику формирования моментов распора и движущих моментов каждого электропривода корректируют последовательными регуляторами внешних контуров, далее динамику и точность регулирования целевой координаты корректируют последовательным регулятором и параллельным регулятором контура регулирования целевой координаты в зависимости от координат общей массы.
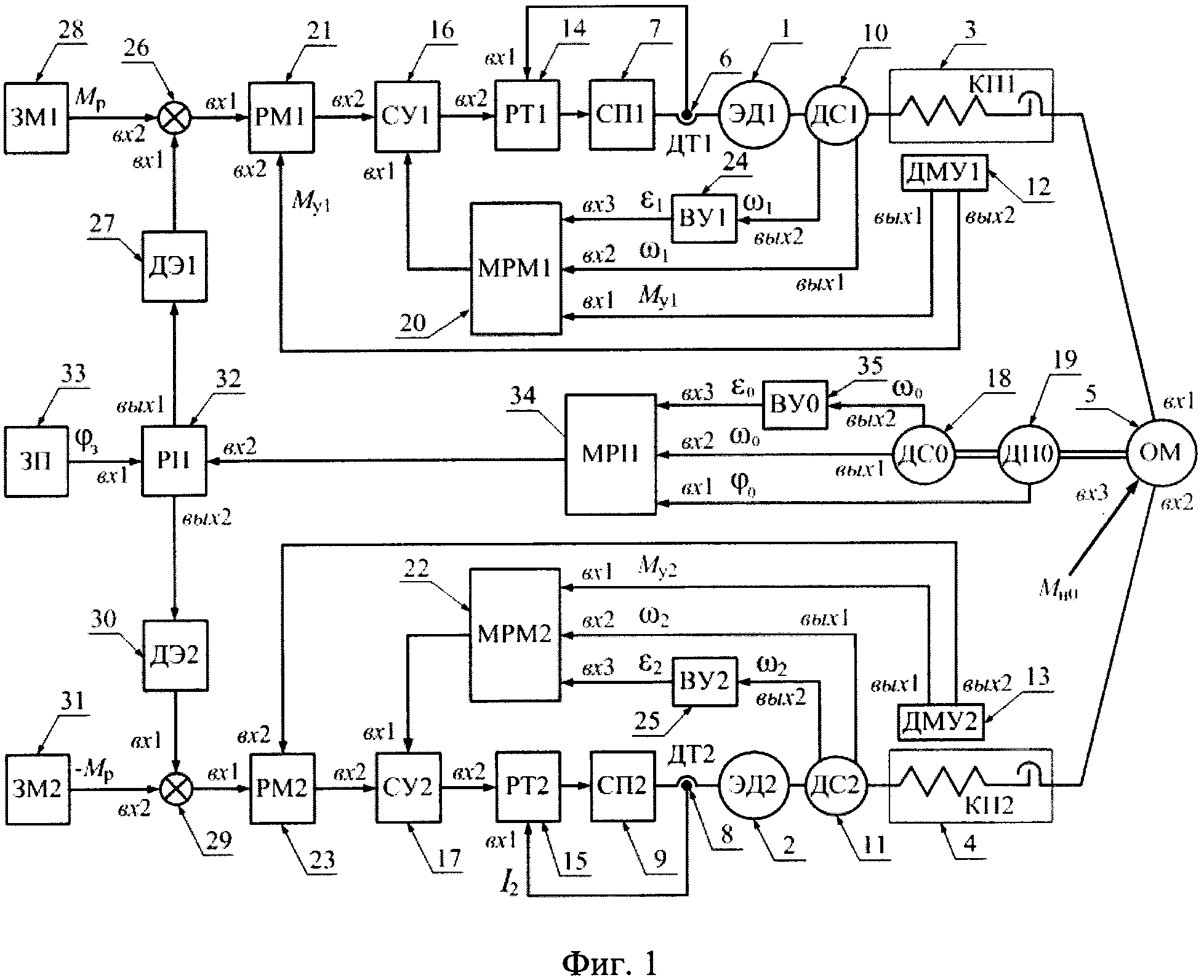
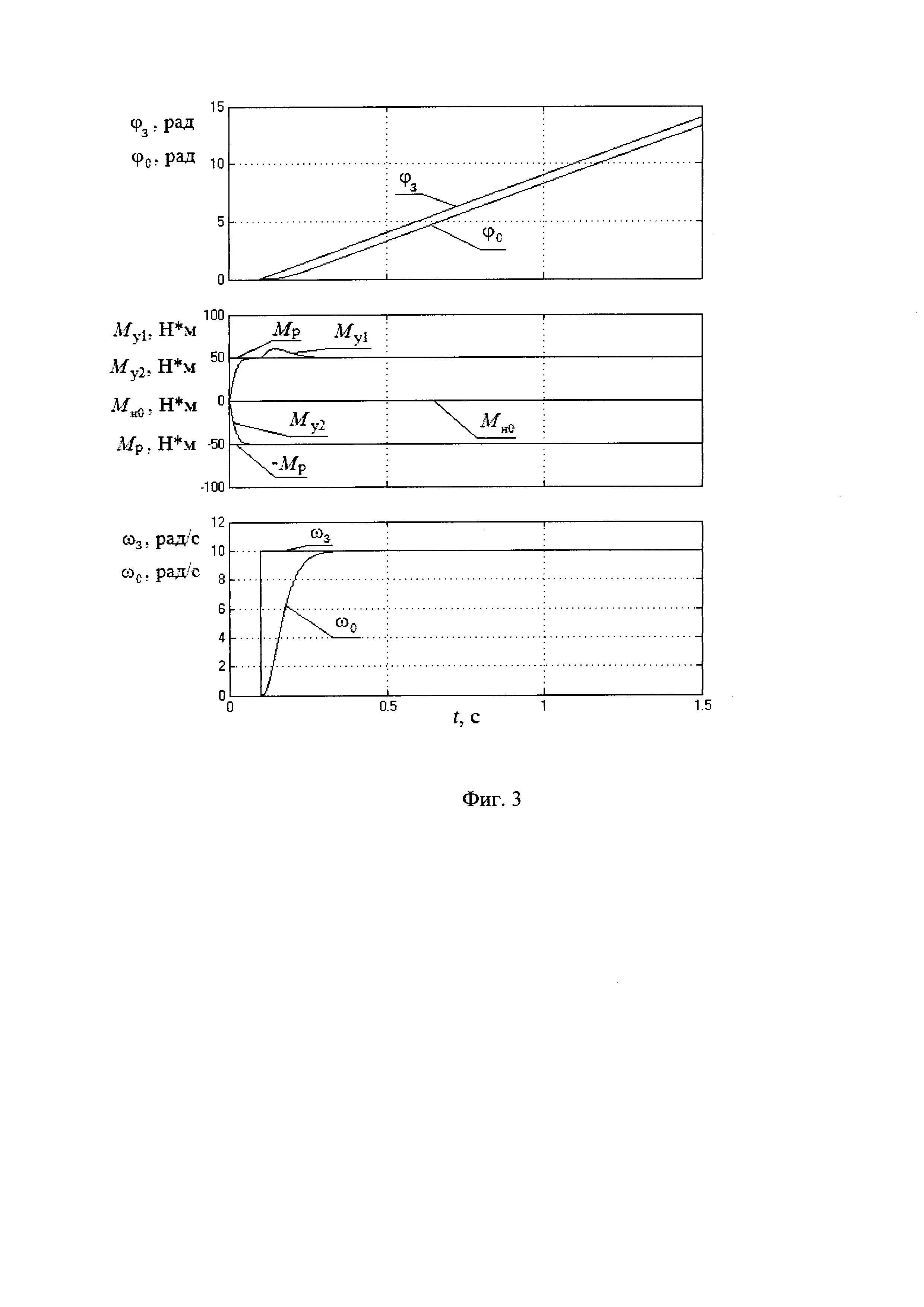
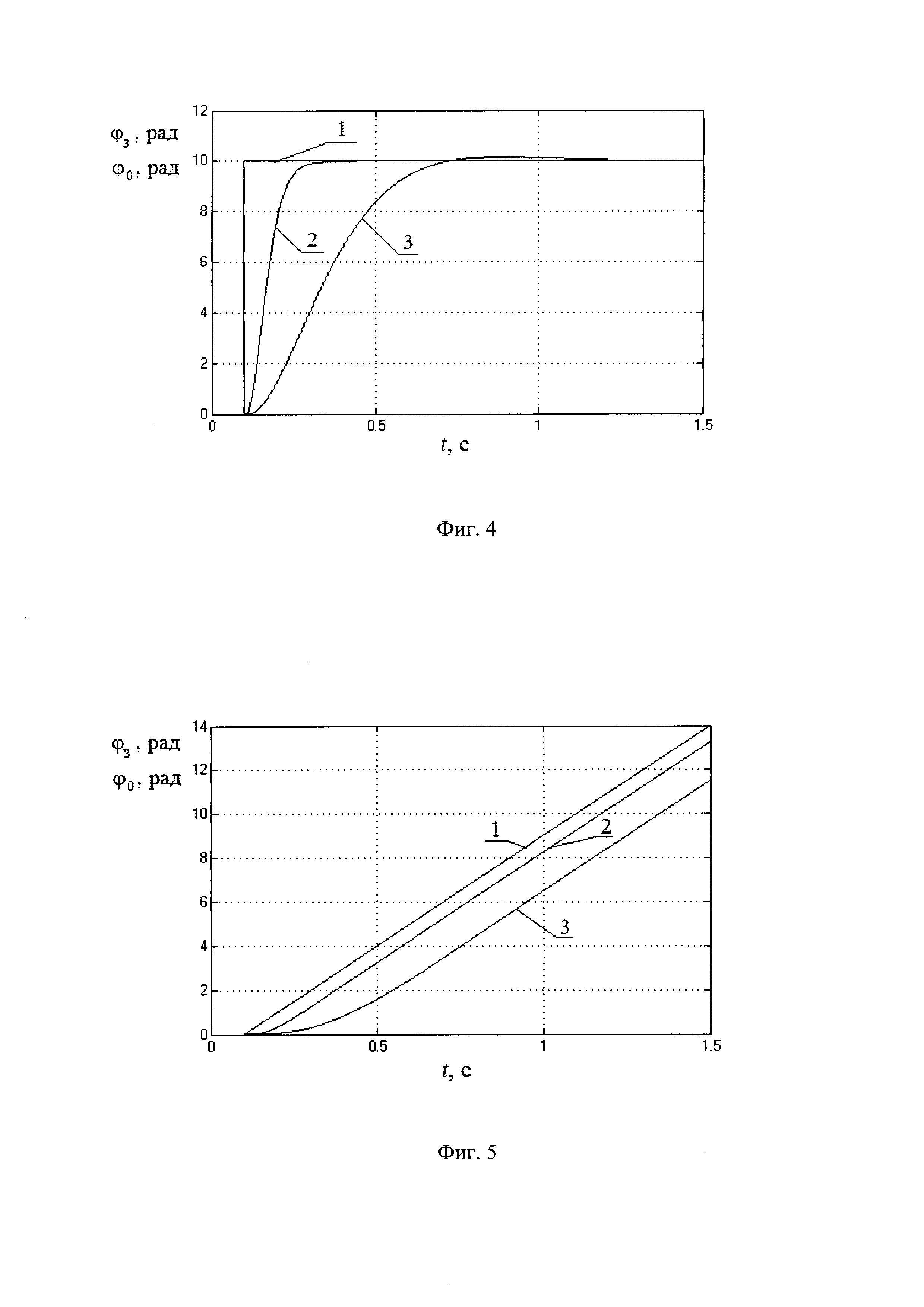
Сущность предлагаемого технического решения поясняется чертежами, где на фиг. 1 изображена функциональная схема системы регулирования координат взаимосвязанных электроприводов, реализующей заявленный способ регулирования координат взаимосвязанных электроприводов, на фиг. 2 представлены диаграммы изменения основных координат электроприводов при пуске, приложении нагрузки, снятии нагрузки и реверсе, на фиг. 3 представлены диаграммы изменения основных координат электроприводов при отработке движения общей массы с постоянной скоростью, на фиг. 4 показаны диаграммы изменения положения общей массы при отработке скачка задающего воздействия при предложенном способе регулирования координат взаимосвязанных электроприводов с повышенным быстродействием и точностью и способе по прототипу, на фиг. 5 представлены диаграммы изменения положения общей массы при ее движении с постоянной скоростью при предложенном способе регулирования координат взаимосвязанных электроприводов с повышенным быстродействием и точностью и способе по прототипу.
На графических изображениях приняты следующие обозначения координат электроприводов: I1, I2, ω1, ω2, ε1, ε2, Му1, Му2 - токи, скорости вращения и ускорения электрических двигателей, моменты упругости кинематических передач первого и второго электроприводов соответственно; ϕз - заданное положение общей массы; ωз - заданная скорость движения общей массы; ϕ0, ω0, ε0 - угловое положение, скорость движения и ускорение общей массы; Мн0 - момент нагрузки, приложенный к общей массе; Мр - момент распора. Целевой координатой регулирования движения общей массы является ее положение ϕ0.
Функциональная схема системы регулирования координат взаимосвязанных электроприводов содержит электрический двигатель первого электропривода 1 (ЭД1) и электрический двигатель второго электропривода 2 (ЭД2), при этом электрический двигатель первого электропривода 1 связан первой упругой кинематической передачей 3 (КП1), содержащей зазор, с первым входом общей массы 5 (ОМ), электрический двигатель второго электропривода 2 связан второй упругой кинематической передачей 4 (КП2), содержащей зазор со вторым входом общей массы 5. Силовая цепь электрического двигателя первого электропривода 1 содержит первый датчик тока 6 (ДТ1), подключенный к выходу первого силового преобразователя 7 (СП1). Силовая цепь электрического двигателя второго электропривода 2 содержит второй датчик тока 8 (ДТ2), подключенный к выходу второго силового преобразователя 9 (СП2). На валу электрического двигателя первого электропривода 1 расположен первый датчик скорости 10 (ДС1), на валу электрического двигателя второго электропривода 2 расположен второй датчик скорости 11 (ДС2). На первой упругой кинематической передаче 3 расположен первый датчик момента упругости кинематической передачи 12 (ДМУ1), на второй упругой кинематической передаче 4 расположен второй датчик момента упругости кинематической передачи 13 (ДМУ2). Вход первого силового преобразователя 7 соединен с выходом регулятора тока первого электропривода 14 (РТ1), первый вход которого соединен с первым датчиком тока 6, а второй вход соединен с выходом суммирующего усилителя внутреннего контура регулирования момента упругости кинематической передачи первого электропривода 16 (СУ1). Вход силового преобразователя 9 соединен с выходом регулятора тока второго электропривода 15 (РТ2), первый вход которого соединен со вторым датчиком тока 8, а второй вход соединен с выходом суммирующего усилителя внутреннего контура регулирования момента упругости кинематической передачи второго электропривода 17 (СУ2).
При этом элементы 6, 7, 14 образуют контур регулирования тока первого электропривода, элементы 8, 9, 15 образуют контур регулирования тока второго электропривода.
На валу общей массы 5 установлены датчик скорости общей массы 18 (ДС0) и датчик положения общей массы 19 (ДП0).
Первый вход суммирующего усилителя внутреннего контура регулирования момента упругости кинематической передачи первого электропривода 16 соединен с выходом модального регулятора момента упругости кинематической передачи первого электропривода 20 (МРМ1), а второй его вход соединен с выходом регулятора момента упругости кинематической передачи первого электропривода 21 (РМ1). Первый вход суммирующего усилителя внутреннего контура регулирования момента упругости кинематической передачи второго электропривода 17 соединен с выходом модального регулятора момента упругости кинематической передачи второго электропривода 22 (МРМ2), а второй его вход соединен с выходом регулятора момента упругости кинематической передачи второго электропривода 23 (РМ2).
Первый вход модального регулятора момента упругости кинематической передачи первого электропривода 20 соединен с первым выходом первого датчика момента упругости кинематической передачи 12, второй вход соединен с первым выходом первого датчика скорости 10, третий вход подключен к выходу первого вычислителя ускорения 24 (ВУ1), вход которого соединен со вторым выходом первого датчика скорости 10 первого электропривода.
Первый вход модального регулятора момента упругости кинематической передачи второго электропривода 22 соединен с первым выходом второго датчика момента упругости кинематической передачи 13, второй вход соединен с первым выходом второго датчика скорости 11, третий вход подключен к выходу второго вычислителя ускорения 25 (ВУ2), вход которого соединен со вторым выходом второго датчика скорости 11 второго электропривода.
Элементы 10, 12, 16, 20, 24 и контур регулирования тока первого электропривода образуют внутренний контур регулирования момента упругости кинематической передачи первого электропривода. Элементы 11, 13, 17, 22, 25 и контур регулирования тока второго электропривода образуют внутренний контур регулирования момента упругости кинематической передачи второго электропривода.
Первый вход регулятора момента упругости кинематической передачи первого электропривода 21 соединен с выходом первого сумматора 26, первый вход которого соединен с катодом первого диодного элемента 27 (ДЭ1), а второй вход подключен к задатчику момента распора положительного направления 28 (ЗМ1). Второй вход регулятора момента упругости кинематической передачи первого электропривода 21 соединен со вторым выходом первого датчика момента упругости кинематической передачи 12.
Первый вход регулятора момента упругости кинематической передачи второго электропривода 23 соединен с выходом второго сумматора 29, первый вход которого соединен с анодом второго диодного элемента 30 (ДЭ2), а второй вход подключен к задатчику момента распора отрицательного направления 31 (ЗМ2). Второй вход регулятора момента упругости кинематической передачи второго электропривода 23 соединен со вторым выходом второго датчика момента упругости кинематической передачи 13.
Элементы 12, 21 и внутренний контур регулирования момента упругости кинематической передачи первого электропривода образуют внешний контур регулирования момента упругости кинематической передачи первого электропривода. Элементы 13, 23 и внутренний контур регулирования момента упругости кинематической передачи второго электропривода образуют внешний контур регулирования момента упругости кинематической передачи второго электропривода.
Анод первого диодного элемента 27 подсоединен к первому выходу регулятора целевой координаты (положения) 32 (РП) общей массы 5, катод второго диодного элемента 30 подсоединен ко второму выходу регулятора целевой координаты (положения) 32 общей массы 5, первый вход которого соединен с выходом задатчика перемещения 33 (ЗП), а второй вход соединен с выходом модального регулятора целевой координаты (положения) 34 (МРП) общей массы 5. При этом регулятор целевой координаты 32 общей массы 5 и модальный регулятор целевой координаты 34 общей массы 5 являются общими для обоих электроприводов. Первый и второй выходы регулятора целевой координаты 32 общей массы 5 и сигналы на них идентичны.
Первый вход модального регулятора целевой координаты 34 общей массы 5 соединен с выходом датчика положения общей массы 19, второй вход соединен с первым выходом датчика скорости общей массы 18, третий вход подсоединен к выходу вычислителя ускорения общей массы 35 (ВУ0), вход которого соединен со вторым выходом датчика скорости общей массы 18. На третий вход общей массы 5 воздействует момент нагрузки.
Элементы 5, 18, 19, 26, 27, 29, 30, 32, 34, 35 и внешние контуры регулирования моментов упругости кинематических передач образуют контур регулирования целевой координаты общей массы 5, общий для всех электроприводов.
Электрический двигатель первого электропривода 1 и электрический двигатель второго электропривода 2 могут быть постоянного тока независимого возбуждения, асинхронные, синхронные вентильные с электромагнитной системой возбуждения или с возбуждением от постоянных магнитов. Первый 7 и второй 9 силовые преобразователи выполнены на основе полупроводниковой техники и реализуют управление электрическими двигателями в зависимости от типов последних: двигателями постоянного тока независимого возбуждения по якорной цепи, частотное или векторное управление асинхронными, синхронными вентильными электрическими двигателями с электромагнитной системой возбуждения или с возбуждением от постоянных магнитов.
В качестве первого 6 и второго 8 датчиков тока, первого 10 и второго 11 датчиков скорости, первого 12 и второго 13 датчиков момента упругости кинематической передачи, датчика скорости общей массы 18, датчика положения общей массы 19 могут быть использованы соответствующие измерительные устройства любого типа.
Все регуляторы 14, 15, 20, 21, 22, 23, 32, суммирующие усилители 16, 17, а также первый 26 и второй 29 сумматоры могут быть реализованы на базе аналоговой техники (операционных усилителях) или на базе программно-аппаратных средств цифровой вычислительной техники.
В качестве задатчика момента распора положительного направления 28, задатчика момента распора отрицательного направления 31 и задатчика перемещения 33 могут быть использованы регулируемые источники напряжения или цифровые элементы цифровой вычислительной техники.
Первый 24 и второй 25 вычислители ускорения, а также вычислитель ускорения общей массы 35 могут быть реализованы на базе программно-аппаратных средств цифровой вычислительной техники. Первый 27 и второй 30 диодные элементы могут быть выполнены на полупроводниковых приборах при реализации системы управления на основе аналоговой техники или на базе программно-аппаратных средств при реализации системы управления на основе цифровой вычислительной техники. Первый 27 и второй 30 диодные элементы выполнены с однонаправленными характеристиками «вход - выход».
Реализация указанной системой регулирования предлагаемого способа регулирования координат взаимосвязанных электроприводов осуществляется следующим образом.
Питание электрических двигателей осуществляют управляемые реверсивные первый 7 и второй 9 силовые преобразователи. Первым 6 и вторым 8 датчиками тока измеряют координаты - токи электрических двигателей 1 и 2 первого и второго электроприводов соответственно. По измеренному току электрического двигателя первого электропривода 1 замыкают контур регулирования тока первого электропривода. По измеренному току электрического двигателя второго электропривода 2 замыкают контур регулирования тока второго электропривода. Для коррекции этих контуров при формировании токов используют последовательные пропорционально-интегральные регуляторы (ПИ-регуляторы) тока первого электропривода 14 и тока второго электропривода 15. Параметры регуляторов токов настраивают так, чтобы скомпенсировать электромагнитную инерцию электрических двигателей первого 1 и второго 2 электроприводов. При этом быстродействие контуров регулирования тока ограничено быстродействием первого 7 и второго 9 силовых преобразователей.
Первым датчиком скорости 10 и первым датчиком момента упругости кинематической передачи 12 измеряют координаты электрических двигателей первого 1 и второго 2 электроприводов - скорости их вращения. Первый 24 и второй 25 вычислители ускорения рассчитывают координаты электрических двигателей первого 1 и второго 2 электроприводов - их ускорения. Первый 12 и второй 13 датчики момента упругости кинематической передачи измеряют координаты кинематических передач - моменты упругости первой 3 и второй 4 упругих кинематических передач первого и второго электроприводов. Обратные связи по координатам электрических двигателей и кинематических передач каждого из электроприводов, а именно по моментам упругости кинематических передач, скоростям и ускорениям электрических двигателей, образуют параллельные регуляторы 20 и 22 внутренних контуров регулирования моментов упругости кинематических передач. Эти регуляторы и суммирующие усилители 16 и 17 настраивают в соответствии с процедурой модального синтеза таким образом, чтобы обеспечить заданные динамику и темп регулирования моментов упругости кинематических передач каждого электропривода. При этом быстродействие внутренних контуров регулирования моментов упругости кинематических передач ограничено быстродействием контуров регулирования токов.
Внешние контуры регулирования моментов упругости кинематических передач каждого электропривода корректируют последовательными регуляторами 21 и 23, которые представляют собой пропорционально-интегрально-дифференциальные регуляторы (ПИД-регуляторы). Их настраивают таким образом, чтобы скомпенсировать инерционность внутренних контуров. Интегрирующие составляющие регуляторов 21 и 23 обеспечивают астатическую стабилизацию моментов распора в условиях движения общей массы. Внешние контуры замыкают обратными связями по моментам упругости кинематических передач, измеренными первым 12 и вторым 13 датчиками момента упругости кинематической передачи. При этом быстродействие внешних контуров регулирования моментов упругости кинематических передач ограничено быстродействием внутренних контуров регулирования моментов упругостей кинематических передач.
Задатчик момента распора положительного направления 28 и задатчик момента распора отрицательного направления 31 задают моменты распора противоположных знаков. Задатчиком перемещения 33 задают величину целевой координаты общей массы 5.
Датчик скорости общей массы 18 и датчик положения общей массы 19 измеряют координаты общей массы - скорость движения и ее положение соответственно. Вычислитель ускорения общей массы 35 рассчитывает координату общей массы - ее ускорение. Контур регулирования целевой координаты (положения) общей массы корректируют последовательным регулятором 32, который представляет собой ПИД-регулятор. Его настраивают таким образом, чтобы скомпенсировать инерционности внешних контуров регулирования моментов упругости кинематических передач. Интегрирующая составляющая указанного регулятора обеспечивает астатическую стабилизацию целевой координаты общей массы 5 при наличии момента нагрузки, приложенного к ней. Параллельный модальный регулятор 34 контура регулирования целевой координаты (положения) общей массы 5 образован обратными связями по координатам общей массы 5 - ускорению, скорости и положению. Модальный регулятор целевой координаты 34 настраивают в соответствии с процедурой модального синтеза таким образом, чтобы обеспечить заданные динамику, точность и темп регулирования целевой координаты. При этом быстродействие указанного контура ограничено быстродействием внешних контуров регулирования моментов упругости кинематических передач.
На катоде первого диодного элемента 27 и аноде второго диодного элемента 30 формируются управляющие воздействия для задания движущих моментов соответственно первому и второму электроприводам. При этом первый 27 и второй 30 диодные элементы задают управляющее воздействие только на тот электропривод, который в данный момент должен быть движущим.
Совместное действие регуляторов 14, 20, 21 первого электропривода, регуляторов 15, 22, 23 второго электропривода, регулятора целевой координаты (положения) 32 и модального регулятора целевой координаты (положения) 34 компенсирует инерционности. Это приводит к снижению порядка характеристического полинома замкнутого контура регулирования целевой координаты (положения) общей массы 5. Для получения желаемых динамических свойств этого контура его достаточно замкнуть тремя обратными связями - по целевой координате и двум ее производным (по положению, скорости и ускорению). Следовательно, контур регулирования целевой координаты по сравнению с прототипом имеет большее быстродействие, а именно больший темп нарастания целевой координаты до заданного значения, меньшее транспортное запаздывание и большую точность, которая характеризуется добротностью.
Динамику и точность регулирования координат взаимосвязанных электроприводов иллюстрируют графики изменения координат в различных режимах движения, показанные на фиг. 2 и фиг. 3. Способ реализует заданную динамику регулирования координат и астатическую стабилизацию целевой координаты общей массы при воздействии на нее момента нагрузки Мн0, о чем свидетельствуют графики на фиг. 2, где в статическом режиме действительная координата ϕ0 равна заданной ϕз.
Повышение быстродействия и точности при регулировании координат взаимосвязанных электроприводов иллюстрируют графики изменения координат в различных переходных режимах и режимах установившегося движения, показанные на фиг. 4 и фиг. 5.
Способ реализует астатическую стабилизацию момента распора при движении общей массы с постоянной скоростью, о чем свидетельствуют графики, показанные на фиг. 3, где действительные величины моментов упругости Му1 и Му2 равны заданным величинам ±Мp момента распора, благодаря чему исключается раскрытие зазоров кинематических передач.
График 1 на фиг. 4 показывает изменение во времени скачкообразного задающего воздействия ϕз. График 2 на фиг. 4 показывает изменение положения ϕ0 общей массы при отработке скачкообразного задающего воздействия при предложенном способе регулирования координат взаимосвязанных электроприводов с повышенным быстродействием и точностью. График 3 на фиг. 4 показывает изменение положения ϕ0 общей массы при отработке скачкообразного задающего воздействия при способе регулирования координат взаимосвязанных электроприводов по прототипу. В обоих случаях задан одинаковый темп формирования моментов распора и движущих моментов электроприводов. График 2 по сравнению с графиком 3 имеет меньшее транспортное запаздывание и больший темп нарастания до заданного уровня (график 1), что свидетельствует о повышении быстродействия регулирования координат взаимосвязанных электроприводов. При этом в предлагаемом изобретении для обеспечения заданного темпа регулирования целевой координаты не требуется завышать темп формирования моментов распора и движущих моментов электроприводов более чем в 2-3 раза.
График 1 на фиг. 5 показывает изменение во времени линейно нарастающего задающего воздействия ϕз. График 2 на фиг. 5 показывает изменение положения ϕ0 общей массы при отработке линейно нарастающего задающего воздействия при предложенном способе регулирования координат взаимосвязанных электроприводов с повышенным быстродействием и точностью. График 3 на фиг. 5 показывает изменение положения ϕ0 общей массы при отработке линейно нарастающего задающего воздействия при способе регулирования координат взаимосвязанных электроприводов по прототипу. График 2 по сравнению с графиком 3 имеет меньшее отставание от задающего воздействия (график 1), что свидетельствует о повышении точности регулирования координат взаимосвязанных электроприводов.
Использование изобретения позволяет повысить быстродействие и точность систем регулирования координат взаимосвязанных электроприводов, в том числе опорно-поворотных устройств различного назначения, металлообрабатывающих станков, механизмов металлургического производства и других механизмов, требующих высокого быстродействия и точности регулирования координат.
Способ регулирования координат взаимосвязанных электроприводов с упругими звеньями и зазорами в кинематических передачах по принципу электромеханического распора, включающий формирование токов, моментов распора и движущих моментов электроприводов и регулирование целевой координаты общей массы контуром, общим для всех электроприводов, причем темп регулирования движущих моментов и моментов распора устанавливают единым и выше темпа регулирования целевой координаты, отличающийся тем, что формирование токов каждого электропривода осуществляют контурами регулирования токов, индивидуальными для каждого электропривода, при этом динамику регулирования токов корректируют последовательными регуляторами, затем формирование моментов распора и движущих моментов электроприводов осуществляют внешними и внутренними контурами регулирования моментов упругости кинематических передач, индивидуальными для каждого электропривода, при этом динамику регулирования моментов распора и движущих моментов каждого электропривода корректируют параллельными регуляторами внутренних контуров в зависимости от координат электрических двигателей и кинематических передач, затем динамику формирования моментов распора и движущих моментов каждого электропривода корректируют последовательными регуляторами внешних контуров, далее динамику и точность регулирования целевой координаты корректируют последовательным регулятором и параллельным регулятором контура регулирования целевой координаты в зависимости от координат общей массы.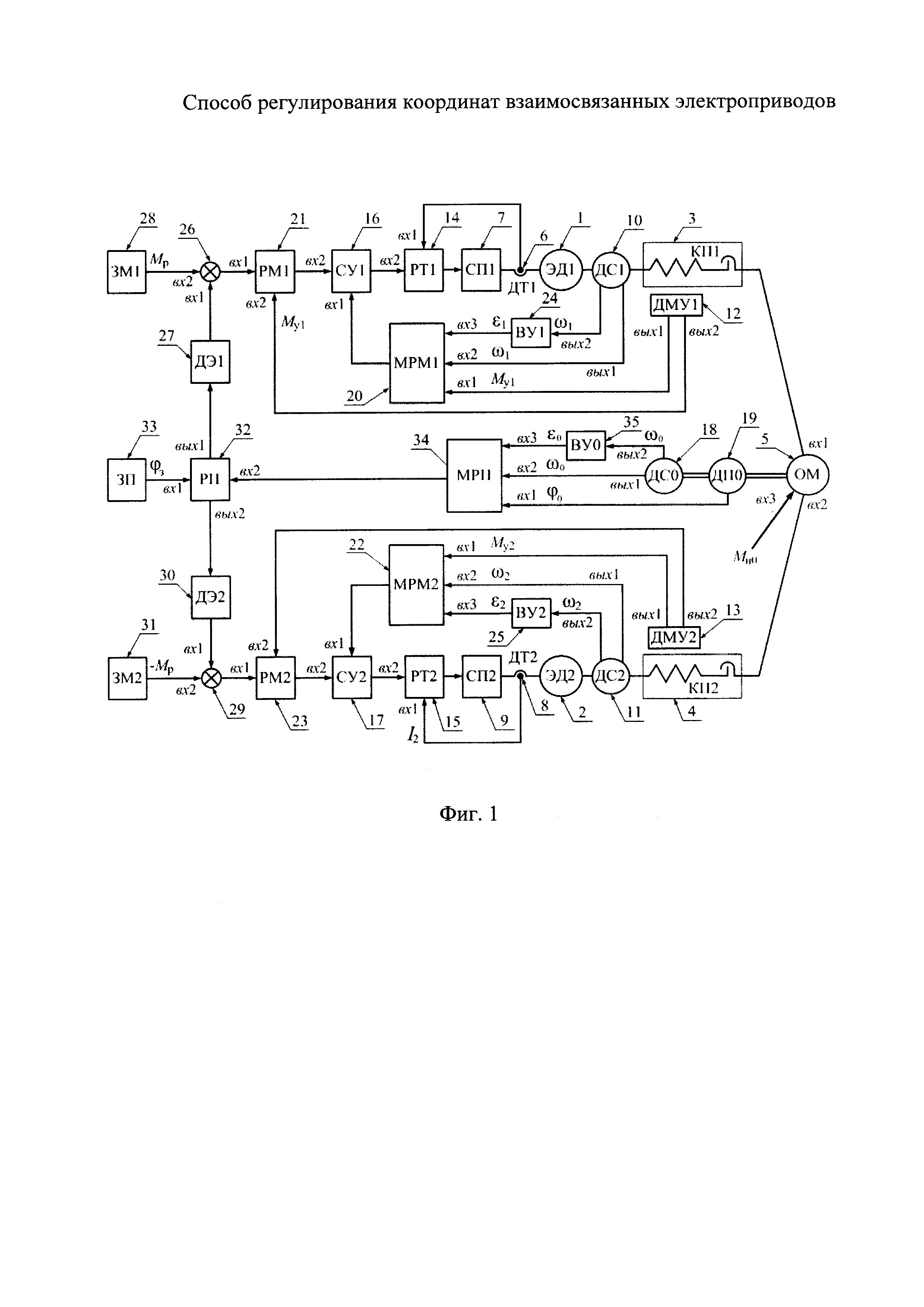
Способ изготовления электродно-диафрагменного блока для щелочного электролизера воды
Способ изготовления диафрагменного материала для электролитического разложения воды
Пылеугольная топка
Устройство для токарной обработки некруглых деталей
Устройство для управления вентильно-индукторным электроприводом
Способ электропитания генератора озона поверхностного разряда
Микроканальный теплообменник
Гель-полимерный электролит для литиевых источников тока
Энергоустановка с электрохимическим генератором на основе водородно-кислородных топливных элементов
Установка для нанесения покрытий на поверхности деталей
Способ автоматического регулирования координат электропривода и устройство для его осуществления
Способ идентификации линейной динамической системы
Способ настройки пропорционально-интегрально-дифференциального регулятора замкнутой динамической системы
Способ управления вентильно-индукторным электрическим двигателем
Способ идентификации линейного динамического объекта

