Результат интеллектуальной деятельности: ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Вид РИД
Изобретение
Область техники
Изобретение относится к области авиационной техники, а именно к учебно-тренировочным устройствам, и предназначено для обучения пилотирования летного состава и авиадиспетчеров-операторов управления воздушным движением.
Известен тренажерный комплекс для обучения авиадиспетчеров диспетчерских пунктов руления, старта и посадки на реальном летном поле (патент на полезную модель №111703, G09B 9/00 2011) - средство обучения, учебно-тренировочное устройство для обучения авиадиспетчеров.
Тренажерный, комплекс включает шлем виртуальной реальности, снабженный двумя микродисплеями и двумя видеокамерами, диспетчер находится в помещении, из которого имеется обзор реальной ВПП, систему позиционирования, содержащее средство определения трех линейных и трех угловых координат положения шлема виртуальной реальности в пространстве. Компьютер, получив данные от системы позиционирования, генерирующий пару стереоизображений для микродисплеев шлема виртуальной реальности, причем измерительный преобразователь системы позиционирования размещен на шлеме виртуальной реальности.
На базе технологии комбинированной реальности с помощью виртуальных воздушных судов (ВС) и иных виртуальных объектов на реальном летном поле моделируют учебные не штатные, в том числе аварийные, ситуации, террористические атаки, при этом виртуальный характер объектов обеспечивает полную безопасность процесса обучения. Моделируется ситуация опасного сближения самолетов. Авиадиспетчер участвует в процессе посадки серий виртуальных самолетов, управляемых летчиками-операторами (инструкторами). При посадке одного из виртуальных самолетов неожиданно на ВПП возникает виртуальный объект-препятствие - другое ВС.
Однако данный тренажер ограничен областью пространства ВПП и не позволяет проводить тренировку, обучение летчиков ВС и авиадиспетчеров на отдаленных пространствах от ВПП. Известный тренажер не обеспечивает обучение летчиков и диспетчеров в режимах предотвращения столкновения ВС на больших расстояниях до пункта УВД.
Известен способ и система уклонения от столкновений (СУС) для летательного аппарата (см. патент РФ №2343528 G05D 1/06, 2006), где техническим результатом является расширение функциональных возможностей. СУС содержит систему предупреждения столкновений (СПС). СПС способна обнаружить риск столкновения с одним летательным аппаратом (ЛА), выдает сигнал тревоги и определяет информацию уклонения, в котором при выдаче сигнала тревоги определяются предварительные установки уклонения, выраженные в показателях вертикальной скорости, высоты, и которые передаются в систему автоматического управления (САУ), а также автомат тяги (AT). На следующем этапе уклонения преобразуются в предварительные установки, выраженные в показателях нагрузки летчиков и пассажиров. Предварительные установки определяются таким образом, чтобы минимизировать расхождение между траекторией уклонения ЛА и исходной. Предварительные установки передаются на командно-пилотажный прибор (ПКП), установленный перед летчиком.
Однако эта система СПС основана на обмене информацией с помощью ответчиков на ВС. СПС оценивает потенциальную опасность и вычисляет соответствующий маневр для ее предупреждения, исключительно в вертикальной плоскости.
Известна система предупреждения столкновения ЛА при летных испытаниях, патент РФ на изобретение №2134911 G08G 7/02 1999 г., взятая за прототип, технический результат которой направлен на повышение точности и безопасности при летных испытаниях за счет представления параметров взаимного пространственного положения и движения двух летательных аппаратов ЛА. Система предупреждения столкновения (СПС) ЛА при летных испытаниях содержит систему измерения навигационных и высотно-скоростных сигналов (СВС), адаптер ввода, адаптер вывода, центральный вычислитель, включающий блок ввода констант, вычислитель параметров взаимного положения ЛА, вычислитель действительных координат, вычислитель расстояния между ЛА, вычислитель предварительной обработки данных, вычислитель относительной скорости, вычислитель зоны опасного сближения, вычислитель единого временного фронта, а также системы отображения информации и сигнализации, систему автоматического управления (САУ) и автомат тяги (AT), спутниковую навигационную систему (СНС), инерциальную навигационную систему (ИНС), аппаратуру межсамолетного обмена, связной контроллер. Кроме того, в состав системы входят наземная контрольно-корректирующая станция (ККС) и пункт управления летным экспериментом, при этом связной контроллер ЛА радиотехнически связан с ККС, пункт управления летным экспериментом радиотехнически связан с аппаратурой межсамолетного обмена.
Однако данная система не позволяет производить в наземных условиях совместную тренировку обучения летчиков двух ЛА и авиадиспетчера УВД. Указанная система не обеспечивает безопасности и выработки технических совместных навыков у летчиков ЛА и авиадиспетчеров, что требуется для отработки систем предупреждения столкновения ЛА в воздушном пространстве.
Анализ технических и тактических характеристик СПС показывает их недостатки обеспечения безопасности проведения полета ЛА при сближении ЛА до десятков метров, что определяет невысокий уровень безопасности от выполнения полетов. Режим полета предотвращения и уклонения встречи с ЛА является наиболее опасным. Дополнительные усложнения имеют место по мере повышения интенсивности возмущающих воздействий на ЛА.
Поэтому безопасность обеспечивается путем проведения специальной тренировкой экипажа. Изобретение направлено на повышение уровня безопасности тренировки за счет представления параметров относительного взаимного пространственного положения и движения двух ЛА и оператора УВД.
Технический результат, на достижение которого направлено предлагаемое изобретение, заключается в создании тренажерного комплекса обучения летчиков и авиадиспетчеров для обучения предотвращения столкновения ВС на всех расстояниях до пункта УВД.
Существенные признаки
Для достижения этого технического результата в полиэргатический тренажерный комплекс(ПТК) обучения предупреждения столкновений летательных аппаратов (ЛА), включающий рабочие места (РМ) пилотов в кабинах двух ЛА, содержащих систему органов управления (СОУ) самолетом и автоматом тяги (AT) двигателей, самолетный бортовой вычислитель (БВ), связанный с центральным вычислителем (ЦВ) через адаптеры ввода с пилотажно-навигационным оборудованием (ПНО), систему отображения информации (СОИ), аппаратуру межсамолетного обмена, а на земле - РМ инженера-экспериментатора, включающее СОИ, навигационное оборудование, аппаратуру связи и наблюдения, контрольно-корректирующую станцию (ККС), связанные с ЦВ, в него введены в наземные РМ пилотов каждого ЛА, имитаторы полета ЛА с имитаторами СОУ и AT, имитаторы ПНО, содержащие спутниковую навигационную систему (СНС), инерциально-навигационную систему (ИНС), систему воздушных сигналов (СВС), радионавигационную систему ближней навигации (РСБН), бортовую радиолокационную станцию (РЛС), имитаторы бортового вычислителя ЛА, связанные с СОУ и СОИ, соединенные с адаптером связи с ЦВ. В РМ авиадиспетчера введены имитаторы - модели радиолокационной станции (РЛС), контрольно-корректирующая станция (ККС), аппаратура-адаптер блока связи, которые соединены с ЦВ.
Кроме того, структура ЦВ содержит блок ввода констант, связанный с входами-выходами вычислителя предварительной обработки данных (ВПОД), с входом вычислителя зоны опасного сближения (ВЗОС) и с вход-выходом вычислителя параметров пространственного взаимного положения (ВППВП). Выход вычислителя действительных координат(ВДК) соединен с входами вычислителя относительной скорости (ВОС), вычислителя ВЗОС, вычислителя преобразования координат (ВПК). Вычислитель параметров пространственного взаимного положения (ВППВП), первый и второй выход которого связаны с вычислителем расстояния между летательными аппаратами (ВРМЛА) и с адаптером вывода данных, а вход-выход - с вычислителем преобразования координат (ВПК). Выходы вычислителя единого временного фронта (ВЕВФ) подключены к адаптеру ввода данных, ВПК и вычислителю действительных координат (ВДК), а его вход связан с выходом вычислителя предварительной обработки данных (ВПОД), связанного с адаптером ввода данных. Вход блока формирования изображений (БФИ) связан с выходом адаптера вывода данных, а выход связан с входом системы отображения информации (СОИ). Выход диспетчера связан с входом вычислителя расстояния между ЛА (ВРМЛА), БФИ, ВОС адаптера вывода. Выходы ВЗОС соединен с входами адаптера вывода, а третий вход ВЗОС соединен с выходом ВОС, четвертый вход соединен с выходом ВРМЛС, выход ВОС соединен с входом адаптера вывода, выход ВРМЛА соединен с входом адаптера вывода, выходы блоков связи первого и второго РМ ЛА и пункта диспетчера УВД соединены с входами аппаратуры обмена, выход которого соединен с адаптером ввода информации в ЦВ.
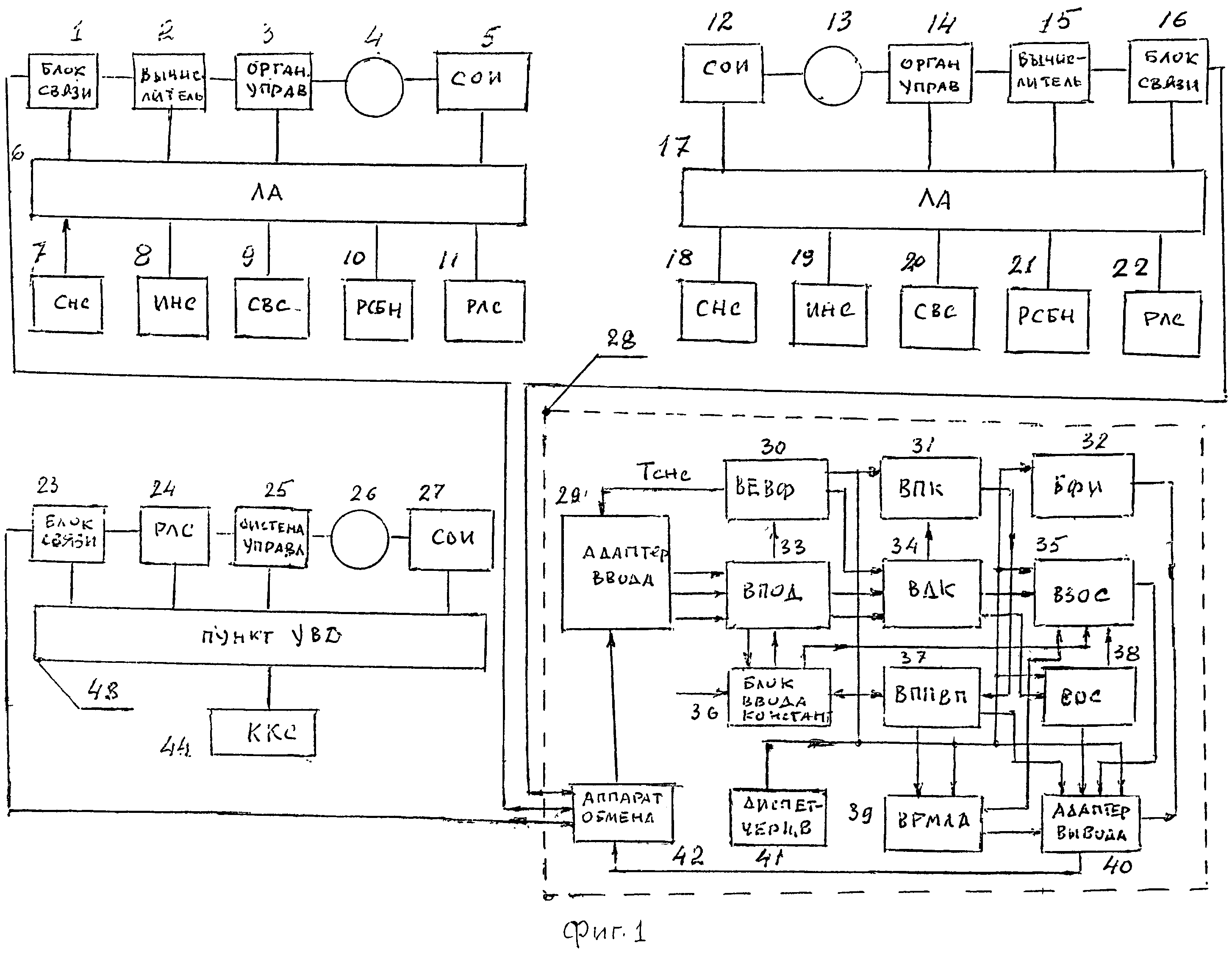
На фиг.1 представлена блок-схема ПТК предупреждения столкновения ЛА.
1, 16 - блоки связи (обмена) аппаратура межсамолетного обмена;
23 - блок связи (обмена).аппаратура связи и наблюдения;
2, 15 - бортовые вычислители с адаптерами связи;
3, 14 - имитаторы систем органов управления (СОУ) и автомата тяги (АТ)двигателей;
4, 13 - пилоты;
5, 12, 27 - система отображения информации (СОИ);
6, 17 - модели летательных аппаратов (ЛА), имитаторы полета ЛА;
7, 18 - имитаторы спутниковой навигационной системы (СНС);
8, 19 - имитаторы инерциальной навигационной системы (ИНС);
9, 20 - имитаторы систем воздушных сигналов (СВС);
10, 21 - имитаторы радиотехнической системы ближней навигации (РСБН);
11, 22, 24 - имитаторы радиолокационной станции (РЛС);
25 - система управления УВД;
26 - авиадиспетчер;
28 - центральный вычислитель (ЦВ);
29 - адаптер ввода информации;
30 - вычислитель единого временного фронта (ВЕВФ);
31 - вычислитель преобразования координат (ВПК);
32 - блок формирования изображений индикации (БФИ);
33 - вычислитель предварительной обработки данных (ВПОД);
34 - вычислитель действительных координат (ВДК) комплексной обработки информации (КОИ);
35 - вычислитель зоны опасного сближения (ВЗОС);
36 - блок ввода констант (БВК);
37 - вычислитель параметров пространственного взаимного положения (ВППВП);
38 - вычислитель относительной скорости (ВОС);
39 - вычислитель расстояния между ЛА (ВРМЛА);
40 - адаптер вывода;
41 - диспетчер ЦВ;
42 - аппаратура обмена (вычислитель);
43 - пункт УВД;
44 - контрольно-корректирующая станция (ККС);
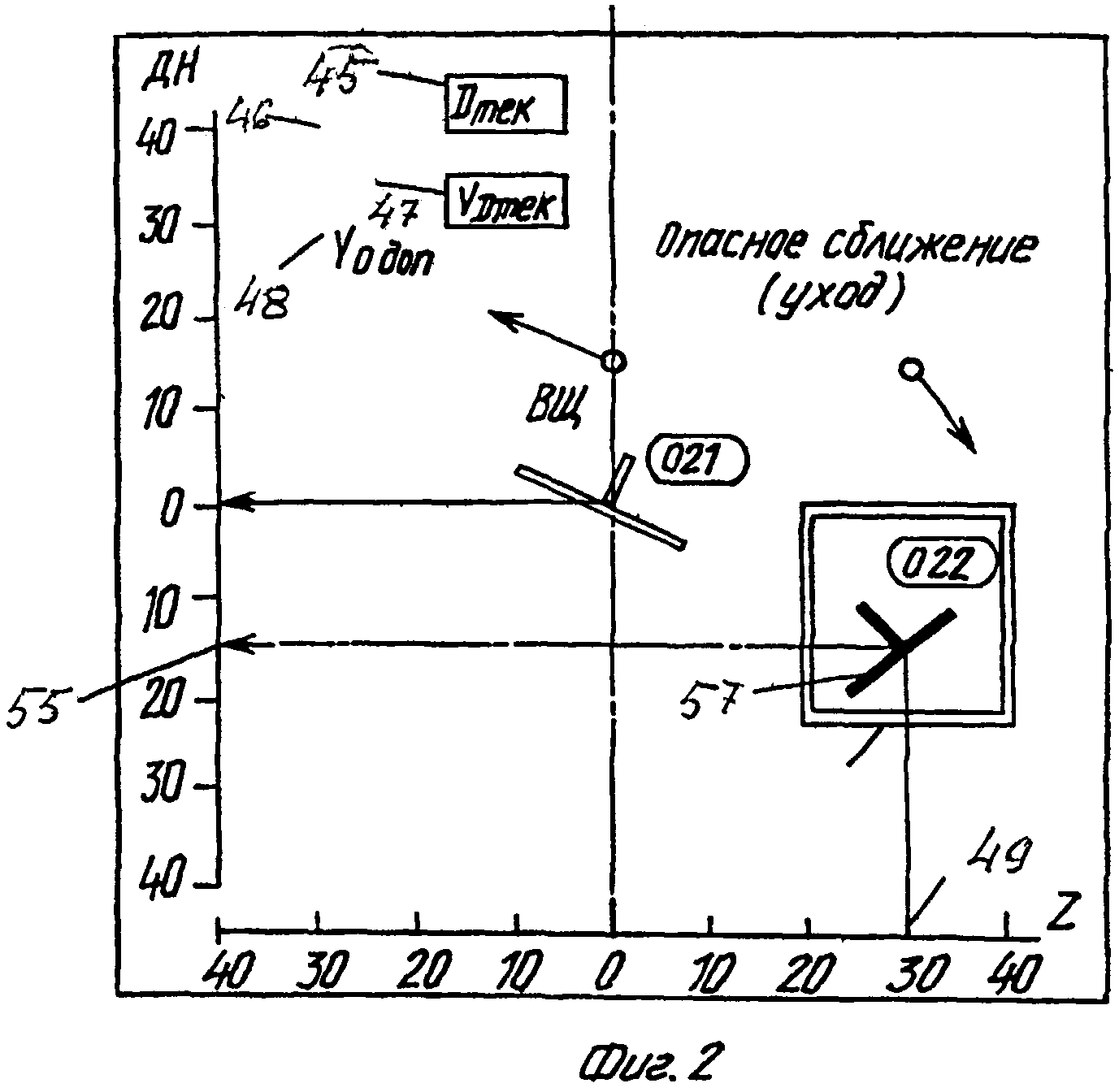
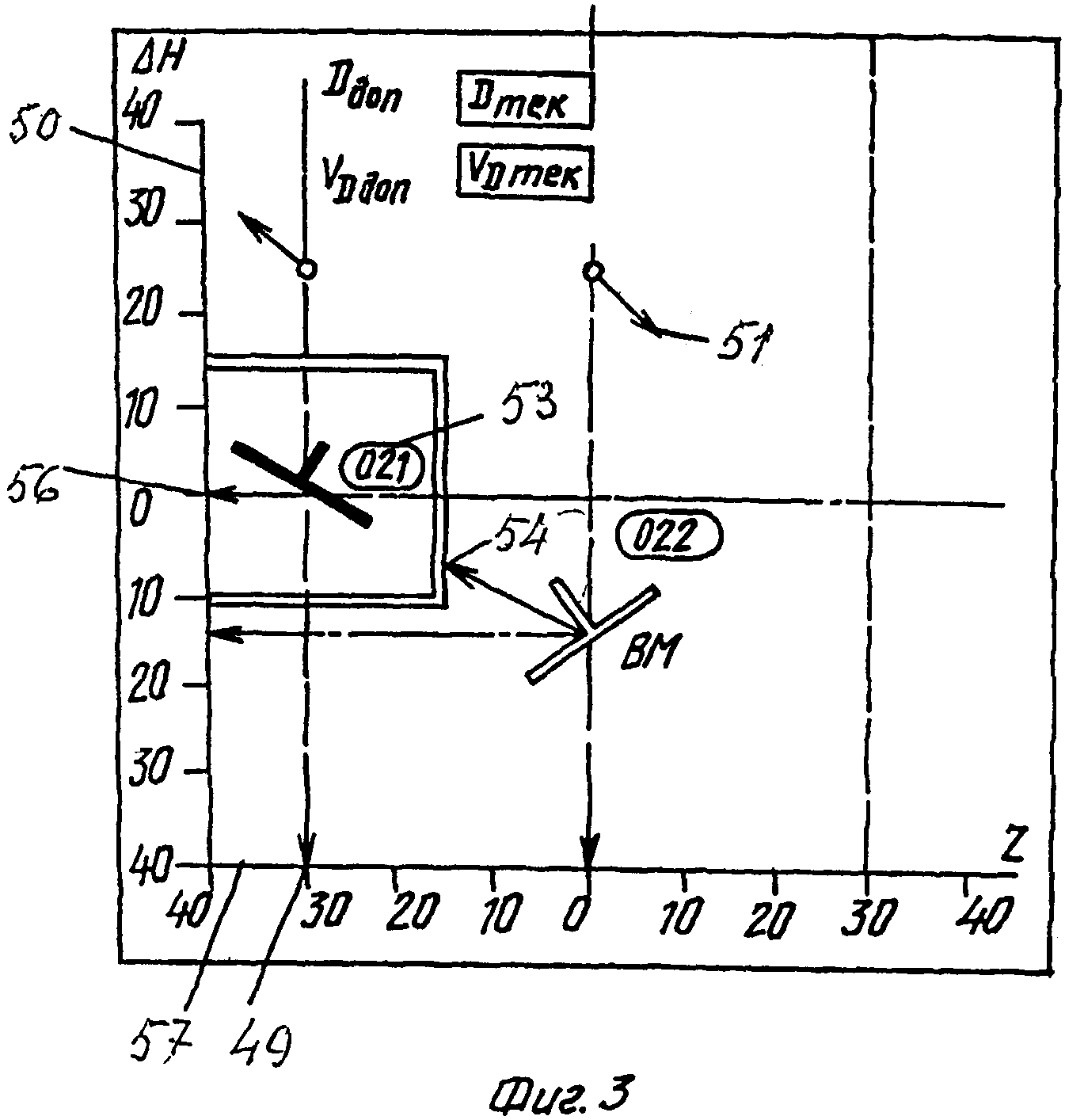
На фиг.2.3 изображены лицевые части информационного поля индикаторов СОИ (индексы и метки), где:
45 - счетчик допустимой дистанции сближения;
46 - счетчик дистанции сближения;
47 - счетчик допустимой скорости сближения;
48 - счетчик скорости сближения;
49 - индекс бокового смещения;
50 - шкала превышения;
51 - команды на «уход» при опасном сближении;
52 - зона опасного сближения (ЗОС);
53 - идентификаторы ЛА (номера позывных);
54 - вектор изменения скорости сближения;
55 - индекс превышения;
56 - силуэт ЛА;
57 - шкала бокового смещения.
Система уклонения от столкновений и предупреждения столкновений способна обнаружить риск столкновения с другим ЛА-нарушителем, который вторгается в пространство, находящееся близко к текущему положению рассматриваемого ЛА, и при таком обнаружении выдать сигнал тревоги и определить информацию уклонения.
Маневр уклонения ЛА-нарушителя представляет собой сложный маневр, при котором экипаж должен уклониться от траектории ЛА-нарушителя, сохраняя при этом управление собственным ЛА и траекторию его полета.
При выполнении такого маневра возникают, в частности, две проблемы:
- пилот посылает ЛА до предела или за его пределы диапазонов своего полетного режима;
- пилот выходит из своего плана полета для выполнения этого уклонения.
При этом он рискует пересечь траекторию третьего ЛА. В результате часто нарушается воздушное движение, в частности в зонах подхода к большим аэропортам.
Полиэргатический тренажерный комплекс (ПТК) обучения предупреждения столкновений ЛА содержит рабочие места (РМ) пилотов в кабинах двух ЛА, имитаторы систем органов управления (СОУ) самолетом и автомат тяги (AT) двигателей 3, 14, самолетные бортовые вычислители (БВ) 2, 15 с адаптерами связи, связанные с центральным вычислителем (ЦВ) 28 и через адаптеры с пилотажным навигационным оборудованием (ПНО), систему отображения информации (СОИ) 5, 12, аппаратуру межсамолетного обмена 1, 16, а на земле - РМ инженера-экспериментатора 43, включающей СОИ, ПНО, аппаратуру связи и наблюдения 23, контрольно-корректирующую станцию (ККС) 44, связанную с ЦБ - 28. В наземные РМ пилотов каждого ЛА введены имитаторы полета ЛА - 6, 17 с имитаторами СОУ и AT - 3, 14, имитаторы ПНО, содержащие спутниковую навигационную систему (СНС) 7, 18, инерциально-навигационную систему (ИНС) - 8, 19, систему воздушных сигналов (СВС) 9, 20, радионавигационную систему ближней навигации (РСБН) - 10, 21, систему бортовой радиолокационной станции (РЛС) - 11, 21, имитаторы бортового вычислителя ЛА 2,15, связанные с СОУ и СОИ - 3, 14, соединенные с адаптером связи с ЦВ - 28, а в РМ авиадиспетчера 43 введены СОИ - 27, имитаторы - модели радиолокационной станции (РЛС) - 24, ККС - 44, аппаратура - адаптеры связи - 23, которые соединены с ЦВ - 28. Структура ЦВ - 28 содержит блок ввода констант (БВК) 36, связанный с входами вычислителя предварительной обработки данных (ВПОД) 33, подключенного выходами к вычислителю действительных координат (ВДК) - 34 и к блоку ввода констант (БВК) - 36 и вычислителя зоны опасного сближения (ВЗОС) - 35, выход вычислителя действительных координат ВДК - 34 соединен с вычислителем относительной скорости ВОС - 38, вычислителем преобразования координат ВПК - 31 и вычислителем зоны опасного сближения ВЗОС - 35, вычислитель параметров взаимного положения ВППВП - 37, первый и второй выход которого связан с вычислителем расстояния между ЛА ВРМЛА - 39 и с адаптером вывода данных 40, а вход - с вычислителем преобразования координат ВПК - 31, выходы вычислителя единого временного фронта ВЕВФ - 30 подключены к адаптеру 29 ввода данных и вычислителю действительных координат ВДК - 34, а его вход связан с выходом вычислителя предварительной обработки данных ВПОД - 33, связанного с адаптером ввода данных 29, вход блока формирования изображений БФИ-32 связан с выходом адаптера вывода данных - 40, выход адаптера вывода данных - 40 связан через аппарат обмена - 42 с блоками связи - 1, 16, 23 РМ первого и второго ЛА и РМ диспетчера УВД. Выход диспетчера ЦВ связан с входами ВРЛМА - 39, БФИ - 32, ВЗОС - 35, ВОС - 38, адаптера вывода - 40, вход ВЗОС - 35 соединен с выходом ВОС - 38, а второй вход ВЗОС - 35 - с выходом ВДК - 34, третий вход соединен с выходом ВРМЛА - 39, а выходы ВЗОС-35 подключены к входам адаптера вывода - 40, выход ВОС - 38 соединен с входом адаптера вывода - 40, выход ВРМЛА-39 соединен с входом адаптера вывода - 40, выходы блоков связи - 1, 16, 23 первого, второго РМ ЛА и пункта диспетчера УВД соединены с входами аппаратуры обмена - 42, выход которого соединен с адаптером ввода информации - 29 в ЦВ. Для решения этой задачи в структуре построения ПТК предусматриваются установить на моделях ЛА (6, 17):
- центральный вычислитель (28)
- имитаторы спутниковых навигационных систем СНС - 7, 18
- имитаторы инерциальных навигационных систем ИНС - 8,19
- имитаторы систем воздушных сигналов СВС - 9, 20
- имитаторы радиотехнических систем ближней навигации РСБН - 10, 21
- имитаторы радиолокационных станций РЛС - 11, 22, 24.
При этом в центральный вычислитель 28 через адаптер (29) поступает следующая информация:
от имитаторов СНС 7, 18
- географические координаты φ,λ
- составляющие скоростей VN, VE, VY
- геометрическая высота HГ
- текущее время Tтек.
от имитаторов ИНС 8, 19
- географические координаты φ,λ
- истинный курс (ИК)
- составляющие скоростей V1, V2
- текущее время Tтек.
от имитаторов СВС 9, 20
- истинная скорость Vист.
от имитаторов РСБН 10, 21, РЛС 11, 22, 24
- азимут A
- дистанция ДН.
Кроме определения текущего местоположения ЛА в вычислителях 2, 15 с использованием данной информации вычисляются текущие значения следующих параметров:
- дистанция сближения в горизонтальной плоскости Дтек.
- скорость сближения двух ЛА - Vсб. тек.
- превышение одного ЛА над другим - Hтек.
- боковое уклонение одного ЛА по отношению к другому - Zтек.
Для формирования ограничений по этим параметрам с пульта вычислителя предусмотрен ввод в вычислитель допустимых значений этих параметров (Ддоп., Vдоп., Ндоп., Zдоп.), которые могут меняться в зависимости от целей выполняемого полета. Кроме того, с пульта предусмотрен ввод номера ЛА или его N-позывной.
Обмен информацией между двумя ЛА осуществляется по следующим параметрам:
- географическим координатам φ1, λ1, φ2, λ2
- составляющим скоростей VN, VE, VY от СНС 7, 18
- высоте
- относительной скорости сближения
- времени T
Все эти параметры из центрального вычислителя - 28 передаются с одного борта на другой. Для этого в структурной схеме ПТК имеется аппаратура передачи информации по каналу радиосвязи - 1, 16. Выдача информации о взаимном положении ЛА на пункте УВД-43 осуществляется передачей по каналу радиосвязи - 1, 16 из вычислителей - 2, 15 ЛА - 6, 17 следующей информации:
- координат (в прямоугольной и полярной системах координат)
- высоты
- курса
На пункте УВД аналогично СОИ-27 формируется зона опасного сближения двух ЛА - 6, 17. При опасном сближении ЛА из центрального вычислителя - 28 в систему звуковой сигнализации выдаются:
- «опасное сближение» (речевое сообщение) как предупреждающий сигнал
- «уход» (звуковое и речевое сообщение)
Связь центрального вычислителя - 28 с системой звуковой (речевой) сигнализации - осуществляется через адаптеры - 29 и 42.
Для отображения текущего местоположения ЛА на СОИ - 5, 12 из ЦВ - 28 выдаются текущие и допустимые значения:
- дистанции сближения двух ЛА - Дтек., Ддоп.,
- скорости сближения двух ЛА - Vсбл.тек., Vсбл.доп.
- превышение одного ЛА над другим - Hтек., Hдоп.
- боковое смещение ЛА относительно другого в текущий момент времени - Zтек., Zдоп.
На СОИ - 5, 12 по информации, полученной от ЦВ - 28 создается зона опасного сближения, которая меняет окраску в зависимости от сигнализации «опасное сближение» или «уход».
ЦВ - 28 предназначен для обработки информации с целью получения заданных точностных характеристик по определению взаимного положения двух ЛА - 6, 17. Наличие ЦВ - 28 позволяет организовать комплексную обработку информации (КОИ), поступающей в него от имитаторов СНС, ИНС, СВС, РСБН - 7, 18, 8, 19, 9, 20, 10, 21, при которой возможно получить точностные характеристики более высокие, чем каждого средства определения параметров в отдельности.
В ЦВ - 28 информация через последовательный порт в символьном виде (φ, VN, VE, VY, HГ, T. информация ИНС - 8,19 принимается с помощью адаптера ввода информации (φ, λ, V1, V2 истинного курса (ИК), СВС - 9, 20 - с помощью адаптера ввода информации - 29.
В системе ПТК между ЦВ - 28 ЛА - 6, 17 через аппаратуру межсамолетного обмена - 1, 16 предусмотрен обмен информацией по координатам φ, λ, составляющих скоростей VN, VE, VY, высоте H и текущему времени T. По этой информации в вычислителях - 2, 15 обоих ЛА вычисляются:
дистанция сближения в горизонтальной плоскости Дтек.
скорость сближения двух ЛА - Vд.тек.
превышение одного ЛА над другим ΔHтек.
боковое уклонение одного ЛА по отношению к другому Zтек.
В ЦВ - 28 предусмотрен ввод с пульта вычислителя допустимых значений параметров Ддоп., Zдоп., Hдоп., Vдоп., которые в зависимости от целей выполняемого полета могут носить переменные значения, и пороги срабатывания этих параметров, которые также являются переменными величинами и могут быть функцией от скорости сближения. ЦВ - 28 дает информацию в систему звуковой сигнализации на срабатывание сигнализации «опасное сближение» и «уход», а также в систему регистрации параметров.
Порты ввода-вывода - модули в вычислителях - 2, 15, задачей которых является осуществление взаимодействия между Ц.В. - 28 и внешними коммуникациями вычислителей - 2, 15.
Порт ввода - 29 - источник данных, адресуемый регистр, подключенный к шинам ЦВ - 28. Он выдает слово в процессор, когда к нему осуществляется обращение. Порт вывода - 42 - приемник данных адресуемый регистр, подключенный к шинам ЦВ - 28. Он получает слово от процессора, когда последний обращается к нему. Это обращение одно или двухнаправленные буферные регистры, предназначенные для построения программного интерфейса. Каждый порт является составной частью интерфейса между ЦВ - 28 и датчиками, контролерами. Адаптер - 29 ввода данных обеспечивает одновременный прием на ЦВ-28 разнородной асинхронной информации в полном объеме (от каждого источника) с точностью временной привязки принимаемых параметров не хуже 0,001 с. Временная привязка, наряду с априорными данными (например, преобразование, транспортное запаздывание), необходима для дальнейшей синхронизации и приведение ее к шкале единого времени.
Диспетчер - 41 ЦВ - 28 распределяет процессорное время ЦВ между вычислителями и производит обмен данными между вычислителями и блоками. При распределении процессорного времени модулям присваиваются приоритеты, при передаче управления используется аппарат системных прерываний. Вся последовательность вычислений включает в себя:
- получение физических значений параметров
- отбраковку информации
- приведение данных к единому временному фронту
- комплексную обработку информации
- преобразование координат в земную систему
- определение расстояния между ЛА - 6, 17, составляющих вектора относительной скорости
- пересчет координат соседнего ЛА и его вектора скорости в систему координат, связанную с самолетом
- выдачу информации на дисплей и регистрацию.
Взаимодействие ЦВ - 28 с датчиками и потребителями обеспечивается по каналам последовательного кода и каналам межмашинного обмена. ЦВ - 28 решает задачи приема информации от датчиков обработки и анализа информации, формирование выходных данных, в нем реализованы также сервисные программы обеспечения режимов работы. На обработку ЦВ - 28 поступает информация от СНС - 7, 18, ИНС - 8, 19, СВС - 9, 20, РСБН - 10, 21 двух ЛА - 6, 17 с помощью адаптера ввода данных - 29.
В вычислителе ВПОД - 33 осуществляется контроль измерений для защиты фильтра Калмана от сбоев информации. Контроль состоит в том, что на фильтр Калмана проходят лишь те измерения, которые удовлетворяют условию
/Z1-Zi/<Di (1), где Z1 - компоненты вектора измерения, Zi - априорные оценки соответствующих величин, получаемых с помощью алгоритмов калмановской фильтрации. Контроль стойкости осуществляется путем сопоставления значений сигналов ИНС - 8, 19 с предельными величинами и приращений значений сигналов с допустимыми величинами, определяемыми динамическими характеристиками объектов.
Восстановление стойкой информации осуществляется путем аппроксимации бессбойных значений соответствующих параметров полиномамии первой степени.
Контроль стойкости информации СНС - 7, 18 осуществляется путем сопоставления значения сигналов СНС с предельными величинами, определяемыми динамическими характеристиками объекта. В результате вырабатывается признаки достоверности информации СНС - 7, 18 по координатам и скоростям. В ВЕВФ - 30 при вводе информации в ИНС - 8, 09 фиксируются показания системного таймера. В пакете информации от СНС - 7, 18 содержится информация о Гринвическом времени момента начала передачи пакета, что позволяет преобразовать показания системного таймера ИНС в Гринвическое время, к которому относятся координаты и скорости.
Приведение значений каждого параметра к текущему моменту времени Tтек. производится с помощью линейной интерполяции с использованием двух последних значений данного параметра и соответствующих им моментов времени. Если в информации содержатся координаты и скорости изменения координат, относящиеся к единому моменту времени T, то значения координат проводятся к моменту времени Tтек. по формуле
Xтек.X1+Xi(Tтек.-T1), где
X1 - значение координат в момент времени, Xi - значение скорости изменения координат X в момент времени T1, Xтек. - вычисляемое значение координат на момент времени Tтек. Полученные значения параметров подаются на вход вычислителя комплексной обработки информации. В вычислителе ВДК - 34 решаются задачи анализа точностных характеристик ИНС - 8, 19 и формирование эталонных значений координат, составляющих скорости, истинного курса (ИК) ЛА. Для этого используется комплексная обработка информации (КОИ) в вычислителе ВДК - 34, результатом которого являются действительные значения параметров ЛА, используемые для вычисления погрешностей систем. Если Х - значение одного из параметров оцениваемой характеристики ЛА, а Xдейств. - действительное полученное значение соответствующего параметра, то погрешность данной системы или характеристики ЛА определяется по формуле
ΔX=X-Xдейств. или Xдейств.=X-ΔX
Алгоритм калмановской фильтрации обеспечивает наилучшие линейные оценки состояния системы X в момент времени tк, когда Xк определяется из уравнения состояния.
Анализ характеристик ИНС - 8, 19 производится с помощью алгоритма оптимальной обработки информации Калмана, позволяющего разделить суммарные ошибки на составляющие и оценить инструментальные погрешности ИНС. С помощью фильтра Калмана осуществляется оценивание параметров погрешности ИНС в определении координат, составляющих скорости, курса, погрешности построения вертикали, постоянные составляющих гироскопов ИНС, дрейфы, зависящие от ускорений, масштабные коэффициенты погрешностей параметров ИНС.
Формирование эталонных пилотажно-навигационных параметров (координат, скорости, курса) осуществляется путем исключения из значений существующих параметров, определяемых ИНС, оценок ее погрешностей, полученных в результате КОИ.
Вычислитель ВДК - 34 определяет действительные значения траекторных параметров по информации СНС - 7, 18 и ИНС - 8, 19. Значения широты φд, долготы λд и высоты Hд определяются с помощью следующих соотношений:
φд=φснс+VN(t-tснс)/rN
λд=λснс+VE(t-tснс)/rE·cosφснс
Hд=hснс+VH(t-tснс)
где φснс, λснс, hснс - координаты ЛА, выдаваемые СНС - 7, 18 в момент времени, rN, rE - радиусы кривизны земного эллипсоида, t - текущее время.
Значения остальных выходных параметров полагаются равными соответствующим значениям параметров, получаемых от СНС - 7, 18.
На вход вычислителя ВРМЛА - 39 поступает информация о декартовых координатах каждого ЛА в системе координат, связанной с земным эллипсоидом. Вычисление векторов относительного расположения ЛА происходит по формулам:
Dx=X2-X1
Dy=Y2-Y1
D=Z2-Z1,
где X, Y, Z, X2, Y2, Z2 - декартовые координаты первого и второго ЛА. Расстояние между ЛА вычисляется по формуле
На вход вычислителя ВОС-38 поступает информация о проекциях вектора скорости каждого ЛА в системе координат, связанной с земным эллипсоидом. Вычисление векторов относительной скорости происходит по формулам:
Vx=V2x-V1x,
Vy=V1y-V1y
Vz=V2z-V1z
где V1x, V1y, V1z, V2x, V2y, V2z - проекции вектора скоростей первого и соседнего ЛА.
Величина вектора относительной скорости Vr равна
Далее в вычислителе ВПК-31 происходит пересчет прямоугольных координат вектора относительного расположения и вектора относительной скорости соседнего самолета в прямоугольную систему координат с центром в точке нахождения антенны СНС и осями, направленными вдоль строительных осей ЛА.
Вычислитель ВПК-31 преобразования референцных координат в геоцентрические и наоборот реализует следующие алгоритмы.
Если координаты центра референц эллипсоида в геоцентрической системе координат Хо, Yo, Zo, r - радиус-вектор точки N и R - радиус-вектор той же точки в системе координат X, Y, Z, то преобразование определяется векторным соотношением:
r=Δro+(1+m)υEΩR
где m - масштабная поправка геоцентрических систем координат относительно референционной системы, Е - матрица направляющих косинусов, w, ε, υ - углы Эйлера или углы поворота вокруг осей X, Y, Z.
В матричном виде это преобразование выражается:
Обратное соотношение в векторной форме, характеризующее переход системы Хо, Yo, Zo к системе Xо, Yo, Zo, имеет вид:
R=(1+m)-1(ϑEΩ)r-1-Δro
В вычислителе ВЗОС - 35 в парном полете ЛА 6,17 должна обеспечиваться безопасность полета. Пространство вокруг каждого ЛА условно разбивается на зоны - зоны допустимого (Dдоп.) диапазона изменения относительного положения самолетов и зона критического (Dкрит.) сближения:
Dкрит.=Dдоп.+KDт.
Зона критического сближения - минимальные расстояния, на которые сближаются самолеты и при которых можно избежать столкновения ЛА путем выполнения маневров уклонения от столкновения.
Для обеспечения безопасности полета необходимо, чтобы соседний ЛА не вторгался в объект безопасности, т.е. Dx.(t)<Dкрит.; Dy.(t)<Dкрит.; Dz.(t)<Dкрит.,
где Dx.(t), Dy.(t), Dz.(t) - относительные значения взаимных координат ЛА, при котором еще можно предотвратить столкновение путем выполнения маневров обоих ЛА. В общем виде оптимальное значение Dоп. представляет собой функцию многих переменных
Dоп.=∫(Dx,Dy,Dz,V.ηотр.,Yотр.,φруд.,φт.щ.)
где ηотр., γотр. - ограничение сигналов управления избыточной вертикальной перегрузки и крена ЛА. Зависимость Dоп. вычисляется в ЦВ - 28 при вышеописанном условии, формируется команда на выполнение маневра уклонения от столкновения, облет в вертикальной и горизонтальной плоскостях или совокупность этих команд и торможение. Выходом ЦВ - 28 является разрешающая (положительная) команда «безопасно», при которой осуществляется режим стабилизации координат или предупреждающая (отрицательная) команда «опасно», при которой осуществляется сигнализация экипажу об опасном сближении, параметрах движения.
Для повышения точностных характеристик параметров СНС используется дифференциальный метод определения координат местоположения (МП), заключающийся в выявлении и учете в виде поправок сильнокорректированных составляющих погрешностей навигационных параметров с помощью наземных контрольно-корректирующих станций (ККС) 44.
На ККС - 44 с помощью аппаратуры потребителя определяются координаты и сравниваются с данными геодезической привязки. Затем производится расчет соответствующих поправок, которые передаются по каналу радиосвязи потребителям СНС заданного района, что позволяет им, вводя поправки, повысить точность навигационных определений. В дифференциальном режиме работы для повышения точности определения координат принимаются дополнительные меры. На земле в зоне проведения измерений, в точке с известными координатами, устанавливается KKС - 44, которая вырабатывает поправки к измеренным по спутниковым псевдодальностям и передает эти поправки на борт ЛА.
Бортовые приемники СНС - 7,18 вычисляют свое положение с учетом принятых дифференциальных поправок, что позволяет повысить точность определения координат до уровня погрешностей 3-5 м до 2=0,5-1 м.
К перечисленным выше функциям приемника в стандартном режиме при переходе в дифференциальный режим добавляются задачи приема и учета корректирующей информации, вырабатываемой ККС - 44 и вычисление параметров по корректированным радионавигационным измерениям. Контроллер - 44 обеспечивает прием кодовой информации, ее декодирование и представление в формате, пригодном для ввода в приемник.
Связные блоки - 1, 16 через контроллеры согласованы с аналогичной схемой ККС - 44 и обеспечивают синхронизированную работу ПТК.
БФИ-32 осуществляет общую организацию работ СОИ - 5, 16, 27. Он собирает всю информацию, подготовленную ранее блоками в единую посылку, поступающую для формирования каждого информационного кадра. БФИ-32 содержит программы формирования информации вычислителей картины, выдаваемой летчику на индикаторы, а также команды для СОИ. БФИ-32 выдает текущие и допустимые значения параметров Dтек., Vд.тек., Нтек., Zтек., Dдоп., Hдоп., Zдоп., а также признаки срабатывания сигнализации при приближении к допустимым значениям этих параметров.
Состав информации, представляемой экипажам обоих ЛА - 7, 17, обеспечивает наглядную объективную картину взаимного положения самолетов, тенденцию к изменению этого положения, контролю допустимого уровня сближения, а также эффективную уведомляющую и предупреждающую световую и звуковую сигнализацию экипажам об опасной ситуации для своевременного ее парирования.
В качестве единой системы координат выбрана декартова система с центром тяжести ЛА. Тогда на индикаторе СОИ (вид сзади) ось, совпадающая с вектором скорости Vox, представляется точкой, при этом индекс первого ЛА 6 будет индицировать угол крена γ, а индекс второго ЛА - 17 будет смещен на величину H по оси OY и на Z - по оси OZ и его угловое положение будет индицировать угол крена ЛА - 17 (фиг 3, 4).
Пилоту ЛА - 6 необходимо знать положение ЛА 17 в земном пространстве, углы ЛА - 17 и местоположение ЛА как материальной точки (превышение, продольное и боковое смещение векторов движения ЛА) в опорной системе координат и программных значений параметров полета. Второму пилоту необходима та же информация, а также направление движения другого ЛА и его предполагаемые изменения в пространстве.
Для построения картины на экране СОИ - 5, 16 используется информация аппаратуры межсамолетного обмена и от других датчиков информации углов υ, γ, φ, угловые скорости, линейные перегрузки и другие параметры движения ЛА.
Форматы изображения информации экипажу представлены на фиг.3, 4 в виде мнемонического изображения положения ЛА - 6, 17. В информационном поле индикаторов размещаются силуэты самолетов, например, оранжевого цвета. Силуэт «своего» самолета располагается в центре экрана и неподвижен в горизонтальном и вертикальном направлении. Силуэт «соседнего» самолета перемещается как по вертикали (высоте), так и по горизонтали (боковому смещению). Оба силуэта имеют возможность вращения вокруг продольной оси для мнемонической демонстрации крена обоих самолетов и тенденции направления сближения (расхождения). Вблизи каждого силуэта расположен номер данного ЛА, окрашенный в оранжевый цвет (который может соответствовать номеру его «позывного») и вводится в ПТК перед полетом.
В левой нижней частях экрана располагаются шкалы «превышения» по высоте и «бокового смещения» ЛА белого цвета, отградуированные в метрах.
В зависимости от дистанции одного ЛА до другого предусматриваются два диапазона отсчета превышения и бокового смещения (например, точный - 40 м, грубый - 200 м), переключение диапазонов происходит автоматически при достижении значений высоты Н, Z=40 м. По каналам Н, Z скользят индексы отсчета оранжевого цвета, связанные с силуэтами самолетов.
Вокруг «соседнего» самолета схематично нанесена зона опасного сближения (зона ограничений), которая задается оперативно (вводится в ЦВ - 28) в зависимости от требований программы тренировки. В ПТК предусматриваются 2 уровня (порога) сигнализации «опасного» сближения: при достижении первого порога рамка зоны окрашивается, например, в красный цвет и в верхней части поля индикатора появляется надпись красного цвета «опасное сближение», сопровождаемая речевой (звуковой) сигнализацией; при достижении второго порога рамка зоны начинает работать в проблесковом режиме, надпись «опасное сближение» заменяется надписью «уход» с соответствующей речевой (звуковой) сигнализацией, а в верхней части экрана появляются стрелки с мнемоническим направлением маневра самолета для выхода из опасной зоны.
В левой части экрана располагаются счетчики заданной допустимой дистанции сближения ЛА и заданной допустимой скорости изменения дистанции, а также текущие значения этих параметров, окантованное, например, зеленой рамкой. При достижении допустимого значения дистанции сближения (достижения порогов срабатывания сигнализации) рамка сигнала окрашивается в красный цвет, а затем работает в проблесковом режиме (1 и 2 уровень).
Для мнемонической демонстрации изменения скорости дистанции сближения из силуэта «своего» самолета на «соседний» самолет направлен «вектор скорости сближения», длина которого изменяется пропорционально скорости сближения. Вектор окрашен в зеленый цвет.
Обмен информацией о взаимном положении самолетов проводится с помощью аппаратуры межсамолетного обмена - 1, 16 по информации из ЦВ - 28 ЛА - 6 и ЛА - 17 о координатах φ1, λ1, φ2, λ2, составляющих скоростей VN1, VE1, VY1, VN2, VE2, VY2; о высоте Hr1, Hr2, текущем времени Tтек.1, Ттек.2.
ПТК ЛА - 6, ЛА - 17 при проведении тренировок может выдавать управляющие сигналы в САУ и АТ - 3, 14.
Для обеспечения контроля при проведении ЛА в режиме СПС предусматривается передача с бортов двух ЛА - 6, 17 на диспетчерский пункт 26 УВД - 43 параметров φ, λ, Н, ИК, ψ, T (Гринвеческим согласованием).
Средства сбора и передачи информации на пункт УВД - 43 включают:
- бортовые радиотехнические системы (передачи)
- наземные приемные радиотехнические станции и РЛС
- линии передач радиотелеметрической информации
- системы внешнетраекторных измерений - радиотехнические и оптические
- систему единого времени
- ЭВМ
На пункте УВД - 43 проводятся преобразования координат φ, λ, Н в полярные - Д, А и строится взаимное расположение двух ЛА. Пункт УВД - 43 содержит СОИ - 26 в виде ряда графических и алфавитно-цифровых дисплеев, установленные на рабочем месте, средства документирования информации, средства для передачи управляющих сигналов на борт ЛА - 6, 17, средства связи с взаимодействующими ККС - 44, обеспечивающими летные эксперименты руководителей полета. Определяются погрешности проекций вектора относительного расположения и вектора относительной скорости, зависящие от погрешности определения координат и скорости СНС, ИНС временные задержки при получении информации с бортов ЛА - 6, 17, методические ошибки, вносимые при проведении расчетов и преобразовании координат.
Способ оценки чистоты воздуха гермокабин летательных аппаратов, поступающего от компрессоров газотурбинных двигателей, на содержание продуктов разложения смазочных масел
Система управления летным экспериментом
Поисковая экспертная система
Способ определения и сигнализации о приближении несущего винта к зоне режимов "вихревого кольца" на предпосадочных маневрах одновинтового вертолета
Способ оценки горизонтальных составляющих индуктивных скоростей на малых скоростях полёта одновинтового вертолёта
Способ определения механических напряжений в деталях, изготовленных на металлорежущих станках
Способ определения аэродинамических коэффициентов c и с на основе определения суммарной тяги двигательной установки по результатам летных испытаний летательного аппарата
Экспертная система контроля работы бортового оборудования летательных аппаратов
Способ формирования модели прогноза образования конденсационных следов (кс) самолетов гражданской авиации (га) с конкретным типом газотурбинного двигателя и конденсационных перистых облаков (кпо) с использованием количественных показателей образования кс и кпо для экологической оптимизации полетов самолетов га на конкретных трассах в различных регионах земли и возможности снижения влияния эмиссии двигателей на парниковый эффект
Система биомеханического контроля деятельности лётчика в полёте
Способ оценки чистоты воздуха гермокабин летательных аппаратов, поступающего от компрессоров газотурбинных двигателей, на содержание продуктов разложения смазочных масел
Система управления летным экспериментом
Поисковая экспертная система
Способ определения и сигнализации о приближении несущего винта к зоне режимов "вихревого кольца" на предпосадочных маневрах одновинтового вертолета
Способ оценки горизонтальных составляющих индуктивных скоростей на малых скоростях полёта одновинтового вертолёта
Способ определения аэродинамических коэффициентов c и с на основе определения суммарной тяги двигательной установки по результатам летных испытаний летательного аппарата
Экспертная система контроля работы бортового оборудования летательных аппаратов
Способ формирования модели прогноза образования конденсационных следов (кс) самолетов гражданской авиации (га) с конкретным типом газотурбинного двигателя и конденсационных перистых облаков (кпо) с использованием количественных показателей образования кс и кпо для экологической оптимизации полетов самолетов га на конкретных трассах в различных регионах земли и возможности снижения влияния эмиссии двигателей на парниковый эффект
Система биомеханического контроля деятельности лётчика в полёте
Способ искробезопасной заправки топливных баков летательного аппарата топливом под давлением

