Результат интеллектуальной деятельности: ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА
Вид РИД
Изобретение
Изобретение относится к области бортового оборудования, предназначено для установки на летательные аппараты (ЛА) и может быть использовано для функционального диагностирования технического состояния авиационного оборудования.
Уровень техники
Известна автоматизированная высокоинтеллектуальная система обеспечения безопасности полетов летательного аппарата патент РФ №2388663, В64Д 47/00, 2009, Берестов Л.М., Харин Е.Г., Якушев А.Ф. и др., которая содержит штатную систему управления ЛА, соединенную с датчиками состояния бортовых систем, блок прогноза движения ЛА за время t°, связанный выходом с блоком определения катастрофических ситуаций (КС), вычислитель параметров движения (ВПД) ЛА, связанный выходом с входами блока определения режимов полета, блока прогноза движения ЛА за время t°, переключатель, выполненный пороговым, блок сравнения, блок возврата в исходный режим полета, связанный с ВПД, первую экспертную систему (ЭС), выполненную с блоком определения режимов полета, соединенным с базой знаний (БЗ) по признакам режимов полета ЛА, вторую ЭС, выполненную с блоком выбора математической модели полета ЛА, соединенным с БЗ по математическим моделям полета ЛА и ВПД, третью ЭС, выполненную с блоком прогноза движения ЛА, блок определения КС, соединенный с БЗ по управлению по критическому параметру и БЗ по КС, связанными последовательно с блоком прогноза движения по предотвращению КС, блок сравнения, блок определения момента блокировки штатной системы управления ЛА, четвертую ЭС, выполненную с блоком управления по выводу из КС, соединенным с выходом БЗ по виду управления из КС, блок определения приближения к эксплуатационным ограничениям, соединенный с БЗ по эксплуатационным ограничениям, связанный своим входом с выходом блока прогноза движения ЛА, БЗ по управлению по недопущению выхода за ограничения, связанную с блоком формирования подсказки экипажу, второй вход которого соединен с блоком определения приближения к эксплуатационным ограничениям, а выход - с индикатором на приборной доске, задатчик эталонных характеристик и допусков (ЗЭХД), формирователь эталонных управляющих воздействий (ФЭУВ), формирователь заданной программы управления (ФЗПУ), формирователь границ допусков заданных эталонных характеристик (ФГДЗЭХ), распределительный блок, блок сравнения, логический блок, блок цифровой карты местности, накопитель информации, входом соединенный с выходом ВПД, выходы которого соединены с блоком цифровой карты местности и распределительным блоком, выходы которого соединены с входами ЗЭХД, ФЭУВ, ФЗПУ, ФГДЗЭХ, а их выходы соединены с четырьмя входами блока сравнения, пятый вход которого соединен с выходом блока цифровой карты местности, а выходом - с логическим блоком, выходы которого связаны с входом блока определения режима полета и входом индикатора на приборной доске.
Однако данная система реализации подсказки экипажу для предотвращения неблагоприятного развития особой ситуации, которая может закончиться авиационным происшествием, требует сложной системы принятия решения и эвристических подходов выбора оптимального пути локализации особой ситуации. Система не позволяет существенно повысить уровень безопасности полета ЛА при возникновении особых ситуаций, вызванных отказами системы и агрегатов ЛА и ошибочными действиями экипажа.
Известна система поддержки экипажа в опасных ситуациях патент РФ №2128854, 6С05D 1/00, 1987, Берестов Л.М., Харин Е.Г., Якушев А.Ф. и др., взятая за прототип, которая содержит датчик состояния двигателей, топливной системы, гидросистему, систему электроснабжения, систему штурвального управления, систему выпуска шасси и торможения, систему жизнеобеспечения, противообледенительную систему, противопожарную систему, блок распознавания состояния конфигурации ЛА, блок распознавания режимов полета, анализатор состояния пилотажно-навигационного оборудования, анализатор состояния аппаратуры ЛА, блок распознавания аварийной ситуации, блок прогноза состояний, состоящий из связанных блоков моделирования динамики ЛА и базу знаний (БЗ) развития аварийных ситуаций (АС), связанных друг с другом БЗ характеристик АС и БЗ предотвращения АС, вычислитель принятия решений о предотвращении АС, анализатор правильности действий по предотвращению АС, вычислитель принятия решений о переходе на автоматическое управление, блок предупреждения о нарушении правильности действий.
Однако данная система не позволяет повысить уровень безопасности полета ЛА при возникновении особых ситуаций, вызванных отказом систем и агрегатов ЛА и ошибочными действиями экипажа, за счет отсутствия на ЛА систем, обеспечивающих экипаж сигналами о приближении к предельно допустимым значениям полета, являющимся для экипажа командой для выполнения корректирующих действий по предотвращению выхода на критический режим полета.
Технический результат, на достижение которого направлено предлагаемое изобретение, - повышение безопасности полета путем снижения уровня аварийных ситуаций, вызванных человеческим фактором, функциональными отказами и внешними воздействиями.
Существенные признаки
Для достижения технического результата в интеллектуальную систему поддержки экипажа (ИСПЭ), включающую датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы выпуска шасси и торможения, противообледенительной системы, противопожарной системы, системы воздушных сигналов (СВС), спутниковую навигационную систему (СНС), инерциальную навигационную систему (ИНС), радиовысотомер (РВ), приборную систему посадки (ПСП), систему штурвального управления (СШУ), параллельно соединенные с системой сбора бортовой информации (ССБИ), систему отображения информации (СОИ), блок распознавания аварийных ситуаций (БРАС), дополнительно введены система контроля разбега (СКР), система предупреждения об опасной близости земли (СПОБЗ), система предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ), система контроля захода на посадку и посадки (СКЗП), система предупреждения о попадании в сдвиг ветра (СППСВ). При этом СКР выполнена с возможностью определять на основе измерения параметров сигналов бортовых датчиков значения: продольной и нормальной перегрузок nx, ny, воздушной V и приборной Vпp скоростей, углов тангажа ϑ, расстояний S пройденного пути ВПП с учетом заданных ограничений, собранных в ССБИ, превышения измеренных и заданных пороговых значений Vпp.oгp, Lпор, Lрасч в виде:
где Lрасч, Lпор - расчетное значение дистанции достижения скорости отрыва ЛА от поверхности ВПП и пороговое значение Lрасч;
S - расстояние, пройденное ЛА по ВПП;
Vпор, Vпр - пороговое значение воздушной скорости и приборная скорость;
nx пор - пороговое значение продольной перегрузки;
а также сигналы скорости набора или потери высоты, которые подаются в БРАС для формирования информации о качестве разбега и предупреждения об опасности и передачи в СОИ и индикации включения тревожной сигнализации. Система СПОБЗ выполнена с возможностью определять на основе измерения параметров сигналов бортовых датчиков, указывающих географическое местоположение летательного аппарата (ЛА), высоту, показываемую радиовысотомером Нрв, геодезическую высоту Нг спутниковой навигационной системы (СНС), данных измерителя вертикальной скорости Vу ЛА, приемника сигналов εг отклонения от радиотехнической глиссады посадки, внутренней базы данных о местности и препятствиях в аэропортах - минимальное значение допустимой высоты над землей в экстремальных условиях атмосферы для передачи в БРАС с целью формирования информации принятия решения об условиях близости поверхности земли, после чего информационные сигналы поступают в СОИ для индикации включения тревожной сигнализации. Система СПВОЗ выполнена с возможностью измерения параметров бортовых датчиков углов атаки α, углов крена γ, нормальной перегрузки ny, угловой скорости тангажа ωz; определения предельно допустимых разностей между опасными и пороговыми значениями по параметрам сигналов угла атаки α и ее производной  , сигналов вертикальной перегрузки ny и ее производной
, сигналов вертикальной перегрузки ny и ее производной  и допустимых значений сигналов угла атаки αдоп, сигналов допустимых значений продольной перегрузки nх доп, зависящих от числа Μ и веса ЛА, фильтрует сигналы угловой скорости ωz, передаваемые в БРАС для формирования информации предупреждения о выходе на опасные углы атаки и перегрузки. После чего сигналы подаются в СОИ для индикации включения тревожной сигнализации. Система СКЗП выполнена с возможностью на основе измерения параметров сигналов бортовых датчиков отклонения в пространстве траектории ЛА, выдаваемых приемником курсоглиссадных радиомаяков, бортовой спутниковой навигационной системы (СНС), датчиком радиовысотомера Нрв, датчиком барометрической высоты, датчиком воздушной скорости V, положения шасси и закрылков в БРАС, формирует сигналы принятия решений об условиях выхода за пределы допустимых отклонений, передаваемые в СОИ для индикации включения тревожной сигнализации, в директорные приборы и блок включения систем автоматического управления (САУ). Система СППСВ выполнена с возможностью на основе измерения параметров бортовых датчиков приборной скорости Vпp и ее производной, вертикальной скорости Vy приращения углов атаки Δα, определяет превышение измеренных и заданных значений при попадании ЛА в условия сдвига ветра, формировать в БРАС сигнал принятия решения о критичности условий попадания в сдвиг ветра, передавая их в СОИ для индикации включения тревожной сигнализации. Входы перечисленных систем вместе с первым входом БРАС соединены с выходами ССБИ. Выходы указанных систем соединены со вторыми входами БРАС, а выход его подключен к СОИ, установленной перед летчиком экипажа, взаимодействующего с СШУ. Кроме того, структура БРАС построена в виде двухуровневой системы, в которой на первом уровне распознавания реализуют контроль состояния ЛА и режимов работы его подсистем, а на втором уровне распознавания проводят контроль отказов, контроль за выполнением режимов полета, контроль критических значений параметров полета. Таким образом, ИСПЭ является управляющей системой с параллельной оценкой работоспособности бортового оборудования, работы экипажа, прогнозирования аварийных ситуаций, условий полета и выработки рекомендаций вывода из опасных ситуаций за пределом области эксплуатационных ограничений. ИСПЭ оценивает состояние всех систем ЛА.
и допустимых значений сигналов угла атаки αдоп, сигналов допустимых значений продольной перегрузки nх доп, зависящих от числа Μ и веса ЛА, фильтрует сигналы угловой скорости ωz, передаваемые в БРАС для формирования информации предупреждения о выходе на опасные углы атаки и перегрузки. После чего сигналы подаются в СОИ для индикации включения тревожной сигнализации. Система СКЗП выполнена с возможностью на основе измерения параметров сигналов бортовых датчиков отклонения в пространстве траектории ЛА, выдаваемых приемником курсоглиссадных радиомаяков, бортовой спутниковой навигационной системы (СНС), датчиком радиовысотомера Нрв, датчиком барометрической высоты, датчиком воздушной скорости V, положения шасси и закрылков в БРАС, формирует сигналы принятия решений об условиях выхода за пределы допустимых отклонений, передаваемые в СОИ для индикации включения тревожной сигнализации, в директорные приборы и блок включения систем автоматического управления (САУ). Система СППСВ выполнена с возможностью на основе измерения параметров бортовых датчиков приборной скорости Vпp и ее производной, вертикальной скорости Vy приращения углов атаки Δα, определяет превышение измеренных и заданных значений при попадании ЛА в условия сдвига ветра, формировать в БРАС сигнал принятия решения о критичности условий попадания в сдвиг ветра, передавая их в СОИ для индикации включения тревожной сигнализации. Входы перечисленных систем вместе с первым входом БРАС соединены с выходами ССБИ. Выходы указанных систем соединены со вторыми входами БРАС, а выход его подключен к СОИ, установленной перед летчиком экипажа, взаимодействующего с СШУ. Кроме того, структура БРАС построена в виде двухуровневой системы, в которой на первом уровне распознавания реализуют контроль состояния ЛА и режимов работы его подсистем, а на втором уровне распознавания проводят контроль отказов, контроль за выполнением режимов полета, контроль критических значений параметров полета. Таким образом, ИСПЭ является управляющей системой с параллельной оценкой работоспособности бортового оборудования, работы экипажа, прогнозирования аварийных ситуаций, условий полета и выработки рекомендаций вывода из опасных ситуаций за пределом области эксплуатационных ограничений. ИСПЭ оценивает состояние всех систем ЛА.
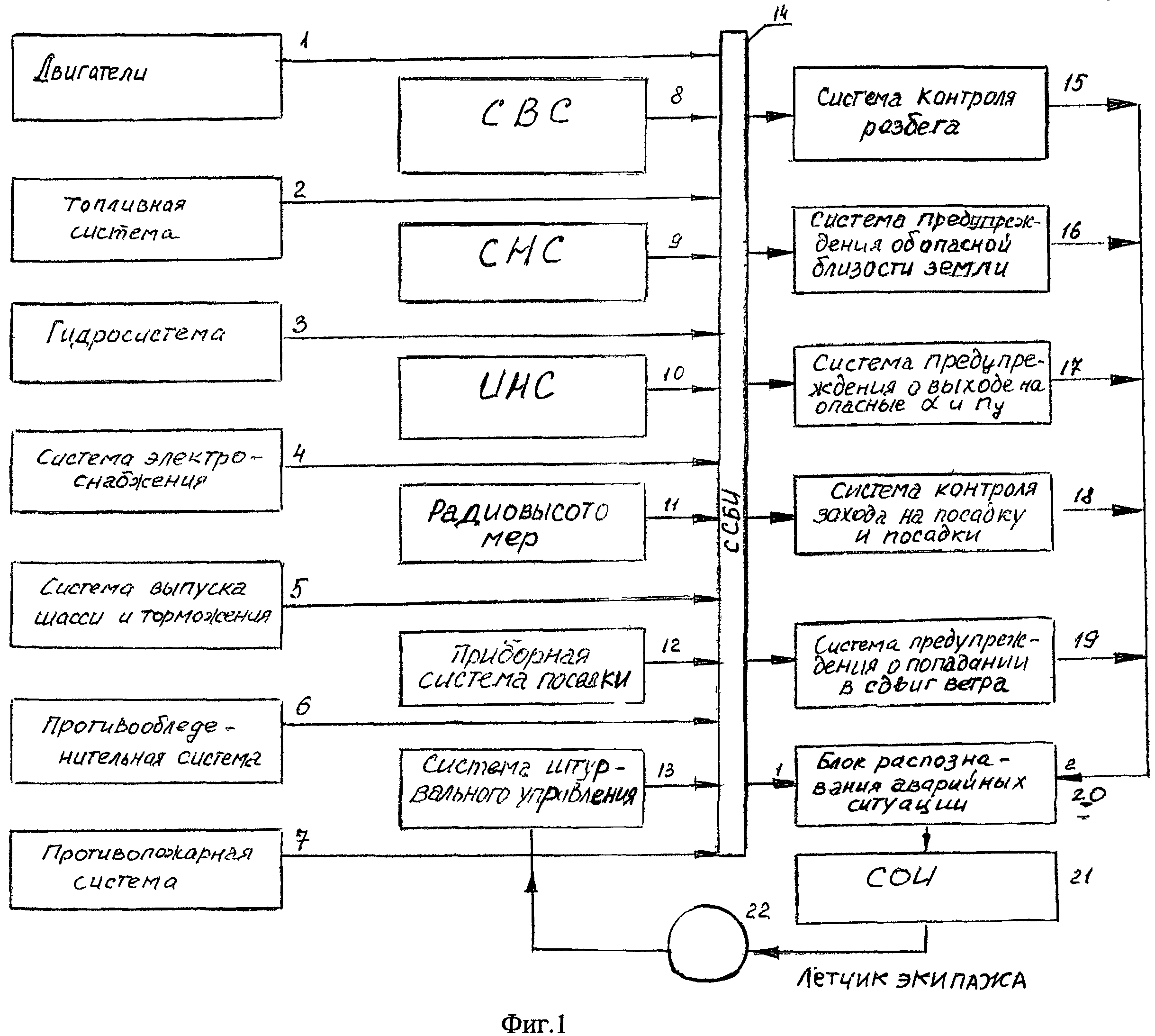
Для пояснения сущности изобретения на фиг. 1 приведена структурная схема интеллектуальной системы поддержки экипажа.
1 - двигатели
2 - топливная система
3 - гидросистема
4 - система электроснабжения
5 - система выпуска шасси и торможения
6 - противообледенительная система
7 - противопожарная система
8 - система воздушных сигналов (СВС)
9 - спутниковая навигационная система (СНС)
10 - инерциальная навигационная система (ИНС)
11 - радиовысотомер (РВ)
12 - приборная система посадки (ПСП)
13 - система штурвального управления (СШУ)
14 - система сбора бортовой информации (ССБИ)
15 - система контроля разбега (СКР)
16 - система предупреждения об опасной близости земли (СПОБЗ)
17 - система предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ)
18 - система контроля захода на посадку и посадке (СКЗП)
19 - система предупреждения о попадании в сдвиг ветра (СППСВ)
20 - блок распознавания аварийных ситуаций (БРАС)
21 - система отображения информации (СОИ)
22 - летчик экипажа
Предлагаемая интеллектуальная система поддержки экипажа включает датчики состояния систем двигателей 1, топливной системы 2, гидросистемы 3, системы электроснабжения 4, системы выпуска шасси и торможения 5, противообледенительной системы 6, противопожарной системы 7, системы воздушных сигналов (СВС) 8, спутниковой навигационной системы (СНС) 9, инерциальной навигационной системы (ИНС) 10, радиовысотомера (РВ) 11, приборной системы посадки (ПСП) 12, системы штурвального управления (СШУ) 13, соединенные с входами системы сбора бортовой информации (ССБИ) 14, блок распознавания аварийных ситуаций (БРАС) 20, систему отображения информации (СОИ) 21, систему контроля разбега (СКР) 15, систему предупреждения об опасной близости земли (СПОБЗ) 16, систему предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ) 17, систему контроля захода на посадку и посадке (СКЗП) 18, систему предупреждения о попадании в сдвиг ветра (СППСВ) 19, их выходы соединены со вторыми входами БРАС 20, первый вход БРАС 20 соединен с выходом ССБИ 14, а выход БРАС 20 соединен с входом СОИ 21, установленной перед летчиком 22 экипажа, взаимодействующего с СШУ 13.
Система работает следующим образом
Интеллектуальная система поддержки экипажа (ИСПЭ) строится на знаниях, объединяющих теоретическое понимание проблемы и набор видов особых ситуаций, распознание которых доказано практикой данной предметной области в процессе расследования авиационных происшествий, инцидентов и использования результатов автоматизированного экспресс-анализа полетной информации для контроля действий экипажа и работоспособности систем воздушного судна. ИСПЭ создается путем получения знаний от экспертов и кодирования их в форме, допускающей использование в современных вычислителях, а также от информации бортовых систем контроля оборудования.
Применение знаний экспертов для формирования стратегии решения задачи является главной чертой интеллектуальных систем. Задача сводится к выработке подходов идентификации особых ситуаций, которые могут возникнуть в полете и своевременной подсказки экипажу о необходимых действиях по их локализации. Каждое решение принимается на основе исходных данных, представляющих собой полетную информацию, как правило, индицируемую на приборных досках экипажа. Самым важным элементом решения является оценка сложившейся особой ситуации и формирование для экипажа подсказки, однозначно позволяющей парировать эту ситуацию благодаря реализации полученных экипажем рекомендаций.
Применительно к ИСПЭ это означает решение следующих задач:
- выявления и анализ отклонений в работе подсистемы «воздушное судно-экипаж», влияющих на безопасность полетов;
- разработка автоматизированных методов идентификации особых ситуаций на стадии их начального развития, вмешательство в парирование которых может предотвратить авиационное происшествие;
- разработка содержания подсказки экипажу для предотвращения неблагоприятного развития особой ситуации, которая может закончиться авиационным происшествием.
Анализ статистики летных происшествий в авиации показывает, что значительное число происшествий обусловлены ошибками летного состава, диспетчеров и обслуживающего персонала при практически исправной авиационной технике. Это требует установки на борт ЛА систем 15, 16, 17, 18, 19, обеспечивающих экипаж сигналами о приближении к предельно допустимым значениям полета. Сформированные в этой системе ИСПЭ предельно допустимые значения параметров сопоставляются с текущими их значениями, и, в зависимости от величины разности между ними и скорости ее изменения, вырабатываются предупреждающие сигналы, являющиеся для экипажа командой для выполнения корректирующих действий по предотвращению выхода на критический режим полета. В процессе принятия решения и выполнения корректирующих действий экипаж имеет информацию о текущих и предельно допустимых значениях параметров полета. На ЛА устанавливаются система контроля разбега (15), система предупреждения о приближении к опасным значениям угла атаки и нормальной перегрузки, приборной скорости и числа М(17), система сигнализации опасной близости земли (16), система о попадании в «опасный» сдвиг ветра (19), система контроля захода на посадку и посадки (18).
Несмотря на отдельные особенности указанных систем, в каждой из них тот или иной параметр сравнивается с соответствующим пороговым значением, и в случае его превышения выдается предупреждающий сигнал, т.е. они представляют системы контроля. Оценками эффективности систем предупреждения критических режимов являются критерии вероятности пропуска опасной ситуации и ложного срабатывания системы. Критическим значением параметра является превышение некоторого значения с вероятностью, близкой к единице, который приведет к аварийной ситуации (сваливание, перегрузка элементов конструкции). Опасное значение - требующее предельных, чрезвычайных мер для предотвращения выхода за критическое значение параметра. Пороговое значение - такое, при котором система сигнализации допуска должна срабатывать по своему назначению. ИСПЭ в нормальных условиях полета остается пассивной и наблюдает за состоянием ЛА, за режимом работы двигателей, работы оборудования и экипажа. Если все системы и агрегаты ЛА работают нормально и пилотирование осуществляется таким образом, что не прогнозируется выход параметров движения ЛА за критические значения, ИСПЭ определяет нормальное выполнение режима.
При возникновении аварийной ситуации (АС) ИСПЭ оценивает информацию о внешней и внутренней среде. Когда прогноз показывает, что ЛА выходит за пределы эксплуатационных ограничений, ИСПЭ формирует решения и выдает рекомендации по минимизации неблагоприятных последствий (блок 20). В ИСПЭ моделируется поведение системы «ЛА - бортовое оборудование (БО)» и выдается прогноз развития событий в полете на блоке СОИ 21 отображения информации о состоянии БО, работе двигателей и параметров, характеризующих поведение ЛА. Если экипаж предпринимает правильные действия или действия в направлении развития указанной ситуации, то ИСПЭ не вмешивается в управление ЛА, а выдает рекомендации и подсказки экипажу по пилотированию ЛА. В случае отсутствия реакции ИСПЭ в исключительных случаях формирует необходимые корректирующие и управляющие сигналы в систему по парированию опасной ситуации и стабилизации полета ЛА.
В алгоритмах ИСПЭ последовательно анализируются признаки возникновения АС. Каждый из признаков с определенной достоверностью PACi определяет наличие такой ситуации. Если суммарная достоверность достигает заданной пороговой величины PACi>PKP, то констатируется наличие данной ситуации. После этого анализируются условия полета (параметры движения: высота, скорость, угловое положение и др., остаток топлива, метеоусловия, наличие препятствий на ВПП, положение рулей, шасси и других агрегатов ЛА и т.д.) и формируется рекомендация экипажу - подсказки более высокого уровня. Система сбора бортовой информации (ССБИ), блок 14 - мультиплексный канал связи - система, в которой распространяются сигналы от передатчика (блоки 1-13) к приемнику. В ней организуется одновременная передача нескольких независимых сообщений, каждое из которых следует по своему каналу. На одной линии канала может быть очень много сообщений. Это дуплексные каналы с одновременной связью в прямом и обратном направлении.
Каналы связи с отправлением и получателем образуют систему ССБИ-14. Независимые сообщения C1-С13 многоканальной системы связи от (частотное уплотнение) N=13 источников (отправителей) подаются на входы передатчиков и там преобразуются (модуляция) в соответствующие этим сообщениям сигналы S1÷S13. Сигналы всех передатчиков поступают в линии связи. С линией связи смесь всех N каналов поступают на входы приемников, там сигналы разделяются селекторами, преобразуются (демодуляция) и выдается получателям. Приемники воспроизводят переданные сообщения.
Основное назначение СКР (блок 15) - предупреждение летных происшествий, связанных с превышением располагаемых дистанций летной полосы аэродрома, из-за принятия экипажем ошибочных решений на прерывание или продолжение взлета или несвоевременного обнаружения экипажем опасных отклонений параметров разбега от их номинальных значений. СКР 15 на основе измерения параметров разбега выдает экипажу сигнал предупреждения и командные сигналы на прерывание или продолжение взлета в случае обнаружения опасного отклонения от его расчетного значения, введенного в систему перед полетом. Показатель качеств выбирается в зависимости от типа ЛА и условий его эксплуатации: это разность между измеренным продольным (nх) и его пороговым значением (nx пор) перегрузок, задаваемым в функции приборной скорости Vпр:

разность между измеренным значением воздушной скорости V (блок 8) и ее пороговым значением Vпор, задаваемым в функции пройденного по ВПП расстояния S:

разность между вычисленным значением дистанции достижения заданной скорости Lрасч, расчетной скорости отрыва ЛА от поверхности ВПП (Vотр) и ее пороговым значением:
где Lрасч=f(nx, Vп, V, S, Vотр) - функция измеренных значений параметров процесса разбега, Vп - путевая скорость. Сигнал продольного ускорения nx формируется в СКР с помощью датчика перегрузки, чувствительная ось которого направлена вдоль строительной оси ЛА и датчика угла тангажа в соответствии с формулой:

где nx, ϑ - сигналы датчиков перегрузки и угла тангажа (в радианах) соответственно, g - ускорение свободного падения.
Сигналы путевой скорости и пройденного по ВПП расстояния получаются в СКР с помощью последовательного сигнала продольного ускорения, а затем и сигнала путевой скорости.
В сигнале продольной перегрузки αх содержатся значительные помехи, вызванные вибрациями фюзеляжа ЛА при разбеге и имеющие широкий спектр частот, поэтому в канале измерения низкочастотного полезного сигнала необходимой является установка заграждающего фильтра низких частот вида:
Определение истинной воздушной скорости V ЛА при разбеге происходит от датчика приборной скорости, который измеряет разность полного и статического давлений воздуха, воспринимаемых приемником воздушных давлений (ПВД) (блок 8):

где Δ=0,38 Рo/To - относительная плотность воздуха; Vпр - приборная скорость ЛА; ΔVa - параметры, связывающие V с измеренными значениями приборной скорости.
Система предупреждения об опасной близости земли (СПОБЗ) (блок 16) воздушного судна является средством повышения безопасности полетов, обеспечивая с помощью звуковых и визуальных сигналов предупреждения членов экипажа о возникновении таких условий полета, развитие которых может привести к столкновению с земной или водной поверхностью.
Опасность определяется тем, позволяют ли характеристики ВС при данных расстояниях от препятствия и скорости сближения предотвратить непреднамеренное столкновение с ним. Для подавляющего числа случаев опасного сближения с землей, задача решается на основе информации радиовысотомера 10), измерителя вертикальной скорости ЛА и приемника сигналов отклонения от радиотехнической глиссады посадки (блок 12).
СПОБЗ использует входные сигналы от самолетных систем, определяющих географическое местоположение, пространственную ориентацию, высоту, воздушную скорость и глиссаду. Эти данные используются совместно с внутренними базами данных о местности, препятствиях и аэропортах для предупреждения потенциального пересечения траектории полета ЛА с местностью или препятствием. Определив такую возможность, система СПОБЗ выдает визуальный и звуковой предупреждающий или аварийный тревожный сигнал.
Система выдает тревожные сигналы при преднамеренных отклонениях от глиссады ниже высоты полета с закрылками или шасси, находящимися в непосадочной конфигурации, выдает подсказки об угле крена и высоте.
В системе обеспечивается определение минимально допустимой высоты пролета над местностью. Это дополнительный элемент защиты, предупреждающий летчика о возможности преждевременного снижения, предназначен для неточных заходов на посадку и базируется на текущем местоположении самолета относительно ближайшей ВПП.
Геометрическая высота, определяемая СНС (блок 9), представляет собой вычисленную псевдобарометрическую высоту, предназначенную для устранения ошибок измерения высоты, вызываемых экстремальными значениями температуры, нестандартными условиями давления и неправильной выставкой высотомера. Эти свойства обеспечивают оптимальную выдачу тревожных сигналов и индикацию.
Как минимум система выполняет основные функции тревожной сигнализации:
- функцию переднего обзора местности для предотвращения столкновения, которая охватывает недостаточный запас высоты при пролете местности, угрозу столкновения с местностью;
- функцию тревожной сигнализации о преждевременном снижении;
- чрезмерную вертикальную скорость снижения Vy;
- чрезвычайную скорость сближения с местностью;
- отрицательную скорость набора высоты или потерю высоты после взлета;
- сближение с местностью при полете в непосадочной конфигурации;
- чрезмерное отклонение вниз от глиссады системы посадки;
- снижение самолета до высоты, относительно возвышения местности или ближайшей ВПП (речевая подсказка).
Режим работы СПОБЗ:
1 - чрезмерная скорость снижения;
2 - чрезмерная скорость сближения с землей;
3 - полет на высоте менее 200 м при заходе на посадку с убранными шасси или закрылками;
4 - отрицательная вертикальная скорость при потере высоты на взлете до высоты менее 200 м;
5 - чрезмерное отклонение вниз от радиотехнической глиссады посадки.
В режиме 1 срабатывание сигнализации происходит при условии: Нрв≤hоп1=Ф1(Vy), в режиме 2: Нрв≤hоп2=Ф2(Vсбл), в режиме 3: Нрв≤hоп=Ф3(εг), где εг - угловое отклонение от глиссады; Ф1(Vу), Ф2(Vсбл), Ф3(εг) - зависимости опасной высоты от вертикальной скорости, от скорости сближения с землей, от отклонения от глиссады.
Для компенсации запаздывания в сигналах производной барометрической высоты и подавления помех, обусловленных искажениями давления при его измерении ПВД, вертикальная скорость формируется комплексированием барометрической и инерциальной информации:

где - производная сигнала барометрической высоты; αy - вертикальное ускорение в земных осях; p - оператор дифференцирования; k1 и k2 - параметры фильтра, выбираемые из условия минимума средней квадратической погрешности в сигнале Vy.
- производная сигнала барометрической высоты; αy - вертикальное ускорение в земных осях; p - оператор дифференцирования; k1 и k2 - параметры фильтра, выбираемые из условия минимума средней квадратической погрешности в сигнале Vy.
Сигнал скорости сближения с землей формируется путем комплексирования производной сигнала радиовысотомера и сигнала вертикальной скорости. Это необходимо для фильтрации флуктуационной составляющей в производной сигнала радиовысотомера, обеспечивая при этом практически отсутствие запаздывание в сигнале Cсбл при собственном движении самолета
где  - сигнал радиовысотомера (11), Τ - параметр фильтра, зависящий от режима полета.
- сигнал радиовысотомера (11), Τ - параметр фильтра, зависящий от режима полета.
Каждый из режимов работы системы оценивается отдельно, т.к. предельно допустимое значение высоты является функцией различных параметров, а следовательно, разными будут и законы распределения погрешностей срабатывания системы.
К критическим режимам полета, определяемым в блоке 17, относятся:
- полет на больших углах атаки с возможным попаданием самолета в сваливание;
- выполнение энергичных маневров крена с выходом на большие угловые скорости ωz и заметным проявлением взаимодействия продольного и бокового движения.
Сваливание - самопроизвольное развитие процессов по тангажу, рысканию и крену. Рассматривая физическую природу явления сваливания при выходе самолета на закритические углы атаки, можно выделить несколько видов:
- сваливание, обусловленное потерей несущих свойств крыла;
- сваливание типа авторотации из-за потери демпфирования движения крена;
- сваливание из-за потери боковой колебательной устойчивости;
- сваливание из-за поперечной управляемости;
- сваливание из-за потери путевой устойчивости.
Фактором, приводящим к преждевременному сваливанию, может быть подхват по тангажу из-за нелинейности моментной характеристики самолета по углу атаки. Поведение самолета на больших углах атаки зачастую определяется совокупностью нескольких видов.
При превышении допустимых углов атаки (αдоп меньше αсв) обеспечивается эффективная сигнализация о приближении к предельным режимам полета. Когда используется сигнал угла атаки, необходимо введение опережения, поскольку важны не столько текущий угол атаки, сколько своевременный прогноз его изменения. Для этой цели используется сигнал датчика угловой скорости ωz, пропускаемой через фильтр. С допустимым значением αдоп сравнивается текущее значение упрежденного угла атаки:
Системой предупреждения о выходе на опасные значения угла атаки и нормальной перегрузки (блок 17) реализуются следующие законы срабатывания сигнализации:
где αдоп, ny доп - предельно допустимые значения угла атаки и нормальной перегрузки; αср, nуср - текущие значения угла атаки и нормальной перегрузки, при которых должна срабатывать сигнализация; Δα, Δny - статический запас на срабатывание сигнализации; кα, wф1(p), kn
 , wф2(ρ) - коэффициенты усиления и передаточные функции фильтров сигналов упреждения (
, wф2(ρ) - коэффициенты усиления и передаточные функции фильтров сигналов упреждения ( и
и  ).
).
Необходимо отметить, что суммы  и
и  представляют собой разность между опасным и пороговым значениями параметров, которая учитывает суммарную погрешность формирования αср и nуср и динамики их изменения. На указатель угла атаки и перегрузки выводятся текущие (α и ny) и предельно допустимые (αдоп и ny
доп) значения угла атаки и нормальной перегрузки. Передаточные функции wф1(p) и wф2(p) выбираются и оцениваются из двух противоречивых требований: подавление помех в сигналах α и ny и пропускания полезных составляющих. Поскольку предельно допустимые значения угла атаки, как правило, зависят от числа М, а ny
доп является функцией веса самолета, погрешность срабатывания сигнализаторов зависит от погрешностей вычисления аргументов этих функций, поэтому точность формирования этих параметров определяется в процессе испытаний.
представляют собой разность между опасным и пороговым значениями параметров, которая учитывает суммарную погрешность формирования αср и nуср и динамики их изменения. На указатель угла атаки и перегрузки выводятся текущие (α и ny) и предельно допустимые (αдоп и ny
доп) значения угла атаки и нормальной перегрузки. Передаточные функции wф1(p) и wф2(p) выбираются и оцениваются из двух противоречивых требований: подавление помех в сигналах α и ny и пропускания полезных составляющих. Поскольку предельно допустимые значения угла атаки, как правило, зависят от числа М, а ny
доп является функцией веса самолета, погрешность срабатывания сигнализаторов зависит от погрешностей вычисления аргументов этих функций, поэтому точность формирования этих параметров определяется в процессе испытаний.
Система контроля захода на посадку и посадки (блок 12) получает информацию при заходе на посадку в условиях ограниченной видимости с помощью наземных курсоглиссадных радиомаяков, когда создаются электромагнитные поля, формирующие заданную траекторию полета в пространстве. Измерение отклонений самолета от заданной траектории захода на посадку с помощью радиотехнических средств производится в угломерной системе координат, где V1 и V2 обозначены проекции вектора скорости самолета, нормальные их линиям, соединяющим самолет с КРМ и ГРМ соответственно:
Учитывая малость углов (θ+εг) и (ψ+εл), после преобразований получаем систему уравнений:
В уравнениях τ=D/V есть оставшееся время полета до соответствующего радиомаяка при условии движения самолета с постоянной скоростью, равной скорости в рассматриваемый момент времени. Уравнения являются уравнениями кинематики захода на посадку по курсоглиссадным радиомаякам. Переменные τ1 и τ2 во времени коэффициенты характеризуют контур управления наведения самолета на ВПП, являющийся нестационарной динамической системой. Управление траекторией полета осуществляется либо автоматически с помощью автопилота, либо отрабатывающего команды вычислителя траекторного управления, либо летчиком, управляющим самолетом по директорному прибору.
Сигналы предупреждения вырабатываются системой при значениях текущей высоты ниже установленных минимально допустимых значений или при отклонении вниз от равносильной зоны радиотехнической глиссады (РТГ), превышающем установленные максимально допустимые значения. Выдача сигналов предупреждения системой продолжается непрерывно до устранения причины, вызывающей предупреждение.
Минимально допустимые значения высоты полета и максимально допустимые отклонения вниз от РТГ автоматически вычисляются системой в течение полета на основе текущих значений сигналов бортового приемника СНС, радиовысотомера, датчика барометрической высоты, датчика воздушной скорости (или числа М), бортового посадочного радиоприемника, а также в зависимости от положения шасси и закрылков.
Основными внешними возмущениями, приводящими к рассеиванию траектории полета, являются ветровые возмущения и искривления полей курсоглиссадных радиомаяков. Интенсивность этих возмущений, оцениваемых величиной средней скорости ветра, а также среднеквадратическими отклонениями величины порывов ветра и искривлениями полей радиомаяков, является случайным фактором.
Успешность захода на посадки определяется выполнением следующих требований:
- отклонения от заданной траектории захода на посадку таковы, что не происходит срабатывание сигнализации о достижении предельных отклонений;
- устройства контроля исправности аппаратуры системы захода на посадку не отключают аппаратуру, необходимую для выполнения безопасного захода на посадку;
- скорость полета при заходе на посадку не выходит за пределы собственных ограничений.
Система предупреждения экипажа о попадании в сдвиг ветра (блок 19) при пилотировании определяет изменение во времени направления и скорости ветра в области воздушного пространства, где находится ЛА. В метеорологическом аспекте «сдвиг» ветра представляет собой изменение скорости и (или) направления ветра в функции высоты или расстояния.
Поскольку с темпом изменения скорости и направления ветра изменяются воздушная скорость и угол атаки самолета, а следовательно, подъемная сила и лобовое сопротивление, то в том же темпе происходит нарушение баланса сил, действующих на самолет. На этапах взлета и посадки при ограниченном запасе высоты неожиданное для экипажа попадание в сдвиг ветра и отсутствие на приборной доске явных признаков для его обнаружения приводят к летным происшествиям.
Наиболее опасными считаются изменения продольной и вертикальной составляющих ветра. Изменение боковой составляющей ветра менее опасно.
Для самолета, летящего с постоянной воздушной скоростью в продольной плоскости и попадающего в сдвиг ветра, относительное изменение баланса сил вдоль вектора путевой скорости определяется:
где Ρ - тяга силовой установки самолета; Q - лобовое сопротивление; G - вес самолета;  ,
,  - проекции скорости ветра на оси скоростной системы координат.
- проекции скорости ветра на оси скоростной системы координат.
Следовательно, в качестве параметра, характеризующего суммарное воздействие сдвига ветра на ЛА, определяется:
где Δαw - приращение угла атаки за счет составляющей скорости ветра Wy.
Обнаружения сдвига ветра на борту ЛА в процессе полета сводится к косвенным измерениям отдельных составляющих указанной суммы, характеризующих сдвиг ветра.
Продольная составляющая скорости ветра может быть определена:
где Vп и V - соответственно модули путевой и воздушной скоростей.
Производная скорости ветра определяется без изменения путевой скорости:

где nx - продольная перегрузка в связанных осях; (nx-ϑ) g - приближенное выражение производной путевой скорости полета самолета (угол в радианах), ϑ - угол тангажа.
Приращение угла атаки за счет вертикальной составляющей скорости ветра определяется:
где θ=Vy/Vп,
Vy - вертикальная составляющая воздушной скорости.
Таким образом, суммарная характеристика сдвига ветра определяется на основе бортовых измерений:

Система предупреждения экипажа о попадании в сдвиг ветра производит сравнение измеренного и вычисленного сигналов о сдвиге ветра с предельно допустимым его значением.
Допустимое значение сдвига ветра зависит от энергетических возможностей самолета и силовой установки. Т.е. может ли в данных условиях быть создан избыток тяги, достаточный для парирования сдвига ветра:
Предельно допустимое значение зависит также от параметров полета. В случае если при заходе на посадку фактическая приборная скорость превышает заданное значение, допускается полет при большом сдвиге ветра, приводящем к снижению вертикальной скорости. Аналогична зависимость допустимых значений сдвига ветра от отклонений от глиссады посадки, заданной вертикальной скорости. Существенную роль при определении допустимых значений играет и направление (знак) сдвига ветра, т.е. тенденция к увеличению или уменьшению приборной скорости.
Анализ погрешностей измерения параметров nx, α,  , Vy показывает, что они, как правило, постоянны в процессах захода на посадку и взлете. Компенсация этих погрешностей обеспечивается с помощью изодромного звена Тр/(Тр+1), параметр Τ которого зависит от величины сигнала δ∑ на входе системы.
, Vy показывает, что они, как правило, постоянны в процессах захода на посадку и взлете. Компенсация этих погрешностей обеспечивается с помощью изодромного звена Тр/(Тр+1), параметр Τ которого зависит от величины сигнала δ∑ на входе системы.
Введение изодромного звена позволяет исключить из рассмотрения малые значения сдвига ветра или погрешности его измерения.
Команда на сигнализацию, предупреждающую экипаж, поступает при выполнении условия:

где  δпор зависит от типа самолета, величины и знака отклонений от заданных значений приборной и вертикальной скоростей, высоты и режима полета.
δпор зависит от типа самолета, величины и знака отклонений от заданных значений приборной и вертикальной скоростей, высоты и режима полета.
Сигнал на индикатор, обеспечивающий экипажу парирование влияния сдвига ветра, формируется следующим образом:

где Vзад - заданное на данном режиме полета значение приборной скорости; Vпр измеренная приборная скорость.
Информационная избыточность навигационных и пилотажных комплексов обеспечивает высокую надежность измерений параметров движения. Особенно ответственным звеном здесь являются средства индикации пилотажно-навигационной обстановки на приборной доске летчика (СОИ-21), которые создают летчику информационную модель полета, т.е. наряду с требованиями надежности к ним предъявляются требования наглядности, емкости и доходчивости воспроизведения летчику текущей обстановки. От этого зависит эффективность его действий, особенно в критических ситуациях. Повышению информативности и наглядности индикации способствует интегрирование информации на данном режиме полета.
БРАС (20) управляющая структура на основе базы данных - процедурная программа (ПП), где управление сильно локализовано. Основным средством управления является последовательный порядок выполнения инструкций, таких как: «Если-то-иначе-делать-повторять-пока», которые работают с частью параметров, описывающих данную ситуацию. Ход выполнения инструкции связан с данными, небольшие изменения входных данных мало влияют на выполнение программы. Механизм управления «прозрачен», и информация растворена в самих процедурах и используемых предоставленных данных.
Структура БРАС построена по алгоритмам в виде двухуровневой системы, в которой на первом уровне реализуют контроль состояния ЛА и режимов работы его подсистем, на втором уровне проводят контроль отказов, контроль за выполнением режимов полета, контроль критических значений параметров полета.
В процессе работы БРАС (20) выполняет контроль состояния ВС, режимов работы его подсистем силовой установки, функционирования оборудования и параметров полета. При этом анализируются условия полета и формируются соответствующие информационные сообщения. Обработка и анализ информации осуществляется с минимальными вычислительными затратами, в реальном времени, чтобы своевременно распознать особую ситуацию и выдать экипажу необходимое сообщение о требуемых действиях по парированию возникшей ситуации.
Алгоритмы БРАС (20) сгруппированы по разделам: контроль отказов, контроль выполнения режимов полета, критических значений параметров полета. Алгоритмы реализованы в виде двух уровневой системы, которая на первом уровне определяет режим полета (разбег, взлет, начальный набор высоты и т.д.), а затем на втором уровне, в соответствии с определенным режимом полета, проверяет наличие особых ситуаций. Далее приведены несколько алгоритмов, включающих в себя те признаки и параметры, значения которых проверяются в данном условии, а также информационное сообщение, выдаваемое на индикацию при выполнении условия. Алгоритм распознавания особой ситуации, связанной с отказом, представляет собой логическое правило проверки соответствующих признаков (возникновение определенной ситуации).
1. Отсутствие электропитания 27 В.
ОСотк 1=i27, где i27 - сигнал отсутствия напряжения на одной из шин постоянного тока 27 В.
Сообщение: « Отсутствие напряжения 27 В»
2. Отсутствие электропитания 36 В.
ОСотк 2=i36, где i36 - сигнал отсутствия напряжения на одной из шин переменного тока 27 В
Сообщение: «Отсутствие напряжения 36 В»
3. Не включен обогрев приемника полного давления (ППД)(4).
ОСотк 4=iппд, где iппд - сигнал отсутствия включенного состояния обогрева ППД.
Сообщение: «Включи обогрев ППД».
4. Отказ двигателя (5).
ОСотк 5=iотк. дв.1 V i отк. дв. 2 V i отк. дв.3, где i отк. дв. - интегральный сигнал отказа двигателя 1, 2, 3 (стружка в масле, опасная вибрация двигателя, повышенная температура газа на выходе из двигателя), V - логическое «ИЛИ»
Сообщение: «Отказ двигателя».
5. Отказ гидросистемы (14).
ОСотк 14.=i отк. гидр. сист., где i отк. гидр. сист. - сигнал отказа гидросистемы.
Сообщение: «Отказ гидросистемы».
6. Неприменение пожаротушения при пожаре в мотогондоле двигателя (19)
ОС отк 19=i пож. МГ… ^ i пож.тушения, где i пож.тушения - включение пожаротушения. «^» - логическое « И»
Сообщение: «Пожар в мотогондоле. Включи пожаротушение».
Интеллектуальная система поддержки экипажа (ИСПЭ), включающая датчики состояния двигателей, топливной системы, гидросистемы, системы электроснабжения, системы выпуска шасси и торможения, противообледенительной системы, противопожарной системы, системы воздушных сигналов (СВС), спутниковую навигационную систему (СНС), инерциальную навигационную систему (ИНС), радиовысотомер (РВ), приборную систему посадки (ПСП), систему штурвального управления (СШУ), параллельно соединенные с системой сбора бортовой информации (ССБИ), систему отображения информации (СОИ), блок распознавания аварийных ситуаций (БРАС), отличающаяся тем, что дополнительно введены система контроля разбега (СКР), система предупреждения об опасной близости земли (СПОБЗ), система предупреждения о выходе на опасные значения угла атаки и перегрузки (СПВОЗ), система контроля захода на посадку и посадки (СКЗП), система предупреждения о попадании в сдвиг ветра (СППСВ), при этом СКР выполнена с возможностью определения, на основе измерения параметров сигналов бортовых датчиков: продольной и нормальной перегрузок n, n, воздушной V и приборной V скоростей, углов тангажа ϑ, расстояний S пройденного пути ВПП с учетом заданных ограничений, собранных в ССБИ, превышения измеренных и заданных пороговых значений: V, L, L в виде: где L L - расчетное значение дистанции достижения скорости отрыва ЛА от поверхности ВПП и пороговое значение L;S - расстояние, пройденное ЛА по ВПП;VV - пороговое значение воздушной скорости и приборная скорость;n - пороговое значение продольной перегрузки; а также сигналы скорости набора или потери высоты, которые подаются в БРАС для формирования информации о качестве разбега и предупреждения об опасности и передачи в СОИ и индикации включения тревожной сигнализации; система СПОБЗ выполнена с возможностью определять на основе измерения параметров сигналов бортовых датчиков, указывающих географическое местоположение летательного аппарата (ЛА), высоту, показываемую радиовысотомером Н, геодезическую высоту Н спутниковой навигационной системы (СНС), данных измерителя вертикальной скорости V ЛА, приемника сигналов ε отклонения от радиотехнической глиссады посадки, внутренней базы данных о местности и препятствиях в аэропортах - минимальное значение допустимой высоты над землей в экстремальных условиях атмосферы для передачи в БРАС с целью формирования информации принятия решения об условиях близости поверхности земли, после чего информационные сигналы поступают в СОИ для индикации включения тревожной сигнализации; система СПВОЗ выполнена с возможностью измерения параметров бортовых датчиков углов атаки α, углов крена γ, нормальной перегрузки n, угловой скорости тангажа ω,определения предельно допустимых разностей между опасными и пороговыми значениями по параметрам сигналов угла атаки α и его производной , сигналов вертикальной перегрузки n и ее производной и допустимых значений сигналов угла атаки α, сигналов допустимых значений продольной перегрузки n , зависящих от числа Μ и веса ЛА, фильтрации сигналов угловой скорости ω, передаваемых в БРАС для формирования информации предупреждения о выходе на опасные углы атаки и перегрузки, после чего сигналы подаются в СОИ для индикации включения тревожной сигнализации; система СКЗП выполнена с возможностью на основе измерения параметров сигналов бортовых датчиков отклонения в пространстве траектории ЛА, выдаваемых приемником курсоглиссадных радиомаяков, бортовой спутниковой навигационной системы (СНС), датчиком радиовысотомера Н, датчиком барометрической высоты, датчиком воздушной скорости V, положения шасси и закрылков в БРАС формировать сигналы принятия решений об условиях выхода за пределы допустимых отклонений, передаваемые в СОИ для индикации включения тревожной сигнализации, в директорные приборы и блок включения систем автоматического управления (САУ); система СППСВ выполнена с возможностью на основе измерения параметров бортовых датчиков приборной скорости V и ее производной, вертикальной скорости V приращения углов атаки Δα определять превышение измеренных и заданных значений при попадании ЛА в условия сдвига ветра, формировать в БРАС сигнал принятия решения о критичности условий попадания в сдвиг ветра, передавая их в СОИ для индикации включения тревожной сигнализации; входы перечисленных систем вместе с первым входом БРАС соединены с выходами ССБИ, выходы указанных систем соединены со вторыми входами БРАС, а выход его подключен к СОИ, установленной перед летчиком экипажа, взаимодействующего с СШУ, кроме того, структура БРАС построена в виде двухуровневой системы, в которой на первом уровне распознавания реализуют контроль состояния ЛА и режимов работы его подсистем, а на втором уровне распознавания проводят контроль отказов, контроль за выполнением режимов полета, контроль критических значений параметров полета.

Способ оценки чистоты воздуха гермокабин летательных аппаратов, поступающего от компрессоров газотурбинных двигателей, на содержание продуктов разложения смазочных масел
Система управления летным экспериментом
Поисковая экспертная система
Способ определения и сигнализации о приближении несущего винта к зоне режимов "вихревого кольца" на предпосадочных маневрах одновинтового вертолета
Способ оценки горизонтальных составляющих индуктивных скоростей на малых скоростях полёта одновинтового вертолёта
Способ определения механических напряжений в деталях, изготовленных на металлорежущих станках
Способ определения аэродинамических коэффициентов c и с на основе определения суммарной тяги двигательной установки по результатам летных испытаний летательного аппарата
Катушка высокодобротного импульсного соленоида
Экспертная система контроля работы бортового оборудования летательных аппаратов
Полиэргатический тренажерный комплекс предупреждения столкновений летательных аппаратов
Способ оценки чистоты воздуха гермокабин летательных аппаратов, поступающего от компрессоров газотурбинных двигателей, на содержание продуктов разложения смазочных масел
Система управления летным экспериментом
Поисковая экспертная система
Способ определения и сигнализации о приближении несущего винта к зоне режимов "вихревого кольца" на предпосадочных маневрах одновинтового вертолета
Способ оценки горизонтальных составляющих индуктивных скоростей на малых скоростях полёта одновинтового вертолёта
Способ определения аэродинамических коэффициентов c и с на основе определения суммарной тяги двигательной установки по результатам летных испытаний летательного аппарата
Катушка высокодобротного импульсного соленоида
Экспертная система контроля работы бортового оборудования летательных аппаратов
Полиэргатический тренажерный комплекс предупреждения столкновений летательных аппаратов
Способ формирования модели прогноза образования конденсационных следов (кс) самолетов гражданской авиации (га) с конкретным типом газотурбинного двигателя и конденсационных перистых облаков (кпо) с использованием количественных показателей образования кс и кпо для экологической оптимизации полетов самолетов га на конкретных трассах в различных регионах земли и возможности снижения влияния эмиссии двигателей на парниковый эффект

