Результат интеллектуальной деятельности: СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ
Вид РИД
Изобретение
Изобретение относится к области машиностроения, может быть использовано в ручных гидравлических системах управления подвижными наземными, авиационными и морскими объектами и предназначено для формирования посредством гидрораспределителей команд по четырем каналам управления для одноковшовых экскаваторов с гидроприводом и шести команд для харвестеров и манипуляторов.
Известно ручное управление манипулятором-триподом (патент RU №2501648 МПК B25J 13/02, опубл. 20.12.2013), позволяющее повысить удобство и точность ручного управления манипулятором-триподом за счет производства нескольких одновременно действующих воздействий на объект управления.
Недостатками данного технического решения являются невысокая достигаемая точность управления, связанная с физиологически ограниченной возможностью перемещения манипуляционной рукоятки, а также ограничение двумя степенями свободы устройства ручного управления, что существенно ограничивает управленческие возможности оператора.
Известен способ управления экскаватором HITACHI Zaxis (Руководство для оператора Zaxis 240LC-3330LC-3. Экскаваторы среднего класса. ZX225USRLC-3 [электронный ресурс] // Hitachi Construction Machinery Eurasia. Режим доступа: http://www.hitachicm.ru/Floating-pages/Zagruzka-broshyur/(group)/144 (дата обращения 25.02.2016)) многорычаговой системой.
Недостатком способа является необходимость прохождения оператором устройства специальной подготовки, связанная со сложностью управления и необходимостью запоминания порядка действий для осуществления операций исполнительным органом экскаватора.
Наиболее близким является интуитивно копирующий способ управления манипулятором KRAFT GRIPS (Grips [электронный ресурс] // Робототехника. Наука и технология. Режим доступа: http://www.krafttelerobotics.ru/produktsiya.html (дата обращения 25.02.2016)), с 7 степенями свободы, который может быть установлен на различные транспортные средства, при котором в конструкции копирующего манипулятора используется четырехзвенный механизм и интуитивно понятное копирующее управление манипулятором с точной силовой обратной связью, включающее контактную подачу последовательных элементарных команд оператором на звенья исполнительного механизма посредством перемещения закрепленной на консоли манипуляционной рукоятки.
Недостатками способа, реализованного в управлении манипулятора, являются значительные затраты времени на регламентные работы по обслуживанию электрооборудования. Органы управления манипуляторов предполагают вывешенное в пространстве состояние руки оператора с незначительным сопротивлением со стороны рукоятки управления, что в течение короткого времени, в условиях физической, вибрационной и психологической нагрузки, вызывает утомление мышц руки, снижение точности управления и вынужденные перерывы в работе.
Задачей изобретения является разработка интуитивно копирующего способа управления многозвенной техникой, оснащенной гидравлическим приводом.
Техническим результатом является упрощение способа и повышение точности управления исполнительным органом одноковшовых экскаваторов, харвестеров, манипуляторов и повышение производительности труда.
Технический результат достигается в способе интуитивно копирующего управления одноковшовым экскаватором, включающем контактную подачу последовательных элементарных команд оператором на звенья исполнительных механизмов перемещением манипуляционной рукоятки, установленной на консоли посредством рычажного механизма, при этом между рычажным механизмом и манипуляционной рукояткой установлен ложемент с вертикальной и горизонтальной податливостью, снабженный регулируемым пружинным весовым компенсатором, и шарнирно связанный с манипуляционной рукояткой, а управление звеньями исполнительных механизмов осуществляется через гидрораспределители движениями биокинематической цепи руки оператора последовательным или одновременным воздействием на манипуляционную рукоятку и ложемент.
Способ интуитивно копирующего управления одноковшовым экскаватором характеризуется тем, что манипуляционная рукоятка снабжена элементами управления харвестерной головкой.
Для осуществления способа интуитивно копирующего управления одноковшовым экскаватором оператор располагает предплечье руки на ложементе, фиксирует предплечье откидными прихватами и обхватывает кистью манипуляционную рукоятку (регулировка кресла по высоте должна обеспечивать свободное, расслабленное состояние руки на ложементе).
При этом, регулируемый пружинный весовой компенсатор приводится в положение, при котором гидрораспределитель, связанный с вертикальной податливостью ложемента, занимает нейтральную позицию, после чего осуществляется запуск двигателя и гидропривода экскаватора.
Действие регулируемого пружинного весового компенсатора позволяет снизить утомляемость мышц руки оператора от ее веса, исключить возможность возникновения тремора от напряжения.
В процессе интуитивно копирующего управления траектория перемещения оператором манипуляционной рукоятки с ложементом относительно консоли, содержащей блоки дистанционного управления гидрораспределителями, будет копироваться траекторией движения стрелы и рукояти экскаватора, а поворот манипуляционной рукоятки относительно кистевого сустава будет копироваться разворотом ковша. Таким образом, предплечье ассоциируется у оператора со стрелой и рукоятью исполнительного органа, а ладонь - с ковшом.
Сведение всех органов управления звеньями исполнительных механизмов, на один общий узел, в виде подпружиненного ложемента и манипуляционной рукоятки с вертикальной и горизонтальной податливостью, связанных с консолью, содержащей блоки дистанционного управления гидрораспределителями, посредством рычажных механизмов, позволяет осуществить интуитивно копирующее управление одноковшовым экскаватором, давая возможность оператору естественными движениями руки, выполнять последовательные или одновременные движения биокинематической цепи руки и управлять движением ковша экскаватора так, как если бы он был ее продолжением. При этом оператору не требуются специальные умения и навыки.
Интуитивно копирующий способ управления исключает возможность несогласованных и ошибочных действий оператора при возникновении нештатных ситуаций, способствует снижению психологического напряжения и усталости, обеспечивает повышение точности управления экскаватором и производительности труда.
Следствием этого является расширение профессионально пригодного к управлению одноковшовыми экскаваторами и харвестерами контингента и сокращение сроков его подготовки.
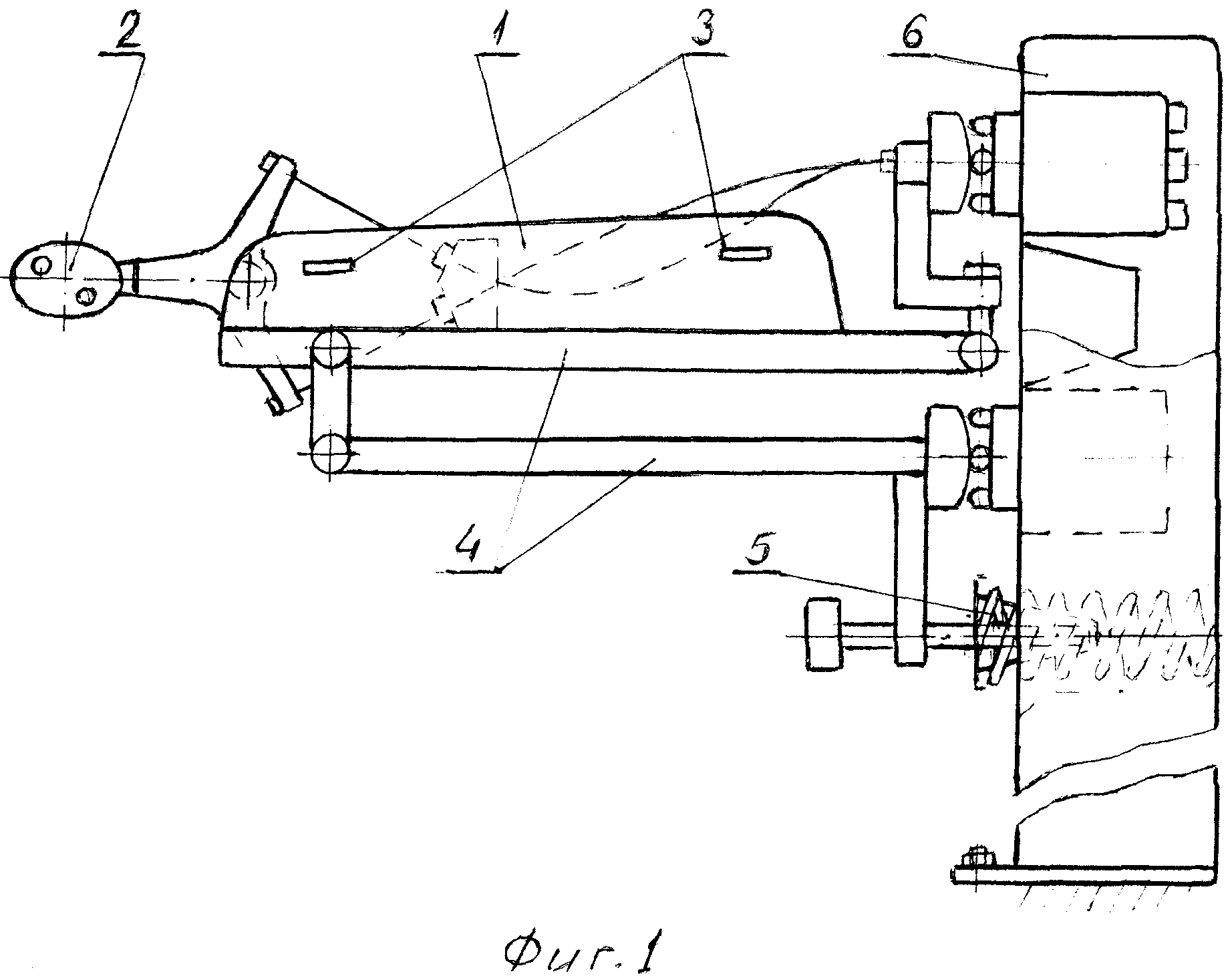
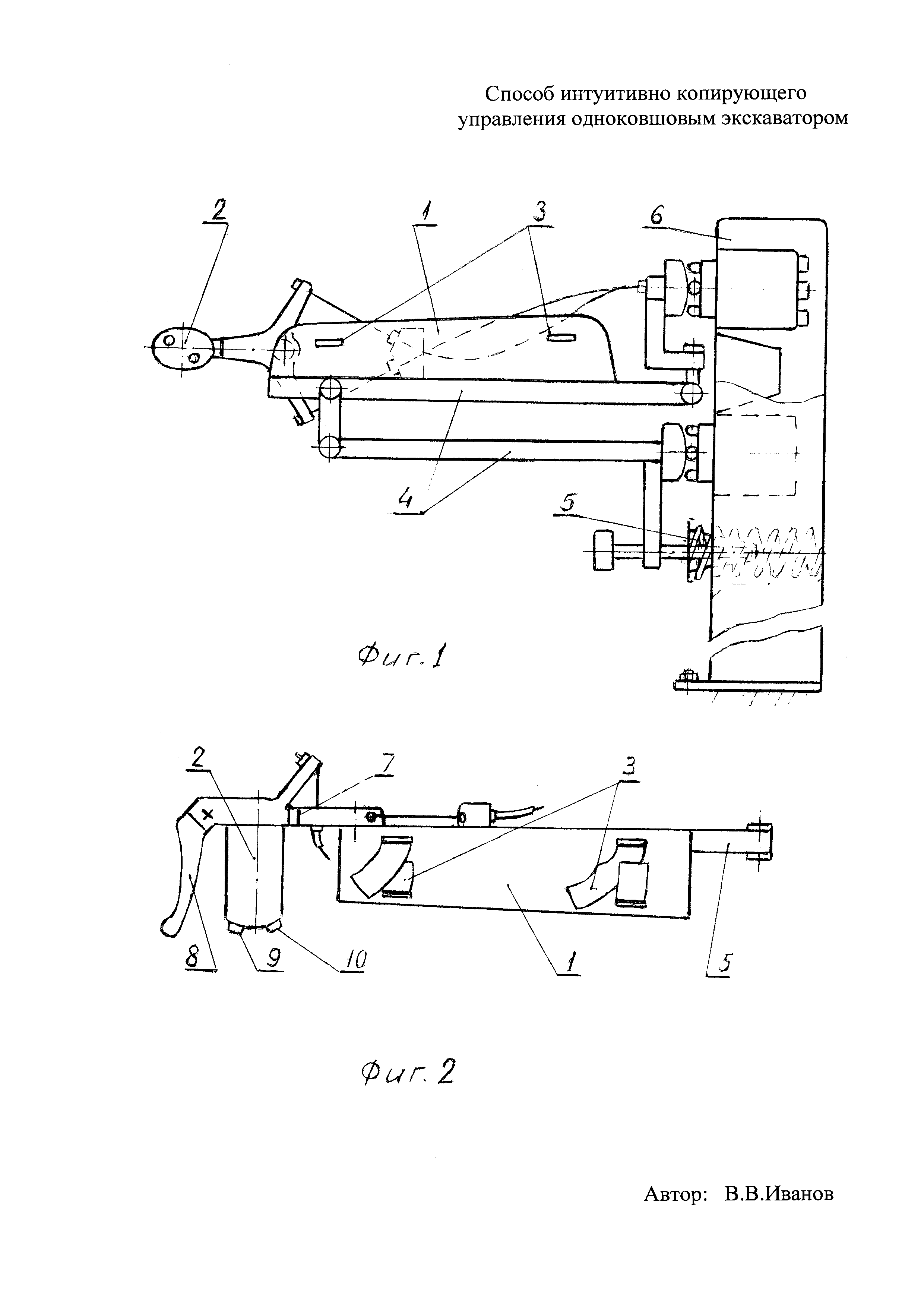
На фиг. 1 показан общий вид органа управления одноковшовым экскаватором, на фиг. 2 показан орган управления харвестером, вид в плане.
Орган управления одноковшовым экскаватором (по фигуре 1) состоит из ложемента 1 с манипуляционной рукояткой 2 и обхватами 3, рычажного механизма 4 с регулировочным весовым компенсатором 5 и блоками дистанционного управления золотниками гидроприводов рабочих органов экскаватора, объединенных в консоли 6.
Одним из эффективных подходов к экономичной заготовке леса является использование экскаватора с установленной на него харвестерной головкой. Предлагаемый интуитивно копирующий способ управления подходит и эффективен при управлении харвестерной головкой. Для этого манипуляционная рукоятка снабжается дополнительными элементами управления харвестерной головкой, а именно: шарниром 7 (фиг. 2), обеспечивающим поворот манипуляционной рукоятки относительно продольной оси ложемента с тросовым приводом к блоку дистанционного управления гидрораспределителями, обеспечивающими, соответственно, крен захвата харвестерной головки относительно рукояти, ручным рычагом мотоциклетного типа 8 с тросовым приводом, осуществляющим срабатывание захвата и его развод, а также кнопочным включателем 9, на торце манипуляционной рукоятки 2, предназначенным для включения режущего инструмента, и кнопочным включателем 10 запуска сучкореза и механизма протаскивания.
Пример 1
Интуитивно копирующий способ управления одноковшовым экскаватором осуществляется следующим образом.
Оператор выполняет посадку в кресло, укладывает предплечье правой руки на ложемент 1 и обхватывает кистью руки манипуляционную рукоятку 2. Посредством откидных обхватов 3 фиксирует предплечье руки относительно ложемента 1. Используя регулируемый пружинный весовой компенсатор 4 выставляет рычаги 5 подъема и поворота стрелы в положение, соответствующее нейтральному положению блоков дистанционного управления золотниками гидрораспределителей, агрегатированных консолью 6. При этом посадка машиниста в кресле должна быть удобной и свободной, а предплечье руки без напряжения располагаться на ложементе 1, без усилия обхватывая манипуляционную рукоятку 2. После этих подготовительных операций следует запуск двигателя с гидроприводом.
При подъеме оператором запястья правой руки вверх относительно локтя, обращенная к манипуляционной рукоятке часть ложемента 1 также поднимается, вызывая, посредством рычажного механизма, срабатывание соответствующего блока дистанционного управления золотником гидропривода и осуществляя подъем стрелы экскаватора. При опускании запястья руки относительно локтя происходит опускание стрелы.
При повороте манипуляционной рукоятки 2 с ложементом 1 в горизонтальной плоскости направо обеспечивается поворот платформы экскаватора со стрелой относительно шасси по часовой стрелке. Поворот манипуляционной рукоятки с ложементом в другую сторону приведет к соответствующему повороту и платформы экскаватора.
Перемещение манипуляционной рукоятки 2 с ложементом 1 вдоль его продольной оси от консоли обеспечивает перемещение рукояти экскаватора вперед. Движение ложемента 1 в обратном направлении вызывает и соответствующее движение рукояти.
Поворот запястьем манипуляционной рукоятки 2 в вертикальной плоскости относительно ложемента 1 в направлении от себя вызовет соответственный поворот ковша, а поворот ее в обратном направлении и к соответствующему обратному повороту ковша.
Кинематика рычажного механизма обеспечивает возможность не только последовательного, но и одновременного выполнения рабочих движений исполнительным органом экскаватора.
Пример 2
Интуитивно копирующий способ управления харвестером осуществляется следующим образом.
Подготовительные операции, включая запуск двигателя, аналогичны подготовке экскаватора.
Манипулируя ложементом 1 с манипуляционной рукояткой 2, оператор подводит захват харвестерной головки до соприкосновения со стволом дерева, поджав пальцами рычаг 8 к манипуляционной рукоятке 2, оператор осуществляет захват и удержание ствола. Удерживая рычаг 8, нажатием большим пальцем руки кнопочного включателя 9 производится запуск режущего инструмента для выполнения среза. При этом оператор должен обеспечить незначительный натяг ствола вверх во избежание заклинивания режущего инструмента при завершении реза. Отпускание кнопочного включателя 9 приводит к отключению режущего инструмента.
Поворот запястьем оператора манипуляционной рукоятки 2 в вертикальной плоскости относительно ложемента 1 в направлении от себя вызовет крен срезанного дерева от экскаватора, а при повороте к себе крен его к экскаватору.
Поворот запястьем оператора манипуляционной рукоятки 2 относительно продольной оси ложемента 1 по часовой стрелке или против нее приведет к крену в соответственном направлении срезанного дерева.
По завершению валки дерева оператор кнопкой 10 включает сучкорез с механизмом протаскивания дерева и его распиловкой на части.
Манипулируя предплечьем и кистью руки, оператор перемещает срезанный ствол в зону складирования и, отпуская рычаг 8, разжимает захват харвестерной головки, освобождая срезанный ствол.
Таким образом, способ интуитивно копирующего управления одноковшовым экскаватором, при котором управление звеньями исполнительных механизмов осуществляется через гидрораспределители движениями биокинематической цепи руки оператора последовательным или одновременным воздействием на манипуляционную рукоятку и подпружиненный ложемент, соединенных посредством рычажных механизмов с консолью, содержащей блоки дистанционного управления гидрораспределителями, обеспечивает повышение точности управления исполнительными механизмами, и производительности труда на одноковшовых экскаваторах, харвестерах и манипуляторах, исключает длительную практику, основанную на мнемонике, при подготовке операторов.
Теплозащитный материал
Способ получения меланина из лузги подсолнечника
N-(адамантан-2-ил)- и n-[(адамантан-1-ил)метил]- производные амида 2-(4-аллил-2-метоксифенокси)уксусной кислоты, являющиеся потенциальными синтетическими адаптогенами экстренного действия
Способ получения термопластичного эластомера на основе натурального каучука и поливинилхлорида
Способ получения производных n-алкил- и n,n-диалкилизоцитозина
Эластомерная композиция на основе натурального каучука
Способ производства желированных мясных продуктов
Посыпка для панировки пищевых продуктов
Способ производства йогурта с зеленым чаем матча
Способ определения водонасыщения асфальтобетона
Генератор для получения наночастиц в импульсно-периодическом газовом разряде
Плоский индуктор для магнитно-импульсного прессования изделий из наноразмерных порошков
Способ изготовления объемных микроразмерных структур из наночастиц и устройство для его осуществления
Способ определения значений параметров разрядного контура с нагруженным на газоразрядный межэлектродный промежуток емкостным накопителем энергии, обеспечивающих максимальную энергоэффективность получения наночастиц в импульсном газовом разряде
Способ интуитивного управления летательным аппаратом
Устройство для получения наночастиц при аддитивном изготовлении объемных микроразмерных структур
Способ аддитивного изготовления объемных микроразмерных структур из наночастиц

