Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано в гидролокации, в частности для повышения достоверности измерения дистанции.
Известен способ обнаружения эхосигнала и измерения дистанции, изложенный в книге B.C. Бурдика "Анализ гидроакустических систем". Судостроение, 1988 г., стр. 347, который содержит многоканальную по частоте фильтрацию, детектирование, выделение огибающей эхосигнала и сравнение ее амплитуды с порогом. По каналу с максимальной амплитудой сигнала по частоте определяется смещение спектра, которое пропорционально радиальной скорости цели, а по моменту превышения выбранного порога определяется задержка эхосигнала и дистанция до объекта обнаружения.
При использовании цифровой техники в качестве спектрального анализа применяют процедуры быстрого преобразования Фурье (БПФ), которые обеспечивают выделение и измерение энергетического спектра шумового электрического процесса ("Применение цифровой обработки сигналов", изд. Мир, М., 1990 г., стр. 296). Перечисленные способы имеют точность измерения дистанции, определяемую длительностью зондирующего сигнала
Известен способ обнаружения эхосигнала и измерения дистанции, рассмотренный в книге Л. Рабинера, Б. Гоулда «Теория и применение цифровой обработки сигналов», Мир, Москва, 1978 г.
Способ содержит следующие операции: излучение зондирующего сигнала длительностью Т на известной частоте; прием эхосигнала в смеси с шумовой помехой гидроакустической антенной; дискретизацию электрического сигнала на выходе гидроакустической антенны; набор приемным устройством дискретизированных отсчетов длительностью Т; определение энергетического спектра с помощью процедуры быстрого преобразования Фурье (БПФ); многократное повторение процедуры набора дискретизированных отсчетов длительностью T через равные промежутки времени и определение энергетического спектра каждого набора; выбор набора с максимальной энергией сигнала; принятие решения об обнаружении и измерение дистанции по набору с максимальной энергией сигнала.
Недостатком способа является низкая точность измерения дистанции, определяемая временным сдвигом набора временной реализации, и смещение оценки измерения дистанции.
Наиболее близким аналогом, который может быть принят за прототип, является способ измерения дистанции, основанный на приеме эхосигнала гидролокатора, изложенный, например, в книге Евтютов Е.С. и Митько В.Б. "Примеры инженерных расчетов в гидроакустике", Судостроение, 1981 г., с. 77. Способ содержит излучение зондирующего сигнала, спектральный анализ принятых эхосигналов, детектирование спектральных составляющих, интегрирование огибающей, обнаружение сигнала при сравнении с порогом. В момент превышения выбранного порога определяется время задержки эхосигнала, и по нему высчитывается дистанция до объекта, а по смещению центральной частоты принятого эхосигнала относительно центральной частоты излученного сигнала определяется радиальная скорость объекта.
Недостатком рассматриваемого технического решения является то, что при распространении зондирующего сигнала и распространении эхосигнала на большие расстояния возникает ошибка определения текущей оценки дистанции, которая определяется совместным перемещением гидролокатора и объекта за время распространения зондирующего и эхосигнала.
После излучения зондирующего сигнала гидролокатор продолжает движение в выбранном направлении. Например, при скорости движения гидролокатора 6 узлов, что составляет 3 м/с, и времени распространения до объекта и обратно 20 секунд, дистанция до объекта, измеренная на момент приема эхосигнала, уменьшится на 60 метров. Аналогично происходит и при движении объекта после отражения эхосигнала. Объект продолжает двигаться в прежнем направлении и за время распространения эхосигнала от объекта до гидролокатора, равного примерно 10 секунд, и при скорости 3 м/сек, пройдет расстояние, равное 30 метрам. Таким образом, измеренная дистанция будет отличаться от реальной дистанции на момент прихода эхосигнала на 90 метров. Эта ошибка зависит от дистанции и скорости движения гидролокатора и скорости перемещения объекта и изменяется в зависимости от конкретной ситуации.
Задачей изобретения является повышение достоверности определения дистанции, измеренной движущимся гидролокатором.
Техническим результатом от использования изобретения является повышение точности измерения дистанции путем устранения ошибки, связанной с совместным перемещением гидролокатора и объекта за время распространения сигнала и эхосигнала и определение текущей дистанции с учетом перемещения гидролокатора и объекта.
Технический результат достигается тем, что в способ определения дистанции гидролокатором, содержащий излучение зондирующего сигнала в момент времени Тиз, прием эхосигнала, спектральный анализ эхосигналов, определения дистанции Добн=0,5(Тпр-Тиз)С в момент превышения порога амплитудой эхосигнала Тпр, где С - скорость звука, определение радиальной скорости Vр.об по смещению спектрального эхосигнала относительно частоты излученного сигнала, введены новые признаки, а именно: измеряют собственную скорость носителя гидролокатора Vсоб, измеряют курсовой угол объекта Q0, определяют радиальную скорость сближения с объектом Vр.соб=VсобcosQ0, измеряют дистанцию перемещения гидролокатора к объекту за время распространения эхосигнала Дгл=(Тпр-Тиз)VсобcosQ0, определяют дистанцию перемещение объекта за время распространения эхосигнала от объекта до гидролокатора Доб=0,5(Тпр-Тиз)Vр.об, а текущую дистанцию до объекта Дтек определяют как Дтек=Добн-Дгл.±Доб=(Тпр-Тиз)(0,5С-VсобcosQ0±0,5Vр.об), где плюс при приближении объекта, а минус при удалении.
Поясним достижение указанного результата.
Предположим, что работа производится неподвижным гидролокатором по неподвижному объекту. Излучаем сигнал в момент времени Тиз и принимаем эхосигнал в момент времени Тпр. Сигнал до объекта и обратно распространялся за время (Тпр-Тиз) и дистанция до объекта будет равна Добн=0,5С(Тпр-Тиз). Теперь рассмотрим излучение с подвижного гидролокатора, который передвигается со скоростью Vсоб. Тогда после излучения зондирующего сигнала гидролокатор движется со скоростью Vсоб в направлении объекта и за время распространения сигнала до объекта и обратно пройдет расстояние, равное Дгл=Vсоб(Tпр-Тиз). Тогда текущая дистанция до объекта на момент приема эхосигнала будет равна Дтек=0,5С(Тпр-Тиз)-Vсоб(Тпр-Тиз). Это соотношение справедливо, если гидролокатор движется точно на обнаруженный объект. В том случае если направление движения гидролокатора отличается от пространственного положения объекта, то следует определить радиальную составляющую, которая определяет скорость сближения гидролокатора и объекта. Поэтому следует измерить курсовой угол объекта Q0, и тогда Vр.соб=VсобcosQ0. Теперь предположим, что и объект движется со скоростью Vоб, тогда за время распространения эхосигнала от объекта к приемнику будет пройдено определенное расстояние, которое увеличит ошибку измеренной дистанции. Ориентировочно это время может быть принято равным Тоб=0,5(Тпр-Тиз). Это не совсем точная величина, она отличается от точной величины, которая определяется сложной зависимостью на величину отношения Vоб/Cзв. Поскольку скорость звука составляет 1500 м/с, а скорость объекта порядка 10 м/с, то этой составляющей можно пренебречь. Тогда ошибка измерения дистанции за счет перемещение объекта на момент приема эхосигнала составит Дош.об=Vоб0,5(Tпр-Тиз). Конечное выражение для определения текущей дистанции до объекта: Дтек=Доб-Дсоб±Дош.об, где плюс соответствует приближению объекта, а минус удалению. Или окончательно после подстановки всех составляющих Дтек=(Тпр-Тиз)(0,5С-VсобcosQ0±0,5Vр.ц).
Все процедуры, которые используются для получения оценки текущей дистанции Дтек известны и используются в современной гидроакустической технике.
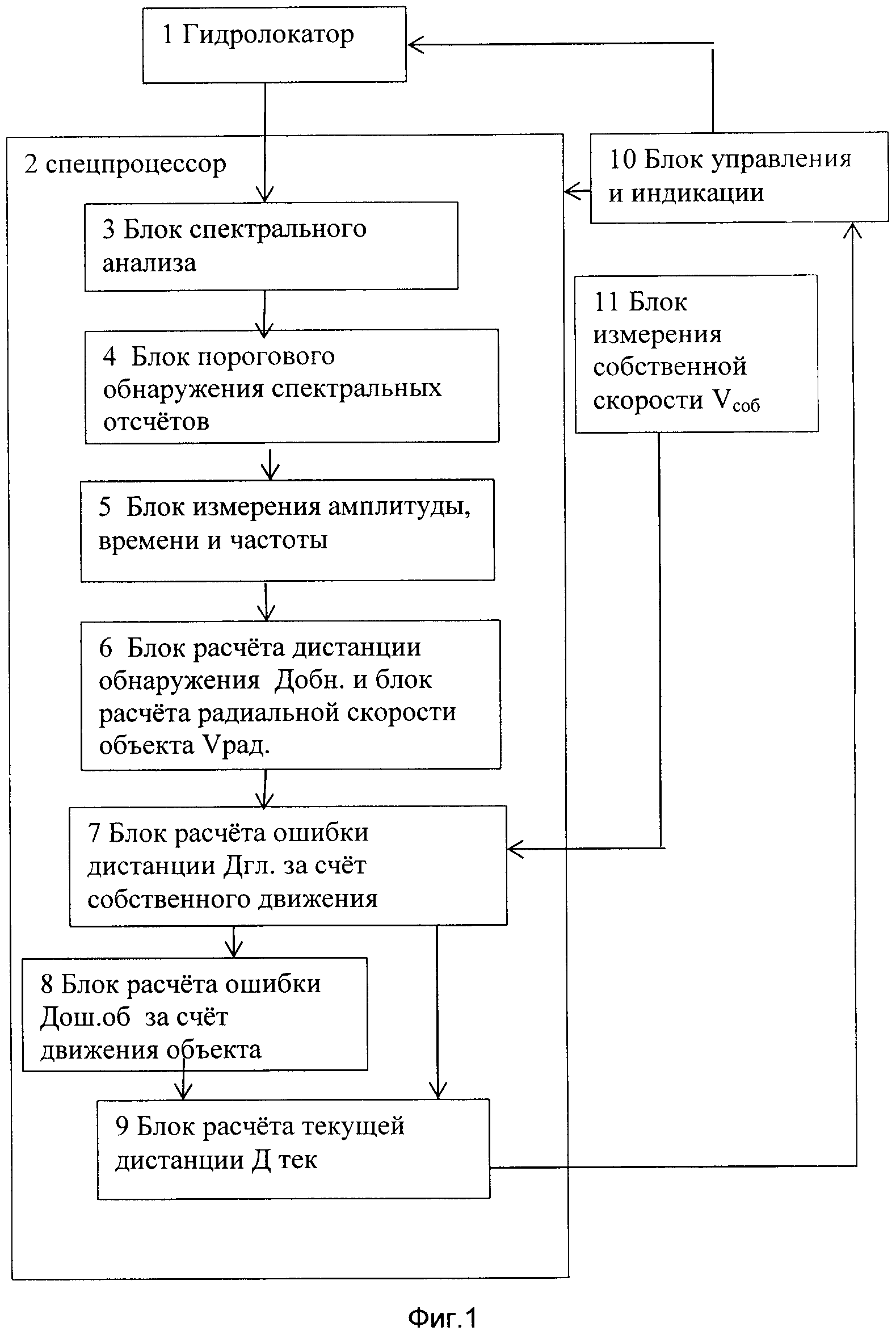
Сущность изобретения поясняется фиг. 1, на которой приведена блок-схема устройства, реализующая предлагаемый способ измерения дистанции.
На фиг. 1 представлен гидролокатор 1, через спецпроцессор 2, в состав которого входят последовательно соединенные блок 3 спектрального анализа, блок 4 порогового обнаружения, блок 5 измерения времени и курсового угла, блок 6 расчета дистанции обнаружения Добн и расчета радиальной скорости объекта, блок 7 расчета ошибки дистанции за счет собственного движения, блок 8 расчета ошибки дистанции Дош.об за счет движения объекта, блок 9 расчета текущей дистанции Дтек и блок 10 управления и индикации. На второй выход блока 7 поступает сигнал от блока 11 измерения собственной скорости. Второй выход блока 7 соединен со вторым входом блока 9.
С помощью предлагаемого устройства предложенный способ измерения дистанции осуществляется следующим образом. По сигналу управления с блока 11 гидролокатор 1 излучает зондирующий сигнал, и одновременно значение (момент) времени излучения передается в спецпроцессор 2. Отраженный эхосигнал принимается гидролокатором 1 и поступает в блок 3 спектрального анализа, где определяется спектр принятого сигнала. Спектры передаются в блок 4 порогового обнаружения спектральных отсчетов, где производится определение дискретных составляющих спектра, которые превысили помеховый порог. В блоке 5 происходит измерение амплитуд выделенных дискретных составляющих и их номеров отсчета, что соответствует частоте дискретной составляющей, которая определяет радиальную скорость, и определение курсового угла объекта Q0. По этим данным в блоке 6 производится определение дистанции до объекта Добн и радиальной скорости объекта Vр.об. В блоке 7 рассчитывается дистанция ошибки Дгл, которая вызвана собственным движением гидролокатора, для чего из блока 11 поступает оценка собственной скорости Vсоб. В блоке 8 дополнительно рассчитывается ошибка измерения дистанции Дош.об за счет движения объекта после отражения эхосигнала. Окончательное определение текущей дистанции Дтек до объекта происходит в блоке 9. Выработанная оценка передается в блок 10 управления и индикации.
Гидролокатор является известным устройством, которое достаточно подробно используется в гидроакустической практике и описано в технической литературе (А.С. Колчеданцев «Гидроакустические станции», Судостроение, 1982 г.).
Для качественного решения задач обработки гидроакустической информации в современных корабельных гидроакустических средствах (станциях) используются спецпроцессоры на основе ЦВС, обладающие высокой производительностью, функциональной надежностью и малыми габаритами. С использованием специального алгоритмического и программного обеспечения спецпроцессорами могут решаться все задачи формирования и обработки принимаемых гидроакустических сигналов, в том числе формирования статического веера характеристик направленности, определение энергетического спектра, обнаружения эхосигналов, измерения их параметров (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», СПб., изд. «Наука», 2004 г. Стр. 281).
Таким образом, использование предлагаемой процедуры измерений и вычислений обеспечивает более надежную достоверность определения дистанции, оценка которой учитывает изменение дистанции за счет собственного движения и движения объекта при распространении зондирующего сигнала и эхосигнала.
Способ определения дистанции гидролокатором, содержащий излучение зондирующего сигнала в момент времени Т, прием эхосигнала, спектральный анализ эхосигналов, определения дистанции Д==(Т-Т)0,5С в момент превышения порога амплитудой эхосигнала Т, определения скорости звука С, определение радиальной скорости V по смещению спектра эхосигнала относительно частоты излученного сигнала, отличающийся тем, что измеряют собственную скорость V гидролокатора, измеряют курсовой угол объекта Q, определяют радиальную скорость сближения с объектом V=VcosQ, измеряют дистанцию перемещения гидролокатора к объекту за время распространения Д=(Т-Т)VcosQ, определяют дистанцию перемещения объекта за время распространения эхосигнала от объекта до гидролокатора Д=0,5(Т-Т)V, а текущую дистанцию до объекта определяют как Д=Д-Д-Д=(Т-Т)(0,5С-VcosQ±0,5V), где плюс при приближении объекта, а минус при удалении.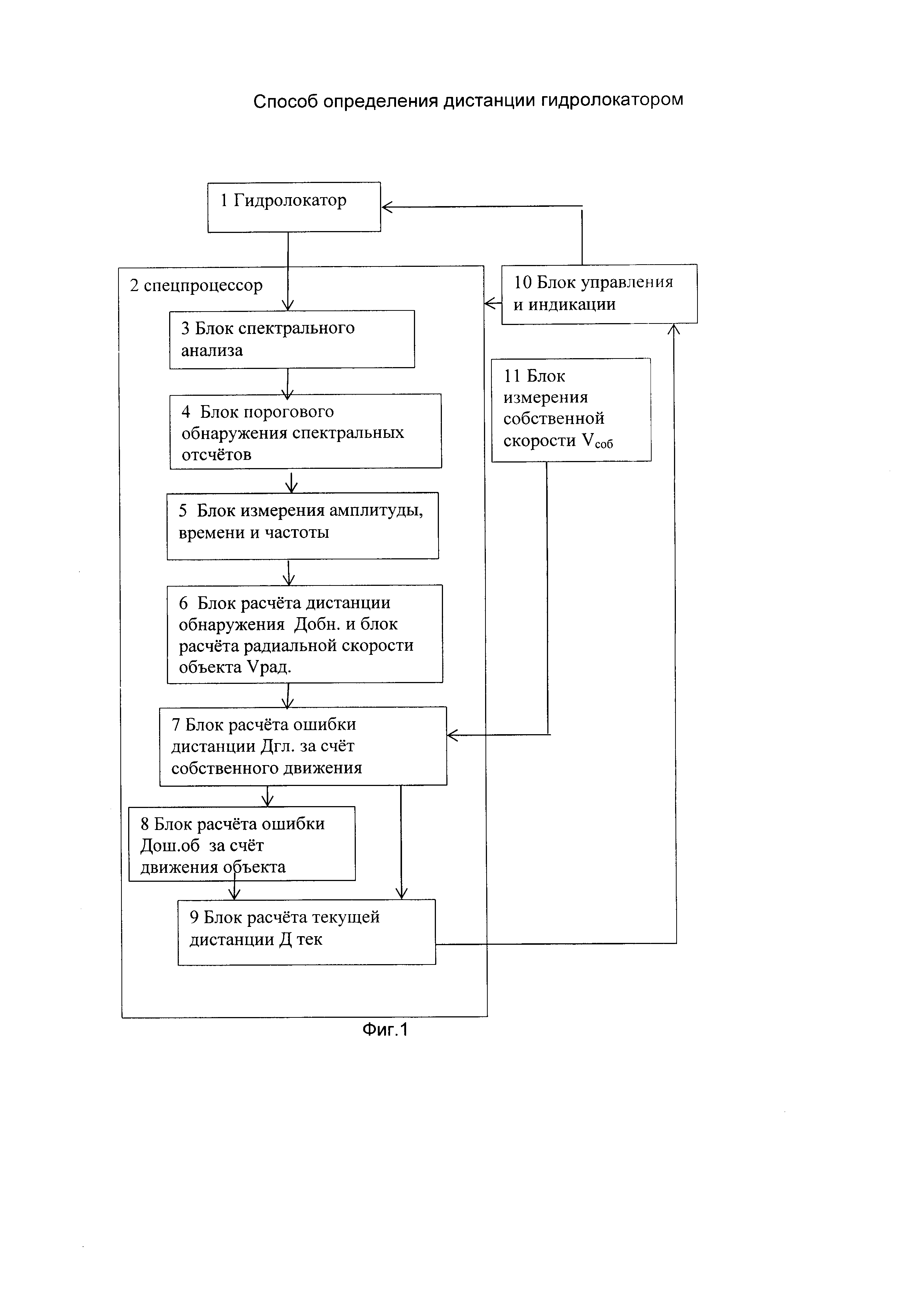
Способ автоматической классификации
Способ обработки гидроакустического сигнала шумоизлучения объекта
Способ измерения толщины льда
Способ оценки дистанции до шумящего в море объекта
Способ адаптивной обработки сигнала шумоизлучения
Гидроакустический способ определения пространственных характеристик объекта
Способ классификации шумящих объектов
Способ измерения дистанции гидролокатором
Способ обработки сигнала шумоизлучения объекта
Система и способ определения местоположения водолаза
Способ автоматической классификации
Способ обработки гидроакустического сигнала шумоизлучения объекта
Способ измерения толщины льда
Способ оценки дистанции до шумящего в море объекта
Способ адаптивной обработки сигнала шумоизлучения
Гидроакустический способ определения пространственных характеристик объекта
Способ классификации шумящих объектов
Способ измерения дистанции гидролокатором
Способ обработки сигнала шумоизлучения объекта
Система и способ определения местоположения водолаза

