Результат интеллектуальной деятельности: АВТОМАТИЗИРОВАННАЯ МАШИНА ДЛЯ ИЗМЕЛЬЧЕНИЯ, А ТАКЖЕ СПОСОБ ВЫГРУЗКИ ИЗМЕЛЬЧЕННОГО МАТЕРИАЛА
Вид РИД
Изобретение
Настоящее изобретение относится к автоматизированной машине для измельчения в соответствии с ограничительной частью пункта 1 формулы изобретения, а также к способу выгрузки измельченного материала в соответствии с ограничительной частью пункта 10 формулы изобретения.
Известно, что автоматизированная машина для измельчения выгружает измельченный материал на не меньше чем одно транспортное средство с загрузочной поверхностью.
Машина для измельчения содержит контроллер для осуществления перемещения и измельчения, а также рабочий барабан для измельчения, например, дорожного покрытия. Транспортировочное конвейерное устройство, например, транспортировочное конвейерное устройство, содержащее по меньшей мере один транспортировочный конвейер, расположено впереди или позади упомянутого рабочего барабана, если смотреть в направлении перемещения. Транспортировочное конвейерное устройство содержит разгрузочный конец, в котором измельченный материал выгружают на загрузочную поверхность упомянутого по меньшей мере одного транспортного средства через участок полета в виде параболической траектории, которая обусловлена скоростью подачи. Последний или единственный транспортировочный конвейер транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, выполнен с возможностью поворота в сторону, относительно продольной оси машины для измельчения, на заданный угол поворота влево или вправо и с возможностью регулирования по высоте на заданный угол возвышения.
На практике возникают проблемы при взаимодействии машины для измельчения с транспортным средством.
Например, при использовании машины для измельчения с передней загрузкой измельченный материал выгружают вперед на транспортное средство, движущееся впереди. Оператор машины для измельчения должен сигнализировать водителю транспортного средства, когда транспортное средство должно продолжать перемещение вперед. Это приводит к проблемам, поскольку оператору в принципе нужно концентрироваться на процессе измельчения и одновременно нужно предотвращать столкновение с транспортным средством, движущимся впереди. Информация обычно передается посредством звука гудка, чтобы, как только водитель транспортного средства услышит звук гудка, транспортное средство переместилось вперед на некоторое расстояние. Проблема возникает в том случае, если водитель транспортного средства не слышит сигнала гудка или если другое транспортное средство, движущееся за ним, издает сигнал гудка, так что водитель транспортного средства ошибочно думает, что нужно перемещать его транспортное средство вперед. Если водитель транспортного средства не слышит сигнала гудка, это может вызвать столкновение поворотного транспортировочного конвейера транспортировочного конвейерного устройства с транспортным средством, или оператор машины для измельчения вынужден останавливать непрерывный процесс измельчения.
Дополнительная проблема заключается в том, что оператор машины для измельчения также должен осуществлять загрузку загрузочной поверхности посредством регулирования угла поворота, угла возвышения и скорости подачи последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, и тем самым отвлекаться от реальной задачи осуществления операции измельчения. Например, при изменении направления рулевого управления машиной для измельчения может потребоваться коррекция угла поворота транспортировочного конвейера.
В случае машины для измельчения с задней загрузкой также возникают проблемы взаимодействия машины для измельчения с транспортным средством, в частности, когда транспортное средство должно двигаться позади машины для измельчения задним ходом. Еще более высокий уровень напряжения вызван тем, что оператор машины для измельчения, когда он, с одной стороны, должен управлять операцией измельчения при переднем ходе и, с другой стороны, должен контролировать загрузку транспортного средства позади машины для измельчения, если смотреть в направлении перемещения, должен регулировать угол поворота, угол возвышения и/или скорость подачи транспортировочного конвейерного устройства, и должен передавать необходимую информацию водителю транспортного средства.
Таким образом, целью настоящего изобретения является создание автоматизированной машины для измельчения, а также способа выгрузки измельченного материала из машины для измельчения, который обеспечивает автоматическое согласование процесса разгрузки машины для измельчения, находящейся в процессе измельчения, с перемещением транспортного средства.
Упомянутая цель достигается посредством признаков пунктов 1 и 10, соответственно.
Изобретение предпочтительно предусматривает, что упомянутый контроллер содержит систему обнаружения и управления, которая непрерывно определяет изменяемое положение загрузочной поверхности транспортного средства и последнего или единственного поворотного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, относительно корпуса машины, или изменяемое положение загрузочной поверхности транспортного средства относительно поворотного транспортировочного конвейера, и которая непрерывно управляет позиционированием точки падения измельченного материала автоматически через угол поворота и/или угол возвышения и/или скорость подачи поворотного транспортировочного конвейера таким образом, что выгружаемый измельченный материал падает в пределах загрузочной поверхности.
Такой контроллер позволяет оператору машины для измельчения концентрироваться на операции измельчения и на перемещении вдоль конкретной колеи измельчения. Таким образом, осуществляется процесс автоматической выгрузки, который обеспечивает автоматическое согласование процесса выгрузки с перемещением машины для измельчения и транспортного средства даже при движении на повороте. Например, можно также осуществлять управление углом поворота последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, в соответствии с углом рулевого управления автоматизированной машины для измельчения.
Предпочтительно предполагается, что система обнаружения и управления непрерывно управляет позиционированием точки падения измельченного материала автоматически таким образом, что выгружаемый измельченный материал падает в центр загрузочной поверхности или в другую заданную точку падения в пределах загрузочной поверхности.
Загрузочная поверхность может быть расположена, и положение транспортировочного конвейера и скорость подачи поворотного транспортировочного конвейера можно регулировать таким образом, что точка падения на загрузочную поверхность всегда поддерживается в положении, заданном контроллером, независимо от перемещений машины для измельчения и транспортного средства.
Система обнаружения и управления может содержать по меньшей мере один датчик, который непрерывно определяет положение загрузочной поверхности и/или поворотного транспортировочного конвейера транспортировочного конвейерного устройства, и/или может содержать дополнительные датчики, которые определяют угол поворота, угол возвышения и/или скорость подачи транспортировочного конвейера.
Предпочтительный вариант осуществления предусматривает систему обнаружения и управления для непрерывного определения положения загрузочной поверхности и/или последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, посредством первой системы записи изображения или неоптической электронной системы позиционирования, в частности системы радиочастотной идентификации (Radio-Frequency Identification - RFID), которая обеспечивает данные для определения положения загрузочной поверхности относительно корпуса машины или относительно поворотного транспортировочного конвейера.
Система обнаружения и управления может сравнивать данные для определения положения с данными заданного целевого положения, для того чтобы в случае каких-либо отклонений от данных заданного целевого положения осуществлять непрерывное управление положением для положения разгрузочного конца и/или точки падения измельченного материала и/или управление скоростью для скорости подачи в соответствии с заданной точкой падения.
Система обнаружения и управления может содержать вторую систему записи изображения, которая определяет и анализирует состояние заполнения загрузочной поверхности посредством оценки данных в виде изображений и которая непрерывно управляет скоростью подачи и/или положением разгрузочного конца и/или точки падения измельченного материала относительно загрузочной поверхности, чтобы загружать загрузочную поверхность равномерно и/или в соответствии с заданной программой загрузки. Вторая система записи изображения может быть опущена, если система записи изображения уже используется для определения положения загрузочной поверхности, данные в виде изображений которой могут быть использованы также для определения состояния заполнения.
Система обнаружения и управления может определять положение загрузочной поверхности, а также регулировать положение последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, или положение точки падения и скорость подачи таким образом, чтобы точка падения на загрузочную поверхность всегда поддерживалась в положении в пределах загрузочной поверхности, заданном контроллером, независимо от перемещений машины для измельчения и транспортного средства.
Первая и/или вторая система записи изображения или датчик для системы радиочастотной идентификации (RFID) может быть расположен в разгрузочном конце единственного или последнего транспортировочного конвейера, если смотреть в направлении подачи измельченного материала.
Размещение такой системы позиционирования в разгрузочном конце транспортировочного конвейера позволяет определять положение транспортного средства относительно последнего или единственного транспортировочного конвейера машины для измельчения, если смотреть в направлении транспортировки, без необходимости дополнительно определять положение машины для измельчения.
Кроме того, данные в виде изображений могут быть подвергнуты анализу, чтобы определять, как и в какой степени заполнена загрузочная поверхность. Управление скоростью подачи и/или положением разгрузочного конца транспортировочного конвейера или точки падения измельченного материала относительно загрузочной поверхности обеспечивает равномерную загрузку загрузочной поверхности. Состояние заполнения загрузочной поверхности может быть определено и подвергнуто анализу посредством системы записи изображения, и можно осуществлять непрерывное управление скоростью подачи и/или положением разгрузочного конца транспортировочного конвейера относительно загрузочной поверхности, для того чтобы загружать загрузочную поверхность равномерно и/или в соответствии с заданной программой загрузки.
Вместе с тем может быть также предпочтительно изменять точку падения на загрузочной поверхности, чтобы обеспечить равномерную загрузку загрузочной поверхности.
Предполагается, что система обнаружения и управления управляет положением разгрузочного конца транспортировочного конвейерного устройства и тем самым точки падения на загрузочную поверхность посредством регулирования угла бокового поворота поворотного транспортировочного конвейера транспортировочного конвейерного устройства относительно направления перемещения или посредством регулирования угла возвышения поворотного транспортировочного конвейера транспортировочного конвейерного устройства.
Система обнаружения и управления может выдавать сигнал до или после в случае какого-либо отклонения, неисправимого посредством управления положением загрузочной поверхности относительно положения последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, и/или относительно корпуса машины. Упомянутый сигнал может быть использован для того, чтобы вызвать прекращение работы машины или принять меры для предотвращения столкновений между транспортными средствами.
В соответствии с загрузочными поверхностями разных транспортных средств и/или в соответствии с разными условиями загрузки загрузочной поверхности для разных положений и/или точек падения в пределах положения загрузочной поверхности, определяемого посредством системы обнаружения и управления, управляющие данные для угла поворота, угла возвышения и/или скорости подачи могут храниться в карте, которая является доступной для системы обнаружения и управления. RFID система обеспечивает идентификацию, например, загрузочных поверхностей разных транспортных средств.
По меньшей мере одна точка обычно по существу прямоугольной загрузочной поверхности или по существу кубовидной загрузочной емкости соответственно может содержать метку, обнаруживаемую посредством системы обнаружения и управления.
Сигнал управления перемещением, например, визуальный или звуковой сигнал, может быть генерирован в соответствии с сигналами позиционирования. Сигналы управления перемещением для транспортного средства описаны в принципе в DE 10 2009041842 А1.
Упомянутая цель достигается также посредством признаков пункта 12.
В соответствии со способом настоящего изобретения предполагается, что изменяемое положение загрузочной поверхности транспортного средства и последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, относительно корпуса машины, или изменяемое положение загрузочной поверхности транспортного средства относительно последнего или единственного транспортировочного конвейера, если смотреть в направлении транспортировки, непрерывно определяется посредством системы обнаружения и управления, и что непрерывное управление позиционированием точки падения измельченного материала осуществляется автоматически посредством системы обнаружения и управления через угол поворота и/или угол возвышения и/или скорость подачи транспортировочного конвейерного устройства таким образом, что измельченный материал выгружается в пределах загрузочной поверхности.
Непрерывное управление позиционированием точки падения измельченного материала может осуществляться автоматически посредством системы обнаружения и управления таким образом, что измельченный материал выгружается в центр загрузочной поверхности или в другую заданную точку падения в пределах загрузочной поверхности.
Непрерывное управление положением загрузочной поверхности и/или последнего или единственного транспортировочного конвейера транспортировочного конвейерного устройства, если смотреть в направлении транспортировки, может осуществляться посредством системы записи изображения или неоптической электронной системы позиционирования, в частности системы радиочастотной идентификации (RFID), которая обеспечивает данные для определения положения загрузочной поверхности относительно корпуса машины или относительно последнего или единственного транспортировочного конвейера, если смотреть в направлении перемещения.
В одном варианте осуществления, изображение для определения положения загрузочной поверхности относительно разгрузочного конца транспортировочного конвейера и/или для определения состояния заполнения загрузочной поверхности может быть записано и подвергнуто анализу посредством системы записи изображения, используя заданную частоту выборки. Проанализированные данные сравнивают с данными целевого положения, и в случае обнаружения каких-либо отклонений может быть осуществлено управление положением разгрузочного конца транспортировочного конвейера и/или скоростью подачи и/или положением транспортного средства.
Данные целевого положения могут быть определены посредством процедуры обучения.
Положение геометрического центра загрузочной поверхности может быть определено посредством анализа изображений или посредством неоптической системы позиционирования, и положение текущей точки падения на загрузочной поверхности может быть определено посредством анализа изображений, и позиционное управление положением разгрузочного конца и/или точки падения измельченного материала, а также управление скоростью подачи транспортировочного конвейера может быть осуществлено в соответствии с требуемым положением точки падения, так что осуществляется непрерывное регулирование положения текущей точки падения.
Варианты осуществления изобретения описаны ниже более подробно со ссылкой на чертежи.
На чертежах показано:
Фиг. 1 представляет собой машину для измельчения с передней загрузкой,
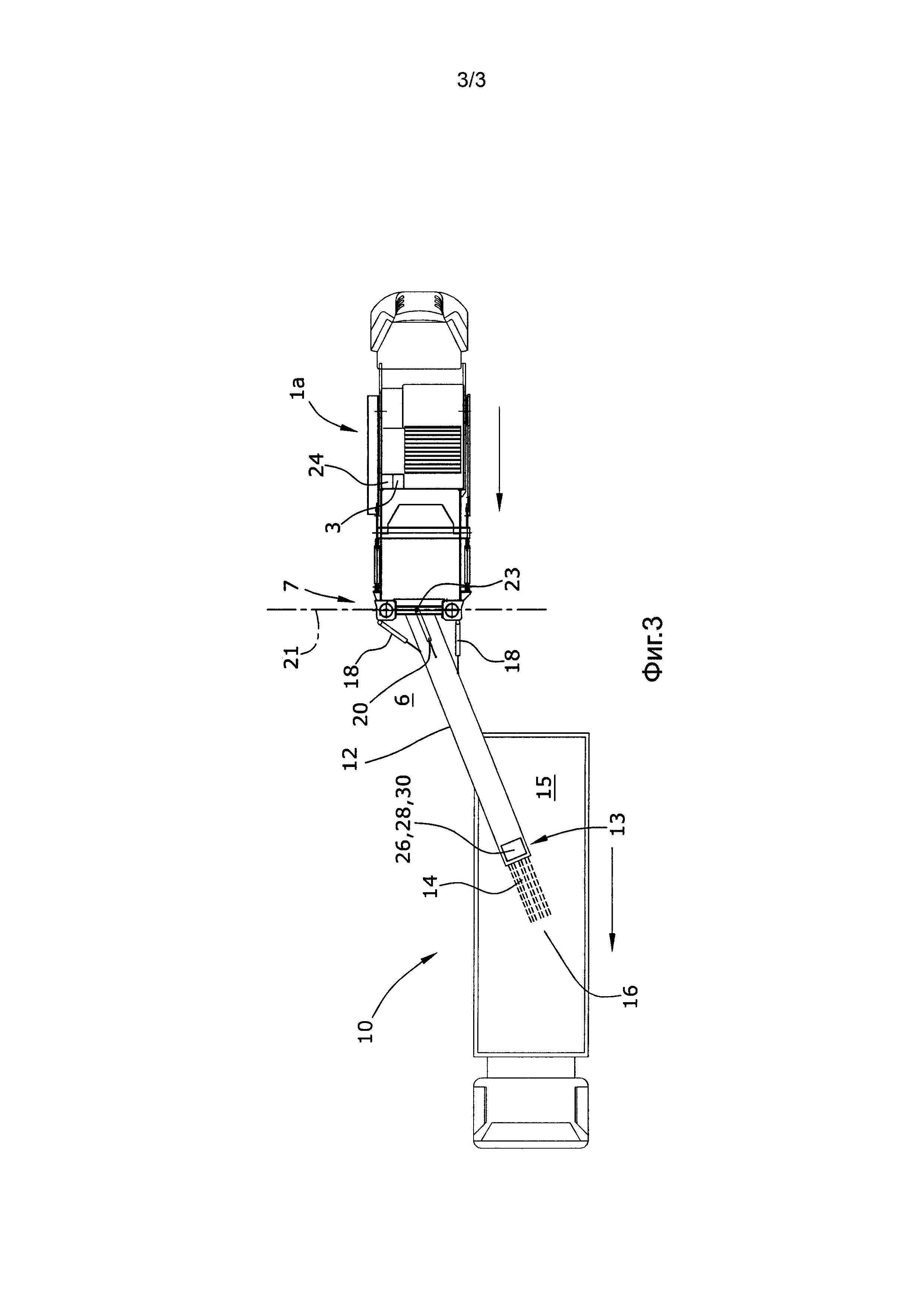
Фиг. 2 представляет собой машину для измельчения с задней загрузкой,
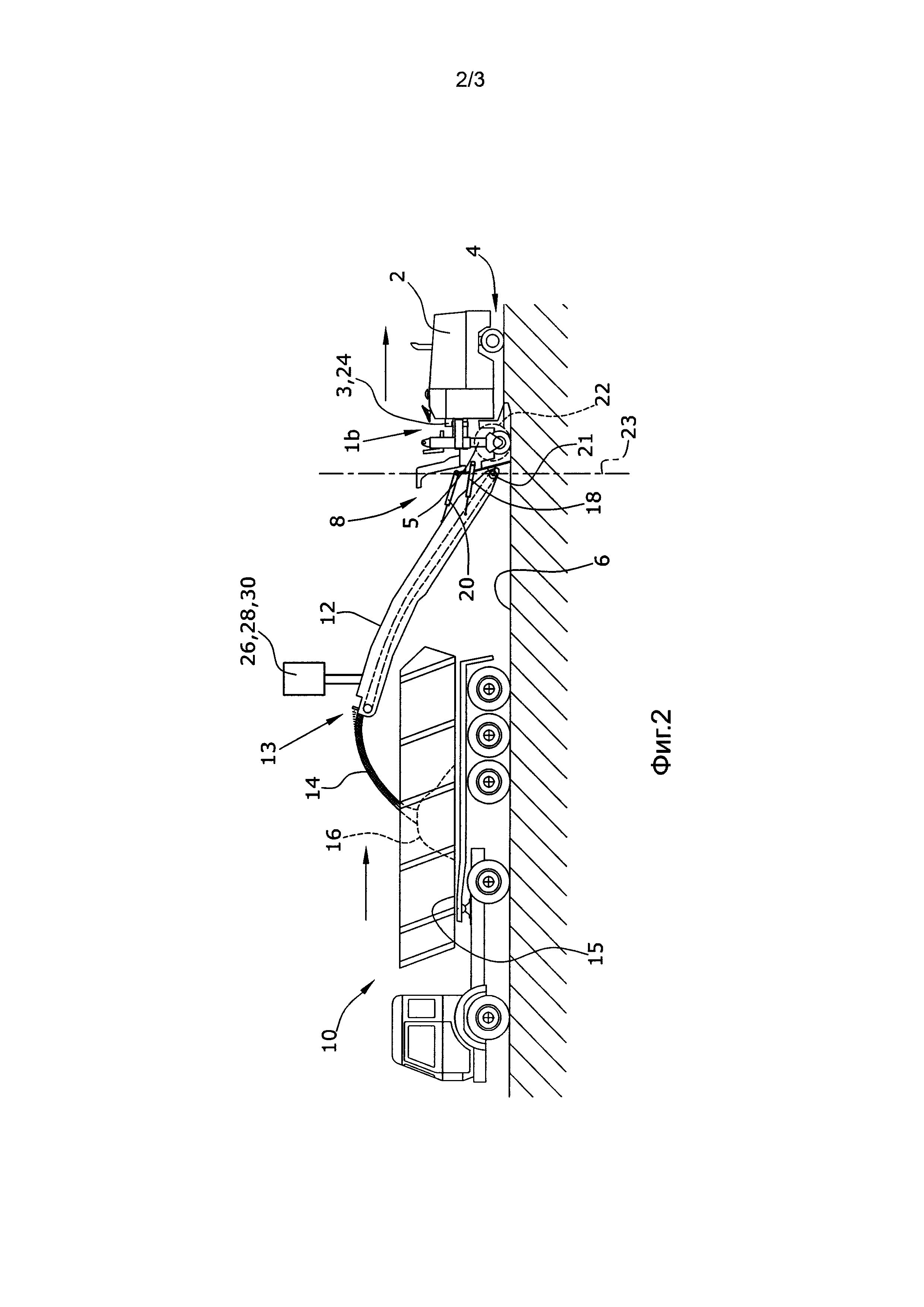
Фиг. 3 представляет собой вид сверху машины для измельчения в соответствии с фиг. 1.
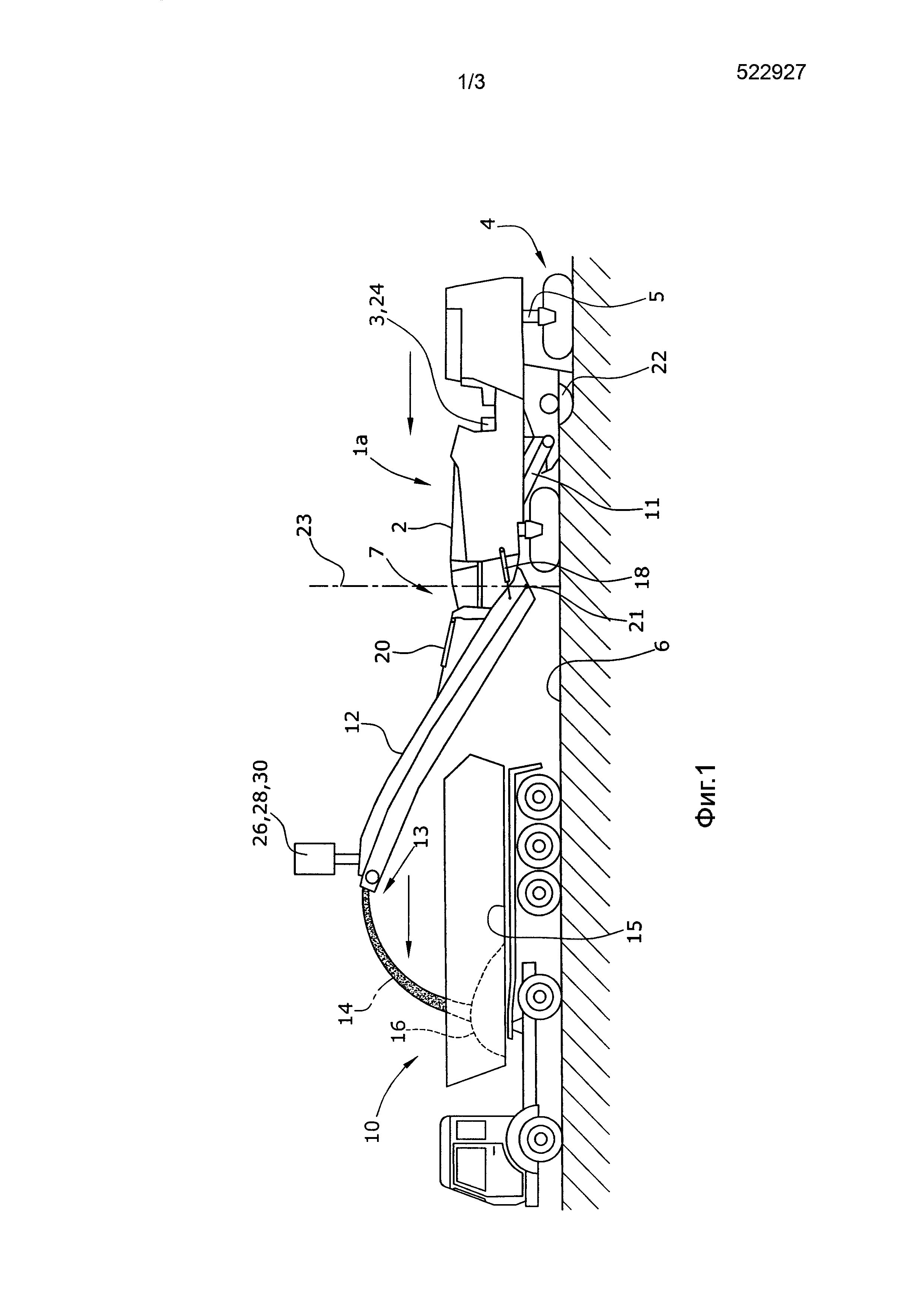
Фиг. 1 показывает машину для измельчения, используя в качестве примера машину 1а для измельчения с передней загрузкой. Дорожно-строительная машина 1 содержит корпус 2 машины, который поддерживается посредством ходовой части 4, содержащей, например, приводные узлы на гусеничном ходу или колеса, при этом упомянутая ходовая часть 4 соединена с корпусом 2 машины посредством по меньшей мере трех устройств регулирования высоты в виде подъемных колонн 5. Как можно понять из фиг. 2, для данного варианта осуществления предусмотрены четыре подъемные колонны 5, которые могут быть использованы для приведения корпуса 2 машины в заданную плоскость, продолжающуюся преимущественно параллельно поверхности 6 дороги, которая поддерживает приводные узлы на гусеничном ходу ходовой части 4.
Машина для измельчения дорожного покрытия, показанная на фиг. 1, содержит, в продольном направлении машины 1а для измельчения, рабочий барабан 22 между приводными узлами на гусеничном ходу ходовой части 4.
Машины 1а, 1b для измельчения могут содержать приводные узлы на гусеничном ходу и/или колеса. Рабочий барабан может быть выполнен с возможностью регулирования по высоте посредством подъемных колонн 5, поддерживающих корпус 2 машины, или относительно корпуса 2 машины.
Другие типы машины 1b для измельчения могут также содержать рабочий барабан 22, например, на высоте задних приводных узлов на гусеничном ходу или колес ходовой части 4.
Транспортировочное конвейерное устройство с по меньшей мере одним транспортировочным конвейером 11, 12 для удаления измельченного материала может быть также расположено в переднем конце 7 или в заднем конце 8 машины 1а, 1b для измельчения.
Фиг. 2 показывает машину 1b для измельчения с задней загрузкой в качестве примера, в котором транспортное средство 10 движется позади машины для измельчения задним ходом.
При наличии достаточного пространства сбоку рядом с машиной 1а, 1b для измельчения, транспортное средство 10 можно также перемещать рядом с машиной 1 для измельчения передним ходом, как показано на фиг. 3.
На фиг. 1-3 направления перемещения соответствующих транспортных средств показаны стрелками.
В варианте осуществления, показанном на фиг. 1, измельченный материал, измельченный посредством рабочего барабана 22, выгружают на загрузочную поверхность 15 транспортного средства 10 посредством первого прочно установленного транспортировочного конвейера 11 транспортировочного конвейерного устройства, который передает измельченный материал 14 на второй поворотный транспортировочный конвейер 12. В результате скорости транспортировочного конвейера 12, измельченный материал 14 не выгружается непосредственно в конце транспортировочного конвейера 12, а перемещается по параболической траектории так, что точка падения 16 на загрузочной поверхности 15 расположена на расстоянии от свободного конца 13 транспортировочного конвейера 12. Транспортировочный конвейер 12 выполнен с возможностью поворота из нейтрального положения влево или вправо посредством узлов 18 поршень-цилиндр, чтобы обеспечить выгрузку измельченного материала 14 на загрузочную поверхность 15 даже при движении на повороте или в случае движения транспортного средства 10 в смещенной колее. Кроме того, водитель транспортного средства машины 1а, 1b для измельчения может регулировать угол возвышения транспортировочного конвейера 12 посредством узла 20 поршень-цилиндр. Угол возвышения, как и скорость подачи транспортировочного конвейера 12, оказывает влияние на параболическую траекторию измельченного материала 14 и на положение точки 16 падения.
Установленный в данный момент угол возвышения относительно горизонтальной первой оси 21 или угол поворота относительно вертикальной второй оси 23 соответственно передаются в систему 24 обнаружения и управления, дополнительно содержащую по меньшей мере один датчик 26, который непрерывно определяет положение загрузочной поверхности 15 и/или последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки. Упомянутый датчик 26 может быть расположен либо на машине 1а, 1b для измельчения в конце, обращенном к транспортировочному конвейерному устройству, либо в свободном конце 13 транспортировочного конвейера 12.
Система 24 обнаружения и управления может быть встроена в контроллер 3 для осуществления перемещения и измельчения или может быть, как минимум, соединена с упомянутым контроллером, для того чтобы в случае необходимости также получать данные о скорости перемещения и/или зарегистрированном угле рулевого управления машины 1а, 1b для измельчения и скорости подачи транспортировочного конвейера 12.
Система 24 обнаружения и управления определяет изменяемое положение загрузочной поверхности 15 транспортного средства 10 и последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки, относительно корпуса 2 машины, и непрерывно и автоматически управляет позиционированием точки 16 падения измельченного материала через угол поворота и/или угол возвышения и/или скорость подачи транспортировочного конвейерного устройства, так что выгружаемый измельченный материал 14 падает, как минимум, в пределах загрузочной поверхности 15. Как вариант, можно также непрерывно определять изменяемое положение загрузочной поверхности 15 транспортного средства 10 относительно последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки, для того чтобы осуществлять операцию управления.
Система 24 обнаружения и управления может также выполнять задачу равномерного заполнения загрузочной поверхности 15. Для этой цели может быть предусмотрена программа загрузки для загрузки загрузочной поверхности 15 в соответствии с заданной системой. В данной конструкции, состояние заполнения загрузочной поверхности 15 может быть зарегистрировано и подвергнуто анализу посредством системы записи изображения, для того чтобы непрерывно управлять скоростью подачи и/или положением разгрузочного конца 13 последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки, относительно загрузочной поверхности 15.
Управляющие данные для разных положений и/или точек 16 падения могут храниться в карте в соответствии с загрузочными поверхностями 15 разных транспортных средств 10 и/или в соответствии с разными условиями загрузки загрузочной поверхности 15. Такая память в карте может быть встроена в систему 24 обнаружения и управления или в контроллер 3. Управляющие данные относятся к углу поворота, углу возвышения и/или скорости подачи транспортировочного конвейера 12 для разных положений и/или точек 16 падения в пределах положения загрузочной поверхности 15, определяемого посредством системы 24 обнаружения и управления.
Система 24 обнаружения и управления непрерывно определяет положение загрузочной поверхности 15 и/или последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки, посредством системы 28 записи изображения или неоптической электронной системы позиционирования, которая обеспечивает данные для определения положения загрузочной поверхности 15 относительно корпуса 2 машины или относительно последнего или единственного транспортировочного конвейера 12, если смотреть в направлении транспортировки. Информация, выдаваемая системой 28 записи изображения, может быть подвергнута оценке посредством известных по существу методов анализа изображения. Одним примером неоптической электронной системы позиционирования является система радиочастотной идентификации (RFID), которая дополнительно обеспечивает возможность идентификации конкретной загрузочной поверхности 15 конкретного транспортного средства 10.
При определении местоположения загрузочной поверхности 15 посредством RFID используются постоянно установленные RFID метки на транспортном средстве 10, в частности на загрузочной поверхности 15.
При определении местоположения с использованием узлов датчиков Bluetooth в качестве дополнительного неоптического метода определения местоположения, используют узлы датчиков, распределенные в пространстве в качестве меток, и измеряют силу поля сигналов, которая зависит от расстояния.
Само собой разумеется, что можно также использовать комбинацию разных методов определения местоположения.
Как правило, можно использовать оптические и квазиоптические (радио) методы измерения длины и угла, а также разные способы измерения времени для разностей времени и разностей времени распространения.
Система 24 обнаружения и управления может сравнивать данные для определения положения с данными заданного положения, для того чтобы, в случае каких-либо отклонений от данных заданного целевого положения, осуществлять непрерывное управление положением разгрузочного конца 13 и/или точки 16 падения измельченного материала 14 и/или управление скоростью подачи.
Данные целевого положения могут быть определены посредством процесса обучения в том смысле, что положения транспортных средств 1а, 1b, 10 изменяют в соответствии с реалистическими ситуациями, и параметры, требуемые для каждой такой ситуации, а именно угол поворота, угол возвышения и скорость подачи транспортировочного конвейера, сохраняют в памяти. Таким же образом может быть также создана программа загрузки. При этом могут учитываться изменения в управлении, появляющиеся, например, во время движения при повороте. В данном способе данные, считываемые посредством операции считывания, могут также отличаться, если транспортное средство 10 движется слева или справа около колеи измельчения или в колее измельчения машины 1а, 1b для измельчения.
Резцедержатель и базирующая деталь для приема резцедержателя
Узел выбрасывателя для дорожной фрезерной машины или тому подобного
Выбрасыватель или выбрасывающий узел дорожно-фрезерной машины или т.п.
Полозовый сегмент для защищающего кромку элемента дорожной фрезы и защищающий кромку элемент для дорожной фрезы
Способ определения фрезеруемого объема или фрезеруемой площади фрезеруемой поверхности и строительная машина
Резцедержатель и система резцедержателя с резцедержателем и корпусом
Резцедержатель и система резцедержателя с резцедержателем и корпусом
Резцедержатель
Дорожная фрезерная машина для обработки дорожных покрытий, а также способ поворота перемещаемого блока привода дорожной фрезерной машины
Резцедержатель
Резцедержатель и базирующая деталь для приема резцедержателя
Узел выбрасывателя для дорожной фрезерной машины или тому подобного
Выбрасыватель или выбрасывающий узел дорожно-фрезерной машины или т.п.
Полозовый сегмент для защищающего кромку элемента дорожной фрезы и защищающий кромку элемент для дорожной фрезы
Способ определения фрезеруемого объема или фрезеруемой площади фрезеруемой поверхности и строительная машина
Резцедержатель и система резцедержателя с резцедержателем и корпусом
Резцедержатель и система резцедержателя с резцедержателем и корпусом
Резцедержатель
Дорожная фрезерная машина для обработки дорожных покрытий, а также способ поворота перемещаемого блока привода дорожной фрезерной машины
Резцедержатель

