Результат интеллектуальной деятельности: НАВИГАЦИОННАЯ СИСТЕМА И СПОСОБ РАЗРЕШЕНИЯ ЦЕЛОЧИСЛЕННЫХ НЕОДНОЗНАЧНОСТЕЙ С ИСПОЛЬЗОВАНИЕМ ОГРАНИЧЕНИЯ НЕОДНОЗНАЧНОСТИ ДВОЙНОЙ РАЗНОСТИ
Вид РИД
Изобретение
Родственная заявка
Данная заявка испрашивает приоритет предварительной заявки на патент США № 61/432,172, поданной 12 января 2011 г., которая включена в данный документ по ссылке во всей своей полноте.
Область техники, к которой относится изобретение
Описанные варианты осуществления относятся, в основном, к системам и способам генерирования корректирующей информации для соответствующих спутников в спутниковой навигационной системе, и, более конкретно, к генерированию улучшенной корректирующей информации посредством разрешения целочисленных неоднозначностей в измерениях дальности, выполняемых опорными станциями с использованием ограничений целочисленной неоднозначности двойной разности.
Уровень техники
Фильтр Калмана может использоваться для нахождения статических и динамических параметров в динамической системе, имеющей зашумленные измерения. Одной такой системой является глобальная навигационная спутниковая система (GNSS), в которой на спутниковые навигационные измерения навигационными приемниками (например, приемниками на поверхности Земли или около нее) оказывают влияние несколько источников шума (например, эффекты многолучевого распространения, ионосферные эффекты, тропосферные эффекты и т.д.).
Одним применением фильтров Калмана является фильтр Калмана (например, в широкозонной дифференциальной системе глобального позиционирования (WADGPS)), который отслеживает орбиты тридцати глобальных навигационных спутников, используя набор опорных станций (например, 50-80 опорных станций), расположенных по всему миру. Результирующие орбитальные решения сравниваются с местоположениями данных «альманаха» и траекториями спутников (ниже в данном документе называемые данные альманаха), объединенные с эфемеридной информацией, передаваемой широковещательно спутниками или другими системами, которые предоставляют навигационным приемникам уточнения для данных альманаха. Разность между орбитальными решениями, полученными фильтром Калмана, и уточненными данными альманаха используется для генерирования корректирующей информации, иногда называемой вспомогательными данными или дифференциальными данными, которые передаются широковещательно на навигационные приемники абонентов (например, навигационные приемники, владельцы которых оплатили абонентскую плату). StarFire, система и служба, предоставляемая компанией NavCom Technology, Inc., представляет собой пример системы, которая отслеживает орбиты глобальных навигационных спутников и передает корректирующую информацию на навигационные приемники абонентов. Дифференциальные данные, когда они используются совместимыми навигационными приемниками, позволяют этим приемникам более точно определять свое положение, в некоторых реализациях с точностью лучше одного метра.
Является очень желательным обеспечение системы и способа, которые определяют улучшенную корректирующую информации, чтобы позволить навигационным приемникам достигать более высоких уровней точности.
Сущность изобретения
Чтобы обеспечить улучшенную корректирующую информацию, некоторые варианты осуществления обеспечивают систему, долговременный, считываемый компьютером носитель данных, включающий в себя инструкции, и реализуемый на компьютере способ для приема от множества опорных станций в известных местоположениях множества спутниковых навигационных измерений сигналов от множества глобальных навигационных спутников. Способ включает в себя вычисление состояния множества глобальных навигационных спутников, основываясь на принятых спутниковых навигационных измерениях, идентификацию множества базовых линий, причем каждая базовая линия соответствует паре опорных станций, и для каждой идентифицированной базовой линии вычисление плавающих и целочисленных значений для целочисленной неоднозначности двойной разности, соответствующей идентифицированной базовой линии. Способ дополнительно включает в себя идентификацию, в соответствии с вычисленными плавающими и целочисленными значениями для целочисленных неоднозначностей двойной разности, соответствующих множеству идентифицированных базовых линий, набора из одной или нескольких целочисленных неоднозначностей двойной разности, которые удовлетворяют набору заданных условий. Кроме того, способ включает в себя уточнение вычисленного состояния множества глобальных навигационных спутников, в соответствии с целочисленным ограничением, применяемым к каждой целочисленной неоднозначности двойной разности в идентифицированном наборе из одной или нескольких целочисленных неоднозначностей двойной разности, которые удовлетворяют набору заданных условий, для получения уточненного вычисленного состояния множества глобальных навигационных спутников.
В некоторых вариантах осуществления способ включает в себя вычисление корректирующей информации в соответствии с уточненным вычисленным состоянием множества глобальных навигационных спутников и передачу корректирующей информации на множество навигационных приемников. Обычно корректирующая информация включает в себя корректирующие значения для каждого из глобальных навигационных спутников в множестве глобальных навигационных спутников, и, в основном, включает в себя корректирующие значения для двух или более из глобальных навигационных спутников в множестве глобальных навигационных спутников.
В некоторых вариантах осуществления набор заданных условий для соответствующей целочисленной неоднозначности двойной разности включает в себя требование, чтобы дробная разность между целочисленными и плавающими значениями соответствующей целочисленной неоднозначности двойной разности не превышала первое заданное пороговое значение. Кроме того, в некоторых вариантах осуществления способ включает в себя вычисление дисперсии и среднеквадратического отклонения соответствующей целочисленной неоднозначности двойной разности, и набор заданных условий для соответствующей целочисленной неоднозначности двойной разности включает в себя требование, чтобы среднеквадратическое отклонение соответствующей целочисленной неоднозначности двойной разности не превышало второго заданного порогового значения. Кроме того, в некоторых вариантах осуществления набор заданных условий для соответствующей целочисленной неоднозначности двойной разности включает в себя требование, чтобы заданное W-отношение имело значение, которое превышает третье заданное пороговое значение.
В некоторых вариантах осуществления идентифицированные базовые линии включают в себя только математически независимые базовые линии.
В некоторых вариантах осуществления идентификация набора из одной или нескольких целочисленных неоднозначностей двойной разности, которые удовлетворяют набору заданных условий, включает в себя фильтрацию целочисленных неоднозначностей двойной разности, соответствующих идентифицированным базовым линиям, чтобы предотвратить включение в идентифицированный набор любых целочисленных неоднозначностей двойной разности, которые не удовлетворяют заданным критериям фильтрации.
Краткое описание чертежей
Фиг.1 представляет собой блок-схему, иллюстрирующую глобальную спутниковую навигационную систему согласно некоторым вариантам осуществления.
Фиг.2 представляет собой блок-схему, иллюстрирующую спутниковый навигационный приемник согласно некоторым вариантам осуществления.
Фиг.3 представляет собой блок-схему, иллюстрирующую компьютерную систему согласно некоторым вариантам осуществления.
Фиг.4 представляет собой блок-схему последовательности операций способа вычисления оцененного состояния множества глобальных навигационных спутников и уточнения вычисленного оцененного состояния посредством применения ограничений к одной или нескольким целочисленным неоднозначностям двойной разности, которые удовлетворяют заданным критериям, согласно некоторым вариантам осуществления.
Фиг.5A-5B изображают блок-схему последовательности операций способа уточнения вычисленного оцененного состояния множества глобальных навигационных спутников согласно некоторым вариантам осуществления.
Фиг.6A-6B изображают блок-схему последовательности операций способа уточнения вычисленного оцененного состояния множества глобальных навигационных спутников согласно некоторым вариантам осуществления.
Фиг.7 представляет собой блок-схему последовательности операций способа уточнения состояния спутникового навигационного приемника (например, мобильного спутникового навигационного приемника, отличного от опорных станций), основанного на корректирующих сигналах, посылаемых компьютерной системой (например, системой по фиг.3), согласно некоторым вариантам осуществления.
Подобные условные обозначения относятся к соответствующим элементам на всех чертежах.
Описание вариантов осуществления
Теперь выполняется подробная ссылка на варианты осуществления, примеры которых изображены на прилагаемых чертежах. В нижеследующем подробном описании излагаются многочисленные конкретные подробности. Однако для специалиста в данной области очевидно, что настоящее изобретение, определенное в формуле изобретения, может быть осуществлено на практике без многих из этих конкретных подробностей. В других случаях, общеизвестные способы, процедуры, компоненты, схемы и сети не были описаны подробно, чтобы излишне не затруднять понимание аспектов вариантов осуществления.
Также понятно, что, хотя термины «первый», «второй» и т.д. могут использоваться в данном документе для описания различных элементов, эти элементы не должны ограничиваться этими терминами. Эти термины используются только для того, чтобы отличать один элемент от другого. Например, первый контакт мог бы быть назван вторым контактом, и, аналогично, второй контакт мог бы быть назван первым контактом. Первый контакт и второй контакт оба являются контактами, но они не являются одним и тем же контактом.
Терминология, используемая при описании в данном документе, предназначена только для целей описания конкретных вариантов осуществления и, как предполагается, не ограничивает изобретение. Как используется в описании изобретения и прилагаемой формуле изобретения, единственное число, как предполагается, включают в себя также формы множественного числа, если контекст ясно не указывает иначе. Также понятно, что термин «и/или», как он используется в данном документе, ссылается и охватывает любую и все возможные комбинации одного или нескольких из ассоциированных перечисленных предметов. Также понятно, что термины «содержит» и/или «содержащий», когда они используются в данном описании изобретения, определяют присутствие заявленных признаков, целых чисел, этапов, операций, элементов и/или компонентов, но не исключают присутствие или добавление одного или нескольких других признаков, целых чисел, этапов, операций, элементов, компонентов и/или их групп.
Как используется в данном документе, термин «если» может толковаться со значением «когда», или «во время», или «в ответ на определение», или «в соответствии с определением», или «в ответ на обнаружение», что является действительным заявленное предварительное условие в зависимости от контекста. Аналогично, фраза «если определяется, [что является действительным заявленное предварительное условие]» или «если [является действительным заявленное предварительное условие]», или «когда [является действительным заявленное предварительное условие]» может толковаться со значением «при определении», или «в ответ на определение», или «в соответствии с определением», или «при обнаружении», или «в ответ на обнаружение», что является действительным заявленное предварительное условие, в зависимости от контекста.
Фиг.1 представляет собой блок-схему, иллюстрирующую глобальную спутниковую навигационную систему 100 согласно некоторым вариантам осуществления. Глобальная спутниковая навигационная система 100 включает в себя глобальные навигационные спутники 110-1 - 110-N. Каждый из глобальных навигационных спутников 110-1 - 110-N передает по меньшей мере два несущих сигнала. В случае глобальной системы позиционирования (GPS) несущие сигналы включают в себя сигналы L1 и L2, имеющие частоты 1,5754 ГГц и 1,2276 ГГц, и длины волн 0,1903 м и 0,2442 м соответственно. GPS следующего поколения будет предлагать третий несущий сигнал L5, который будет иметь частоту 1,1765 ГГц и длину волны 0,2548 м. Отметим, что, хотя варианты осуществления, описанные в данном документе, описываются в отношении GPS, могут использоваться другие глобальные навигационные спутниковые системы (GNSS), такие как ГЛОНАСС и Галилео.
В некоторых вариантах осуществления несущие сигналы принимаются спутниковым навигационным приемником 120. Спутниковый навигационный приемник может использоваться пользователем 121 для навигации или для определения текущего положения пользователя 121. Чтобы выполнить операции навигации и/или определения положения, спутниковый навигационный приемник 120 принимает сигналы от поднабора глобальных навигационных спутников 110-1 - 110-N (т.е. поднабор включает в себя глобальные навигационные спутники в пределах видимости спутникового навигационного приемника 120). Спутниковый навигационный приемник 120 затем выполняет спутниковые навигационные измерения, основываясь на сигналах, и вычисляет состояние спутникового навигационного приемника 120, основываясь на спутниковых навигационных измерениях. В некоторых вариантах осуществления состояние спутникового навигационного приемника включает в себя положение спутникового навигационного приемника (например, X, Y и Z или широту, долготу и зенитные составляющие положения), скорость спутникового навигационного приемника и время. Спутниковый навигационный приемник 120 описывается более подробно ниже в отношении фиг.2.
В некоторых вариантах осуществления несущие сигналы принимаются опорными станциями 140-1 - 140-M в известных местоположениях (например, наблюдаемых местоположениях). Опорные станции включают в себя приемник GNSS, который принимает сигналы от глобальных навигационных спутников 110-1 - 110-N. В любой один момент времени приемник GNSS принимает сигналы только от глобальных навигационных спутников 110, которые находятся в пределах видимости антенны приемника. Опорные станции 140-1 - 140-M обычно используются для выполнения операций дифференциальной GPS и/или отслеживания орбит глобальных навигационных спутников 110-1 - 110-N. Чтобы выполнять эти операции, каждая из опорных станций 140-1 - 140-M принимает сигналы от поднабора глобальных навигационных спутников 110-1 - 110-N (т.е. поднабора глобальных навигационных спутников 110-1 - 110-N, который находится в пределах видимости каждой из опорных станций 140-1 - 140-M) и выполняет спутниковые навигационные измерения, основанные на сигналах. В некоторых вариантах осуществления опорные станции 140-1 - 140-M передают спутниковые навигационные измерения на компьютерную систему 130 по сети 150. Опорные станции 140-1 - 140-M описываются более подробно ниже в отношении фиг.2.
В некоторых вариантах осуществления компьютерная система 130 обрабатывает спутниковые навигационные измерения, принимаемые от опорных станций 140-1 - 140-M, для определения состояния глобальных навигационных спутников 110-1 - 110-N. В некоторых вариантах осуществления состояние глобальных навигационных спутников включает в себя положение каждого из глобальных навигационных спутников 110-1 - 110-N (например, X, Y и Z или широту, долготу и зенитные составляющие положения), скорость каждого из глобальных навигационных спутников 110-1 - 110-N и время. Компьютерная система 130 затем генерирует корректирующие сигналы 132 (иногда называемые вспомогательные сигналы), которые корректируют орбитальные отклонения глобальных навигационных спутников 110-1 - 110-N. Отметим, что ошибки в расчетных орбитах и часах глобальных навигационных спутников 110-1 - 110-N упоминаются как орбитальные отклонения в данном описании изобретения. Компьютерная система 130 посылает корректирующие сигналы 132 на спутники 160-1 - 160-P связи, которые, в свою очередь, передают корректирующие сигналы 132 на спутниковый навигационный приемник 120 и/или опорные станции 140-1 - 140-M. Альтернативно, компьютерная система 130 посылает корректирующие сигналы 132 на спутниковый навигационный приемник 120 и/или опорные станции 140-1 - 140-M по сети (например, сети 150). Компьютерная система 130 описывается более подробно ниже в отношении фиг.3.
Сеть 150, в основном, может включать в себя любой тип проводного или беспроводного канала связи, способного связывать вместе вычислительные узлы. Она включает в себя, но не ограничивается ими, локальную сеть, глобальную сеть или объединение сетей. В некоторых вариантах осуществления сеть 150 включает в себя Интернет.
Отметим, что существует два типа измерений GPS (т.е. спутниковых навигационных измерений), которые обычно выполняются (например, спутниковым навигационным приемником 120 и/или опорными станциями 140-1 - 140-M): измерения псевдодальности и измерения фазы несущей. Операции, используемые для определения состояния спутникового навигационного приемника 120, и операции, используемые для определения состояния глобальных навигационных спутников 110-1 - 110-N, основанные на этих спутниковых навигационных измерениях, хорошо известны в технике и, поэтому, в данном описании изобретения не предоставляется подробное объяснение этих операций.
Фиг.2 представляет собой блок-схему, иллюстрирующую спутниковый навигационный приемник 120 согласно некоторым вариантам осуществления. Эта блок-схема также изображает опорные станции 140. Спутниковый навигационный приемник 120 обычно включает в себя один или несколько блоков 202 обработки (CPU), один или несколько сетевых или других интерфейсов 204 связи, память 210 и одну или несколько шин 209 связи для соединения между собой этих компонентов. Шины 209 связи могут включать в себя схемы (иногда называемые набор микросхем), которые соединяют между собой и управляют связью между системными компонентами. Спутниковый навигационный приемник 120 необязательно может включать в себя пользовательский интерфейс 205, содержащий устройство 206 отображения и одно или несколько устройств 208 ввода (например, одно или несколько из клавиатуры, мыши, сенсорного экрана, клавишной панели и т.д.). Спутниковый навигационный приемник 120 также включает в себя одну или несколько антенн GNSS, выполненных с возможностью приема сигналов, передаваемых глобальными навигационными спутниками 110-1 - 110-N. Память 210 включает в себя высокоскоростное оперативное запоминающее устройство, такое как динамическое оперативное запоминающее устройство (DRAM), статическое оперативное запоминающее устройство (SRAM), оперативное запоминающее устройство с удвоенной скоростью передачи данных (DDR RAM) или другие устройства твердотельной памяти с произвольным доступом; и может включать в себя энергонезависимую память, такую как одно или несколько запоминающих устройств на магнитных дисках, запоминающих устройств на оптических дисках, устройств флэш-памяти, или другие энергонезависимые твердотельные запоминающие устройства. Память 210 необязательно может включать в себя одно или несколько запоминающих устройств, расположенных удаленно от CPU 202. Память 210, или, альтернативно, энергонезависимое устройство(-а) памяти в памяти 210, содержит долговременный, считываемый компьютером носитель данных. В некоторых вариантах осуществления память 210 или считываемый компьютером носитель данных памяти 210 хранит нижеследующие программы, модули и структуры данных или их поднабор:
операционную систему 212, которая включает в себя процедуры для обработки различных служб базовой системы и для выполнения задач, зависимых от аппаратных средств;
модуль 214 связи, который используется для подключения спутникового навигационного приемника 120 к другим компьютерным системам при помощи одного или нескольких интерфейсов 204 связи (проводных или беспроводных) или одной или нескольких сетей связи, таких как Интернет, другие глобальные сети, локальные сети, региональные сети и т.п.;
модуль 216 пользовательского интерфейса, который принимает команды от пользователя при помощи устройств 208 ввода и генерирует объекты пользовательского интерфейса в устройстве 206 отображения;
модуль 218 GNSS, который принимает и обрабатывает сигналы от глобальных навигационных спутников 110-1 - 110-N при помощи одной или нескольких антенн 260 GNSS, причем модуль 218 GNSS включает в себя модуль 220 фильтра Калмана, выполненный с возможностью оценки состояния 226 спутникового навигационного приемника 120, основываясь на спутниковых навигационных измерениях 224, полученных из сигналов, принятых от глобальных навигационных спутников 110 в пределах видимости антенны 260 приемника;
эфемеридные данные 228, которые включают в себя набор параметров, используемых приемником 120 для прогнозирования орбиты, и часов глобальных навигационных спутников; и
корректирующие сигналы 132 (например, сигналы, принимаемые от службы, которая обеспечивает корректирующие сигналы GNSS, представленные системой 130 на фиг.1) для ошибок в расчетных орбитах и часах глобальных навигационных спутников 110-1 - 110-N.
В некоторых вариантах осуществления корректирующие сигналы 132 включают в себя корректировки не только для ошибок в расчетных орбитах (например, орбитальное положение и скорость) и часов спутников, но также для коррекции для компенсации тропосферных эффектов и ионосферных эффектов, широкополосных и узкополосных дробных смещений фазы и/или межчастотные смещения в измерениях кода и фазы несущей.
На каждой соответствующей опорной станции 140 модуль 214 связи включает в себя инструкции 142 для отправки измерений, выполненных соответствующей опорной станцией 140, на компьютерную систему 130 при помощи одного или нескольких интерфейсов 204 связи (проводных или беспроводных) и одной или нескольких сетей 150 связи, такой как Интернет, других глобальных сетей, локальных сетей, региональных сетей и т.п. Опорные станции 140 обычно имеют более существенный корпус, чем мобильные приемники, обычно здание или другую прочную конструкцию, которая долговременно располагается в известном местоположении.
Каждый из идентифицированных выше элементов может сохраняться на одном или нескольких из ранее упомянутых устройств памяти и соответствует набору инструкций для выполнения описанной выше функции. Набор инструкций может исполняться одним или несколькими процессорами (например, CPU 202). Нет необходимости выполнять идентифицированные выше модули или программы (т.е. наборы инструкций) в виде отдельных программ, процедур или модулей программного обеспечения, и, таким образом, различные поднаборы этих модулей могут объединяться или иным образом переупорядочиваться в различных вариантах осуществления. В некоторых вариантах осуществления память 210 может хранить поднабор модулей и структур данных, идентифицированных выше. Кроме того, память 210 может хранить дополнительные модули и структуры данных, не описанные выше.
Хотя фиг.2 изображает «спутниковый навигационный приемник», фиг.2 предназначена больше в качестве функционального описания различных признаков, которые могут присутствовать в спутниковом навигационном приемнике, чем в виде структурной схемы вариантов осуществления, описанных в данном документе. На практике и как понятно для специалиста в данной области техники, предметы, показанные отдельно, могут объединяться, и некоторые предметы могут разделяться.
В некоторых вариантах осуществления каждая из опорных станций 140-1 - 140-M включает в себя спутниковый навигационный приемник, который включает в себя компоненты и модули, описанные в отношении фиг.2.
Фиг.3 представляет собой блок-схему, иллюстрирующую компьютерную систему 130 согласно некоторым вариантам осуществления. Компьютерная система 130 обычно включает в себя один или несколько блоков 302 обработки (CPU), один или несколько сетевых или других интерфейсов 304 связи (например, для связи с опорными станциями 140 и спутниками 160 связи, фиг.1), память 310 и одну или несколько шин 309 связи для соединения между собой этих компонентов. Шины 309 связи могут включать в себя схемы (иногда называемые набором микросхем), которые соединяют между собой и управляют связью между системными компонентами. Компьютерная система 130 необязательно может включать в себя пользовательский интерфейс 305, содержащий устройство 306 отображения и одно или несколько устройств 308 ввода (например, одно или несколько из клавиатуры, мыши, сенсорного экрана, клавишной панели и т.д.). Память 310 включает в себя высокоскоростную память с произвольным доступом, такую как DRAM, SRAM, DDR RAM или другие устройства твердотельной памяти с произвольным доступом; и может включать в себя энергонезависимую память, такую как одно или несколько запоминающих устройств на магнитных дисках, запоминающих устройств на оптических дисках, устройств флэш-памяти, или других энергонезависимых твердотельных запоминающих устройств. Память 310 необязательно может включать в себя одно или несколько запоминающих устройств, расположенных удаленно от CPU 302. Память 310, или, альтернативно, устройство(-а) энергонезависимой памяти в памяти 310, содержит долговременный, считываемый компьютером носитель данных. В некоторых вариантах осуществления память 310 или считываемый компьютером носитель данных памяти 310 хранит нижеследующие программы, модули и структуры данных или их поднабор:
операционную систему 312, которая включает в себя процедуры для обработки различных служб базовой системы и для выполнения задач, зависимых от аппаратных средств;
модуль 314 связи, который используется для соединения компьютерной системы 130 с другими компьютерными системами при помощи одного или нескольких интерфейсов 304 связи (проводных или беспроводных) и одной или нескольких сетей связи (например, сети 150 на фиг.1), таких как Интернет, другие глобальные сети, локальные сети, региональные сети или комбинации таких сетей;
модуль 318 отслеживания спутников, который принимает и обрабатывает сигналы от глобальных навигационных спутников 110-1 - 110-N при помощи опорных станций 140-1 - 140-M, причем модуль 318 отслеживания спутников включает в себя модуль 320 фильтра Калмана, выполненный с возможностью оценки состояния 326 глобальных навигационных спутников 110-1 - 110-N, основываясь на спутниковых навигационных измерениях 324, полученных от набора опорных станций 140 (фиг.1), и модуль 322 измерения разрешения целочисленной неоднозначности, который определяет, когда было выполнено заданное условие, и затем модифицирует процесс обновления фильтра Калмана для применения заданного ограничения в отношении одной или нескольких целочисленных неоднозначностей двойной разности при обновлении состояния фильтра Калмана, как описано более подробно ниже в отношении фиг.4-5;
эфемеридные данные 328, которые включают в себя набор параметров, используемых компьютерной системой 130 для прогнозирования орбиты и часов глобальных навигационных спутников;
информацию 340 о положении опорной станции, которая задает наблюдаемые известные положения опорных станций 140 (фиг.1); и
корректирующий модуль 330, который использует состояние 326 глобальных навигационных спутников 110-1 - 110-N для генерирования корректирующих сигналов 132, которые корректируют орбитальные отклонения (т.е. ошибки в расчетных орбитах и часах) глобальных навигационных спутников 110-1 - 110-N относительно расчетных орбит и часов, передаваемых широковещательно со спутников.
Как отмечено в описании спутникового навигационного приемника 120 (фиг.2), спутниковые навигационные измерения 324, полученные от набора опорных станций 140, основываются на сигналах, принимаемых опорными станциями от глобальных навигационных спутников 110-1 - 110-N. Также, как отмечено выше, корректирующие сигналы 132, генерируемые модулем коррекции, могут включать в себя коррекции, которые компенсируют дополнительные источники ошибок навигационного сигнала, в дополнение к ошибкам в расчетных орбитах и часах глобальных навигационных спутников 110, таких как тропосферные эффекты и ионосферные эффекты, широкополосные и узкополосные дробные смещения фазы спутников и/или межчастотные смещения в измерениях кода и фазы несущей.
Каждый из идентифицированных выше элементов может сохраняться на одном или нескольких из ранее упомянутых устройств памяти и соответствует набору инструкций для выполнения описанной выше функции. Набор инструкций может исполняться одним или несколькими процессорами (например, CPU 302). Нет необходимости осуществлять идентифицированные выше модули или программы (т.е. наборы инструкций) в виде отдельных программ, процедур или модулей программного обеспечения, и, таким образом, различные поднаборы этих модулей могут объединяться или иным образом переупорядочиваться в различных вариантах осуществления. В некоторых вариантах осуществления память 310 может хранить поднабор модулей и структур данных, идентифицированных выше. Кроме того, память 310 может хранить дополнительные модули и структуры данных, не описанные выше.
Хотя фиг.3 изображает «компьютерную систему», фиг.3 предназначена больше в качестве функционального описания различных признаков, которые могут присутствовать в наборе компьютерных систем, чем в виде структурной схемы вариантов осуществления, описанных в данном документе. На практике и как понятно для специалиста в данной области техники, элементы, показанные отдельно, могут объединяться, и некоторые элементы могут разделяться. Например, некоторые элементы, показанные отдельно на фиг.3, могут быть реализованы на одиночных компьютерных системах, и одиночные элементы могут быть реализованы одной или несколькими компьютерными системами. Фактическое количество компьютерных систем и то, как признаки распределяются среди них, изменяется от одной реализации к другой, и может зависеть частично от количества трафика данных, которое система должна обрабатывать во время периодов максимального использования, а также во время периодов среднего использования.
Определить состояние для множества глобальных навигационных спутников, используя оценку стандартного фильтра Калмана
Перед переходом к описанию применения, в вычислениях обновления состояния, выполняемых фильтром Калмана, ограничений на значения неоднозначности двойной разности, чтобы генерировать улучшенное состояние Калмана, из которого генерируется корректирующая информация, полезно описать стандартную реализацию фильтра Калмана. Отметим, что фильтр Калмана, используемый в данном описании изобретения, включает в себя стандартные фильтры Калмана, а также расширенные и модифицированные фильтры Калмана. Варианты осуществления, описанные в данном документе, могут применяться к любым другим типам фильтров Калмана. Фильтры Калмана имеют две фазы вычисления для каждой эпохи измерений: фаза прогнозирования и фаза обновления. Кроме того, фильтр Калмана, как правило, прогнозирует и обновляет как оцененное состояние устройства или системы, отслеживаемой фильтром Калмана, так и прогнозируемую ковариацию оценки (часто называемую просто ковариацией или ковариацией оценки), представляющую оцененную точность вычисленного состояния.
Фильтр Калмана обычно представляет собой процедуру (или модуль), или набор процедур (или модулей), исполняемых одним или несколькими процессорами. Фильтр Калмана исполняется неоднократно (например, один раз в секунду), причем каждый раз использует новые измерения кода (также называемые измерения псевдодальности) и измерения фазы несущей для обновления состояния фильтра Калмана. Хотя уравнения, используемые фильтрами Калмана, являются сложными, фильтры Калмана широко используются в области навигации, и, поэтому, только те аспекты фильтров Калмана, которые относятся к настоящему изобретению, требуют описания с какой-либо подробностью. Необходимо подчеркнуть, что, хотя фильтры Калмана широко используются в приемниках GPS и других навигационных системах, многие аспекты этих фильтров Калмана меняются от одной реализации к другой. Например, фильтры Калмана, используемые в некоторых приемниках GPS, могут включать в себя состояния, которые не включаются в другие фильтры Калмана, или могут использовать несколько другие уравнения, чем те, которые используются в других фильтрах Калмана.
Пусть наборы спутниковых навигационных измерений, выполненных во временной последовательности, обозначаются как L1, L2, …, Ln, где нижний индекс обозначает момент времени, при котором выполняется спутниковое навигационное измерение, и где каждый набор спутниковых навигационных измерений определяется как вектор измерений. Неизвестные векторы состояния в каждой эпохе измерений обозначаются как X1, X2, …, Xn соответственно.
Зависимость между ожидаемым значением спутниковых навигационных измерений в качестве функции неизвестных параметров состояния может описываться как E(Lk)=F(Xk). Разность между спутниковыми навигационными измерениями и их ожидаемым значением, иногда упоминаемым как невязки до фиксирования, обозначаются как Z. Линейная модель наблюдений, норма которой (т.е. длина) должна минимизироваться, определяется следующим образом:

где Vk представляет собой вектор невязки (т.е. обновление после измерения),  представляет собой параметры вектора состояния перед обновлением измерения, H представляет собой чувствительность спутниковых навигационных измерений к неизвестным параметрам состояния (частные производные f(
представляет собой параметры вектора состояния перед обновлением измерения, H представляет собой чувствительность спутниковых навигационных измерений к неизвестным параметрам состояния (частные производные f( ) в отношении параметров вектора состояния), δ
) в отношении параметров вектора состояния), δ представляет собой коррекцию вектора состояния, которая минимизирует норму вектора невязки.
представляет собой коррекцию вектора состояния, которая минимизирует норму вектора невязки.
При обработке стандартного фильтра Калмана предполагается, что спутниковые навигационные измерения имеют шум ε, который является некоррелированным между эпохами измерений. Дополнительно, также предполагается, что индивидуальные спутниковые навигационные измерения в конкретной эпохе измерений также являются некоррелированными. Отметим, что, когда спутниковые навигационные измерения являются коррелированными, часто является возможным устранение корреляции на этапе предварительной обработки. Ковариационная матрица для данной эпохи измерений определяется диагональной матрицей R:

где ri представляет собой i-ый диагональный элемент ковариационной матрицы R, представляющий ковариацию i-ого спутникового навигационного измерения.
В некоторых видах реализации фильтра Калмана матрица, обратная R, используется вместо R. Матрица, обратная R, также упоминается как весовая матрица W, в которой элементы wi в W представляют собой просто обратные величины индивидуальных элементов R (т.е. wi=1/ri).
Зависимость между последовательной эпохой вектора X1, X2, …, Xn устанавливается статистически как:

где Xk представляет собой неизвестный вектор состояния в эпоху k, ϕk,k-1 представляет собой матрицу (также называемую матрицей переходов), которая связывает Xk-I с Xk, и Uk представляет собой вектор, элементами которого являются последовательность белого шума (т.е. последовательность случайных значений с нулевым средним, которые являются некоррелированными).
Ковариационная матрица, ассоциированная с Uk, как предполагается, известна и обозначается как:

где  представляет собой транспонированную матрицу для Uj, которая является такой же, что и нетранспонированная для Uj, так как Uj является диагональной матрицей.
представляет собой транспонированную матрицу для Uj, которая является такой же, что и нетранспонированная для Uj, так как Uj является диагональной матрицей.
Оценкой фильтра Калмана состояния после k-1 эпох является  с соответствующей ковариацией
с соответствующей ковариацией  . Прогнозируемым состоянием и соответствующей ковариационной матрицей в следующую эпоху k является:
. Прогнозируемым состоянием и соответствующей ковариационной матрицей в следующую эпоху k является:
где:  и
представляют собой оцененные состояния фильтра Калмана и дисперсию соответственно для k-1 эпохи, ϕk,k-1 и Qk представляют собой матрицу переходов состояния и динамическую матрицу фильтра Калмана соответственно между k-1 и k эпохами, и
и
и
представляют собой оцененные состояния фильтра Калмана и дисперсию соответственно для k-1 эпохи, ϕk,k-1 и Qk представляют собой матрицу переходов состояния и динамическую матрицу фильтра Калмана соответственно между k-1 и k эпохами, и
и  представляют собой прогнозируемые состояния фильтра Калмана и дисперсию соответственно для эпохи k. Оцененное состояние фильтра Калмана и дисперсия иногда называются состоянием и дисперсией (или вычисленным состоянием и дисперсией) объекта или системы, состояние которых отслеживается фильтром Калмана.
представляют собой прогнозируемые состояния фильтра Калмана и дисперсию соответственно для эпохи k. Оцененное состояние фильтра Калмана и дисперсия иногда называются состоянием и дисперсией (или вычисленным состоянием и дисперсией) объекта или системы, состояние которых отслеживается фильтром Калмана.
Чтобы обновить результаты, используя вектор измерений в эпоху k (уравнение наблюдения), используются следующие формулы. Матрицей K усиления Калмана является:

Обновлением  измерения вектора (параметра) состояния, также называемым оцененным состоянием фильтра Калмана или вычисленным состоянием объекта или системы, является
измерения вектора (параметра) состояния, также называемым оцененным состоянием фильтра Калмана или вычисленным состоянием объекта или системы, является

Обновлением  измерения ковариационной матрицы, также называемым оцененной ковариацией фильтра Калмана или вычисленной ковариацией объекта или системы, является:
измерения ковариационной матрицы, также называемым оцененной ковариацией фильтра Калмана или вычисленной ковариацией объекта или системы, является:

где I представляет собой единичную матрицу.
Процесс, описанный выше в отношении уравнений (A)-(I), может использоваться для определения состояния множества глобальных навигационных спутников (например, отслеживания орбит спутников), как описано ниже в отношении фиг.4.
Значения неоднозначности двойной разности и ограничения на значения неоднозначности двойной разности
Точное определение орбиты и часов для точности 3-5 сантиметров для глобальных навигационных спутниковых систем (GNSS) требует корректное разрешение неоднозначностей фазы несущей. Так как существуют смещения, зависимые от спутника и приемника, является проблемой разрешение неоднозначностей недифференциальных измерений фазы несущей.
Данный документ описывает новый подход для разрешения неоднозначностей фазы несущей, используя целочисленные неоднозначности двойной разности и применяя ограничение на целочисленные неоднозначности двойной разности при обновлении состояния фильтра Калмана. Состояние фильтра Калмана представляет положения, траектории и значения часов глобальных навигационных спутников 110-1 - 110-N (фиг.1).
Неоднозначности фазы несущей представляют собой неоднозначности в измеренном расстоянии между спутником и приемником. Они часто называются целочисленными неоднозначностями, так как корректное значение неоднозначности представляет собой целое число, которое умножается на применяемую длину волны. Сумма измеренной фазы несущей и значение разрешенной целочисленной неоднозначности, умноженное на применимую длину волны, равна расстоянию между спутником и приемником. Целочисленная неоднозначность измеряется в «циклах», которыми являются значения, такие как дробная разность между плавающими и целочисленными значениями соответствующей целочисленной неоднозначности, и среднеквадратическое отклонение (также называемое сигмой) целочисленной неоднозначности.
Основной наблюдаемой величиной для точного определения орбиты и часов спутника GNSS соответствующего спутника является линейная комбинация (LC) свободная от ионосферного влияния и с нулевой разностью фаз несущих L1/L2, показанных в уравнениях (3) и (4) ниже. Ионосферная задержка первого порядка в исходной наблюдаемой величине устраняется линейной комбинацией фаз несущих двойных частот. Широкополосные неоднозначности могут разрешаться с использованием комбинации Мельбурна-Вюббена, показанной в уравнениях (1) и (2).
Широкополосная неоднозначность может вычисляться для каждого спутника (без различения по спутникам или приемникам), используя уравнение Мельбурна-Вюббена, показанное в уравнении (1). Широкополосная неоднозначность вычисляется посредством вычитания широкополосной фазы из наблюдений узкополосной псевдодальности, как в уравнении (1)

Решение этого уравнения в отношении широкополосной неоднозначности и смещения приводит к уравнению (2)

где P1, P2 представляют собой измерения псевдодальности в метрах на частотах f1, f2 GNSS соответственно;
λ1, λ2 представляют собой длины волн в метрах для частот f1, f2 GNSS соответственно;
Φ1, Φ2 представляют собой измерения фазы несущей в циклах на частотах f1, f2 GNSS соответственно;
c представляет собой скорость света (м/с);
 ,
,  представляют собой целочисленные неоднозначности для спутника i на частотах f1, f2 GNSS соответственно;
представляют собой целочисленные неоднозначности для спутника i на частотах f1, f2 GNSS соответственно;
 представляет собой широкополосное смещение в циклах, которое зависит как от спутника, так и от приемника.
представляет собой широкополосное смещение в циклах, которое зависит как от спутника, так и от приемника.
 =
= -
- представляет собой широкополосную неоднозначность в циклах для спутника i
представляет собой широкополосную неоднозначность в циклах для спутника i
Линейная комбинация свободная от ионосферной рефракции без разности
Линейная комбинация свободная от ионосферной рефракции без разности измерений фазы несущей L1/L2 может быть выражена так, как представлено в уравнении (3):

где:
ρ представляет собой геометрическое расстояние между фазовым центром спутника и фазовым центром со скорректированной рефракцией приемника, включающее в себя спутниковую орбитальную ошибку, перемещение приемника и т.д.;
τr представляет собой ошибку часов приемника;
τi представляет собой ошибку часов спутника;
T представляет собой тропосферную задержку (м); и
 представляет собой смещение фазы несущей, измеренное в метрах, линейной комбинации свободной от ионосферной рефракции целочисленных неоднозначностей для двух сигналов, имеющих разные длины волны (например, L1 и L2) от одного и тоже спутника.
представляет собой смещение фазы несущей, измеренное в метрах, линейной комбинации свободной от ионосферной рефракции целочисленных неоднозначностей для двух сигналов, имеющих разные длины волны (например, L1 и L2) от одного и тоже спутника.
Этот член неоднозначности может принимать несколько видов, как показано в уравнении (4):

где:
 представляет собой узкополосную длину волны, обычно имеющую значение приблизительно 10,7 см;
представляет собой узкополосную длину волны, обычно имеющую значение приблизительно 10,7 см;
 представляет собой широкополосную длину волны, обычно имеющую значение приблизительно 86,4 см;
представляет собой широкополосную длину волны, обычно имеющую значение приблизительно 86,4 см;
 представляет собой объединенную узкополосную неоднозначность; и
представляет собой объединенную узкополосную неоднозначность; и
 представляет собой широкополосную неоднозначность.
представляет собой широкополосную неоднозначность.
Неоднозначности могут разрешаться за два этапа. Первым этапом является разрешение широкополосной неоднозначности, используя уравнения (1) и (2). Подробности описываются ниже («Разрешение широкополосной неоднозначности одинарной разности»). Вторым этапом является разрешение узкополосной неоднозначности. Она вычисляется посредством вставки разрешенной целочисленной широкополосной неоднозначности в уравнение (4). Этой узкополосной неоднозначностью, которая разрешается на втором этапе, может быть значение целочисленной неоднозначности, ассоциированное или с частотой L1 или с частотой L2, или с узкополосной комбинацией частот как L1, так и L2. Фактическая длина волны узкополосной неоднозначности составляет около 10,7 см, независимо от того, какая из узкополосных неоднозначностей разрешена. Эта узкополосная длина волны легко вычисляется для неоднозначности или L1, или L2, используя уравнение (4). Если используется узкополосная комбинация частот как L1, так и L2, явная длина волны неоднозначности составляет только половину от большой. Однако, так как объединенная узкополосная неоднозначность имеет такие же нечетно-четные целочисленные характеристики, что и широкополосная неоднозначность, результатом является такая же фактическая длина волны (10,7 см) для объединенной узкополосной из-за нечетно-четного ограничения.
Разрешение широкополосной неоднозначности одинарной разности
Член  широкополосного дробного смещения, который появляется в уравнениях (1) и (2), называется широкополосным смещением (в циклах) и зависит как от спутника, так и от приемника. Посредством формирования одинарной разности уравнения (2) между двумя спутниками из одного и того же созвездия (например, GPS, ГЛОНАСС или Галилео) в одном местонахождении приемника, можно свести на нет зависимую от приемника составляющую широкополосного смещения. Оставшаяся часть широкополосного смещения содержит широкополосное смещение одинарной разности между спутниками.
широкополосного дробного смещения, который появляется в уравнениях (1) и (2), называется широкополосным смещением (в циклах) и зависит как от спутника, так и от приемника. Посредством формирования одинарной разности уравнения (2) между двумя спутниками из одного и того же созвездия (например, GPS, ГЛОНАСС или Галилео) в одном местонахождении приемника, можно свести на нет зависимую от приемника составляющую широкополосного смещения. Оставшаяся часть широкополосного смещения содержит широкополосное смещение одинарной разности между спутниками.
Существует два варианта для вычисления широкополосных дробных смещений. Они могут или вычисляться предварительно для каждого дня в пакетном режиме, или они могут оцениваться в реальном времени для каждой эпохи во время процесса разрешения широкополосной неоднозначности. Последний вариант является обычно предпочтительным, так как он может выполняться одновременно, когда разрешаются широкополосные неоднозначности одинарной разности.
Вычисление широкополосного смещения спутника
Подход с фильтром Калмана используется для оценки всех смещений спутника для разрешения широкополосной неоднозначности. Требуется одно состояние смещения для каждого спутника. Одинарная разность уравнений (1) и (2) между спутниками используется для оценки каждого смещения спутника во время процесса разрешения широкополосной неоднозначности. Процедура вычисления включает в себя следующие этапы:
1. Инициализировать фильтр Калмана, используя большую дисперсию (например, 0,5 цикла в квадрате) и нуль для состояния фильтра каждого широкополосного смещения спутника в созвездии (например, GPS, ГЛОНАСС или Галилео) навигационных спутников. Если отслеживаются спутники из многочисленных созвездий, инициализировать состояние фильтра каждого широкополосного смещения спутника в каждом созвездии.
2. В каждой эпохе вычислить член CMC (код минус несущая) (т.е. узкополосное измерение кода минус широкополосное измерение фазы несущей), как указано в уравнениях (1) и (2), используя каждое из измерений кода и фазы несущей на каждом местонахождении.
3. Выровнять член CMC, используя фильтр нижних частот и возвратить фильтр в исходное состояние, если обнаруживается срыв цикла несущей или большое изменение значения.
4. Выбрать опорный спутник с высоким углом возвышения для каждого местонахождения и каждого созвездия.
5. Сформировать одинарную разность каждого выровненного CMC посредством вычитания из каждого выровненного значения CMC для выбранного опорного спутника.
6. Округлить значение CMC одинарной разности для каждого спутника.
7. Обновить каждое состояние смещения и дисперсионную матрицу, используя измерения дробной CMC разности (т.е. величину округления) для каждого местонахождения.
8. Применить ограничение нулевого среднего всех смещений спутника для каждого созвездия в качестве дополнительных виртуальных измерений в фильтре Калмана для смещений широкополосной неоднозначности.
9. Выполнить обновление времени фильтра Калмана для широкополосных смещений спутника после завершения обновления измерений дробного CMC для всех местонахождений.
10. В каждой эпохе повторить этапы 2-9.
Модуль вычисления смещения в реальном времени разработан и реализован, чтобы автоматически вычислять широкополосные смещения спутника с конкретным интервалом обновления смещения. Широкополосное смещение спутника отмечается готовым для использования после того, как будут обработаны данные для заданного периода времени (например, 4-6 часов). При некоторых обстоятельствах, таких как, когда все навигационные спутники функционируют надлежащим образом, все широкополосные смещения рассматриваются как готовые для использования, после того как будет активным фильтр Калмана (например, с последнего раза, когда он был перезапущен или инициализирован) в течение по меньшей мере шести часов. Когда смещения спутника из оценки фильтра Калмана в реальном времени будут готовы, начинается процесс разрешения широкополосной целочисленной неоднозначности.
Разрешение широкополосной неоднозначности одинарной разности
Процесс разрешения широкополосной неоднозначности одинарной разности состоит из нескольких этапов реального времени, которые включают в себя; 1) выбор опорного спутника и логики переключения, 2) вычисление широкополосных неоднозначностей одинарной разности и ассоциированной статистики, 3) проверку достоверности неоднозначности и восстановление некорректного фиксирования и 4) оценку широкополосного смещения спутника.
Вычисление широкополосных неоднозначностей одинарной разности для каждого спутника на каждом местонахождении (т.е. на каждой опорной станции) и ассоциированной статистики включает в себя:
вычисление значения CMC (узкополосного кода минус широкополосной несущей) и его дисперсии в качестве функции угла возвышения и времени выравнивания;
выполнение обновления измерения фильтра Калмана плавающей неоднозначности (WL_float) и ее значения сигмы (WL_float_sigma);
вычитание дробного широкополосного смещения (WL_bias) из плавающей неоднозначности (WL_float) и округление до ближайшего целого в качестве потенциального фиксированного целочисленного значения;
вычисление невязки посредством вычитания широкополосного (WL) смещения и целого числа из плавающей неоднозначности; и
выполнение обновления фильтра Калмана невязки неоднозначности (WL_res) и ее сигмы (WL_res_sigma).
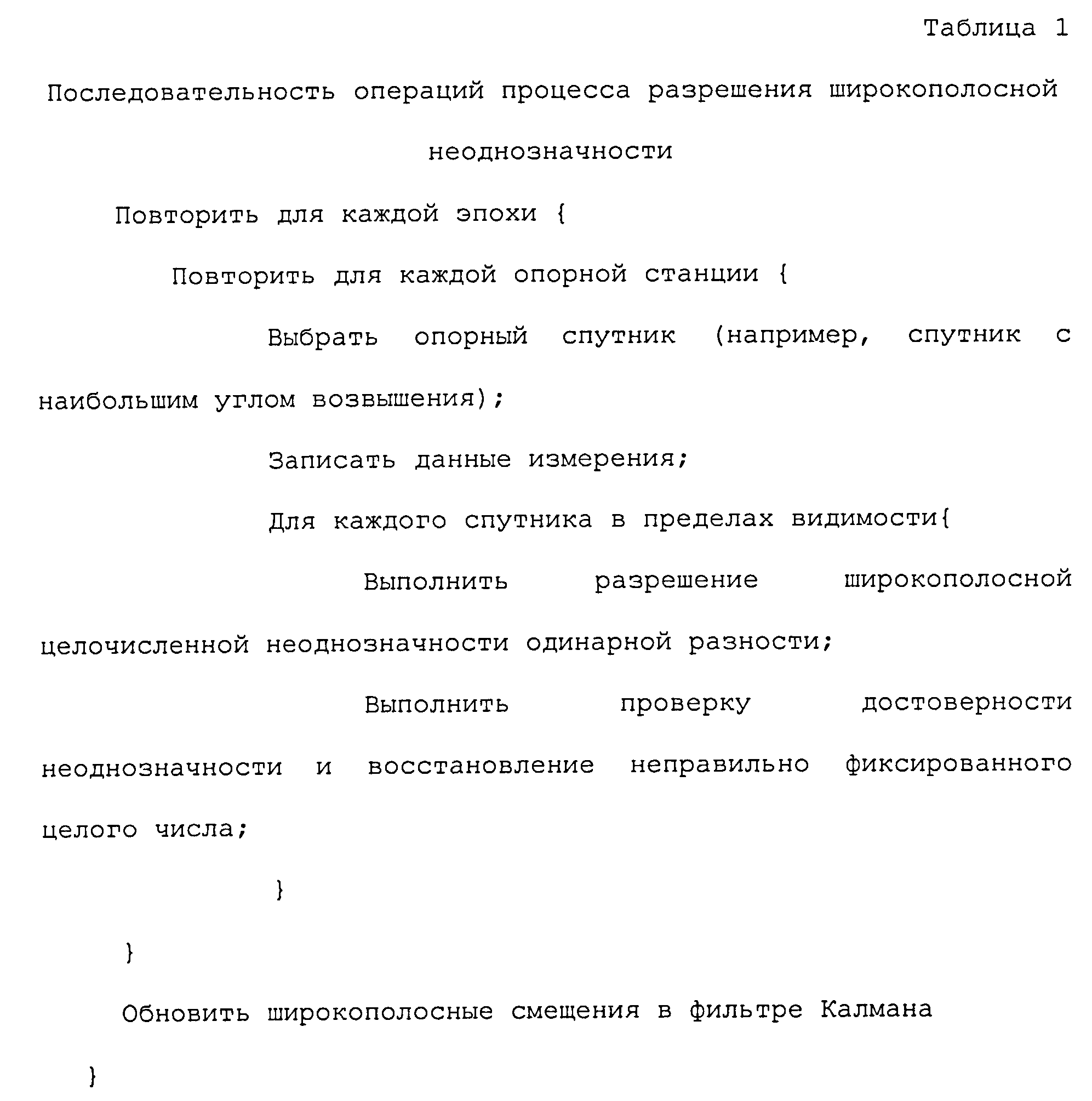
В некоторых вариантах осуществления процедура проверки достоверности неоднозначности и восстановления неправильного фиксированного целого числа выполняется следующим образом. Неоднозначность разрешается или неудачно завершается (WL_fix), когда выполняются следующие критерии:
Дисперсия плавающей неоднозначности (WL_float_sigma) должна быть в пределах заданного порога (т.е. 0,1 цикла);
при данном доверительном уровне (например, 99,7%) невязка (WL_res) должна находиться в пределах ассоциированного кратного (например, 3) одного значения сигмы плавающей неоднозначности (WL_float_sigma), определенного нормальным распределением (например, невязка WL_res должна быть менее 3, умноженной на WL_float_sigma); и
среднеквадратическое отклонение (иногда называемое сигмой) невязки (WL_res_sigma) должно быть в пределах порогового значения (например, 0,25 цикла).
Фиксирования неоднозначности (в пределах скользящего окна временного интервала) идентифицируются как неправильно фиксированные на целое число, если среднеквадратическое отклонение невязок (в пределах скользящего окна) превышает пороговое значение (например, 0,25 цикла).
Когда определяется, что не выполняется критерий фиксирования WL, флаг WL_fix устанавливается на (wrong_fix), и восстанавливается широкополосная неоднозначность в качестве плавающего значения.
Представление псевдокода процесса разрешения широкополосной неоднозначности показано в таблице 1 ниже.
Разрешение узкополосной неоднозначности двойной разности (DD)
Когда существуют смещения, зависимые как от спутника, так и от приемника, узкополосная неоднозначность не является целым числом. Однако узкополосная неоднозначность двойной разности (DD) между приемником и спутником имеет целочисленную характеристику (т.е. имеет целочисленное значение), после того как будут введены в уравнение (4) фиксированные широкополосные неоднозначности одинарной разности.
Принцип целочисленного ограничения неоднозначности DD
Показанные ниже уравнения используются для описания того, как единственное целочисленное ограничение неоднозначности двойной разности (DD) реализуется в фильтре Калмана (который используется для определения орбитального состояния множества спутников). Дополнительные независимые ограничения неоднозначности могут быть реализованы во время одной и той же эпохи обработки фильтром Калмана или в разные эпохи. Не происходит потеря общности отбрасыванием нижних индексов в уравнении (4) для заданной предполагаемой узкой полосы или узкополосной комбинации и, вместо этого, использованием нижнего индекса для указания рассматриваемого конкретного приемника (т.е. опорной станции). Таким образом, узкополосные неоднозначности в уравнении (4) для двух конкретных приемников могут указываться нижними индексами A и B. Таким образом, узкополосные плавающие неоднозначности могут указываться посредством  ,
,  ,
,  ,
,  для двух приемников в уравнении (4) и их дисперсии и ковариации
для двух приемников в уравнении (4) и их дисперсии и ковариации  для спутников i, j и опорных станций A, B соответственно. Эти значения легко могут быть получены из вектора состояния фильтра Калмана и дисперсионно-ковариационной матрицы после обновления измерения фильтра Калмана. Вычисление плавающей неоднозначности DD
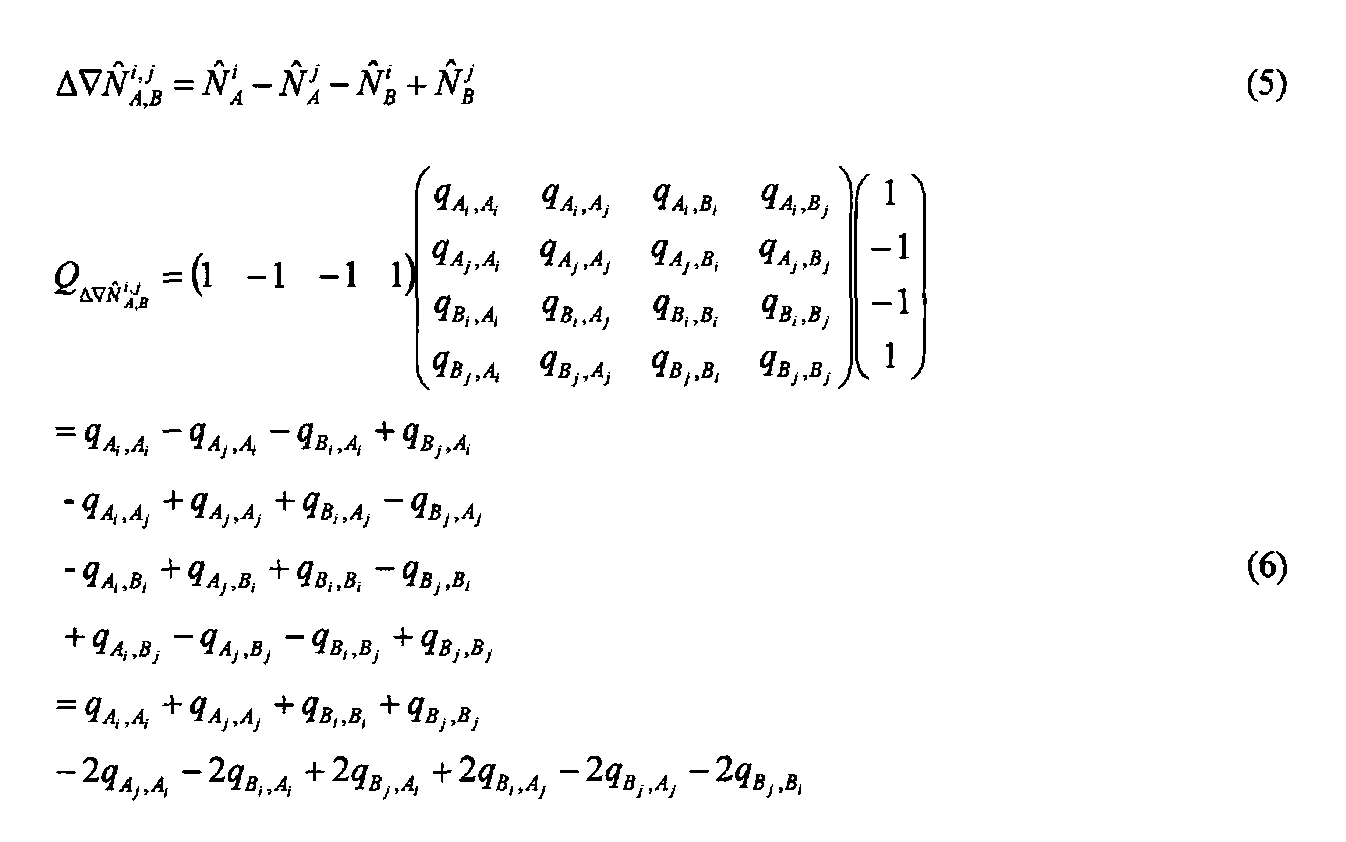
для спутников i, j и опорных станций A, B соответственно. Эти значения легко могут быть получены из вектора состояния фильтра Калмана и дисперсионно-ковариационной матрицы после обновления измерения фильтра Калмана. Вычисление плавающей неоднозначности DD  и дисперсии
и дисперсии  выполняют с использованием уравнений (5) и (6).
выполняют с использованием уравнений (5) и (6).
Установка флага для указания успешного разрешения неоднозначности должна выполняться на основе ряда факторов. Вероятность успеха, среди других факторов, является функцией выбранных порогов. Она также является функцией времени фильтрации (которое должно быть максимально коротким, чтобы не вызывать чрезмерную скорость некорректного разрешения неоднозначности). Конечная вероятность успеха сильно зависит от порогов, выбранных 1) для допустимой доли невязки, посредством которой плавающая неоднозначность отличается от целочисленного значения, 2) допустимого значения сигмы плавающей неоднозначности и минимального времени фильтрации. Вероятность успешного разрешения неоднозначности может быть получена теоретически как функция без побочного эффекта плавающей неоднозначности и ее дисперсии, которые являются функцией времени фильтрации. Необходимо отметить, что могут появляться избыточные пары неоднозначностей, так как пары неоднозначностей спутников или местонахождений могут формировать цепочки звеньев, которые могут стать избыточными. Должно исключаться фиксирование избыточных пар неоднозначностей. Легко определить, является ли или нет полученная плавающая неоднозначность DD уже целочисленной, так как ее вычисленная дисперсия будет равна нулю, предполагая, что нет ошибки численного расчета. На практике, может использоваться очень малое значение эпсилон в качестве проверки, что дисперсия очень близка к нулю.
Если принимается решение, что  может быть зафиксировано на
может быть зафиксировано на  =roundoff(
=roundoff( ), где roundoff(x) равна целому числу, ближайшему по значению к x, тогда ограничение целочисленной неоднозначности DD вводится в состояние фильтра Калмана и дисперсионную матрицу.
), где roundoff(x) равна целому числу, ближайшему по значению к x, тогда ограничение целочисленной неоднозначности DD вводится в состояние фильтра Калмана и дисперсионную матрицу.
Это выполняется посредством ввода виртуальных измерений с ассоциированной дисперсионно-ковариационной матрицей в фильтр Калмана. Многочисленные плавающие и/или фиксированные ограничения могут налагаться в этом же виртуальном измерении. Вектор состояния и ассоциированная дисперсионно-ковариационная матрица для индивидуальных неоднозначностей представляют собой те, которые показаны в уравнении (7).
Конкретное новое ограничение, налагаемое на фильтр Калмана, заставляющее плавающую неоднозначность  двойной разности стать целочисленной (или почти целочисленной) равно:
двойной разности стать целочисленной (или почти целочисленной) равно:

В уравнении (8) δX представляет собой вектор коррекции состояния, появляющийся из наложения целочисленного ограничения DD. Другими словами, δX представляет собой обновление состояния, соответствующее одному ограничению целочисленной неоднозначности двойной разности, используемому фильтром Калмана. Значение W в уравнении (8) упоминается как невязка и определяется как разность между округленным значением плавающей неоднозначности двойной разности минус неокругленное значение  . Конкретно, W вычисляется так, как приведено в уравнении (9).
. Конкретно, W вычисляется так, как приведено в уравнении (9).

Альтернативно, невязка W может определяться как W= -
- , которая представляет собой разность фиксированной целочисленной неоднозначности и плавающей неоднозначности.
, которая представляет собой разность фиксированной целочисленной неоднозначности и плавающей неоднозначности.
Учитывая уравнения (7) и (8), следующее уравнение наблюдения для виртуальных измерений может быть записано как уравнение (10).

где P называется весовой матрицей, обратной дисперсионно-ковариационной матрице; V представляет собой невязку после подгонки; T представляет собой транспонированный оператор, и K представляет собой связанный сингулярный коэффициент (определенный ниже), если только единственная целочисленная неоднозначность DD вводится во время одной итерации обновления фильтра Калмана, и представляет собой вектор, если многочисленные неоднозначности DD вводятся в одной и той же итерации обновления фильтра Калмана. Общее решение методом наименьших квадратов уравнения (10), учитывающее ограничение неоднозначности двойной разности, разработано для минимизации VTPV, представленного уравнением (11).

Принятие во внимание уравнения (8) и подстановка уравнения (10) в уравнение (11) дает следующие уравнения (12) и (13):

Так как P представляет собой матрицу полного ранга, уравнение (12) может быть переписано как уравнение (14).

Подстановка уравнения (14) в уравнение (13) дает уравнение (15):

Подстановка уравнения (15) в уравнение (12) дает следующее:
где  =
= , которое легко может быть проверено (например, см. уравнение (6) выше), и M представляет собой ковариационную матрицу двойной разности, определенную в уравнении (17).
, которое легко может быть проверено (например, см. уравнение (6) выше), и M представляет собой ковариационную матрицу двойной разности, определенную в уравнении (17).
Основываясь на уравнениях (12) и (13), может быть показано, что дисперсионная матрица для K и δX равна  .
.
Посредством использования формул обращения подматриц, дисперсия оцененного вектора состояния после введения ограничения целочисленной неоднозначности DD может быть получена как уравнение (18)

Основываясь на вышеупомянутом, существующий фильтр Калмана может быть модифицирован посредством использования уравнений (16) и (18) для введения ограничения неоднозначности DD в вычисление обновления фильтра. После того как состояние фильтра Калмана будет обновлено в соответствии с уравнениями (16) и (18), невязка (W=
- ) между плавающей неоднозначностью и фиксированной целочисленной неоднозначностью или равна 0 или близка к нулю (определенная здесь со значением, что невязка была уменьшена по величине до менее заданного порогового значения, такого как 0,05 циклов). Необходимо отметить, что оценка всех параметров состояния улучшается после применения одного или нескольких ограничений неоднозначности DD.
) между плавающей неоднозначностью и фиксированной целочисленной неоднозначностью или равна 0 или близка к нулю (определенная здесь со значением, что невязка была уменьшена по величине до менее заданного порогового значения, такого как 0,05 циклов). Необходимо отметить, что оценка всех параметров состояния улучшается после применения одного или нескольких ограничений неоднозначности DD.
После применения ограничения целочисленной неоднозначности DD могут быть получены коррекции состояния для узкополосных неоднозначностей  ,
,  ,
,  и
и  , как показано в уравнениях (19)-(22).
, как показано в уравнениях (19)-(22).
Это обновление решения удовлетворяет уравнениям (8) или (9) ограничения.
Дополнительные формулы для фиксирования многочисленных узкополосных неоднозначностей в один и тот же момент времени и эпоху приведены в уравнениях (23) и (24).

где C представляет собой матрицу размера m×n;
m представляет собой количество узкополосных неоднозначностей, подлежащих фиксации;
n представляет собой количество состояний в векторе состояния фильтра Калмана.
Ограничение, чтобы узкополосные неоднозначности были точными целыми числами, могут ослабляться для учета малых системных ошибок. Уравнения (25) и (26) являются модификациями уравнений (23) и (24), разрешающие малые отклонения от целых чисел для узкополосных неоднозначностей.

где R представляет собой диагональную матрицу априорной точности (дисперсии) узкополосных целочисленных неоднозначностей DD, и C представляет собой матрицу размера m×n.
Выбор наборов независимых целочисленных неоднозначностей двойной разности
Ниже описываются два подхода, которые могут использоваться для выбора наборов независимых целочисленных неоднозначностей двойной разности. Первый подход, описанный более подробно ниже, представляет собой использование независимых базовых линий. Каждая базовая линия соответствует паре опорных станций; термин «базовая линия» ссылается на «линию» между местоположениями двух опорных станций. В наборе независимых базовых линий ни одна из базовых линий не может быть воспроизведена посредством образования линейной комбинации других базовых линий в наборе. Для каждой базовой линии спутник с наибольшим средним углом возвышения выбирается в качестве опорного спутника. Из определенных независимых базовых линий и опорных спутников может быть определен набор, содержащий все независимые целочисленные неоднозначности двойной разности. Второй подход, также описанный более подробно ниже, представляет собой формирование всех возможных комбинаций целочисленных неоднозначностей двойной разности из всех возможных базовых линий. Отметим, что игнорируется любая целочисленная неоднозначность двойной разности, связанная с общим интервалом данных, который короче пяти-пятнадцати минут, так как, как правило, трудно разрешить неоднозначности по таким коротким интервалам фильтрации.
Подход независимых базовых линий
Для данной глобальной сети приемников GNSS (например, опорных станций 140, фиг.1), могут быть образованы многочисленные разные комбинации независимых базовых линий (т.е. базовых линий между парами опорных станций). Теория графов может использоваться для формирования наилучших комбинаций независимых базовых линий. При заданном связном неориентированном графе остовным деревом этого графа является подграф, который представляет собой дерево и связывает вместе все вершины (опорные приемники). Любая базовая линия, которая вызывает охват области, не является независимой базовой линией. Одиночный граф может иметь многочисленные разные остовные деревья, соединяющие вместе приемники. Также можно назначить вес или стоимость каждому ребру (базовой линии), которые представляют собой число, представляющее, насколько неблагоприятным оно является, и использовать его для назначения веса остовному дереву посредством вычисления суммы весов ребер в этом остовном дереве. Минимальным остовным деревом или остовным деревом с минимальным весом тогда является остовное дерево с весом, которое меньше или равно весу каждого другого остовного дерева. В общих чертах, любой неориентированный граф (необязательно связной) имеет минимальный остовной лес, который представляет собой объединение минимальных остовных деревьев для их связных компонентов.
Если каждое ребро имеет отличающийся вес, тогда будет только одно, уникальное минимальное остовное дерево. Алгоритм Прима представляет собой алгоритм в теории графов, который находит минимальное остовное дерево для связного взвешенного графа. Это означает, что он находит поднабор ребер (базовых линий), которые формируют дерево, которое включает в себя каждую вершину, где минимизируется общий вес всех ребер в дереве. Алгоритм был открыт в 1930 г. математиком Войтехом Ярником и позже независимо ученым, работающим в области теории вычислительных машин и систем, Робертом К. Примом в 1957 г. и вновь открыт Эдсгером Дейкстром в 1959 г. Поэтому, он иногда называется алгоритмом DJP, алгоритмом Ярника или алгоритмом Прима-Ярника.
Алгоритм непрерывно увеличивает размер дерева, начиная с одной вершины, до тех пор, пока он не будет охватывать все вершины. Необходимо отметить, что время вычисления равно O(V2). V представляет собой количество вершин (опорных местонахождений), и нотация «большого О» используется в теории вычислительной сложности для описания того, как размер вводимых данных оказывает влияние на использование алгоритма вычислительных ресурсов (обычно время прогона или память).
Подход всех возможных базовых линий
Теоретически, любой набор с максимальным количеством независимых неоднозначностей DD может быть выражен как линейная комбинация других, и они статистически эквивалентны друг другу, если рассматриваются как оценки, так и их полная ковариационная матрица. Для системы с около шестьюдесятью опорными станциями и тридцатью глобальными навигационными спутниками, с около 500-700 независимыми неоднозначностями DD, только оценки и их дисперсия используются для принятия решения о фиксировании неоднозначности. Это потому, что является трудоемким принятие во внимание корреляционной части. Разные выборы неоднозначностей DD приводят к неоднозначностям с разными сдвигами до ближайшего целого числа и разными дисперсиями, и, следовательно, к разным эффективностям при фиксировании неоднозначностей. В принципе, независимые неоднозначности DD выбираются начиная с наиболее доверительной из всех возможных неоднозначностей. Неоднозначности, зависимые от фиксированных неоднозначностей DD легко могут удалены из списка, подлежащего фиксированию, посредством проверки на нулевые дробные неоднозначности DD и нулевую (или очень близкую к нулю) дисперсию. После того как будут определены независимые базовые линии или все возможные базовые линии, спутник с наибольшим средним углом возвышения может быть выбран в качестве опорного спутника. Может быть сохранена информация о независимых или всех возможных неоднозначностях DD, такая как базовое местонахождение, местонахождение ровера, спутник и опорный спутник, плавающие неоднозначности и их дисперсия.
Стратегия разрешения целочисленной неоднозначности DD
W-отношение для конкретной базовой линии и его значение оцененной целочисленной неоднозначности двойной разности, основанное на уравнениях (7) и (8), может быть вычислено, как показано в уравнении (27)

где σ0 представляет собой квадратный корень единичной дисперсии, знаменатель представляет собой (или, альтернативно, соответствует) среднеквадратическое отклонение оцененной целочисленной неоднозначности двойной разности (который такой же, что и квадратный корень дисперсии оцененной целочисленной неоднозначности двойной разности), квадратные скобки в числителе представляют функцию roundoff(x), и абсолютное значение в числителе соответствует разности между целочисленными и плавающими версиями значения оцененной целочисленной неоднозначности двойной разности. Дополнительную информацию о W-отношении можно найти в (1) J. Wang, M.P. Stewart & M. Tsakiri, “A discrimination test procedure for ambiguity resolution on the fly,” Journal of Geodesy, 72(11), 644-653 (1998); и (2) L. Dai, J. Wang, C. Rizos, & S. Han, “Predicting atmospheric biases for real-time ambiguity resolution in GPS/GLONASS reference station networks,” Journal of Geodesy, 76, 617-628 (2003).
На практике, σ0 (в уравнении (27)) или может рассматриваться равной 1, или может вычисляться с использованием невязок после подгонки как  , где V представляет собой невязки после подгонки; n-t представляет собой количество степеней свободы, и P представляет собой весовую матрицу измерений (не следует путать с ковариационной матрицей фильтра Калмана).
, где V представляет собой невязки после подгонки; n-t представляет собой количество степеней свободы, и P представляет собой весовую матрицу измерений (не следует путать с ковариационной матрицей фильтра Калмана).
В теории, W-отношение должно удовлетворять нормализованному «распределению Стьюдента». W-отношения независимых неоднозначностей, или всех возможных целочисленных неоднозначностей двойной разности, могут сортироваться в убывающем порядке. Независимые целочисленные неоднозначности двойной разности могут фиксироваться посредством применения уравнений (16) и (18), если удовлетворяются условия в уравнениях (28)-(30).

где a, b и c представляют собой установки пороговой величины, установленной эмпирическим путем. Например, в некоторых вариантах осуществления a имеет значение между 0,1 и 0,25 цикла, b имеет значение между 0,03 и 0,1 цикла, и c имеет значение 3 (эквивалентно 99,9%) или выше. Эти пороговые параметры могут быть настроены для оптимизации процесса разрешения неоднозначностей, основанного на больших наборах данных.
После того как одна или несколько целочисленных неоднозначностей двойной разности будут фиксированы как целые числа, т.е. после того как будут применены одно или несколько ограничений, все нефиксированные целочисленные неоднозначности двойной разности и дисперсии из наборов независимых нефиксированных неоднозначностей повторно вычисляются и сортируются снова. Процесс разрешения неоднозначностей останавливается, когда больше нет никакой целочисленной неоднозначности двойной разности, которая еще не была фиксирована (т.е. посредством применения соответствующего ограничения к вычислениям обновления фильтра Калмана), и которая удовлетворяет уравнениям (28)-(30).
Процедура разрешения неоднозначностей DD
Здесь описываются два альтернативных способа или процесса для разрешения узкополосных неоднозначностей. Эти способы или процессы называются в данном документе процессом (или процедурой) разрешения целочисленной неоднозначности независимых базовых линий и процессом (или процедурой) разрешения целочисленной неоднозначности всех базовых линий. Эти два процесса (или процедуры) описываются ниже с ссылкой на фиг.5A-5B и фиг.6A-6B. Процесс, описываемый блок-схемой последовательности операций на фиг.6A-6B, соответствует, или заменяет, операции 522 и 524 на фиг.5A.
Процедура разрешения целочисленной неоднозначности независимых базовых линий
1. Определить набор независимых базовых линий (520, фиг.5). В некоторых вариантах осуществления это выполняется с использованием алгоритма Прима. Количество независимых базовых линий равно количеству опорных станций (местонахождений) минус 1. В некоторых вариантах осуществления независимые базовые линии являются математически независимыми, означая, что никакая базовая линия в наборе не может быть определена как линейная комбинация других базовых линий в наборе.
2. Для каждой базовой линии определить опорный спутник с наибольшим средним углом возвышения и вычислить плавающие и целочисленные значения для соответствующей целочисленной неоднозначности двойной разности (520, фиг.5).
3. Для каждой базовой линии сохранить следующую информацию: две опорные станции на концах базовой линии, идентификации спутников, идентификацию опорного спутника, целочисленную неоднозначность двойной разности, дисперсию для целочисленной неоднозначности двойной разности и W-отношение. Также сформировать «список подлежащих фиксированию DD» или массив (см. 602, фиг.6A). Любая целочисленная неоднозначность двойной разности, связанная с интервалом фильтрации данных, который короче заданного интервала, обычно пять-пятнадцать минут, игнорируется (т.е. не включается в список подлежащих фиксированию DD). Любая целочисленная неоднозначность двойной разности, которая соответствует нефиксированной широкополосной неоднозначности, игнорируется (т.е. не включается в список подлежащих фиксированию DD). Все другие целочисленные неоднозначности двойной разности (соответствующие набору независимых базовых линий, исключая игнорируемые) добавляются в список подлежащих фиксированию DD.
4. Выбрать целочисленную неоднозначность двойной разности из списка подлежащих фиксированию DD, которая (A) имеет максимальное W-отношение, и также (B) удовлетворяет условным уравнениям (28)-(30) (см. 604, фиг.6A). Если более одной целочисленной неоднозначности двойной разности имеют максимальное значение W-отношения, выбрать группу целочисленных неоднозначностей двойной разности с максимальным W-отношением, которое также удовлетворяет условным уравнениям (28)-(30); выбранная группа называется «наилучшей группой» целочисленных неоднозначностей двойной разности. Если имеется по меньшей мере одна выбранная целочисленная неоднозначность двойной разности в списке подлежащих фиксированию DD, которая удовлетворяет условным уравнениям (28)-(30), приступить к этапу 5; если ни одна из целочисленных неоднозначностей двойной разности, оставшихся в списке подлежащих фиксированию DD, не удовлетворяет условным уравнениям, перейти на этап 8 (процесс разрешения неоднозначности завершается по меньшей мере для текущей эпохи).
Этап 4 может быть реализован посредством упорядочения целочисленных неоднозначностей двойной разности в списке подлежащих фиксированию DD в соответствии с их значениями W-отношения с наибольшего W-отношения к наименьшему, таким образом получая упорядоченный список (см. 602, фиг.6A). Начиная с целочисленной неоднозначности двойной разности или неоднозначностей, имеющих наибольшее значение W-отношения (604, фиг.6A), тестировать каждую целочисленную неоднозначность двойной разности в упорядоченном списке до тех пор, или (1) пока не будет достигнут конец списка без выбора каких-либо целочисленных неоднозначностей двойной разности (616-да, фиг.6A), в этом случае процесс переходит на этап 9, или (2) пока не будет достигнута обнаруженной целочисленная неоднозначность двойной разности, которая удовлетворяет условным уравнениям (28)-(30) (608-да, фиг.6A). В последнем случае, выбрать идентифицированную целочисленную неоднозначность двойной разности и также выбрать любые другие целочисленные неоднозначности двойной разности, имеющие такое же W-отношение, которое также удовлетворяет условным уравнениям (28)-(30) (604, 606, фиг.6A). Перейти на этап 5 для обработки одной или нескольких выбранных целочисленных неоднозначностей двойной разности.
5. Модифицировать уравнения обновления фильтра Калмана и также уточнить состояние фильтра Калмана применением одного или нескольких выбранных ограничений целочисленной неоднозначности двойной разности (610, фиг.6A). Если имеется только одна выбранная целочисленная неоднозначность двойной разности, модифицировать уравнения обновления фильтра Калмана при помощи уравнений (16) и (18) ограничения DD для выбранной единственной целочисленной неоднозначности двойной разности. Если были выбраны две или более целочисленные неоднозначности двойной разности, модифицировать уравнения обновления фильтра Калмана при помощи уравнений (23) и (24) ограничения DD для наилучшей группы целочисленных неоднозначностей двойной разности. Одна или несколько выбранных целочисленных неоднозначностей двойной разности теперь представляют собой «фиксированные» целочисленные неоднозначности двойной разности (см. 610, фиг.6A).
6. Удалить одну или несколько фиксированных целочисленных неоднозначностей двойной разности из списка подлежащих фиксированию DD (см. 612, фиг.6A).
7. Повторно вычислить неоднозначности DD, дисперсию и W-отношение для оставшихся целочисленных неоднозначностей двойной разности в списке подлежащих фиксированию DD (см. 614, фиг.6A). Если список подлежащих фиксированию DD не является пустым (616-нет), продолжить обработку на этапе 4.
8. Разрешение неоднозначности останавливается (622, фиг.6A).
Процедура разрешения целочисленной неоднозначности всех возможных базовых линий
1. Определить набор «всех возможных базовых линий» (520, фиг.5). Необязательно используется ограничение на максимальную длину базовой линии (например, базовые линии длиннее 6000 км исключаются из набора возможных базовых линий) для уменьшения необязательных базовых линий.
2. Для каждой базовой линии определить опорный спутник с наибольшим средним углом возвышения и вычислить плавающие и целочисленные значения для соответствующей целочисленной неоднозначности двойной разности (520, фиг.5).
3. Для каждой базовой линии сохранить следующую информацию: две опорные станции на концах базовой линии, идентификации спутников, идентификацию опорного спутника, целочисленную неоднозначность двойной разности, дисперсию для целочисленной неоднозначности двойной разности и W-отношение. Также сформировать «список подлежащих фиксированию DD» или массив (см. 602, фиг.6A). Любая целочисленная неоднозначность двойной разности, связанная с интервалом фильтрации данных, который короче заданного интервала, обычно пять-пятнадцать минут, игнорируется (т.е. не включается в список подлежащих фиксированию DD). Любая целочисленная неоднозначность двойной разности, которая соответствует нефиксированной широкополосной неоднозначности, игнорируется (т.е. не включается в список подлежащих фиксированию DD). Все другие целочисленные неоднозначности двойной разности (соответствующие набору базовых линий, исключая игнорируемые) добавляются в список подлежащих фиксированию DD.
4. Выбрать целочисленную неоднозначность двойной разности из списка подлежащих фиксированию DD, которая (A) имеет максимальное W-отношение, и также (B) удовлетворяет условным уравнениям (28)-(30) (см. 604, фиг.6A). Если более одной целочисленной неоднозначности двойной разности имеют максимальное значение W-отношения, выбрать группу целочисленных неоднозначностей двойной разности с максимальным W-отношением, которые также удовлетворяет условным уравнениям (28)-(30); выбранная группа называется «наилучшей группой» целочисленных неоднозначностей двойной разности. Если имеется по меньшей мере одна выбранная целочисленная неоднозначность двойной разности в списке подлежащих фиксированию DD, которая удовлетворяет условным уравнениям (28)-(30), приступить к этапу 5; если ни одна из целочисленных неоднозначностей двойной разности, оставшихся в списке подлежащих фиксированию DD, не удовлетворяет условным уравнениям, перейти на этап 9 (процесс разрешения неоднозначности завершается по меньшей мере для текущей эпохи).
Этап 4 может быть реализован посредством упорядочения целочисленных неоднозначностей двойной разности в списке подлежащих фиксированию DD в соответствии с их значениями W-отношения с наибольшего W-отношения к наименьшему, таким образом получая упорядоченный список (см. 602, фиг.6A). Начиная с целочисленной неоднозначности двойной разности или неоднозначностей, имеющих наибольшее значения W-отношения (604, фиг.6A), тестировать каждую целочисленную неоднозначность двойной разности в упорядоченном списке до тех пор, или (1) пока не будет достигнут конец списка без выбора каких-либо целочисленных неоднозначностей двойной разности (616-да, фиг.6A), в этом случае процесс переходит на этап 9, или (2) пока не будет достигнута обнаруженная целочисленная неоднозначность двойной разности, которая удовлетворяет условным уравнениям (28)-(30) (608-да, фиг.6A). В последнем случае, выбрать идентифицированную целочисленную неоднозначность двойной разности и также выбрать любые другие целочисленные неоднозначности двойной разности, имеющие такое же W-отношение, которое также удовлетворяет условным уравнениям (28)-(30) (604, 606, фиг.6A). Перейти на этап 5 для обработки одной или нескольких выбранных целочисленных неоднозначностей двойной разности.
5. Модифицировать уравнения обновления фильтра Калмана и также уточнить состояние фильтра Калмана применением одного или нескольких ограничений целочисленной неоднозначности двойной разности (610, фиг.6A). Если имеется только одна выбранная целочисленная неоднозначность двойной разности, модифицировать уравнения обновления фильтра Калмана при помощи уравнений (16) и (18) ограничения DD для выбранной единственной целочисленной неоднозначности двойной разности. Если были выбраны две или более целочисленные неоднозначности двойной разности, модифицировать уравнения обновления фильтра Калмана при помощи уравнений (23) и (24) ограничения DD для наилучшей группы целочисленных неоднозначностей двойной разности. Одна или несколько выбранных целочисленных неоднозначностей двойной разности теперь представляют собой «фиксированные» целочисленные неоднозначности двойной разности (см. 610, фиг.6A).
6. Удалить одну или несколько фиксированных целочисленных неоднозначностей двойной разности из списка подлежащих фиксированию DD (см. 612, фиг.6A).
7. Повторно вычислить неоднозначности DD, дисперсию и W-отношение для оставшихся целочисленных неоднозначностей двойной разности в списке подлежащих фиксированию DD (см. 614, фиг.6A).
8. Удалить избыточные целочисленные неоднозначности DD из списка подлежащих фиксированию DD (см. 615, фиг.6A). Если достаточное количество целочисленных ограничений было наложено на целочисленные неоднозначности DD, некоторые из оставшихся целочисленных неоднозначностей DD будут избыточными, так как они соответствуют линейным комбинациям целочисленных ограничений DD, для которых целочисленные ограничения уже были наложены. В некоторых вариантах осуществления эта операция выполняется посредством удаления из списка подлежащих фиксированию DD всех оставшихся неоднозначностей DD, для которых (A) дробная часть неоднозначности DD равняется нулю ({DD}=0), и (B) дисперсия = 0. Альтернативно, если ненулевое значение R используется в уравнениях (25) и (26) выше, удалить из списка подлежащих фиксированию DD все оставшиеся неоднозначности DD, для которых (A) дробная часть неоднозначности DD меньше квадратного корня R (или другого заданного порогового значения, которое соответствует квадратному корню из R), и (B) дисперсия = 0. Если список подлежащих фиксированию DD не является пустым (616-нет), продолжить обработку на этапе 4 (618, 620, фиг.6B).
9. Разрешение неоднозначности останавливается (622, фиг.6A).
Фиг.4 представляет собой блок-схему последовательности операций способа 400, выполняемого компьютерной системой, такой как компьютерная система 130 (фиг.1, фиг.3), для вычисления оцененного состояния множества глобальных навигационных спутников и для уточнения вычисленного оцененного состояния посредством применения ограничений к одной или нескольким целочисленным неоднозначностям двойной разности, которые удовлетворяют заданным критериям, согласно некоторым вариантам осуществления. В некоторых вариантах осуществления операции 402-408 на фиг.4 выполняются модулем 320 фильтра Калмана (фиг.3) компьютерной системы 130, операция 412 выполняется корректирующим модулем 330, и операция 414 выполняется модулем 314 связи.
Компьютерная система принимает (402) от множества опорных станций (140, фиг.1) в известных местоположениях множество спутниковых навигационных измерений сигналов от множества глобальных навигационных спутников (110, фиг.1). Компьютерная система вычисляет (404) состояние множества глобальных навигационных спутников, основываясь на принятых спутниковых навигационных измерениях. В некоторых вариантах осуществления компьютер использует фильтр Калмана для выполнения этого вычисления. Например, модуль 320 фильтра Калмана (фиг.3) использует фильтр Калмана для вычисления оцененного состояния множества глобальных навигационных спутников (например, состояние 326 глобальных навигационных спутников 110-1 - 110-N) для текущей эпохи измерений, основываясь на множестве спутниковых навигационных измерений. В некоторых вариантах осуществления состояние 326 множества глобальных навигационных спутников включает в себя положение каждого глобального навигационного спутника в множестве глобальных навигационных спутников, скорость каждого глобального навигационного спутника в множестве глобальных навигационных спутников и время, сообщаемое каждым глобальным навигационным спутников в множестве глобальных навигационных спутников. В некоторых вариантах осуществления состояние множества глобальных навигационных спутников для эпохи измерения вычисляется с использованием уравнения обновления в замкнутой форме.
Операция 404 иногда в данном документе называется начальным вычислением состояния множества глобальных навигационных спутников, за которой следует операция уточнения (408), описанная ниже. В некоторых вариантах осуществления начальное вычисление состояния множества глобальных навигационных спутников включает в себя вычисление и разрешение широкополосных неоднозначностей одинарной разности (406). Как описано выше, сначала разрешаются широкополосные неоднозначности, например, используя обычные методы, описанные выше. Затем проверяется достоверность разрешенных широкополосных неоднозначностей, и фиксируются любые некорректные разрешения широкополосной неоднозначности, например, посредством восстановления соответствующих значений плавающей неоднозначности. Посредством выполнения разрешения широкополосной неоднозначности вместе с известными местоположениями опорных станций оцененное состояние глобальных навигационных спутников, которое также называется состоянием фильтра Калмана, делается готовым для применения ограничений целочисленной неоднозначности двойной разности (408).
Как отмечено ниже, любая базовая линия (или эквивалентно, любая целочисленная неоднозначность двойной разности), соответствующая паре «опорная станция - спутник», для которой разрешение широкополосной неоднозначности было неуспешным, не является возможным вариантом для применения ограничения целочисленной неоднозначности двойной разности. Другими словами, так как каждая соответствующая целочисленная неоднозначность двойной разности является зависимой от точных измерений двумя опорными станциями одних и тех же двух сигналов от опорного спутника, если любые из этих измерений (для соответствующей целочисленной неоднозначности двойной разности) не удовлетворяют заданным требованиям для разрешения широкополосной целочисленной неоднозначности, эта целочисленная неоднозначность двойной разности не является возможным вариантом для применения целочисленного ограничения.
После вычисления оцененного состояния глобальных навигационных спутников (406), процесс 400 продолжается выполнением процедуры (408) разрешения целочисленной неоднозначности двойной разности для идентификации целочисленных неоднозначностей двойной разности, которые удовлетворяют набору заданных условий, и уточнения вычисленного состояния глобальных навигационных спутников посредством добавления целочисленного ограничения к фильтру Калмана для каждой целочисленной неоднозначности двойной разности, которая удовлетворяет заданному набору условий. В некоторых вариантах осуществления процедура разрешения целочисленной неоднозначности двойной разности выполняется в соответствии с блок-схемой последовательности операций, показанной на фиг.5A-5B, как описано более подробно ниже. В некоторых вариантах осуществления процедура разрешения целочисленной неоднозначности двойной разности выполняется в соответствии с блок-схемой последовательности операций, показанной на фиг.6A-6B, как описано более подробно ниже. Отмечается, что блок-схема последовательности операций на фиг.5A-5B не является противоречащей блок-схеме последовательности операций, показанной на фиг.6A-6B, но, вместо этого, эти две блок-схемы последовательности операций рассматривают процедуру разрешения целочисленной неоднозначности двойной разности с разных точек зрения и с разными уровнями детализации.
Выполнение процедуры разрешения целочисленной неоднозначности двойной разности для соответствующей эпохи измерений уточняет оцененное состояние множества глобальных навигационных спутников, учитывая влияние целочисленных ограничений, накладываемых на одну или несколько целочисленных неоднозначностей двойной разности. В некоторых вариантах осуществления, когда целочисленное ограничение налагается на единственную выбранную целочисленную неоднозначность двойной разности, уточнения оцененного состояния выполняются в соответствии с уравнениями (16) и (18) обновления фильтра Калмана, как описано выше. В некоторых вариантах осуществления, когда целочисленные ограничения применяются к двум или более целочисленным неоднозначностям двойной разности, уточнения оцененного состояния выполняются в соответствии с уравнениями (23) и (24), как описано выше.
В некоторых вариантах осуществления при завершении процедуры (408) разрешения целочисленной неоднозначности двойной разности для текущей эпохи измерений пересмотренное состояние глобальных навигационных спутников используется для вычисления корректирующих сигналов (например, корректирующих сигналов 132), которые корректируют орбитальные отклонения глобальных навигационных спутников 110-1 - 110-N (412). Корректирующий модуль 330 использует пересмотренное состояние множества глобальных навигационных спутников для вычисления корректирующих сигналов, которые компенсируют орбитальные отклонения множества глобальных навигационных спутников (412). Как отмечено выше, в некоторых вариантах осуществления коррекции тропосферных эффектов и/или ионосферных эффектов вычисляются с использованием методов, которые хорошо известны для специалиста в данной области техники, и эти коррекции включаются в корректирующие сигналы. Компьютерная система 130 затем передает (414) корректирующие сигналы на один или несколько спутниковых навигационных приемников 120. В некоторых вариантах осуществления корректирующие сигналы передаются при помощи одного или нескольких спутников 160 связи. В других вариантах осуществления другие сети связи или носители используются для передачи корректирующих сигналов на спутниковые навигационные приемники 120.
В некоторых вариантах осуществления при завершении процедуры (408) разрешения целочисленной неоднозначности двойной разности для текущей эпохи измерений процесс 400 повторяется, начиная с операции 402, для следующей эпохи измерений.
Как показано на фиг.5A, в некоторых вариантах осуществления выполнение процедуры (408) разрешения целочисленной неоднозначности двойной разности включает в себя идентификацию множества базовых линий, причем каждая базовая линия соответствует паре опорных станций, и для каждой идентифицированной базовой линии вычисление плавающих и целочисленных значений для целочисленной неоднозначности двойной разности, соответствующей идентифицированной базовой линии (520). В некоторых вариантах осуществления идентификация базовых линий (520) выполняется посредством идентификации набора математически независимых базовых линий, как описано выше. В других вариантах осуществления набор базовых линий идентифицируется без требования, чтобы они были независимыми, и, вместо этого, первоначально идентифицируется больший набор базовых линий. В последних вариантах осуществления каждый раз, когда целочисленные ограничения налагаются на одну или несколько целочисленных неоднозначностей двойной разности, как соответствующие базовые линии, так и все базовые линии, которые представляют собой линейные комбинации базовых линий, для которых были применены целочисленные ограничения, отмечаются как обработанные (см. операции 612 и 615, фиг.6A).
После идентификации базовых линий (520) процедура (408) разрешения целочисленной неоднозначности двойной разности идентифицирует, в соответствии с вычисленными плавающими и целочисленными значениями для целочисленных неоднозначностей двойной разности, соответствующих множеству идентифицированных базовых линий, набор из одной или нескольких целочисленных неоднозначностей двойной разности, которые удовлетворяют набору заданных условий (522). Заданные условия описаны выше в отношении уравнений (28), (29) и (30).
В некоторых вариантах осуществления набор заданных условий для соответствующей целочисленной неоднозначности двойной разности включает в себя требование, чтобы дробная разность между целочисленными и плавающими значениями соответствующей целочисленной неоднозначности двойной разности не превышала первого заданного порогового значения (504, фиг.5B). Например, см. уравнение (28), и соответствующее обсуждение выше. Кроме того, в некоторых вариантах осуществления способ включает в себя вычисление дисперсии и среднеквадратического отклонения соответствующей целочисленной неоднозначности двойной разности, и набор заданных условий для соответствующей целочисленной неоднозначности двойной разности включает в себя требование, чтобы среднеквадратическое отклонение соответствующей целочисленной неоднозначности двойной разности не превышало второго заданного порогового значения (506, фиг.5B). Например, см. уравнение (29) и соответствующее обсуждение выше. В некоторых вариантах осуществления первый порог не больше 0,25 цикла, и второй порог не больше 0,1 цикла (510, фиг.5B).
Кроме того, в некоторых вариантах осуществления операция 522 включает в себя вычисление заданного W-отношения (например, см. уравнение (27) выше) для соответствующей целочисленной неоднозначности двойной разности, в которой W-отношение имеет числитель, соответствующий дробной разности между целочисленными и плавающими значениями соответствующей целочисленной неоднозначности двойной разности, и знаменатель, соответствующий среднеквадратическому отклонению соответствующей целочисленной неоднозначности двойной разности, и в которой набор заданных условий для соответствующей целочисленной неоднозначности двойной разности включает в себя требование, чтобы W-отношение для соответствующей целочисленной неоднозначности двойной разности было больше третьего порога (508). Кроме того, набор заданных условий для соответствующей целочисленной неоднозначности двойной разности включает в себя требование, чтобы заданное W-отношение имело значение, которое превышает третье заданное пороговое значение (например, см. уравнения (27) и (30) и соответствующее обсуждение выше). В некоторых вариантах осуществления третий заданный порог не меньше 2,5; в некоторых вариантах осуществления третий заданный порог не меньше 3,0.
В некоторых вариантах осуществления после идентификации набора из одной или нескольких целочисленных неоднозначностей двойной разности, которые удовлетворяют набору заданных условий (522), процедура (408) разрешения целочисленной неоднозначности двойной разности уточняет вычисленное состояние множества глобальных навигационных спутников в соответствии с целочисленным ограничением, применяемым к каждой целочисленной неоднозначности двойной разности в идентифицированном наборе из одной или нескольких целочисленных неоднозначностей двойной разности, которые удовлетворяют набору заданных условий, для получения уточненного вычисленного состояния множества глобальных навигационных спутников (524).
В некоторых вариантах осуществления набор заданных условий включает в себя требование для соответствующей целочисленной неоднозначности двойной разности, чтобы были зафиксированы обе соответствующие широкополосные неоднозначности. Любая целочисленная неоднозначность двойной разности, соответствующая нефиксированной широкополосной неоднозначности, игнорируется, и даже нет возможного варианта для идентификации в качестве целочисленной неоднозначности двойной разности, которая удовлетворяет набору заданных условий. Кроме того, в некоторых вариантах осуществления фильтруются целочисленные неоднозначности двойной разности, соответствующие идентифицированным базовым линиям, до выполнения операции 522, или в начале операции 522, чтобы предотвратить включение любых целочисленных неоднозначностей двойной разности, которые не удовлетворяют заданным критериям фильтрации, в идентифицированный набор (512). Например, заданные критерии фильтрации могут включать в себя требование для соответствующей целочисленной неоднозначности двойной разности, чтобы соответствующие широкополосные неоднозначности были обработаны в течение по меньшей мере заданного периода времени (например, 4-6 часов), чтобы обеспечить надежную основу для определения дисперсии соответствующей целочисленной неоднозначности двойной разности и для того, чтобы иметь высокий уровень достоверности в разрешении соответствующих широкополосных неоднозначностей.
Процесс, описываемый блок-схемой последовательности операций на фиг.6A-6B, соответствует операциям 522 и 524 (фиг.5A) процедуры (408) разрешения целочисленной неоднозначности двойной разности для идентификации целочисленных неоднозначностей двойной разности, которые удовлетворяют набору заданных условий, и уточнения вычисленного состояния глобальных навигационных спутников посредством добавления целочисленного ограничения к фильтру Калмана для каждой целочисленной неоднозначности двойной разности, которая удовлетворяет заданному набору условий. Фиг.6A-6B описаны выше.
Как показано на фиг.7, в некоторых вариантах осуществления спутниковый навигационный приемник 120 (фиг.1, фиг.2) принимает навигационные сигналы от множества глобальных навигационных спутников (702) и также принимает корректирующие сигналы (например, корректирующие сигналы 132), которые корректируют орбитальные отклонения глобальных навигационных спутников (704). Например, спутниковый навигационный приемник 120 может принимать корректирующие сигналы 132 от компьютерной системы 130 при помощи одного или нескольких спутников 160-1 - 160-P связи. Фиг.7 представляет собой блок-схему последовательности операций способа 700 для уточнения состояния спутникового навигационного приемника 120, основываясь на принятых корректирующих сигналах, согласно некоторым вариантам осуществления. Модуль 218 GNSS принимает навигационные сигналы от множества глобальных навигационных спутников (702) и также принимает (704) корректирующие сигналы, которые компенсируют орбитальные отклонения множества глобальных навигационных спутников. Модуль 218 GNSS затем включает корректирующие сигналы (706) в его вычисление обновленного состояния спутникового навигационного приемника. Например, модуль 218 GNSS может включать корректирующие сигналы посредством пересмотра навигационных спутниковых измерений перед их использованием при вычислении обновленного состояния спутникового навигационного приемника 120 для компенсирования различных источников ошибок, таких как орбитальное отклонение спутников от их расчетных орбит (например, орбит, вычисляемых с использованием эфемеридных данных, широковещательно передаваемых навигационными спутниками; в некоторых вариантах осуществления эфемеридные данные для навигационных спутников также доступны из вычислительного центра GNSS (например, GPS) или другой службы, задачей которой является своевременное распределение эфемеридных данных), тропосферные эффекты и ионосферные эффекты.
Вышеприведенное описание, для целей объяснения, было описано с ссылкой на конкретные варианты осуществления. Однако предполагается, что иллюстративные описания выше не являются исчерпывающими или ограничивают изобретение описанными точными видами. Возможны многочисленные модификации и разновидности с учетом вышеупомянутых идей. Варианты осуществления были выбраны и описаны, чтобы наилучшим образом объяснить принципы изобретения и его практические применения, чтобы таким образом предоставить возможность специалисту в данной области техники наилучшим образом использовать изобретение и различные варианты осуществления с многочисленными модификациями, которые подходят к рассматриваемому конкретному использованию.
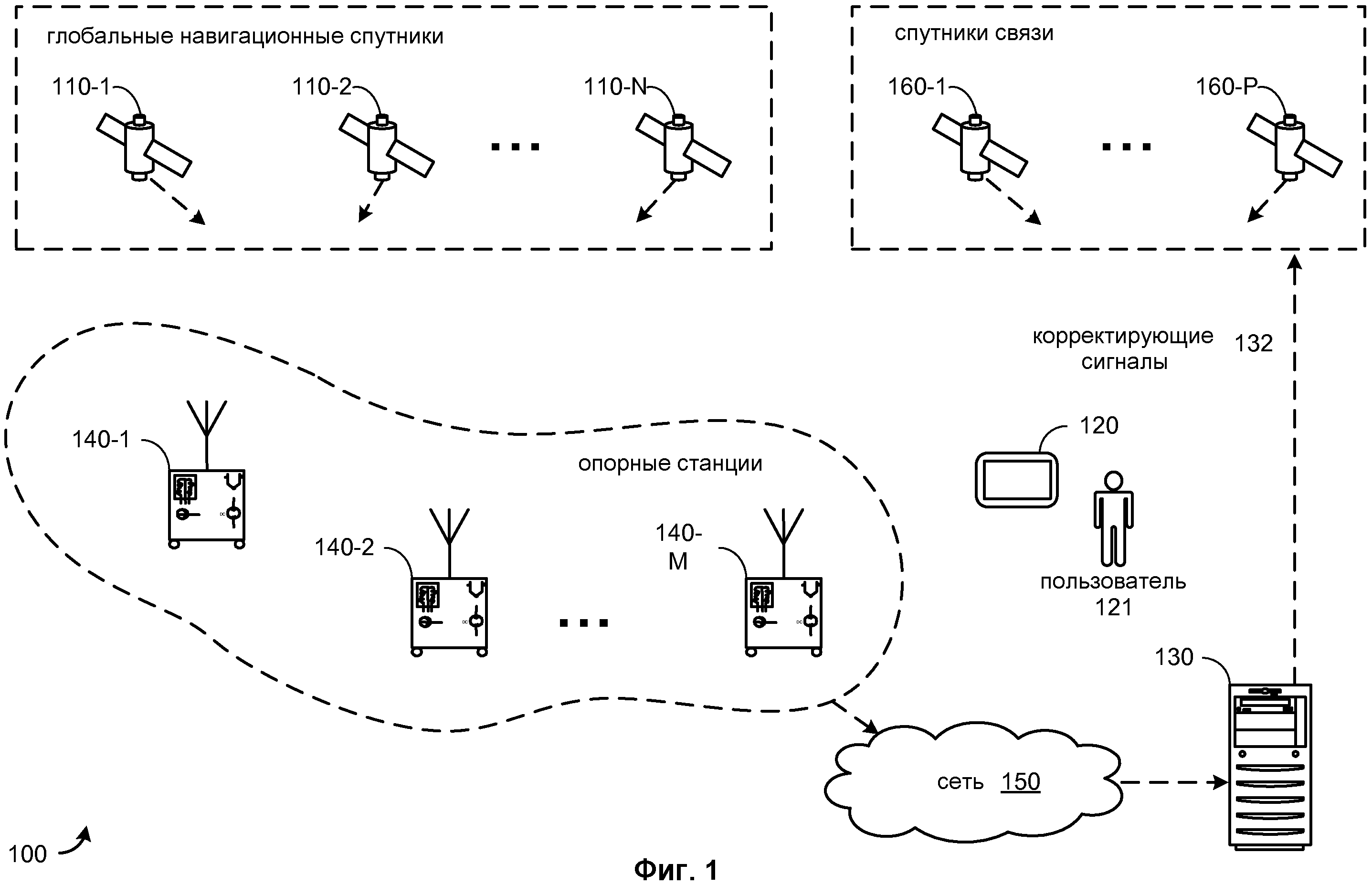
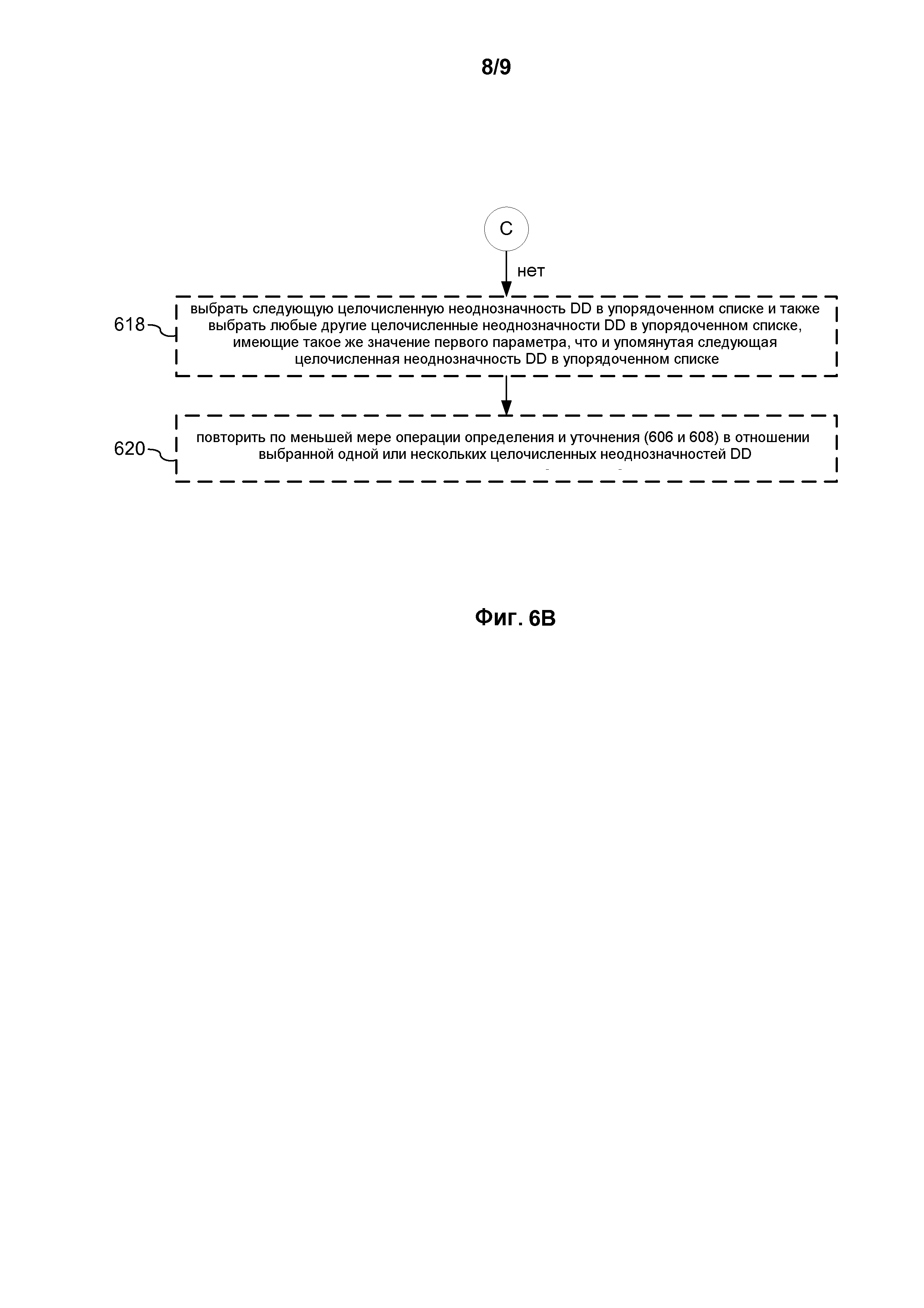
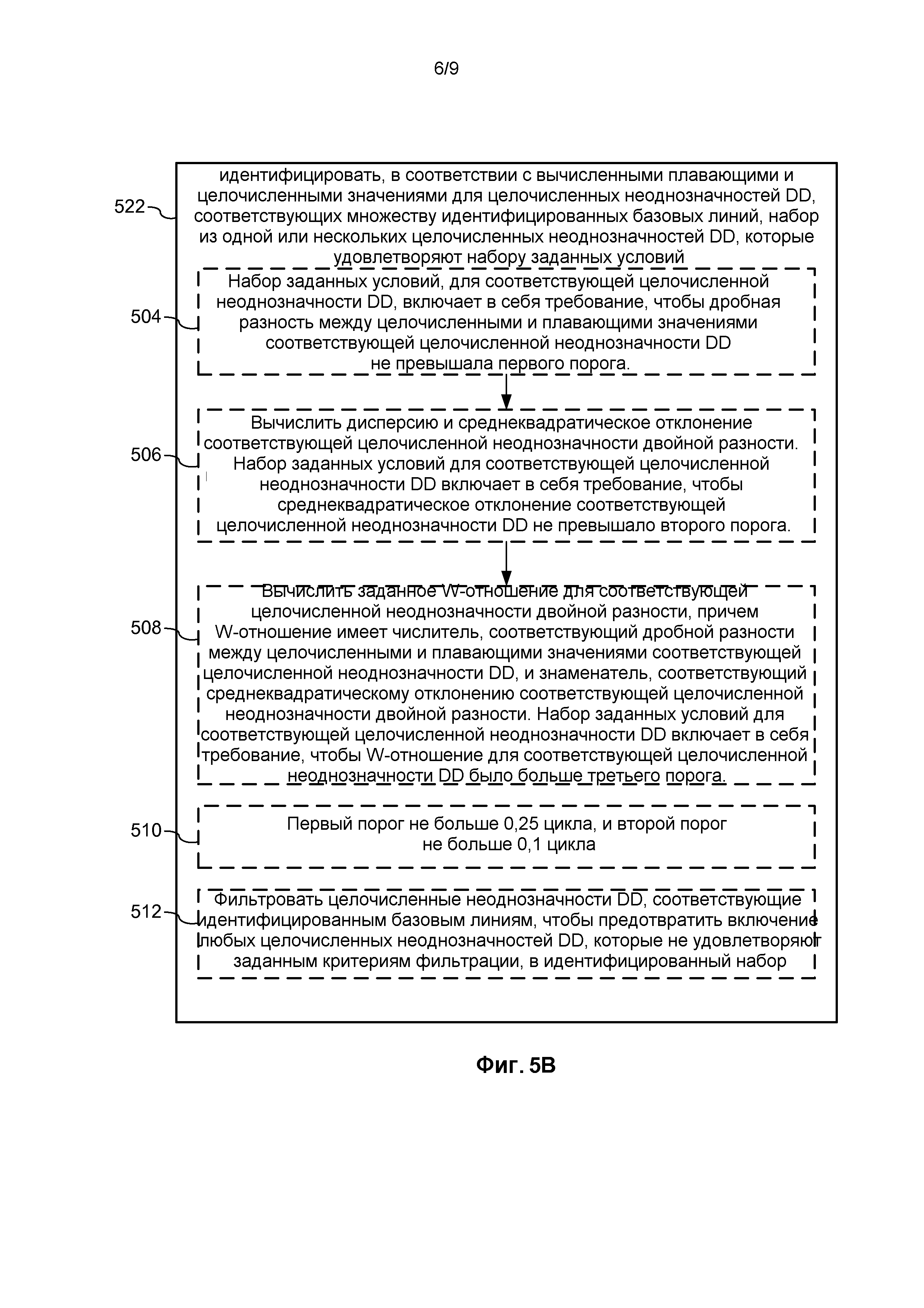
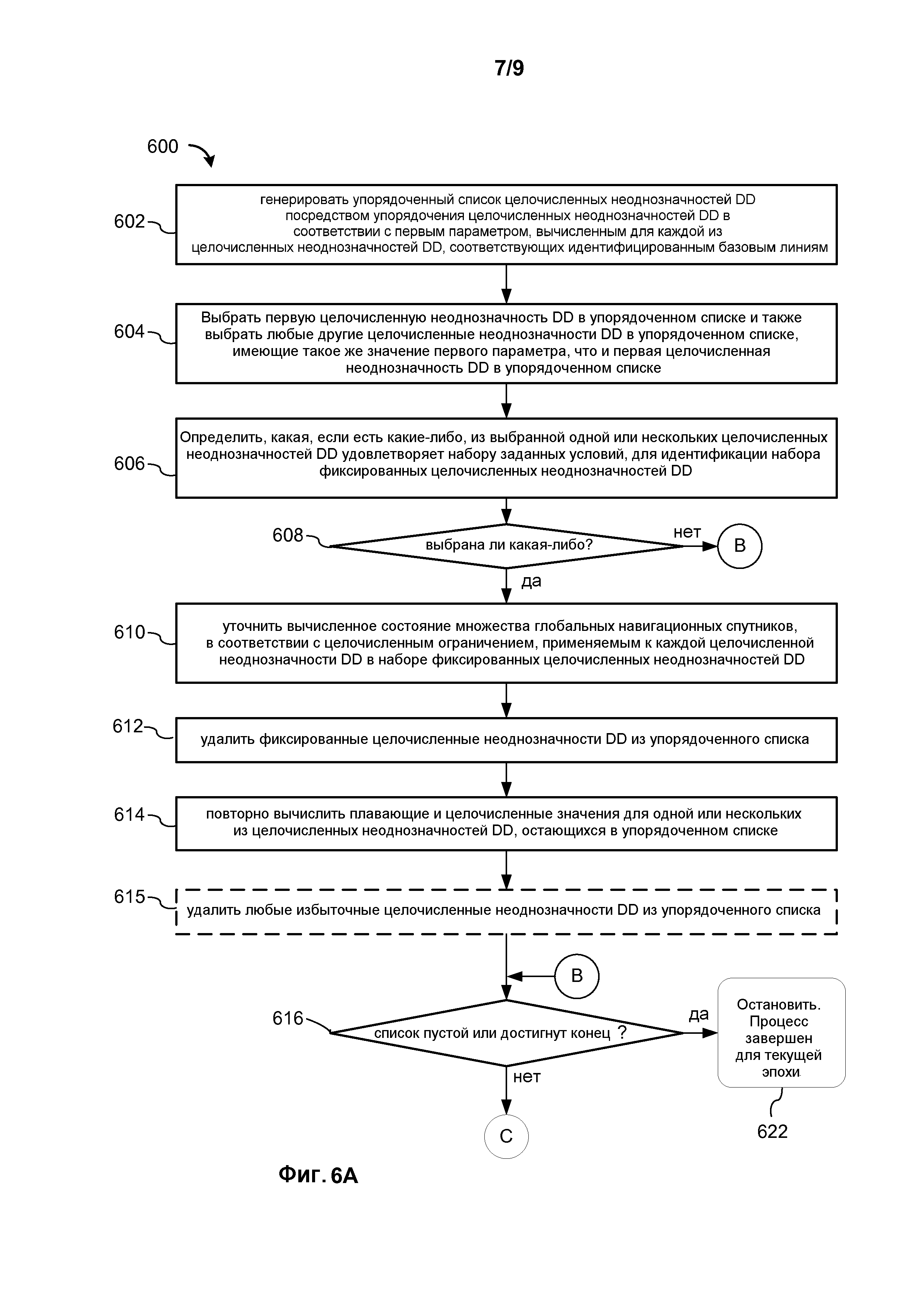
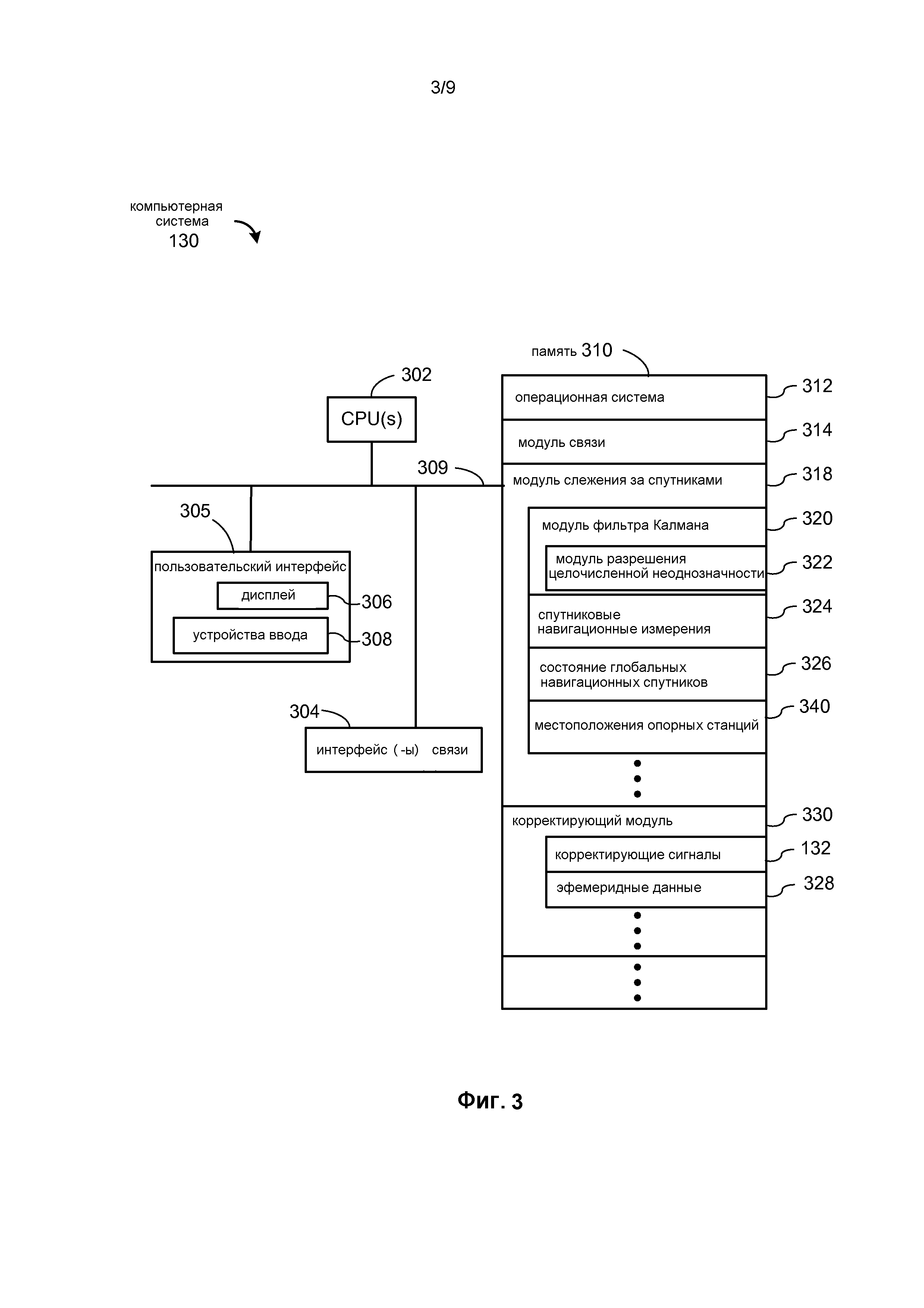
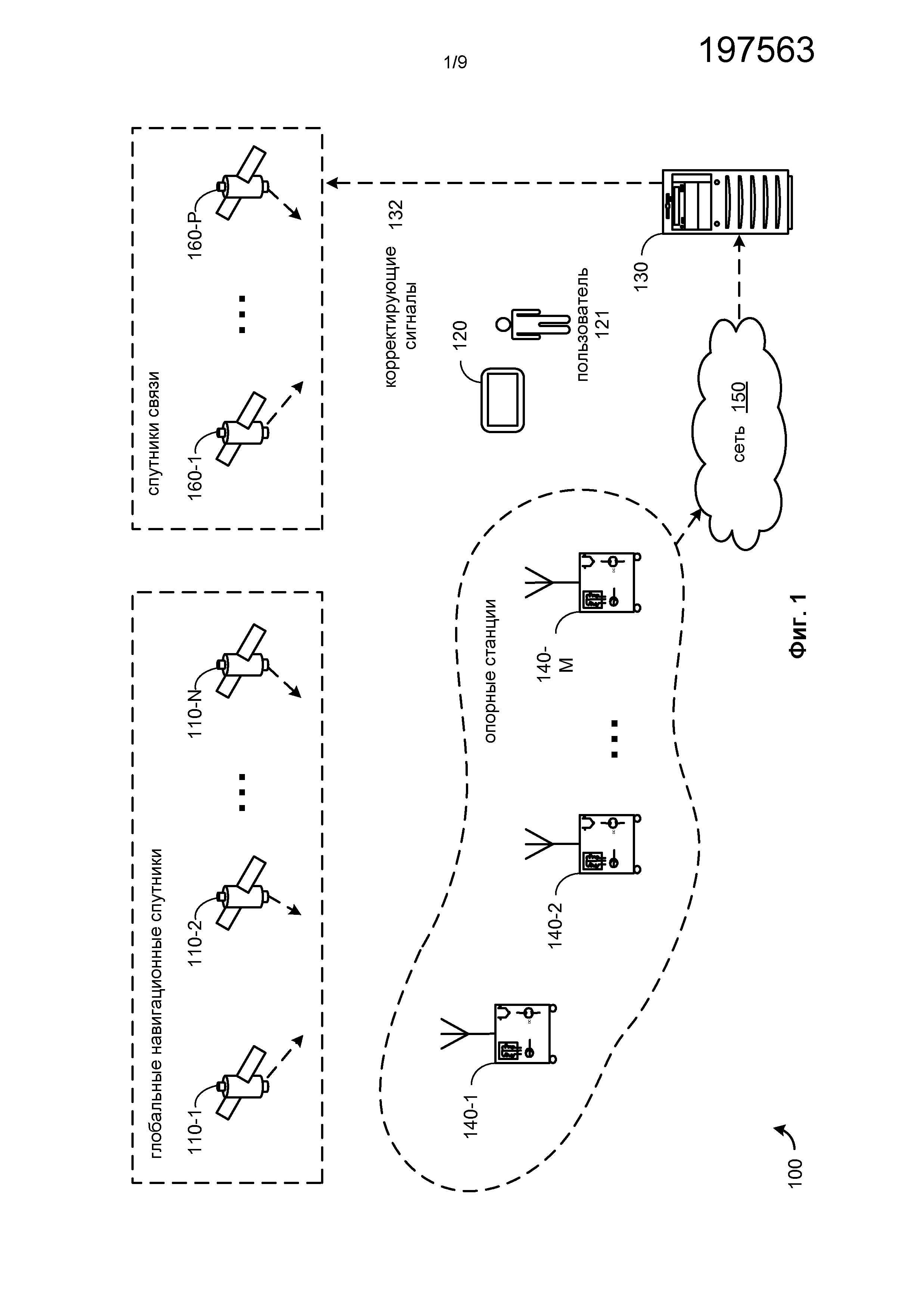
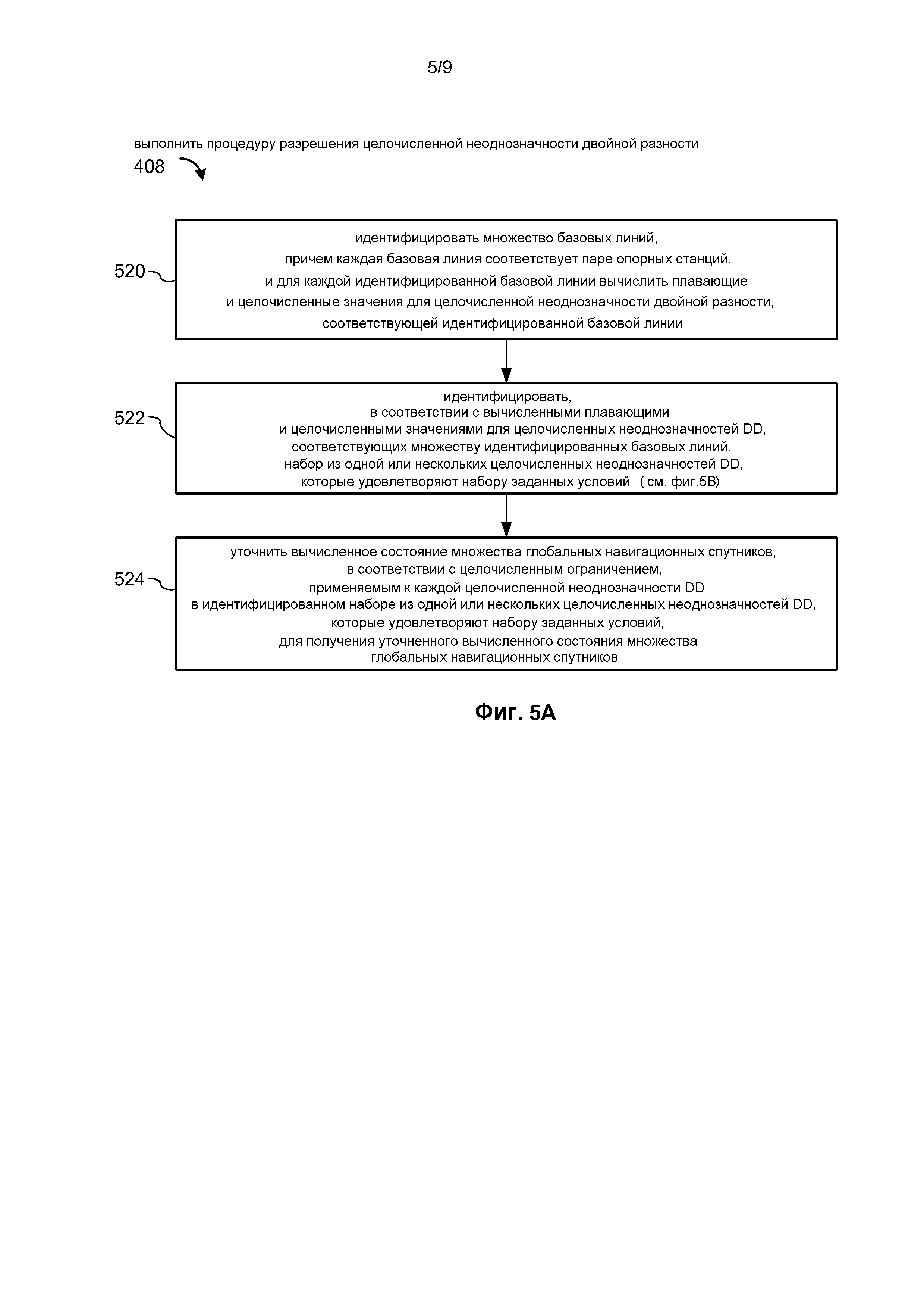
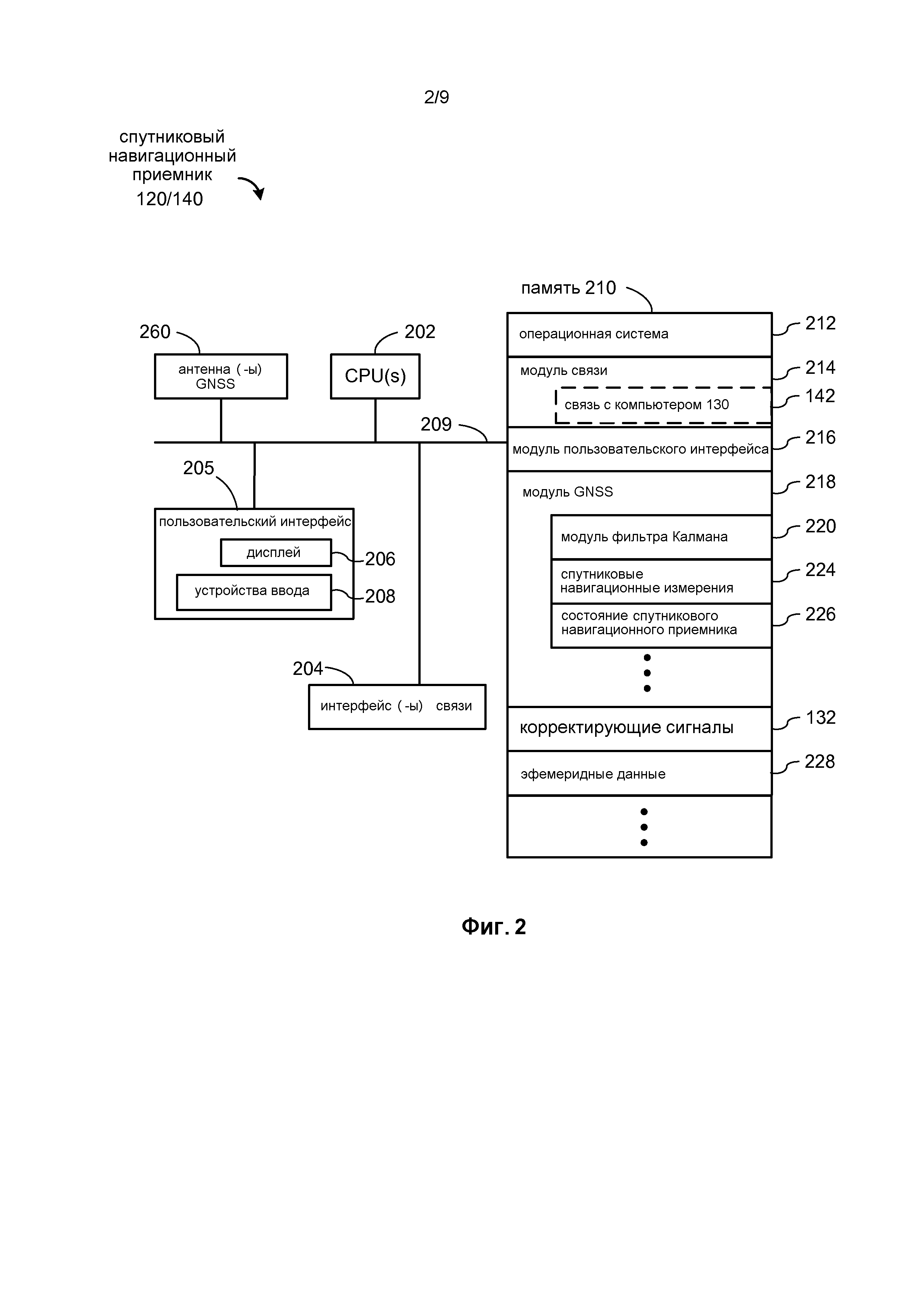
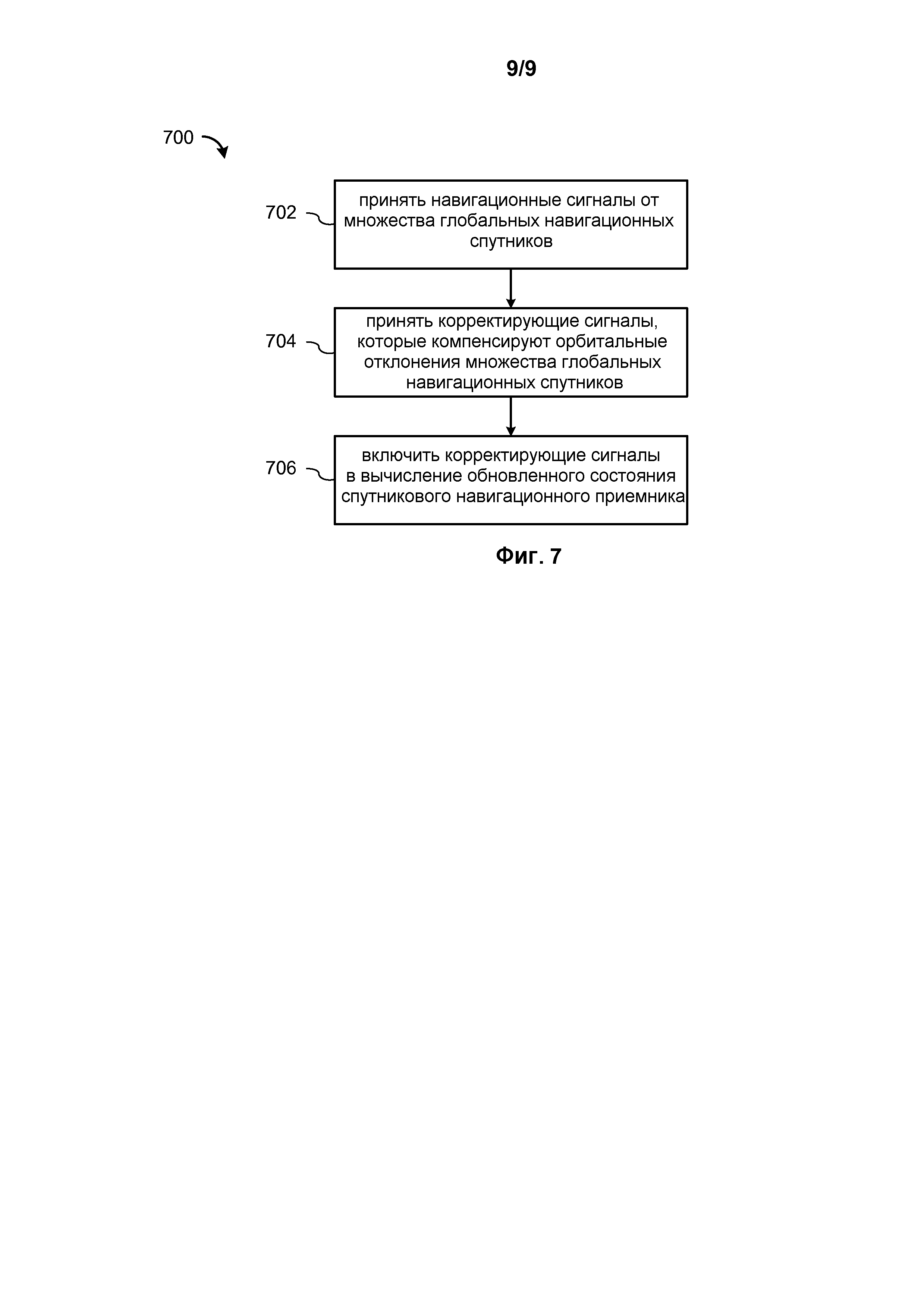
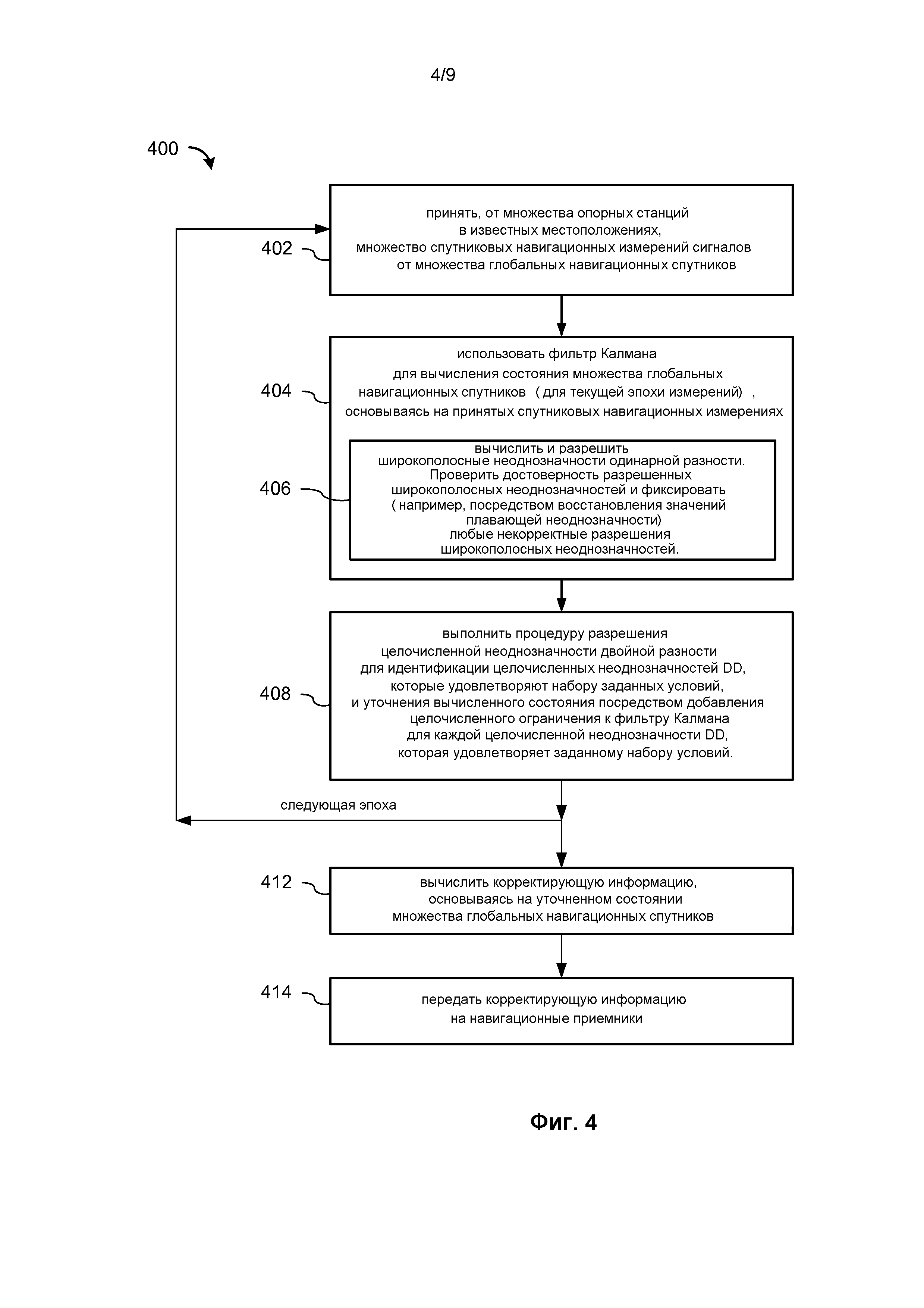
Режущая система с возвратно-поступательными ножами
Самоочищающееся рядное устройство
Втулка привода высеивающего диска
Распределительный кривошип и цилиндрический конвейер для сельскохозяйственной уборочной машины
Рабочая машина с бесступенчатой коробкой передач, мощность которой автоматически регулируется в зависимости от нагрузки двигателя
Разрешение целочисленной неоднозначности фазы несущей методом частичного поиска
Зависящее от расстояния уменьшение ошибки при определении местоположения в режиме кинематики реального времени
Сельскохозяйственный виндроуэр (варианты) и жатка для уборки зерновых
Дифференциальная трансмиссия с функцией очистки
Сельскохозяйственная посевная система
Режущая система с возвратно-поступательными ножами
Самоочищающееся рядное устройство
Втулка привода высеивающего диска
Распределительный кривошип и цилиндрический конвейер для сельскохозяйственной уборочной машины
Рабочая машина с бесступенчатой коробкой передач, мощность которой автоматически регулируется в зависимости от нагрузки двигателя
Рабочая машина с управлением ограничением крутящего момента для бесступенчатой трансмиссии
Разрешение целочисленной неоднозначности фазы несущей методом частичного поиска
Отражатель недомолоченных колосков устройства повторного обмолота
Сельскохозяйственный виндроуэр (варианты) и жатка для уборки зерновых
Дифференциальная трансмиссия с функцией очистки

