Результат интеллектуальной деятельности: ЭЛЕКТРОПРИВОДНОЙ МОДУЛЬ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
Данное изобретение относится к электроприводному модулю и, в частности, к синусоидальному (на жаргоне - АС (переменного тока)) электроприводному модулю.
Уровень техники
Ниже на примере неограничительного характера описан электроприводной модуль, содержащий бесщеточный трехфазный электродвигатель с постоянными магнитами, генерирующими противоэлектродвижущую силу (CEMF) с синусоидальной формой для привода в действие электромагнитных клапанов и насосов.
При применении электромагнитного клапана и электрического насоса требуется наличие минимального акустического шума и снижение как потребления энергии, так и затрат.
Данные потребности привели к разработке бесщеточных электродвигателей с синусоидальной CEMF (бесщеточные электродвигатели переменного тока), приводимых в движение инверторами, выполненными с возможностью прикладывать синусоидальные токи в обмотках, что привело к выходу из употребления бесщеточных электродвигателей постоянного тока, приводимых в движение на шести этапах в ШИМ (широтно-импульсной модуляции).
Синусоидальная форма CEMF, а вместе с ней и относительного фазного тока обеспечивают минимальное колебание (практически нулевое) активного крутящего момента и, как следствие, малые механические вибрации, и, следовательно, малое акустическое излучение.
Также возможно минимизировать поглощение тока для генерирования определенного крутящего момента на валу и таким образом максимально повысить КПД электромеханического преобразования, путем оптимального приведения в движение бесщеточных двигателей переменного тока, которые, как правило, приводятся в движение токоуправляемыми инверторами с приложенным напряжением.
Для такого привода требуется, чтобы переключение бесконтактных переключателей выполнялось таким образом, чтобы гарантировать в каждый момент времени то, что полярная ось магнитного поля ротора остается при 90 электрических градусах относительно полярной оси магнитного поля, генерируемого токами, циркулирующими в обмотках статора, вне зависимости от крутящего момента и скорости вращения.
Для получения непрерывной информации об угловом положении ротора обычно используются дорогостоящие датчики, например абсолютные энкодеры, датчики положения или датчики на эффекте Холла.
Выходные сигналы, сгенерированные датчиками, затем удобно обрабатываются для управления бесконтактными переключателями инвертора таким образом, чтобы поддерживать угловой сдвиг в 90 электрических градусов между магнитными полями ротора и статора.
Наличие датчиков положения делает эксплуатацию относительно дорогостоящей и, как следствие, были разработаны различные стратегии для привода, в которых датчики не используются (на жаргоне -"бездатчиковые") и которые специально предназначены для уменьшения затрат на эксплуатацию.
Среди данных стратегий есть стратегии, основанные на ориентации полей статора и ротора (на жаргоне - FOC), которые гарантируют вышеупомянутое ортогональное соотношение полей при использовании технически сложных и дорогостоящих интегральных схем (ИС) с высокими вычислительными способностями (на жаргоне - DSP), выполняющими расчет углового положения ротора в реальном времени исключительно на основе электрических величин (напряжений на клеммах электродвигателя и токов, циркулирующих в обмотках), наличие которых предоставляется соответствующими задающими схемами.
Если динамические характеристики приводимой в действие машины не являются слишком интенсивными, а это имеет место для электрических вентиляторов и электрических насосов, то возможно применить оптимальный критерий, полученный непосредственно из вышеупомянутого базового принципа, описанного ниже (полярная ось магнитного поля ротора поддерживается в каждый момент времени при 90 электрических градусах относительно полярной оси магнитного поля, генерируемого токами, циркулирующими в обмотках статора): привод функционирует таким образом, что CEMF и фазный ток поддерживаются в фазе; естественно, что вышеупомянутый критерий выполняется в каждой точке рабочего поля (крутящий момент, скорость вращения, напряжение питания постоянного тока).
"Бездатчиковые" приводы, в которых применяют стратегии для привода на основе вышеупомянутого критерия, базируются на считывании электрических величин (например, напряжения на клеммах электродвигателя, токов, циркулирующих в обмотках электродвигателя) с целью;
- детектирования перехода через ноль CEMF и тока;
- оценки относительной фазы между CEMF и током
- и применения подходящих способов привода в действие бесконтактных переключателей инвертора, который поддерживает в фазе две вышеупомянутые величины.
Первый недостаток данных стратегий заключается в том факте, что для обнаружения перехода через ноль CEMF, то есть для считывания знака CEMF в тот момент, когда переход тока в обмотках становится равным нулю, данное состояние должно сохраняться в течение достаточного продолжительного периода времени для того, чтобы обеспечить возможность считывания CEMF, что отличается от необходимой синусоидальной кривой тока для получения малого акустического шума.
Решение данной проблемы было предложено в патенте EP 2195916 на имя того же самого заявителя. Однако в раскрытом решении вводится дополнительная стоимость вследствие использования сети "аналогового" аппаратного обеспечения для импеданса фазы электродвигателя.
Второй недостаток вышеупомянутых стратегий управления связан с необходимостью считывания фазного тока. Существует, в целом, два подхода к данному считыванию, и в соответствии с уровнем техники оба являются затратными.
В первом подходе используется по меньшей мере одно устройство ИС, содержащее датчик на эффекте Холла, чувствительный к магнитному полю, генерируемому фазным током (решение с гальванической развязкой). Во втором подходе используется по меньшей мере одно устройство ИС, содержащее усилитель для обработки напряжения в шунте "внешней земли", через который протекает фазный ток (решение без гальванической развязки).
В первом случае ИС устройство должно быть расположено вблизи одного из проводников, через который проходит фазный ток, и должно иметь очень низкую чувствительность к "паразитным" магнитным полям.
Во втором случае синфазное входное напряжение, которое должен принимать усилитель без повреждения самого себя, должно быть по меньшей мере равным напряжению (Vbus) питания инвертора.
Раскрытие изобретения
В таком контексте главная техническая задача данного изобретения состоит в создании электроприводного модуля, в котором устранены вышеупомянутые недостатки как относительно эксплуатационных характеристик, так и относительно затрат.
Одна задача данного изобретения состоит в создании бесшумного электроприводного модуля с низким потреблением энергии.
Другая задача данного изобретения состоит в создании электроприводного модуля на основе простой управляющей архитектуры и конкурентоспособного по затратам.
Техническая задача, по существу, выполнена посредством электроприводного модуля, содержащего технические признаки, описанные в независимом пункте 1 формулы изобретения.
Краткое описание чертежей
Другие признаки и преимущества данного изобретения очевидны из нижеследующего неограничивающего описания предпочтительного не ограничивающего варианта осуществления электроприводного модуля, показанного на прилагаемых чертежах, на которых:
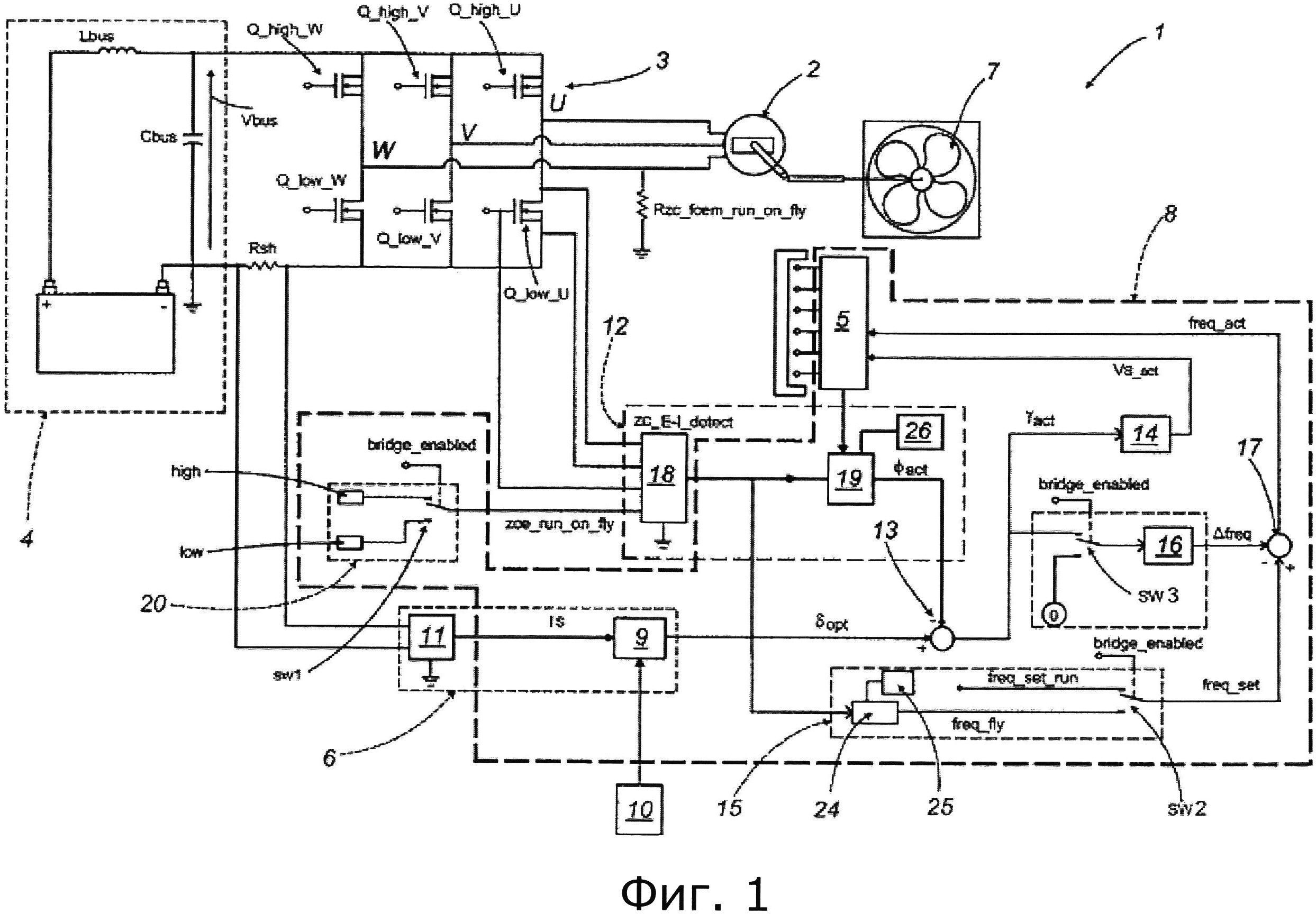
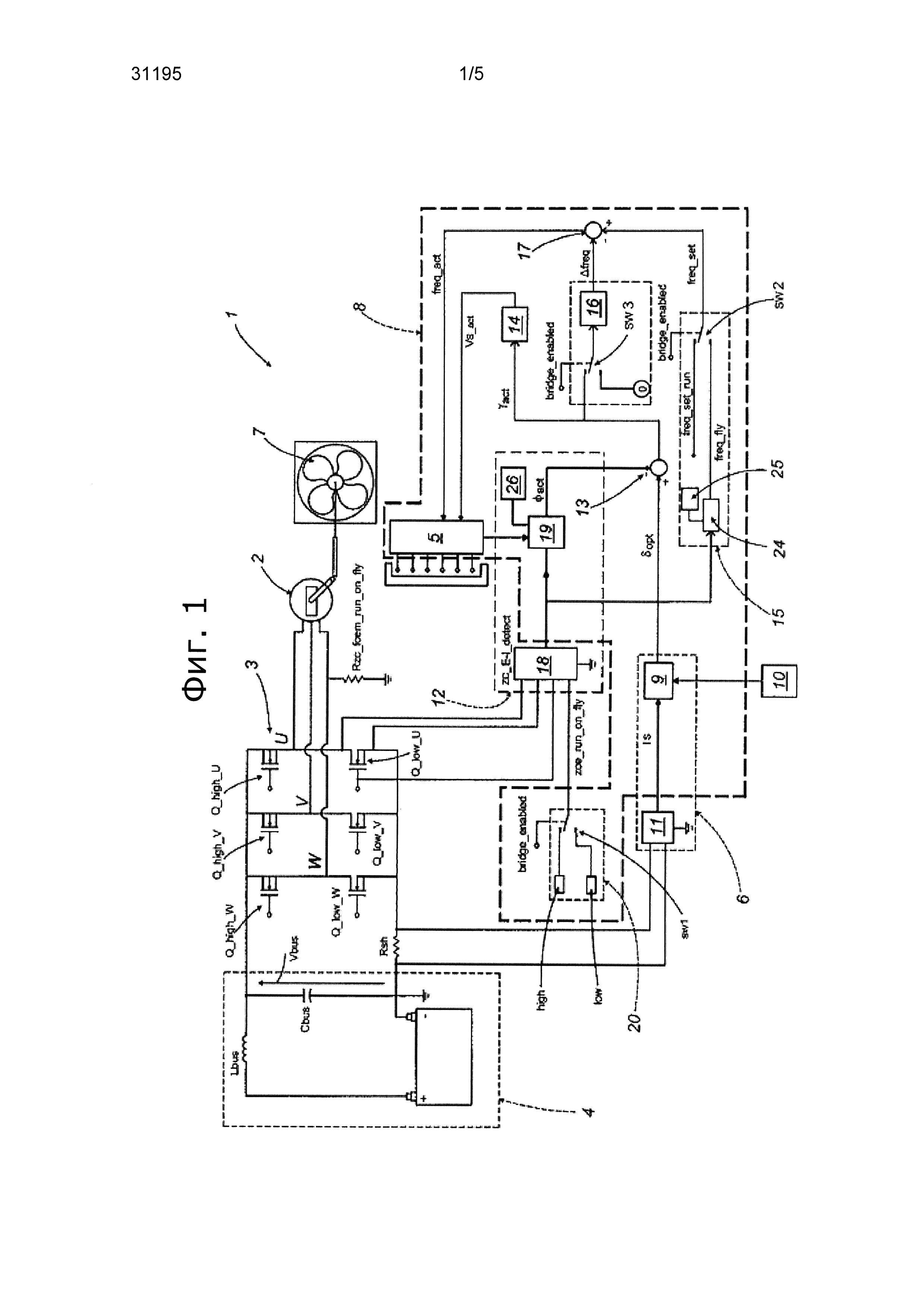
- на фиг.1 показана функциональная схема электроприводного модуля согласно изобретению;
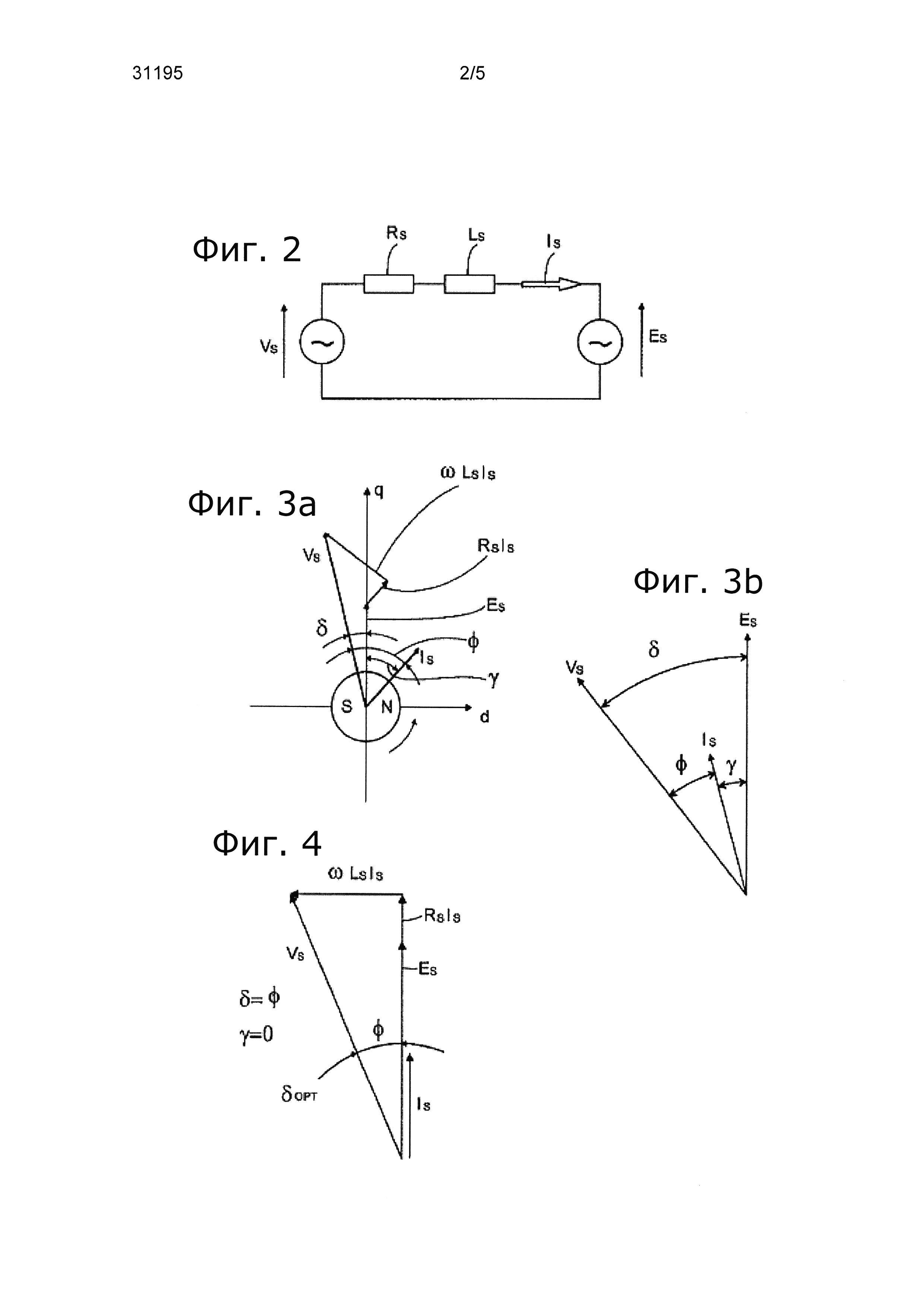
- на фиг.2 изображена эквивалентная схема фазы бесщеточного электродвигателя переменного тока;
- на фиг.3a показана векторная диаграмма относительно схемы, показанной на фиг.2;
- на фиг.3b изображена вторая векторная диаграмма относительно схемы, показанной на фиг.2;
- на фиг.4 показана векторная диаграмма относительно оптимального функционирования схемы, показанной на фиг.2;
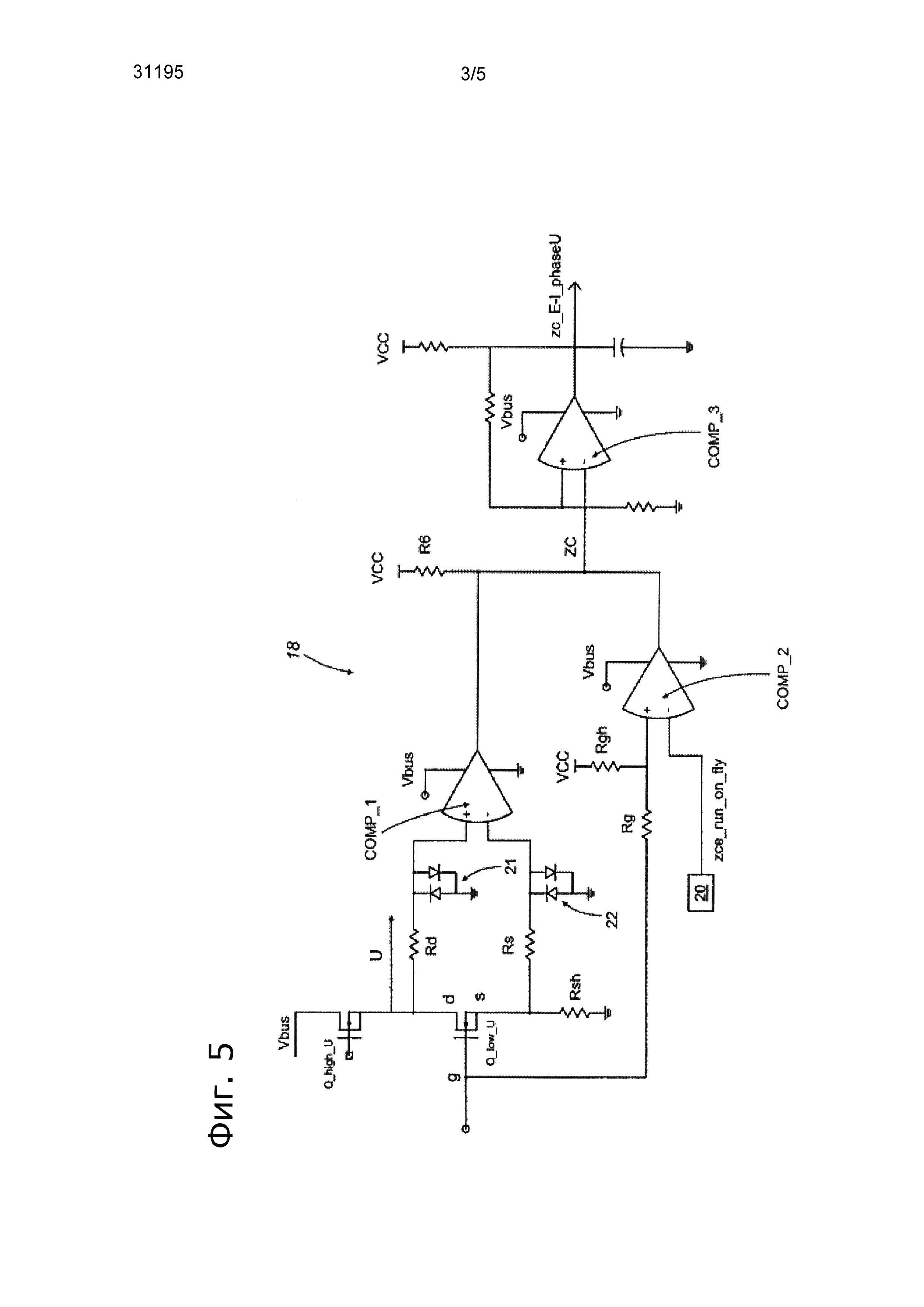
- на фиг.5 изображена частичная функциональная схема аналогового подмодуля, образующего часть приводного модуля, показанного на фиг.1;
- на фиг.6 показана диаграмма основных сигналов в аналоговом подмодуле, показанном на фиг.5;
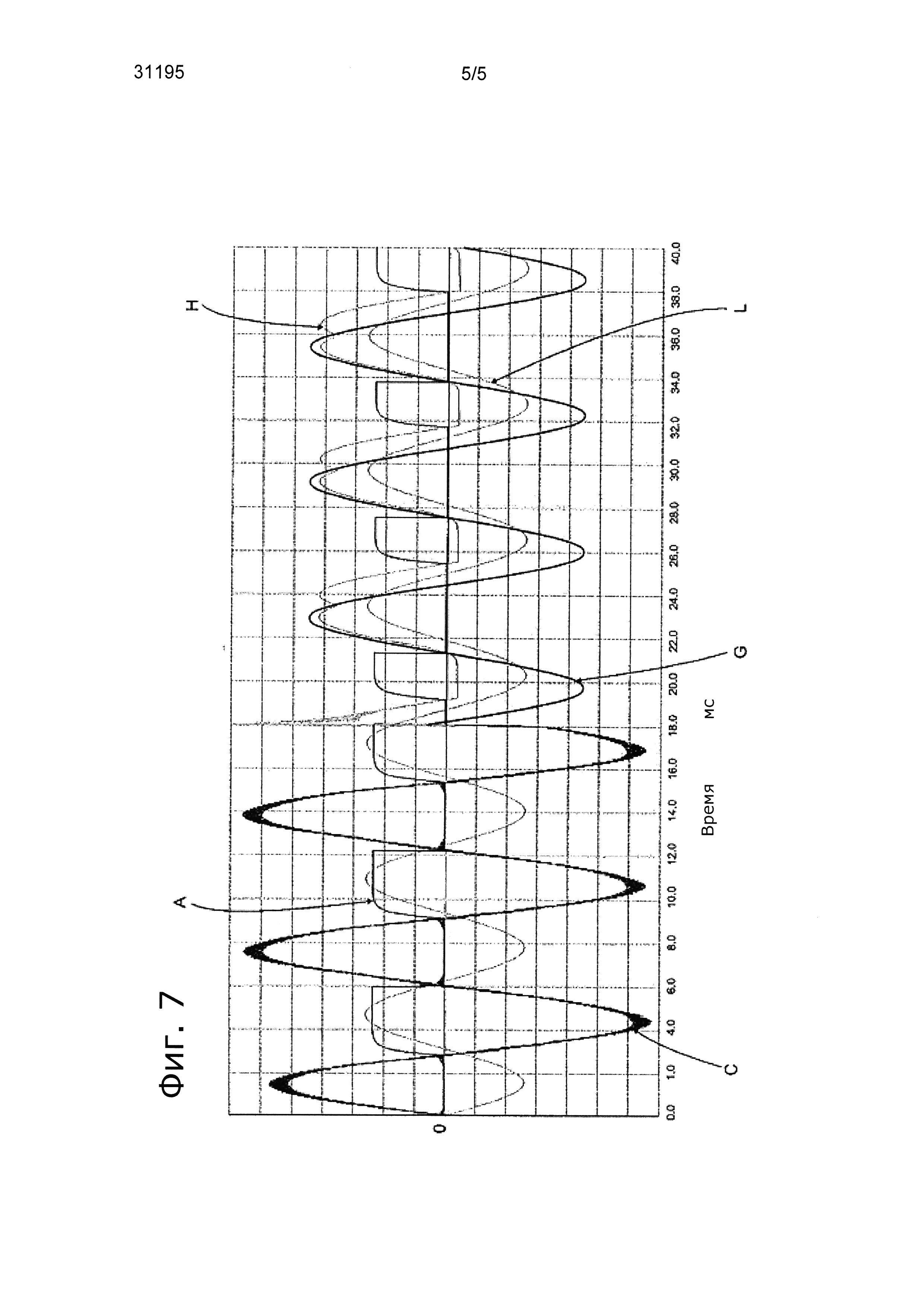
- на фиг.7 изображена диаграмма сигналов, относящихся к функции "поймать вращение ротора" приводного модуля, показанного на фиг.1.
Осуществление изобретения
При ссылке на прилагаемые чертежи, в частности при ссылке на фиг.1, номер позиции 1 обозначает электроприводной модуль согласно изобретению.
Следует отметить, что на функциональной схеме, показанной на фиг.1, не изображены компоненты, которые с точки зрения эксплуатации могут рассматриваться в качестве существующего уровня техники, то есть приводы с полевыми МОП-транзисторами и интерфейс для управления пользователем для аналоговых или цифровых входных сигналов извне, то есть для управляющих устройств, устанавливающих скорость или частоту для электроприводного модуля 1.
Электроприводной модуль 1 содержит электродвигатель 2 с постоянными магнитами, трехфазный мост или инвертор 3 для питания электрическим током под напряжением Vbus электродвигателя 2, ступень 4 постоянного тока для питания электрическим током инвертора 3 и контроллер 8 для приведения в действие инвертора 3.
Контроллер 8 является очень простым и недорогим приемным/обрабатывающим устройством и снабжен памятью для хранения данных.
Приводной модуль 1 также содержит, как это описано далее более подробно, недорогой аналоговый модуль 11 для измерения пикового значения фазного тока Is, известный как "pk_detect", и аналоговый модуль 18, известный как "zc_E-I_detect", для детектирования перехода через ноль тока первой фазы, например, фазы, обозначенной U, электродвигателя 2, причем оба аналоговых модуля сообщаются с контроллером 8.
В показанном варианте осуществления изобретения инвертор 3 имеет три ветви U, V, W, каждая из которых содержит пару полевых МОП-транзисторов, соответственно Q_high_U, Q_low_U, Q_high_V, Q_low_V и Q_high_W, Q_low_W, соединенных в соответствии с существующим уровнем техники.
Как показано на чертеже, ступень 4 снабжена ступенью фильтра, например, содержащей выравнивающий конденсатор (Cbus) и индуктивное сопротивление (Lbus).
Например, без какого-либо ограничения объема правовой охраны изобретения далее сделана ссылка на бесщеточный электродвигатель с постоянными магнитами, оснащенный биполярным изотропным ротором.
Трехфазная обмотка статора содержит три обмотки одинакового типа и с равным количеством витков, причем в данных обмотках предусмотрено смещение фазы на 120° и соединение звездой с недоступной нейтральной точкой звезды или соединение треугольником.
На фиг.2 изображена, например, модель схемы фазы электродвигателя, а на фиг.3 изображена векторная диаграмма электрических величин.
Каждая из трех обмоток характеризуется своим сопротивлением Rs, синхронным индуктивным сопротивлением Ls и CEMF, которая имеет синусоидальную кривую и возникает вследствие вращения ротора с постоянными магнитами; Is представляет собой фазный ток, который также является синусоидальным и проходит через каждую из трех обмоток.
Вектор Vs представляет приложенное напряжение, а вектор Es представляет CEMF, наведенную в каждой из трех обмоток статора.
Для удобства модули векторов Es, Vs, Is идентифицированы в качестве пиковых значений величин, к которым они относятся.
CEMF Es является функцией температуры Tmag магнитов, поскольку она пропорциональна остаточной индукции Br используемых постоянных магнитов, которая, в свою очередь, зависит от температуры магнитов, причем если αmag является коэффициентом вариации температуры постоянных магнитов при остаточной индукции, то применяется следующее соотношение:
ES(Tmag)=ES0·[1+αmag·(Tmag-T0mag)],
где ES0 является CEMF при эталонной температуре T0mag магнитов.
Продольная ось d сориентирована по направлению потока Φr ротора, и поперечная ось q образует угол 90° с продольной осью d.
На основании закона электромагнитной индукции (e=dϕ/dt) наведенная CEMF Es в обмотке статора всегда направлена по поперечной оси q, то есть она опережает по фазе на 90° относительно потока Φr ротора.
Напряжение Vs, приложенное приводным устройством к обмоткам статора, представлено, как указано выше, вектором Vs.
Электромагнитная мощность электродвигателя вычисляется по формуле 3Eslscos(γ), где γ - угол между Es и Is (γ является положительным, если Is опережает Es).
КПД электродвигателя 2 является максимальным, когда при равных условиях мощности Is является минимальным, cos(γ)=1 и γ равен нулю. Данное условие означает, что CEMF Es и ток Is находятся в фазе, как показано на фиг.4.
Электроприводной модуль 1 выполнен с возможностью управления устройством с низкими динамическими характеристиками, причем, в показанном примере, без какого-либо ограничения объема правовой охраны изобретения, устройство образовано вентилятором 7.
Приводной модуль содержит шунт Rsh с низким индуктивным сопротивлением, соединенный, как показано на фиг.1, с тремя ветвями инвертора 3, причем шунт выполнен так, что через него протекают токи, циркулирующие на инверторе, как это описано далее более подробно.
Контроллер 8 содержит модулятор 5, управляемый посредством первого цифрового сигнала "Vs_act", представляющего амплитуду фазовых напряжений, прикладываемых к электродвигателю, и посредством второго цифрового сигнала "freq_act", представляющего частоту электрического тока фазовых напряжений, прикладываемых к электродвигателю 2.
Например, трехфазный мост 3 генерирует, посредством синусоидально-треугольной широтно-импульсной модуляции, по существу, известного типа, три напряжения с изменяемой частотой, сдвинутых по фазе на 120 электрических градусов.
Модулятор 5 генерирует, полностью обычным/стандартным образом (например, по синусоидально-треугольному методу), приводные сигналы шести бесконтактных переключателей, снабженных полевыми МОП-транзисторами, инвертора 3 из вышеупомянутых первого цифрового сигнала "Vs_act" и второго цифрового сигнала "freq_act".
В частности, первый цифровой сигнал "Vs_act" представляет амплитуду фазовых напряжений в трехфазном симметричном контуре, приложенных к электродвигателю 2, а второй цифровой сигнал "freq_act" представляет частоту электрического тока напряжений, приложенных к электродвигателю, причем данные сигналы получают, как описано более подробно ниже, путем своевременной коррекции эталонного значения частоты "freq_set" электрического тока, установленной внутри или снаружи контроллера 8, и непосредственно связанной со скоростью "N_set" вращения с использованием хорошо известного соотношения freq_set=N_set*p/120, где p - количество полюсов электродвигателя 2.
В свою очередь, "N_set" рассчитывается непосредственно из входного сигнала извне, устанавливающего необходимую скорость, введенную с использованием вышеупомянутого интерфейса для пользователя, который не показан.
Модулятор 5 рассчитывает количества включений шести полевых МОП-транзисторов Q_high_U, Q_low_U, Q_high_V, Q_low_V и Q_high_W, Q_low_W.
Амплитуда основной гармоники напряжений питания электродвигателя, представленная "Vs_act", может быть запрограммирована независимо от приводной частоты, представленной "freq_act".
До подробного описания цепей управления для "Vs_act" и "freq_act" ниже дано описание используемых коэффициентов, полученных как путем измерения некоторых физических величин, так и путем обработки на основании значений характеристических электрических параметров электродвигателя 2, удобно хранящихся в памяти контроллера 8, выполненного с возможностью реализации цепей управления.
Относительно векторной диаграммы, показанной на фиг.4, следует отметить, что возможно получить аппроксимированное выражение оптимального угла δopt опережения напряжения Vs, приложенного относительно CEMF Es.
На основе тригонометрических данных с векторной диаграммы, показанной на фиг.4, точное выражение может быть записано так:

При этом:
"электрический" КПД при нормальных условиях нагружения, определенный как Es/(Es+Rs·Is) превышает 0,9,
электродвигатель 2 используется для приведения в действие нагрузки, характеризуемой резистентным крутящим моментом, пропорциональным току, причем данный момент является нелинейной функцией скорости вращения.
Поскольку составляющая Rs·Is в различных условиях нагружения не превышает 10% от Es, то можно записать Is≅k′·ωel, и поэтому Rs·Is≅k·ωel, где  , при этом электрический импульс задан формулой ωel=ωmecc·р/2, где ωmecc - механический импульс, и p - количество полюсов электродвигателя 2.
, при этом электрический импульс задан формулой ωel=ωmecc·р/2, где ωmecc - механический импульс, и p - количество полюсов электродвигателя 2.
Правильность данной линейной аппроксимации для ωel широко проверена в технической практике для электродвигателей с высоким КПД, выполненных с возможностью приведения в действие вентиляторов и насосов, как это указано в предпочтительном случае в примере.
Как известно, CEMF Es также зависит, кроме температуры постоянных магнитов, линейно от механического импульса, который при условиях устойчивого состояния превышает электрический импульс в 2/р раза.
Это позволяет всему знаменателю точного выражения tgδopt также считаться пропорциональным ωel, вследствие чего обеспечивается возможность упрощения точного выражения путем введения удобного поправочного коэффициента Kcorr (больше 1, как правило, менее 1, 2, что устанавливается опытным путем), как показано ниже:

где KE представляет константу CEMF, измеренную в В/(об/мин), и p представляет количество полюсов.
Следует отметить, что зависимость от ωel исчезает в упрощенном выражении.
Если влияние температуры постоянных магнитов на CEMF Es учитывается посредством коэффициента αmag вариации температуры постоянных магнитов при остаточной индукции, то необходимо ввести линейную зависимость константы KE CEMF от температуры магнитов согласно выражению:
KE(Tmag)=KE0·[1+αmag·(Tmag-T0mag)]
где KE0 является константой CEMF при эталонной температуре T0mag постоянных магнитов, и, как уже упоминалось, αmag является коэффициентом вариации температуры постоянных магнитов при остаточной индукции (αmag=-0,1%/K для магнитов из Nd-Fe-B).
Данная составляющая особенно важна при наличии широкой вариабельности температуры окружающей среды (например, от -40°C до 120°C для электрических вентиляторов, образующих часть радиаторных систем охлаждения для двигателей, работающих в условиях термического нагружения).
Поскольку на практике значение угла δopt, как правило, меньше 30 электрических градусов, то возможно аппроксимировать тангенс угла самим углом и, таким образом, записать:

Другими словами, если падение напряжения Rsls на активном сопротивлении пренебрежимо мало относительно Es, и тангенс угла δopt опережения может быть аппроксимирован самим углом, то можно сказать, что на практике угол δopt опережения линейно зависит от фазного тока Is и от температуры Tmag постоянных магнитов, как описано в вышеупомянутом упрощенном соотношении.
Контроллер 8 содержит ступень 9, известную как "gain_lpk", для расчета угла δopt опережения напряжения Vs, приложенного к электродвигателю 2 относительно CEMF Es, как линейной функции пикового значения фазного тока Is.
Согласно первому варианту осуществления изобретения приводной модуль 1 содержит температурный датчик 10, расположенный вблизи постоянных магнитов и сообщающийся со ступенью 9 "gain_lpk" для предоставления ступени 9 информации относительно температуры постоянных магнитов.
Ступень 9 выполнена с возможностью расчета угла δopt опережения как линейной функции пикового значения фазного тока Is согласно следующему уравнению:

где, как указано, "Ls" является синхронным индуктивным сопротивлением электродвигателя, выраженным в Генри, "р" является количеством полюсов электродвигателя, "KE0" является константой CEMF при эталонной температуре "T0mag" постоянных магнитов, "αmag" является коэффициентом вариации температуры постоянных магнитов при остаточной индукции, "Tmag" является температурой постоянных магнитов, измеренной температурным датчиком 10.
В других вариантах осуществления изобретения вышеупомянутая формула для расчета δopt может использоваться при αmag=0, устраняя, таким образом, зависимость выражения от температуры.
Для того чтобы обеспечить пропорциональность вышеупомянутого сигнала току Is на входе ступени 9 "gain_lpk", приводной модуль 1 содержит вышеуказанный модуль 11 недорогого типа и полностью аналогового типа, выполненный для измерения пикового значения фазного тока Is, причем данный модуль известен как "pk_detect".
Аналоговый модуль 11 получает, за пределами контроллера 8, сигнал напряжения, присутствующий на шунте Rsh, в качестве входного сигнала, и возвращает, в качестве выходного сигнала, аналоговый сигнал, уровень которого прямо пропорционален амплитуде тока, проходящего через шунт Rsh. Аналоговый модуль 11, изображенный схематично, описан в публикации ЕР 2195916, на которую в данном документе сделана ссылка во всей полноте для полноты описания.
Ступень 9 "gain_lpk" расположена, как упомянуто выше, в контроллере 8 и выполняет следующие операции:
- аналогово-цифровое преобразование аналогового сигнала, пропорционального току Is на выходе со ступени "pk_detect" с временным интервалом между двумя последовательными выборками предпочтительно менее 1/100 от минимального электрического периода;
- поиск максимума среди значений, считанных в течение каждого электрического периода;
- использование максимального значения, обнаруженного для расчета δopt, по формуле, определенной выше.
Аналоговый модуль 11 "pk_detect" и ступень 9 "gain_lpk" образуют первую аналого-цифровую ступень 6 для расчета оптимального значения δopt угла опережения напряжения Vs, приложенного относительно CEMF Es.
Как показано на фиг.3b, угол между приложенным напряжением Vs и фазным током Is известен как ϕ и является положительным, когда Vs опережает Is.
При указании положительного δ, когда напряжение Vs опережает CEMF Es, и положительного γ, когда Is опережает CEMF Es, может быть записано основное соотношение, связывающее три угла, которое может быть получено при рассмотрении фиг.3b, то есть:
γ=δ-ϕ.
Оптимальная стратегия управления, реализованная в контроллере 8, обеспечивает независимое управление приложенным напряжением Vs и частотой электрического тока, приложенной к электродвигателю 2.
Оптимальное функционирование приводного модуля 1 достигается, как подробно описано ниже, путем расчета только угла "γ", отобранного при частоте электрического тока.
Более конкретно, оптимальный КПД достигается при γ=0 и при минимальном поглощении тока.
В первом варианте осуществления данного изобретения управление напряжением питания осуществляется независимо от контроля стабильности электродвигателя, то есть независимо от частоты.
Управление напряжением выполняется так, что напряжение питания изменяется таким образом, что "γ" равен 0, как описано подробно ниже.
В расчете γ, выполненном контроллером 8, используется вышеупомянутое соотношение между δ и ϕ, где δ заменен оптимальным значением вышеупомянутого угла δopt, рассчитанным контроллером 8, а ϕ измерен, таким образом:
γact=δopt-ϕact.
На практике, в данном решении "γ" не измеряется непосредственно, поскольку это привело бы к дорогостоящим решениям, но получается путем "непрямого" расчета δopt и прямого измерения ϕact.
Таким образом, приводной модуль 1 содержит вторую аналоговую/цифровую ступень 12 для измерения угла ϕact между напряжением Vs, приложенным к электродвигателю, и фазным током Is.
Для достижения преимущества контроллер 8 запрограммирован для определения, с выборкой при частоте электрического тока, угла γact между фазным током Is и противоэлектродвижущей силой Es как разницы между оптимальным значением угла δopt опережения по фазе и углом ϕact между напряжением Vs, приложенным к электродвигателю и фазным током Is, измеренным измерительной ступенью 12.
При более подробном описании контроллер 8 содержит первый вычитающий узел 13, сообщающийся с первой аналоговой/цифровой ступенью 6 для приема, в качестве входного сигнала, оптимального значения угла δopt опережения, и со ступенью 12 для измерения угла ϕact для расчета разницы между δopt и ϕact и получения γact.
Первая задача электроприводного модуля 1 состоит в поддержании оптимального КПД электромеханического преобразования.
Как показано на фиг.1, контроллер 8 содержит интегратор 14, имеющий константу Ki интегрирования, выполненный для интегрирования угла "γact" между фазным током Is и противоэлектродвижущей силой Es и определения первого цифрового сигнала "Vs_act".
Другими словами, оптимальное управление приложенным напряжением основано на рассчитанном угле "γact".
Операция интегрирования, выполнения интегратором 14, разницы "δopt-ϕact" такова, что разница "δopt-ϕact" становится равной нулю в условиях устойчивого состояния.
На практике операция интегрирования гарантирует, что в условиях устойчивого состояния "δopt=ϕact" и, как следствие, "Vs_act" устанавливается на значении, согласуемом с векторной диаграммой, показанной на фиг.4, относительно оптимального функционирования схемы, показанной на фиг.2, то есть минимального фазного тока для получения определенного крутящего момента.
Предпочтительно, операция интегрирования выполняется в цифровом формате контроллером 8.
На практике управление происходит путем измерения пиковой фазы 1 (из которой получают δopt) и измерения угла "ϕact”.
Комбинация "δopt" и “ϕact” дает "γact", который после интегрирования предоставляет напряжение питания.
Вторая задача состоит в стабилизации приводного модуля 1.
Контроллер 8 запрограммирован для расчета вышеупомянутого второго цифрового сигнала "freq_act" как разницы между значением эталонной частоты "freq_set" и поправочным коэффициентом Δfreq, пропорциональным углу "γact" между фазным током Is и противоэлектродвижущей силой Es.
Частота "freq_set" устанавливается снаружи контроллера 8 посредством вышеупомянутого интерфейса для управления или внутри контроллера 8, как подробно описано ниже.
Контроллер 8 содержит первый расчетный модуль 15, выполненный для расчета частоты "freq_set".
Контроллер 8 содержит второй расчетный модуль 16, принимающий, в качестве входного сигнала, угол "γact" между фазным током Is и противоэлектродвижущей силой Es для применения константы Kp пропорциональности для получения поправочного коэффициента "Δfreq", пропорционального углу "γact".
Контроллер 8 содержит второй вычитающий узел 17, сообщающийся с первым расчетным модулем 15 для приема, в качестве входного сигнала, значения "freq_set", и со вторым расчетным модулем 16 для приема, в качестве входного сигнала, поправочного коэффициента "Δfreq", и расчета второго цифрового сигнала "freq_act" как разницы между значением "freq_set" и значением поправочного коэффициента "Δfreq".
Из литературы известно (см., например, A Sensoriess, Stable V/f Control Method for Permanent-Magnet Synchronous Motor Drives" - IEEE Transactions on Industry Applications, vol. 39, no. 3, May/June 2003), что синусоидальные приводные модули на основе приложения напряжения и частоты к приводам синхронного электродвигателя с постоянными магнитами демонстрируют "системную" нестабильность скорости вращения, что можно показать путем анализа уравнений, описывающих динамические характеристики электродвигателя - уравнения напряжения и уравнения крутящего момента.
Нестабильность проявляет себя в колебаниях угла "δ" при хорошо определимой частоте, зависящей от инерционности нагрузки, KE двигателя и его синхронного индуктивного сопротивления Ls. При этом было продемонстрировано, что путем модуляции частоты, приложенной пропорционально возмущениям входной мощности двигателя, колебания угла "δ" погашаются.
Согласно данному изобретению, колебания угла "δ" погашаются, то есть стабилизирующий эффект достигается путем введения пропорциональной поправки "Δfreq" в "γact" частоты "freq_set" согласно константе Kp пропорциональности.
Поправка вносится через второй вычитающий узел 17 (см. фиг.1).
Поскольку "γact" получен посредством простой выборки при частоте электрического тока, то, в отличие от уровня техники, в качестве контроллера может быть использован дешевый микроконтроллер на 8 бит.
Поскольку в условиях устойчивого состояния "γact" стремится к нулю, устанавливая оптимальное управление приложенным напряжением Vs как описано выше, то приводной модуль 1 гарантирует, что скорость, установленная при помощи вышеуказанного внешнего интерфейса, не изменяется на поправочный коэффициент "Δfreq" при стационарных условиях (устойчивое состояние).
Рассматривая более подробно аналоговую/цифровую ступень 12 для измерения угла ϕact между напряжением Vs, приложенным к электродвигателю, и фазным током Is, следует отметить, что данная ступень содержит аналоговый модуль 18, известный как "zc_E-I_detect", для детектирования перехода через ноль тока первой фазы электродвигателя 2, например фазы, обозначенной U, и цифровой модуль 19, известный как "fi_calc", внутри контроллера 8.
Аналоговый модуль 18 генерирует, в качестве выходного сигнала, третий цифровой сигнал "zc_E-I_phaseU", переход которого, выполненный по типу "высокий-низкий", определяет, в первой рабочей конфигурации, описанной далее более подробно, переход через ноль тока в первой фазе U.
Как показано, в частности, на фиг.1 и 5, приводной модуль 1 содержит внутри контроллера 8, предпочтительно для функций, описанных подробно далее, разрешающий модуль 20 аналогового модуля 18.
Разрешающий модуль 20 генерирует высокий или низкий разрешающий сигнал “zce_run_on_fly".
Имеется вышеупомянутая первая рабочая конфигурация аналогового модуля 18, когда разрешающий сигнал "zce_run_on_fly" является высоким, а также вторая рабочая конфигурация аналогового модуля 18, когда разрешающий сигнал "zce_run_on_fly" является низким.
Согласно показанному варианту осуществления изобретения, когда разрешающий сигнал "zce_run_on_fly" сохраняется в значении "высокий", в первой рабочей конфигурации, аналоговому модулю 18 дано разрешение на считывание перехода через ноль фазного тока Is.
Когда разрешающий сигнал "zce_run_on_fly" сохраняется в значении "низкий", во второй рабочей конфигурации, аналоговому модулю 18 дано разрешение на считывание перехода через ноль противоэлектродвижущей силы.
Первое и второе рабочие состояния описаны более подробно ниже.
Контроллер 8 содержит первое девиаторное программное обеспечение sw1 для управления разрешающим модулем 20.
Первое девиаторное программное обеспечение sw1 управляется посредством пятого цифрового сигнала "bridge_enabled", генерируемого контроллером 8.
Низкий логический уровень "zce_run_on_fly" активируется, только если контроллер 8 проверил, что модулятор 5 не управляет любым из шести полевых МОП-транзисторов Q_high_U, Q_low_U, Q_high_V, Q_low_V и Q_high_W, Q_low_W трехфазного моста 3, и наоборот, когда разрешающий сигнал "zce_run_on_fly" является высоким.
Как показано на фиг.5, аналоговый модуль 18 содержит первый вход, сообщающийся с электродом "d" стока низковольтного полевого МОП-транзистора Q_low_U, являющегося частью питающей ветви инвертора 3 первой фазы U электродвигателя 2, второй вход, сообщающийся с электродом "s" истока низковольтного полевого МОП-транзистора Q_low_U, третий вход, сообщающийся с электродом "g" затвора низковольтного полевого МОП-транзистора Q_low_U, и четвертый разрешающий вход, сообщающийся с разрешающим модулем 20 для приема разрешающего сигнала "zce_run_on_fly".
В основном входными сигналами аналогового модуля "zc_E-I_detect" являются:
- напряжение стока-истока одного из низковольтных полевых МОП-транзисторов (Q_low_U на фиг.1);
- напряжение затвора полевого МОП-транзистора Q_low_U,;
- разрешающий сигнал, известный как "zce_run_on_fly".
Как упомянуто выше, аналоговый модуль 18 предназначен для детектирования переходя через ноль тока первой фазы U электродвигателя 2 в соответствии с падением напряжения между первым и вторым входами, когда разрешающий сигнал является высоким.
Как показано на фиг.5, аналоговый модуль 18 содержит исключительно дешевые компараторы.
В предпочтительном варианте осуществления изобретения, показанном для примера, аналоговый модуль 18 содержит первый компаратор "СОМР_1", второй компаратор "СОМР_2" и третий компаратор "СОМР_3".
Как упомянуто выше, аналоговый модуль 18 генерирует, в качестве выходного сигнала, цифровой сигнал "zc_E-I_phaseU", переход которого, выполненный по типу "высокий-низкий", выполнен для определения перехода (zc) через ноль тока в одной из фаз электродвигателя (на функциональной схеме, показанной на фиг.1, это ток в фазе U) в первой рабочей конфигурации.
Первый и второй компараторы "СОМР_1" и "СОМР_2" имеют свои выходы, выполненные по типу "свободный коллектор" и замкнутые накоротко, причем они обеспечивают выход в формате логическое "И" (AND). Первый компаратор "СОМР_1" считывает падение напряжения в полевом МОП-транзисторе Q_low_U как при его работе, когда показание падения напряжения пропорционально току, так и при его модулировке, когда показание падения напряжения теряет любую корреляцию с током, циркулирующим в фазе U.
Общий выход первого и второго компараторов "СОМР_1", "СОМР_2" обозначен "ZC".
Второй компаратор "СОМР_2", соединенный в логическом "И" с "СОМР_1", и приводимый в действие сигналом затвора полевого МОП-транзистора, устраняет, на выходе ZC, показания нежелаемой части падения напряжения на полевом МОП-транзисторе Q_low_U, оставляя для третьего компаратора "СОМР_3" только функцию фильтра, пропускающего нижние частоты, и компаратора гистерезиса.
Таким образом, третий компаратор "СОМР_3" определяет переход через ноль тока с высоким отношением "сигнал-шум".
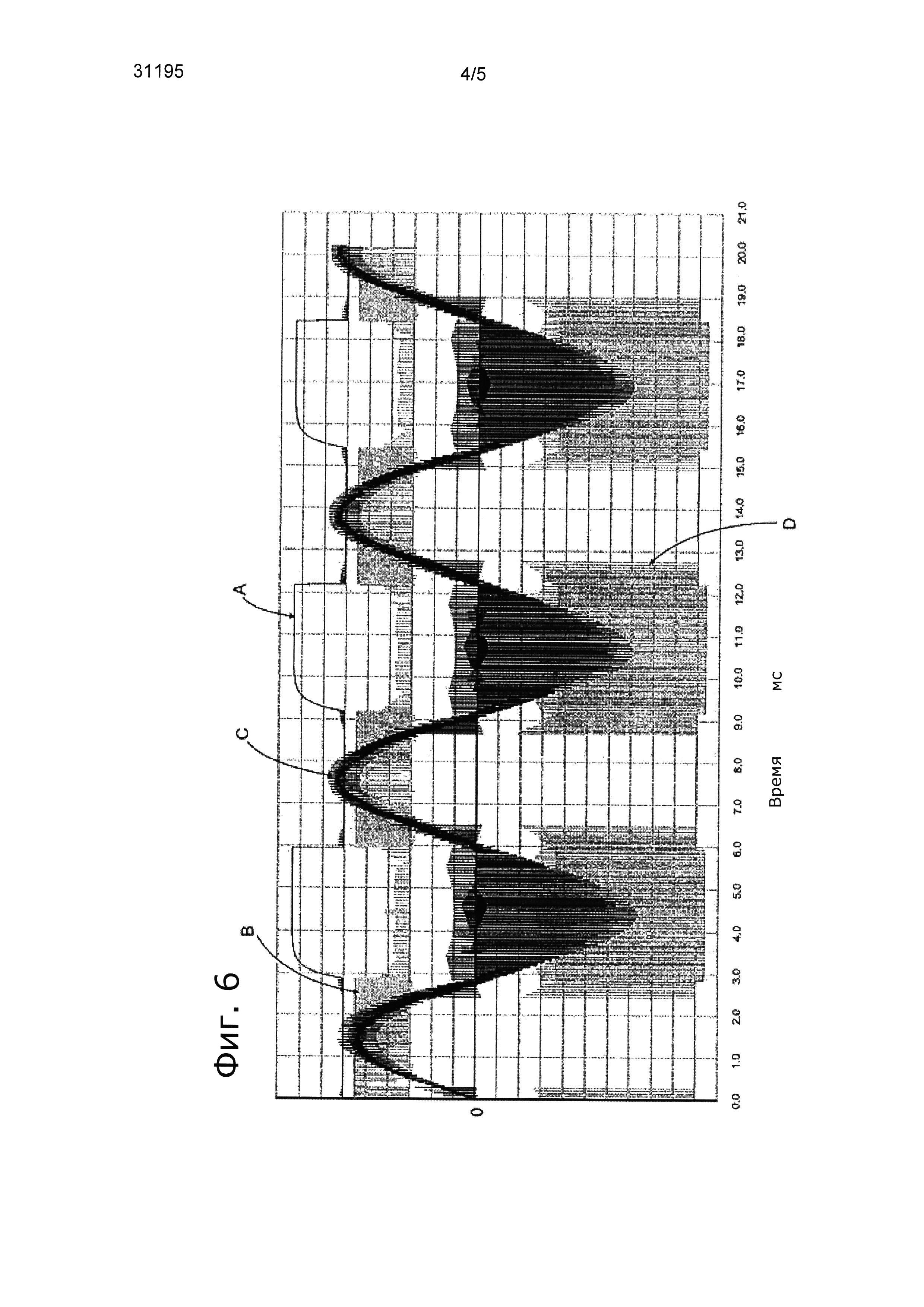
Диаграмма сигналов (напряжений и токов), полученных из моделирований схем, которые описывают функционирование цепи, показана на фиг.6.
Кривая "А" описывает кривую перехода через ноль, то есть сигнал "zc_E-I_phaseU", в частности переход через ноль в текущей фазе.
Кривая "В" описывает кривую вышеупомянутого сигнала ZC на общем выходе "COMP_1" и "СОМР_2".
Кривая "С" описывает ток, протекающий через полевой МОП-транзистор Q_low_U, являющийся положительным при работе полевого МОП-транзистора.
Кривая "D" описывает напряжение Vds на полевом МОП-транзисторе Q_low_U.
На практике аналоговый модуль 18 выполняет синхронизированное считывание на электроде затвора полевого МОП-транзистора Q_low_U.
Использование напряжения стока-истока на низковольтном полевом МОП-транзисторе Q_low_U предоставляет, в первой рабочей конфигурации, знак тока фазы U.
Выполненное считывание является дифференциальным считыванием "виртуальной земли", поскольку оно выполняется на низковольтном полевом МОП-транзисторе Q_low_U.
Следует отметить, что, таким образом, для определения переходов тока через ноль нет необходимости ни в датчиках на эффекте Холла, ни в синфазных усилителях.
Как показано на фиг.5, в варианте осуществления изобретения, изображенном для примера, аналоговый модуль 18 "zc_E-I_detect" содержит, последовательно с неинвертирующим входом "СОМР_1", соединенным со стоком Q_low_U, резистор Rd и защитную цепь 21, образованную двумя диодами, соединенными в антипараллель.
Инвертирующий вход "СОМР_1" имеет в последовательном соединении резистор Rs и защитную цепь 22, также образованную двумя диодами, соединенными в антипараллель.
Модуль 18 содержит резистор Rg в последовательном соединении с неинвертирующим входом второго компаратора "СОМР_2" и нагрузочный повышающий резистор.
На общем выходе "СОМР_1" и "СОМР_2" также предусмотрен нагрузочный повышающий резистор R6.
Компаратор "СОМР_3" установлен, согласно уровню техники, не описанному в данном документе, для образования, как упомянуто выше, компаратора гистерезиса.
Вышеупомянутый цифровой модуль 19 содержит таймер 26 и сообщается с выходом аналогового модуля 18 для получения, в качестве входного сигнала, третьего цифрового сигнала "zc_E-I_phaseU".
Цифровой модуль 19 сообщается с вышеупомянутым модулятором 5 для приема, в качестве входного сигнала, четвертого цифрового сигнала "zc_V_phaseU", переход которого, выполненный по типу "высокий-низкий", определяет переход через ноль напряжения, приложенного к первой фазе U электродвигателя 2.
Цифровой модуль 19 измеряет, посредством таймера 26, период "Тϕ" времени между переходом через ноль напряжения, приложенного к первой фазе, и перехода через ноль тока в первой фазе, из сигнала "zc_E-I_phaseU", и получает угол ϕact между напряжением Vs, приложенным к электродвигателю 2, и фазного тока Is из измерения периода "Тϕ" времени на основании второго цифрового сигнала, по формуле: ϕact=2·π·freq_act·Tϕ.
Если в предыдущей формуле "freq_act" выражена в Гц и "Тϕ" в секундах, то "ϕ" выражается в "электрических" радианах.
Другими словами, находящийся в контролере 8 цифровой модуль 19 принимает, в качестве входного сигнала, цифровой сигнал "zc_E-I_phaseU" и измеряет, посредством таймера 26, период "Тϕ" времени между переходом через ноль фазового напряжения, приложенного к фазе U, и переходом через ноль тока в фазе U (переход по типу "высокий-низкий" сигнала "zc_E-I_phaseU"). При этом момент перехода через ноль напряжения, приложенного к фазе U, получают посредством традиционных методов внутри модулятора 5: угол "ϕact" выводят из измерения вышеупомянутого периода времени на основании значения частоты электрического тока, обозначенной "freq_act", согласно вышеупомянутой формуле.
Существуют рабочие условия, при которых вышеупомянутый вентилятор 7 вращается в направлении, соответствующем направлению при нормальной эксплуатации, даже если двигатель 2, приводящий его в движение, не находится под напряжением. В данных условиях может быть запрошена так называемая функция "поймать вращение ротора".
Чтобы избежать появления чрезвычайно вредных переходных экстратоков (например, в случае форсированного повторного запуска электродвигателя от нулевой скорости), приводной модуль 1 имеет систему для считывания CEMF.
Для обеспечения данного считывания приводной модуль 1 содержит дополнительный резистор, известный как "Rzc_fcem_run_on_fly", со значением, равным Rd, на фазе с задержкой в 120 электрических градусов (фаза W на схеме, показанной на фиг.1), относительно которой и на которой происходит считывание перехода тока через ноль (фаза U в случае данного примера).
Если запрашивается функция "поймать вращение ротора", то входной сигнал "zce_run_on_fly" ступени "zc_E-I_detect" управляется на "низком" логическом уровне посредством девиаторного программного обеспечения "sw1", управляемого сигналом "bridge_enabled" внутри контроллера 8, образуя вышеупомянутую вторую рабочую конфигурацию аналогового модуля 18.
Было показано, с использованием схемотехнического анализа системы с трехфазным мостом 3, имеющим высокий импеданс (двигатель 2 не находится под напряжением), что переход "высокий-низкий" выходного сигнала "zc_E-I_phaseU" ступени "zc_E-I_detect" совпадает с переходом через ноль (от отрицательного к положительному) напряжения между двумя клеммами U и W (положительное, когда VU превышает VW).
Между вышеупомянутым переходом через ноль и переходом через ноль CEMF фазы U есть 30 электрических градусов, используемых для вышеупомянутых расчетов оптимального напряжения, прикладываемого при эксплуатации, когда на двигатель подано напряжение.
Другими словами, система для считывания CEMF основана на связанном считывании CEMF между фазами U и W.
Моделирование схемы, подтверждающее вышесказанное, приведено на фиг.7.
В левой части, касающейся ситуации, при которой мост 3 включен, можно видеть кривую "А", описывающую кривую перехода через ноль, то есть сигнал "zc_E-I_phaseU", в частности кривую перехода через ноль фазного тока, и кривую "С", описывающую ток, проходящий через фазу U, положительный при выходе из двигателя.
В правой части, в которой мост 3 выключен или в него не подано напряжение (кривая "С" при нуле), кривая "А" представляет кривую сигнала "zc_E-I_phaseU", представляющую переходы CEMF через ноль.
Сигнал "zc_E-I_phaseU", который можно использовать для определения перехода CEMF через ноль для мягкой "ловли вращения ротора", является тем же сигналом, используемым для определения перехода через ноль фазного тока, когда "bridge_enabled" находится на "высоком" логическом уровне.
В правой части диаграммы, показанной на фиг.7, также изображена кривая "G", представляющая кривую CEMF, связанную между фазами U и W, кривая "Н", представляющая кривую напряжения стока-истока в полевом МОП-транзисторе Q_low_U с выключенным мостом 3, и кривая "L", представляющая кривую CEMF Es фазы U.
В случае вентилятора 7, вращающегося в направлении, соответствующем направлению при нормальной эксплуатации, и питающего двигатель 2 при его вращении, когда напряжение не подано, то есть когда он выполняет вышеуказанную функцию "поймать вращение ротора" с получением плавного ускорения, необходимо:
- приложить начальное напряжение Vs. равное CEMF, созданной двигателем, на который не подано напряжение;
- приложить начальную частоту, соответствующую скорости вращения двигателя в момент подачи напряжения.
Вышеупомянутый расчетный модуль 15 содержит модуль 24, известный как "freq_calc" и находящийся в контроллере 8, для определения значения "freq_set", применяемого в случае использования функции "поймать вращение ротора".
Модуль 24 принимает, в качестве входного сигнала, сигнал "zc_E-I_phaseU" из аналогового модуля 18.
Модуль "freq_calc" содержит таймер 25 для измерения времени Tfly между двумя последовательными переходами "высокий-низкий" сигнала "zc_E-I_phaseU".
Модуль "freq_calc" рассчитывает частоту F_fly=1/Tfly, соответствующую вышеупомянутому времени для приложения рассчитанной величины, обозначенной "freq_fly", в качестве начального значения "freq_set" для случая применения функции "поймать вращение ротора".
Как показано, приводной модуль 1 содержит второе девиаторное программное обеспечение sw2, управляемое посредством сигнала "bridge_enabled" для придания значения "freq_fly" частоте "freq_set" в случае, в котором мост 3 выключен. Когда мост 3 включен, "freq_set" соответствует значению, установленному вышеупомянутым внешним интерфейсом - "freq_set_run".
При наличии вышеупомянутого вычитающего узла 17, во избежание нежелательных переходов на "freq_act", приводной модуль 1 содержит третье девиаторное программное обеспечение "sw3" (фиг.1), управляемое посредством сигнала "bridge_enabled" для контекстного обнуления входа второго расчетного модуля 16.
На практике цепь "zc_E-I_detect" измеряет частоту электрического тока, соответствующую скорости двигателя, к которому не приложено напряжение, и затем обеспечивает возможность синхронизации "freq_set" во избежание повторного запуска двигателя от нулевой скорости.
Имея сигнал "freq_fly" и помня о том, что память контроллера 8 хранит значение константы KE0 CEMF, температурный коэффициент αmag и эталонную температуру T0mag постоянных магнитов, а также о том, что контроллер 8 получает текущую температуру Tmag магнитов от датчика 10, контроллер 8 рассчитывает значение "Vs_act", прикладываемое первоначально.
Определив и "задействовав" начальные значения "Vs_act" и "freq_act", прикладываемые к двигателю, контроллер 8, переустановив сигнал "bridge_enabled" на "высокий", способен возвращать разрешающий сигнал "zce_run_on_fly" на логический уровень "высокий" и выполнять вышеупомянутые операции по оптимальному и стабильному запуску в действие (операция интегрирования γact для достижения оптимального напряжения и восстановления пропорционального действия с γact для поправки "freq_set" в целях стабильности). Наличие вышеупомянутого резистора "Rzc_fcem_run_on_fly" никак не влияет на функционирование системы, когда "zce_run_on_fly" находится на логическом уровне "высокий", и не приводит к какому-либо избыточному дополнительному поглощению тока приводного устройства, когда для приводного устройства нет необходимости запускать управляющее воздействие "freq_set_run".

Электрический привод и способ управления им
Электрическая машина
Вращающаяся электрическая машина и способ ее сборки
Электрическая машина и способ производства
Осевой вентилятор
Электрическая машина вращательного действия и соответствующий способ сборки
Ротор для электрической машины и соответствующий способ сборки
Центробежный вентилятор
Кожух
Вентилляционный блок
Электрический привод и способ управления им
Электрическая машина
Вращающаяся электрическая машина и способ ее сборки
Электрическая машина и способ производства
Осевой вентилятор
Электрическая машина вращательного действия и соответствующий способ сборки
Ротор для электрической машины и соответствующий способ сборки
Центробежный вентилятор
Кожух
Вентилляционный блок

