Результат интеллектуальной деятельности: СПОСОБ ИНТЕГРАЦИИ СИСТЕМ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и предназначено для интеграции друг с другом гидроакустических систем обнаружения шумящих в море объектов, находящихся на одном носителе.
Задача интеграции гидроакустических систем обнаружения всегда ставилась разработчиками аппаратуры [1]. Системы, работающие в разных диапазонах частот, имеющие различные приемные антенны и (или) способы обработки информации, оптимизированы под обнаружение различных частей единого гидроакустического сигнала, и их интеграция позволит получить наиболее полную информацию о шумящем в море объекте. Например, одна система обнаруживает широкополосные непрерывные шумовые сигналы в звуковом диапазоне частот, другая система обнаруживает узкополосные шумовые сигналы в инфразвуковом диапазоне частот, третья система обнаруживает импульсные детерминированные сигналы в ультразвуковом диапазоне частот. Тогда интеграция информации этих систем позволит определить для одного объекта наличие или отсутствие шумовых и детерминированных составляющих сигнала в разных диапазонах частот с различной повторяемостью во времени.
Известны два основных подхода к решению задачи интеграции систем [2]. Согласно первому, интеграция осуществляется на конечном этапе обработки информации с использованием формулярных данных об обнаруженных объектах. Согласно второму, интеграция осуществляется на этапе первичной обработки информации до обнаружения объектов с использованием массивов сигнальной информации, элементы которых соответствуют угловым направлениям характеристик направленности в горизонтальной плоскости.
Известны способы интеграции формулярной информации [3, 4], согласно которым на основании совокупности общих оценок параметров производится отождествление формуляров объектов, обнаруженных в разных системах. Теоретический анализ показывает высокую эффективность этих способов интеграции. Однако на практике перечень общих параметров в формулярах разных систем ограничен и часто состоит из одного параметра - направления на цель. Это приводит к общему недостатку способов интеграции формулярной информации, который заключается в их низкой эффективности на практике. Кроме того, интеграция формулярной информации возможна только для объектов, обнаружение которых уже проведено во всех системах.
Интеграция на этапе первичной обработки дополнительно к расширению перечня информации о свойствах уже обнаруженных объектов позволяет, в некоторых случаях, снизить порог обнаружения и обнаруживать более слабые цели. Это связано с тем, что требуемая для обнаружения повторяемость сигнала в рамках одной системы обеспечивается накоплением во времени, а в рамках интегрированной системы может обеспечиваться накоплением в пространстве свойств сигнала в одном угловом направлении. В связи с этим интеграция на этапе предварительной обработки предпочтительна.
Известны способы интеграции массивов сигнальной информации [5, 6]. Согласно этим способам объединяется несколько массивов сигнальной информации, полученных от одной приемной антенны для разных частотных диапазонов или разных углов наклона характеристик направленности в вертикальной плоскости для общего статического веера характеристик направленности в горизонтальной плоскости. Индикация массивов сигнальной информации осуществляется на едином поле индикатора. Способы [5, 6] применяются только для интеграции систем, работающих с использованием общей антенны, что является их существенным недостатком. Кроме того, смешение цветов приводит к получению нового качества только при наличии не более трех цветов (обычно красный, зеленый, синий), что ограничивает количество систем, подлежащих интеграции.
Наиболее близким аналогом по решаемым задачам и используемым принципам работы к предлагаемому изобретению является способ интеграции систем обнаружения шумящих в море объектов [7], который принят за прототип.
В способе-прототипе выполняются следующие операции:
принимают гидроакустический шумовой сигнал несколькими системами с одной или несколькими антеннами, находящимися на общем носителе;
осуществляют в каждой системе частотно-временную обработку сигнала с формированием одинакового веера характеристик направленности;
формируют в каждой системе для общего сектора обзора индикаторные массивы, элементами которых является сигнальная информация с выхода каждой характеристики направленности;
осуществляют поэлементное сложение индикаторных массивов информации всех систем;
отображают полученный объединенный индикаторный массив на индикаторе;
обнаруживают шумящий объект по наличию локального максимума в объединенном индикаторном массиве.
Явным недостатком способа-прототипа является необходимость наличия абсолютно идентичной структуры индикаторных массивов. Массивы должны быть одного размера с единым шагом между элементами. Это приводит к необходимости формирования идентичного веера характеристик направленности во всех интегрируемых системах. Это часто не достижимо, поскольку параметры характеристик направленности определяются формой и размерами антенны, а также диапазоном частот принимаемого сигнала. Операция поэлементного суммирования способа-прототипа допустима только для массивов, обладающих элементами одинаковой размерности, что предполагает идентичную частотно-временную и прединдикаторную (центрирование и нормирование) обработку информации во всех интегрируемых системах, что не всегда возможно. Кроме того, как показано в работе [7], интеграция по способу-прототипу целесообразна только для примерно одинаковых по потенциалу систем обнаружения. Интеграция сильно отличающихся систем приводит к ухудшению потенциала интегрированной системы по критерию максимума отношения сигнал/помеха.
Задачей заявляемого способа является получение возможности интеграции систем, обладающих различным потенциалом по обнаружению, и не обладающих одинаковым статическим веером характеристик направленности в условиях наличия индикатора с растровой графикой, используемого в отечественной гидроакустической технике.
Для решения поставленной задачи в способ интеграции систем обнаружения шумящих в море объектов, в котором принимают гидроакустический шумовой сигнал несколькими системами с одной или несколькими антеннами, находящимися на общем носителе; осуществляют в каждой системе частотно-временную обработку сигнала с формированием веера характеристик направленности в горизонтальной плоскости; формируют в каждой системе индикаторные массивы, элементами которых является сигнальная информация с выхода каждой характеристики направленности
введены новые признаки, а именно:
частотно-временную обработку сигнала и формирование веера характеристик направленности в каждой системе производят независимо друг от друга;
формирование индикаторных массивов информации в каждой системе производят для своего сектора обзора;
формируют совокупный сектор обзора интегрированной системы, включающий в себя диапазоны секторов обзора всех интегрируемых систем;
выбирают в качестве базовой системы систему, в которой шаг по угловому направлению между элементами индикаторного массива минимален в наибольшем диапазоне углов;
назначают остальные системы подчиненными;
для каждой подчиненной системы осуществляют интерполяцию индикаторных массивов между элементами до достижения шага между элементами индикаторного массива, равного шагу индикаторного массива в базовой системе;
отображают полученные индикаторные массивы всех систем друг под другом на общем индикаторе с растровой графикой, используя общую ось углового направления для совокупного сектора обзора в горизонтальной плоскости;
обнаруживают шумящий объект и получают информацию о частотных и временных свойствах его сигнала по наличию локальных максимумов на одном угловом направлении в совокупности систем.
Интерполяцию индикаторных массивов осуществляют, например, следующим образом: дополняют индикаторный массив подчиненной системы до размера индикаторного массива базовой системы путем размножения элементов массива; осуществляют преобразование Фурье дополненного массива; выполняют поэлементное умножение массива Фурье-трансформант на оконную функцию; осуществляют обратное преобразование Фурье.
Техническим результатом изобретения является возможность интеграции любого числа систем обнаружения, обладающих различными статическими веерами характеристик направленности и различными потенциалами по обнаружению, то есть возможность интеграции систем, работающих с использованием разных антенн и осуществляющих независимую частотно-временную обработку информации. Для интегрированной системы обеспечивается возможность обнаружения сигнала на допороговом уровне и получение информации о частотных и временных свойствах сигнала шумящего в море объекта, которая может быть выявлена в совокупности интегрируемых систем.
Покажем возможность достижения указанного технического результата предложенным способом.
В заявляемом способе производят приведение индикаторных массивов различных систем к единому размеру, что необходимо для отображения этих массивов с общей осью углового направления на индикаторе с растровой графикой. При растровой графике каждому элементу массива сигнальной информации ставится в соответствие определенная группа пикселей на экране. Корректное изменение масштаба шкалы возможно только при кратном увеличении количества пикселей (в два, три, и т.д. раза). Тогда отображение разных массивов с общей осью углового направления возможно только для массивов, имеющих кратный шаг между элементами в общем секторе обзора. На практике это, чаще всего, достижимо только для систем, использующих общую антенну, когда общее расположение приемных элементов на антенне позволяет формировать характеристики направленности таким образом, что шаг между элементами индикаторных массивов кратен друг другу. Для обеспечения возможности интеграции информации, полученной системами, имеющими антенны, формирующие различные характеристики направленности в горизонтальной плоскости, в способ введена операция интерполяции данных между элементами массива. При этом в качестве базового массива используется массив сигнальной информации для системы, в которой шаг по угловому направлению между элементами массива минимален. Это обеспечивает сохранение точности оценки пеленга в наилучшей системе и возможность формирования различных вееров характеристик направленности в различных системах. Таким образом, обеспечивается интеграция систем обнаружения, обладающих различными статистическими веерами характеристик направленности, то есть работающих даже с использованием разных антенн, без ухудшения точности оценки пеленга. Объединение массивов сигнальной информации различных систем производится визуально путем их отображения с общей осью углового направления.
В заявляемом способе индикаторные массивы отдельных систем отображаются на общем индикаторе с общей осью углового направления для совокупного сектора обзора в горизонтальной плоскости. Наличие общей оси углового направления позволяет визуально отождествлять информацию разных систем, тем самым увеличивая количество информации об одном шумящем объекте. Информация интегрируемых систем в одном угловом направлении дополняет друг друга, обеспечивая накопление информации в пространстве свойств сигнала. Тогда обнаружение объекта может происходить не только по факту превышения сигналом порога в одной из систем, но и на допороговом уровне, с учетом накопления информации нескольких систем. Таким образом, для интегрированной системы обеспечивается возможность обнаружения сигнала на допороговом уровне и получение информации о шумящем в море объекте, которая может быть выявлена в совокупности интегрируемых систем.
Сущность изобретения поясняется фигурами 1, 2:
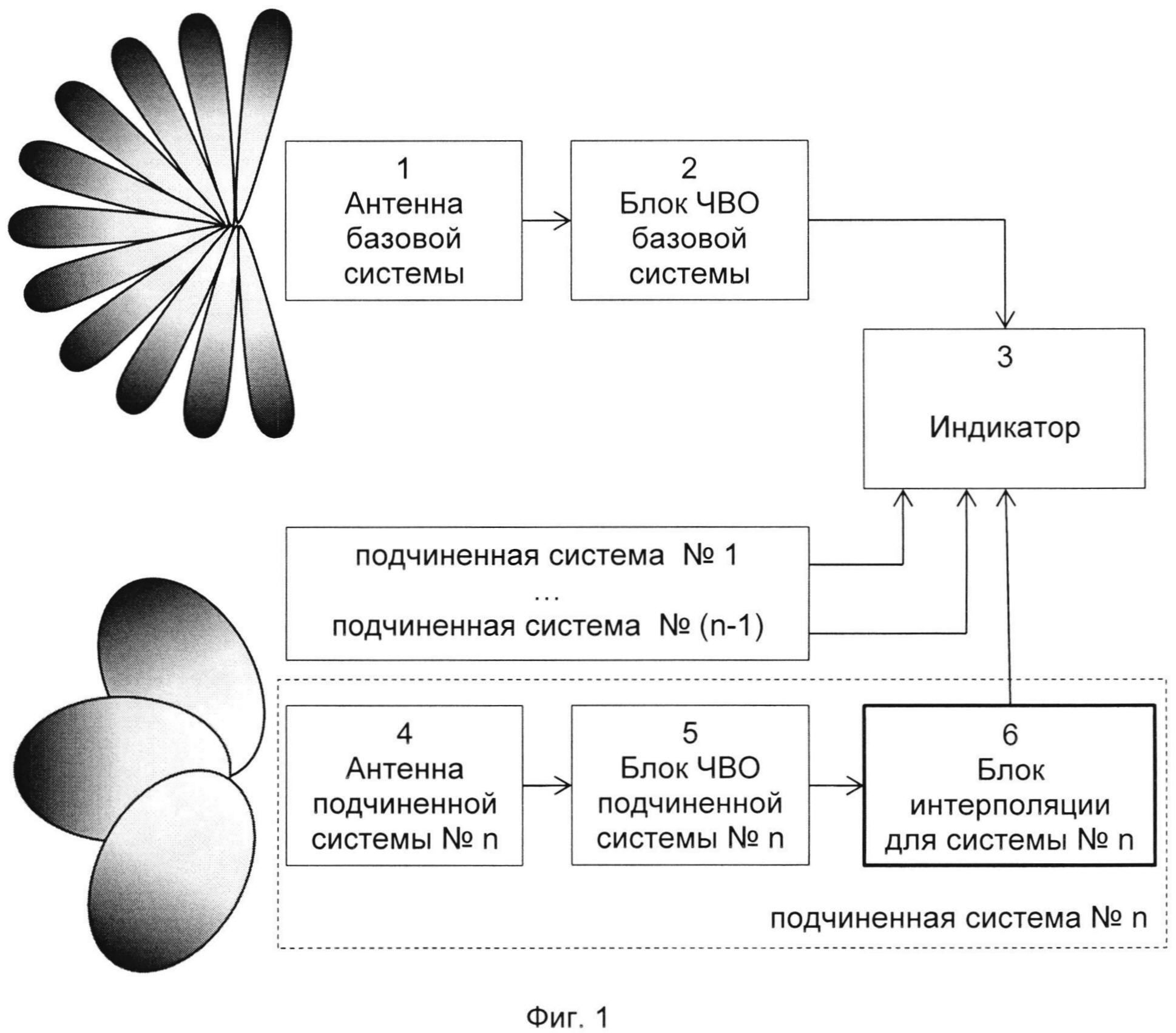
Фиг. 1 - блок-схема устройства, реализующего предлагаемый способ интеграции систем обнаружения шумящих в море объектов.
Фиг. 1 - рисунок, поясняющий, как производится обнаружение сигнала в интегрированной системе.
Предлагаемый способ технически реализуется аппаратно-программными средствами по структурной схеме, приведенной на фиг. 1, на основе обобщенной структурной схемы типовой гидроакустической системы шумопеленгования [8]. Структурная схема объединяет в своем составе два типа независимых веток обработки, заканчивающихся в едином блоке индикатора 3. Первая ветка обработки реализуется для гидроакустической системы, выбранной в качестве базовой. Выход антенны 1 базовой гидроакустической системы соединен с входом блока 2 частотно-временной обработки базовой системы, выход блока частотно-временной обработки базовой системы соединен с первым входом индикатора 3. Вторая и последующие ветки обработки реализуются для гидроакустических систем, выбранных в качестве подчиненных. Выход антенны 4 подчиненной системы n соединен с входом блока 5 частотно-временной обработки подчиненной системы n, выход блока 5 соединен с входом блока интерполяции 6 для подчиненной системы n, выход блока интерполяции 6 соединен входом n индикатора 3.
В динамике работы интегрированной гидроакустической системы предлагаемый способ реализуется следующим образом. Шумовой сигнал объекта, принятый антенной 1 базовой системы и антеннами 4 всех подчиненных систем, поступает в независимые блоки 2 и 5 частотно-временной обработки для базовой системы и для подчиненных систем, осуществляющие, в том числе, независимое формирование вееров характеристик направленности в горизонтальной плоскости и формирование независимых индикаторных массивов информации.
Далее индикаторный массив, полученный для каждой из подчиненных систем независимо, поступает в свой блок 6, где производится интерполяция индикаторного массива подчиненной системы между элементами до достижения шага между элементами индикаторного массива, равного шагу индикаторного массива в базовой системе. Шаг индикаторного массива базовой системы является постоянной величиной и закладывается в алгоритм при разработке интегрированной системы.
Интерполяция индикаторных массивов может состоять в следующем: дополняют индикаторный массив подчиненной системы до размера индикаторного массива базовой системы путем размножения элементов массива, учитывая при этом особенности индикаторных массивов обеих систем: диапазон шкал углового направления, линейность или нелинейность дискретизации шкал углового направления, однозначность или неоднозначность пеленгования; выполняют для дополненного индикаторного массива процедуру быстрого преобразования Фурье с числом отсчетов, равным ближайшей степени двойки большего размера, чем размер массива (недостающие отсчеты заполняются нулями), формируя массив Фурье-трансформант; выполняют поэлементное умножение массива Фурье-трансформант на оконную функцию Гаусса, ширина которой подбирается эвристически таким образом, чтобы в исходном пространстве ее значение соответствовало значению ширины характеристики направленности для подчиненной системы; выполняют для массива Фурье-трансформант, умноженного на оконную функцию, процедуру обратного преобразования Фурье с прежним числом отсчетов; формируют интерполированный индикаторный массив для подчиненной системы, отбрасывая по половине лишних отсчетов с каждого края полученного массива. Достоинством предлагаемой интерполяции индикаторных массивов является простота реализации и отладки, поскольку все процедуры являются стандартными и могут быть выполнены с использованием универсальных модулей программирования.
Из блока 6 полученные после интерполяции индикаторные массивы всех подчиненных систем поступают на индикатор 3 в едином темпе. Одновременно на индикатор 3 поступает индикаторный массив базовой системы. На индикаторе 3 производится единовременное отображение всех полученных индикаторных массивов друг под другом с общей осью углового направления для совокупного сектора обзора в горизонтальной плоскости. Полученная на индикаторе картина позволяет обнаруживать шумящий объект на допороговом уровне и получать наиболее полную информацию о свойствах его сигнала.
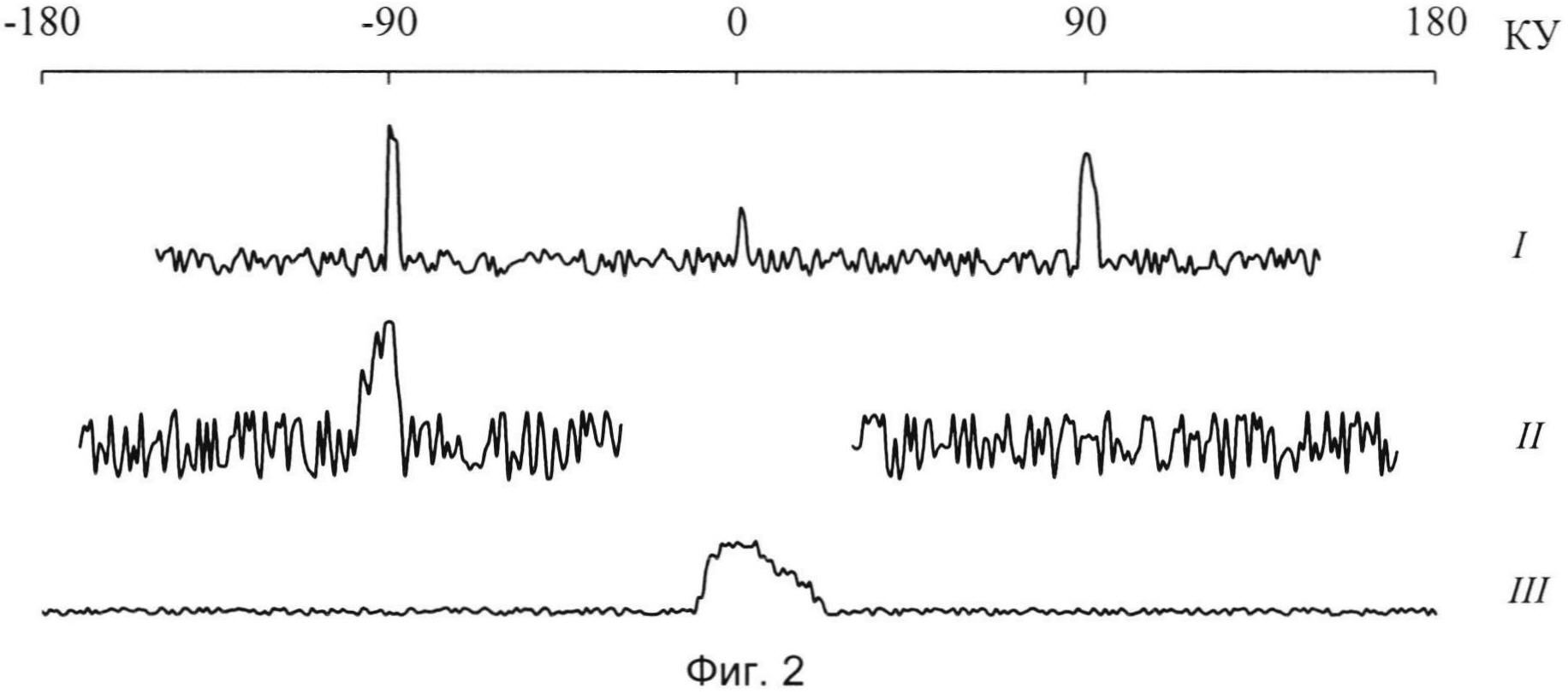
Процесс обнаружения шумящего объекта и получения информации о его свойствах поясняется фиг. 2, на которой приведена условная картина индикатора интегрированной системы, состоящей из трех систем, обозначенных I, II, III. На картине приведены сверху вниз: общая ось углового направления (КУ); индикаторный массив базовой системы I; индикаторный массив подчиненной системы II после интерполяции; индикаторный массив подчиненной системы III после интерполяции. Видно, что индикаторные массивы систем обладают своими секторами обзора. В данном случае индикаторные массивы отображаются в виде амплитудных графиков своих значений. На практике индикаторные массивы могут отображаться также в другом виде, например, яркостью цвета в виде рекордограмм во времени или в зависимости от частоты сигнала.
Все три системы оптимизированы под обнаружение различных частей единого гидроакустического сигнала. Предположим, что система I обнаруживает и оценивает параметры широкополосных непрерывных шумовых сигналов в звуковом диапазоне частот. Система II, используя другую антенну, и другую частотно-временную обработку информации, также обнаруживает и оценивает параметры шумовых широкополосных непрерывных сигналов в звуковом диапазоне частот. Достоинством системы II является возможность определения расстояния до источника сигнала, которое определяет и недостатки системы II относительно системы I, а именно более узкий частотный диапазон и меньший сектор обзора. Предположим также, что система III обнаруживает импульсные детерминированные сигналы в ультразвуковом диапазоне частот, используя для этого свою антенну и свою частотно-временную обработку информации. Совокупное использование систем I, II и III может позволить расширить сектор обзора пространства и расширить перечень информативных параметров сигнала. Обычно на практике количество систем обнаружения превышает три, поскольку диапазон свойств сигнала по частоте, времени, форме достаточно велик.
Анализируя рисунок, можно произвести обнаружение и оценку параметров трех объектов:
- в угловом направлении -90 уверенно обнаруживается объект, обладающий свойствами сигнала, выделяемыми системами I и II, но не обладающий свойствами сигнала, выделяемыми системой III. В рассматриваемом примере, про этот объект можно указать следующее: произведена оценка параметров шумоизлучения объекта в звуковом диапазоне частот, произведена оценка расстояния до этого объекта, известно, что объект не излучает импульсные детерминированные сигналы. Для объекта полностью определена информация, выделяемая системами I, II и III.
- в угловом направлении 0 уверенно обнаруживается объект, обладающий свойствами сигнала, выделяемыми системой III. В этом же угловом направлении слабо проявляются свойства сигнала, выделяемые системой I. Наличие уверенного обнаружения в системе III позволяет принять решение о допороговом обнаружении в системе I, без накопления информации во времени. При этом информация о свойствах сигнала объекта пополняется. Сектор обзора системы II не захватывает угловое направление на этот объект, следовательно, неопределенность в отношении свойств сигнала, выделяемых системой II, сохраняется. В рассматриваемом примере, про этот объект можно указать следующее: обнаружен объект, излучающий импульсные сигналы. В этом же направлении слабо проявляется широкополосный сигнал. Оператор может произвести допороговое обнаружение широкополосного сигнала, после чего будут оценены его параметры. Так как сигнал слабый, его обнаружение в системе I и получение соответствующих свойств было бы невозможно без интеграции с системой II. Оценка расстояния до объекта пока невозможна, поскольку объект находится вне сектора обзора системы II. При нахождении интегрированной системы на подвижном носителе сектор обзора может быть изменен, тогда для объекта будет полностью определена информация, выделяемая системами I, II и III.
- в угловом направлении +90 уверенно обнаруживается объект, обладающий свойствами сигнала, выделяемыми системой I, но не обладающий свойствами сигнала, выделяемыми системами II и III. В рассматриваемом примере, про этот объект можно указать следующее: обнаружен объект, шумоизлучение которого находится в звуковом диапазоне частот, однако, не в той части звуковых частот, обнаружение которых производится системой II, поэтому получение информации о расстоянии до шумящего объекта пока не представляется возможным. Понятно также, что объект не производит излучения импульсных сигналов.
Может наблюдаться ситуация, когда в одном угловом направлении присутствуют слабые сигналы допорогового уровня в нескольких системах. Такая ситуация, влекущая за собой пропуск цели в любой автономной системе, в условиях интегрированной системы привлекает к себе внимание оператора и обеспечивает возможность обнаружения слабой цели.
Необходимо отметить, что на индикаторах с растровой графикой именно введение процедуры интерполяции индикаторных массивов позволяет отображать индикаторные массивы совершенно разных систем с общей осью углового направления, что позволяет отождествлять сигналы, наблюдаемые в разных системах.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ интеграции систем обнаружения шумящих в море объектов, который может быть использован для судовых гидроакустических средств подводного наблюдения с целью увеличения состава информации о шумящих в море объектах. При этом требуемая интерполяция индикаторных массивов реализуется с помощью универсальных модулей программирования.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Андреев М.Я., Охрименко С.Н., Клюшин В.В., Рубанов И.Л., Яковлев B.А. Интегрированная система подводного наблюдения для надводного корабля // Морской сборник. 2006. №8. С. 50-51.
2. Сосулин Ю.Г. Оптимальное комплексирование обнаружителей / Прием и обработка сигналов в многоканальных и комплектованных системах. М.: МАИ, 1992. С. 5-12.
3. Нерославский Б.Л., Щеголева Н.Л. Об идентификации трассовых обнаружителей при многоканальном пеленговании // Гидроакустика. 2000. №2. C. 65-69.
4. Жандаров A.M. Идентификация и фильтрация измерений состояния стохастических систем. М.: Наука, 1979.
5. Величкин С.М., Миронов Д.Д., Антипов В.А., Зеленкова И.Д., Перельмутер Ю.С. Патент РФ №2156984 от 27.09.2000. Способ получения информации о шумящем в море объекте и способ получения цветовых шкал для него. МПК G01S 3/84.
6. Антипов В.А., Величкин С.М., Обчинец О.Г., Пастор А.Ю., Подгайский Ю.П., Янпольская А.А. Патент РФ №2353946 от 27.04.2009. Способ получения информации о шумящих в море объектах. МПК G01S 3/80.
7. Андреев М.Я., Губарев А.В., Клюшин В.В., Охрименко С.Н., Перелыгин B.C. К вопросу об интеграции систем обнаружения // Гидроакустика. 2008. №8. С. 68-74.
8. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. СПб.: Наука, 2004.
Способ определения параметров торпеды
Способ измерения параметров перемещения источника зондирующих сигналов
Устройство постановки и выборки гибкой протяженной буксируемой антенны
Способ дистанционного определения осадки, толщины и высоты льда
Гидроакустическая станция для надводного корабля
Способ определения глубины погружения объекта
Эхолот с ледовой защитой
Цифровая вычислительная машина
Способ совместной оценки дистанции до шумящего в море объекта и его шумности
Устройство постановки и выборки гибкой протяженной буксируемой антенны
Способ определения параметров торпеды
Способ измерения параметров перемещения источника зондирующих сигналов
Устройство постановки и выборки гибкой протяженной буксируемой антенны
Способ дистанционного определения осадки, толщины и высоты льда
Гидроакустическая станция для надводного корабля
Способ определения глубины погружения объекта
Эхолот с ледовой защитой
Цифровая вычислительная машина
Способ совместной оценки дистанции до шумящего в море объекта и его шумности
Устройство постановки и выборки гибкой протяженной буксируемой антенны

