Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области измерительной техники и предназначается для измерения скорости движения натурного или модельного объекта, закрепленного на каретке гидродинамического стенда и движущегося вместе с нею по рельсовому пути, что необходимо осуществлять при аттестации методик измерений, аттестации стенда в качестве испытательного оборудования и при гидродинамических испытаниях на нем объектов. Во всех упомянутых случаях актуальны требования высокой информативности и точности измерений в сочетании с простотой реализации способа и эксплуатации устройства для его осуществления.
Известен простой в реализации способ измерения скорости движения объекта, который заключается в определении времени, затраченного им на прохождение участка пути заданной длины. Он реализован, например, в устройстве для измерения скорости метаемого тела (Патент РФ на изобретение №2216025, МПК G01P 3/66, опубл. 10.11.2003). Гибкие пластины электрических контактов устанавливают по краям участка пути заданной длины, движущийся объект (метаемое тело) взаимодействует с гибкими пластинами, которые сначала замыкают первую пару контактов и тем самым включают определяющий время прибор, затем замыкают вторую пару контактов и тем самым выключают определяющий время прибор.
Однако такой способ недостаточно информативен, так как обеспечивает лишь измерение средней скорости на участке пути заданной длины.
Известен способ измерения скорости движения объекта относительно равномерно распределенных вдоль пути движения датчиков, последовательно возмущаемых при движении объекта, включающий измерение интенсивности возмущения объектом каждого и следующего за ним датчика в интервале между ними, подключение очередного следующего датчика при равенстве величин сигналов двух смежных датчиков и определение значения скорости по изменению величины сигнала ближнего к объекту датчика (Авт. св. СССР №1068818, МПК G01P 3/64, опубл. 23.01.1984). При этом расстояние между датчиками должно быть не больше допустимого, обусловленного возможностью линейного преобразования интенсивности в путь при известных дискретных промежутках времени.
Однако этот способ применительно к измерению скорости движения объекта, закрепленного на каретке, проходящей за доли секунды рабочий участок длиной несколько десятков метров рельсового пути гидродинамического стенда, обеспечивает высокую информативность лишь при использовании около сотни измеряющих интенсивность возмущения объектом сертифицированных имеющих малую динамическую погрешность датчиков, которым необходима периодическая метрологическая поверка, что усложняет эксплуатацию устройства для его осуществления. Требования ограниченности расстояния между смежными датчиками и равномерности распределения их вдоль пути движения, которые не всегда технически возможно удовлетворить, сужают возможности использования этого способа.
Известен способ измерения скорости движения объекта, принятый за прототип, по которому всю совокупность датчиков, размещенных вдоль пути движения, разделяют на N групп по n датчиков в каждой, измеряют и регистрируют время прохождения объектом участков пути между датчиками, определяют значения скорости объекта путем деления длины участка пути на время прохождения объектом этого участка как в местах размещения групп датчиков, так и в интервалах между группами, при разделении датчиков на группы устанавливают интервалы S между группами и интервалы ΔS=S/n между датчиками внутри группы, процедуру измерения и регистрации времени Δti прохождения объектом расстояния ΔS начинают с измерения интенсивности возмущения объектом каждого датчика, по достижении сигналами датчиков заданных значений формируют команду на подключение датчиков к измерительной схеме в целях измерения и регистрации (запоминания) вышеупомянутого времени, определяют значение скорости Vcp.i=ΔS/Δti в точке пути, совпадающей с местом размещения датчика, после прохождения объектом последнего датчика в данной группе подключают к измерительной схеме первый датчик данной группы и дифференциально с ним, последовательно один за другим датчики последующей группы, после подключения последнего датчика последующей группы дифференциально с ним, последовательно подключают к измерительной схеме все датчики первой группы, начиная со второго, в процессе попарной коммутации измеряют и запоминают интервалы времени Δtj между моментами равенства нулю результирующего сигнала от каждой пары дифференциально включенных датчиков, определяют значение скорости Vcp.j=ΔS/2Δtj на этих интервалах в точках пути, лежащих с шагом ΔS/2 внутри интервала S, после фиксации равенства нулю результирующего сигнала от дифференциально включенных последних датчиков первой и второй групп повторяют описанные операции для следующих групп датчиков, начиная с измерения интервалов времени между сигналами датчиков второй группы (Авт. св. СССР №1583846, МПК G01P 3/64, опубл. 07.08.1990).
Однако при использовании указанного способа для измерения скорости движения каретки гидродинамического стенда количество сертифицированных специальных датчиков сокращается лишь вдвое по сравнению с описанным ранее способом при незначительном повышении информативности. Установленные вдоль пути движения объекта датчики необходимо периодически демонтировать для метрологической поверки, что усложняет эксплуатацию устройства для его осуществления. Требования ограниченности расстояния между смежными группами датчиков и между смежными датчиками в группе сужают возможности использования указанного способа.
Задачей изобретения является создание способа измерения скорости движения объекта с высокими информативностью и точностью, с широкими возможностями использования, при этом важны простота реализации способа и эксплуатации устройства для его осуществления. Техническим результатом является повышение информативности и расширение возможностей использования.
Задача и технический результат достигаются тем, что в способе измерения скорости движения объекта, по которому всю совокупность датчиков, размещенных вдоль пути движения, разделяют на N групп по n датчиков в каждой, измеряют и регистрируют время прохождения объектом участков пути между датчиками, определяют значения скорости объекта путем деления длины участка пути на время прохождения объектом этого участка как в местах размещения групп датчиков, так и в интервалах между группами, при разделении датчиков на группы устанавливают интервалы Sj между группами, между датчиками внутри групп устанавливают интервалы ΔS(j-1)i, где (j-1) - порядковый номер группы; i - порядковый номер датчика в группе, при этом обеспечивают выполнение условий L(Sj)>>L(Sk)/(n-1) и L(Sk+1)/(n-l)<<L(Sj), где Sk - участок пути, на котором размещают (j-1)-ю группу датчиков; Sk+1 - участок пути, на котором размещают (j)-ю группу датчиков; Sj - интервал между (j-1)-й и (j)-й группами датчиков, измеряют длины L(Sj), L(ΔS(j-1)i) интервалов Sj, ΔS(j-1)i, где j=1, 2, …, N-1; i=1, 2, …, n-1, и длины комбинаций этих интервалов, на движущийся объект устанавливают точечный источник постоянного магнитного поля, вдоль пути движения устанавливают магнитоуправляемые герметизированные контакты (герконы) в качестве датчиков, измеряют электрический сигнал от датчиков и регистрируют в виде скачкообразных изменений его амплитуды (меток) во временном ряду, определяют длительности T(Δt(j-1)i), T(Δtj) временных интервалов Δt(j-1)I, Δtj, предшествующих передним или задним фронтам меток, начиная со второй, и отвечающих длинам L(ΔS(j-1)i), L(Sj) соответственно, определяют длительности комбинаций этих интервалов, определяют значения скорости, используя в качестве участков пути, пройденных объектом, длины интервалов ΔS(j-1)i между датчиками внутри групп, а также длины комбинаций интервалов ΔS(j-1)i+ΔS(j-1)(i+1), ΔS(j-1)i+ΔS(j-1)(i+1)+ΔS(j-1)(i+2), …, ΔS(j-1)1+…+ΔS(j-1)(n-1), определяют значения скорости, используя в качестве участков пути, пройденных объектом, длины интервалов Sj между группами датчиков, а также длины всех возможных образующих непрерывный участок пути комбинаций каждого интервала Sj с одним или несколькими интервалами между датчиками, расположенными левее и правее от него в смежных группах, определяют значения скорости, используя интерполяцию на тех участках пути движения, на которых значения скорости еще не определены, и экстраполяцию в начале и в конце пути движения.
Осуществление способа предлагаемым образом, т.е. отсутствие требования равенства интервалов между группами датчиков, отсутствие требования равенства интервалов между датчиками внутри каждой группы, при этом установление между группами датчиков интервала, существенно большего, чем средний интервал между датчиками в группах, использование всех возможных образующих непрерывный участок пути комбинаций интервалов между датчиками внутри каждой группы при определении значений скорости на том участке пути движения, где размещена группа, использование всех возможных образующих непрерывный участок пути комбинаций, образованных интервалом между смежными группами датчиков с одним или несколькими интервалами между датчиками внутри этих групп при определении значений скорости на свободных от датчиков участках пути движения, неизвестно в измерительной технике.
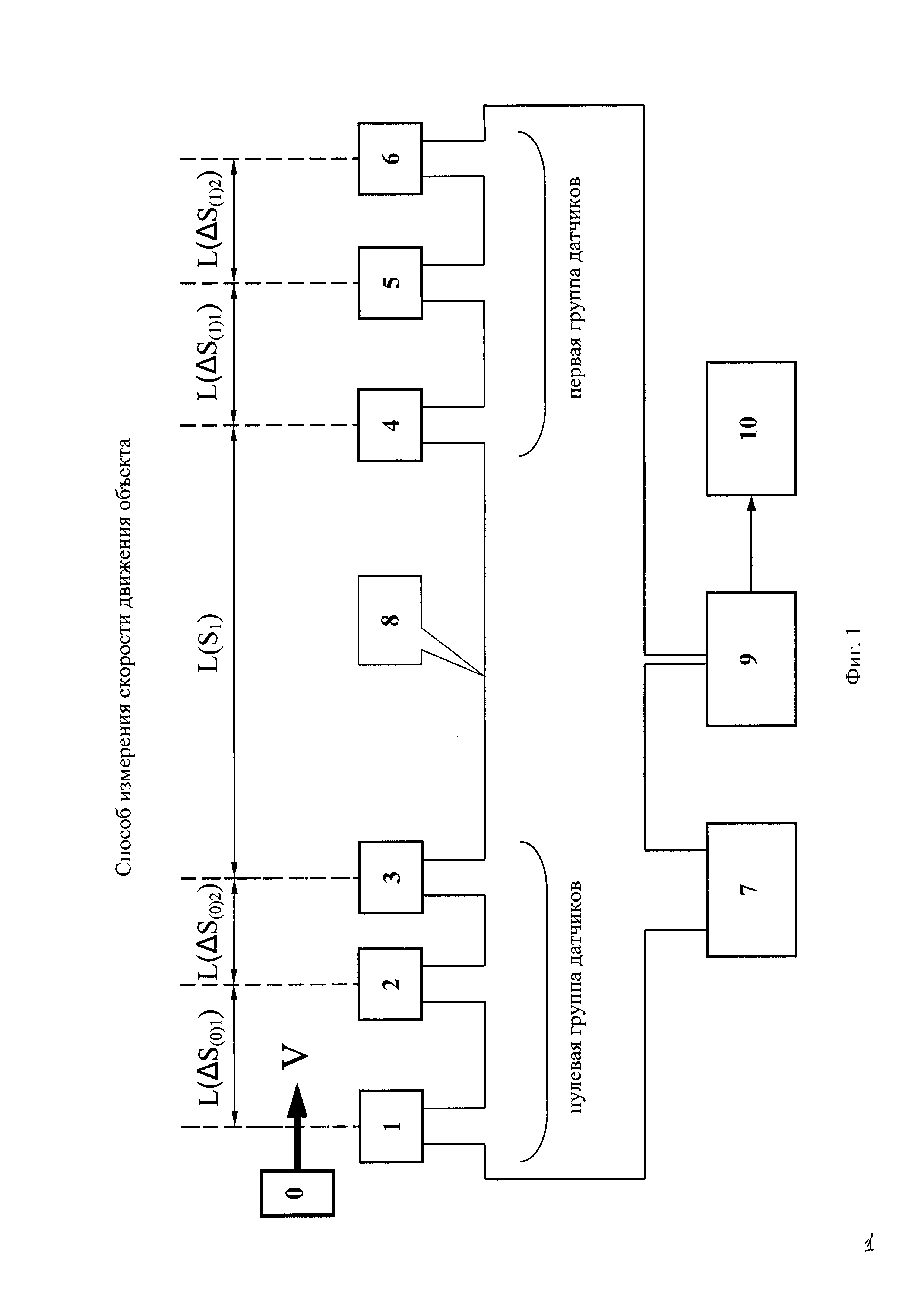
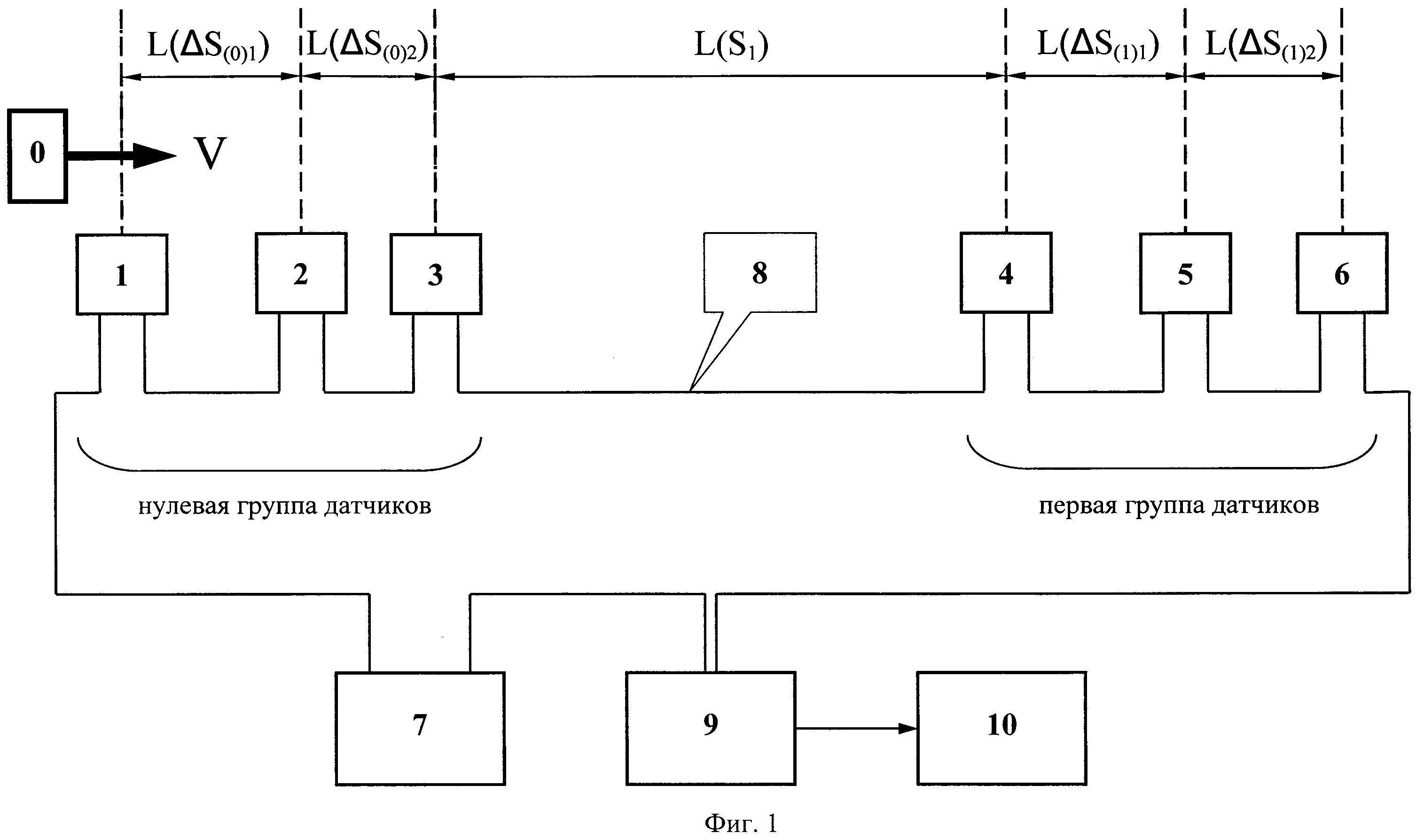
На фиг. 1 представлена блок-схема устройства для осуществления данного способа, на фиг. 2, 3 и 4 - схемы, демонстрирующие информативность и возможности данного способа, на фиг. 5 - полученные экспериментально-расчетным путем данные, подтверждающие высокую информативность результатов опытной проверки данного способа, расширенные возможности его использования.
Устройство для осуществления способа измерения скорости движения объекта 0 содержит установленный на этом объекте точечный источник постоянного магнитного поля, а так же, как показано в качестве примера на фиг. 1, датчики (герконы) 1-6, размещенные последовательно вдоль пути движения объекта и разделенные на две группы по три датчика в каждой (длины интервалов между датчиками на фиг. 1 обозначены), соединенные между собой и с источником постоянного тока 7 в последовательную электрическую цепь 8, сигнал от которой поступает в измерительное устройство 9, регистрацию сигнала и последующие вычисления осуществляет вычислительное устройство 10.
Способ осуществляют следующим образом.
При разделении размещенных вдоль пути движения объекта датчиков 1-6 на группы интервалы между ними в группах, как показано на фиг. 1, могут быть различны, что технологически упрощает реализацию способа. Количество датчиков может быть иным. Количество групп датчиков может быть иным. Интервалы между группами, если их больше чем две, могут быть различными, что также технологически упрощает реализацию способа. Средние длины интервалов L(Sk)/(n-1) и L(Sk+1)/(n-1) между датчиками в смежных группах (j-1) и (j) назначают существенно меньше длины интервала L(Sj) между этими группами. Длины всех участков пути, которые используют при определении скорости движения объекта, должны быть измерены и введены в устройство 10. Объект 0, на котором установлен точечный источник постоянного магнитного поля, двигаясь слева направо, воздействует посредством магнитного поля на датчики 1-6 поочередно в порядке их размещения. Датчики поочередно срабатывают, чем вызывают скачкообразное изменение амплитуды сигнала в электрической цепи 8. Амплитуду сигнала в электрической цепи с определенной частотой дискретизации измеряют устройством 9, а устройством 10 регистрируют образующийся временной ряд, содержащий шесть меток в виде скачкообразно изменяющейся амплитуды сигнала, отвечающих моментам срабатывания датчиков 1-6. С помощью вычислительного устройства 10 определяют значения интервалов времени между метками во временном ряду и скорость движения объекта на соответствующих участках пути, как рассмотрено ниже на фиг. 2-4 для отдельных частных случаев.
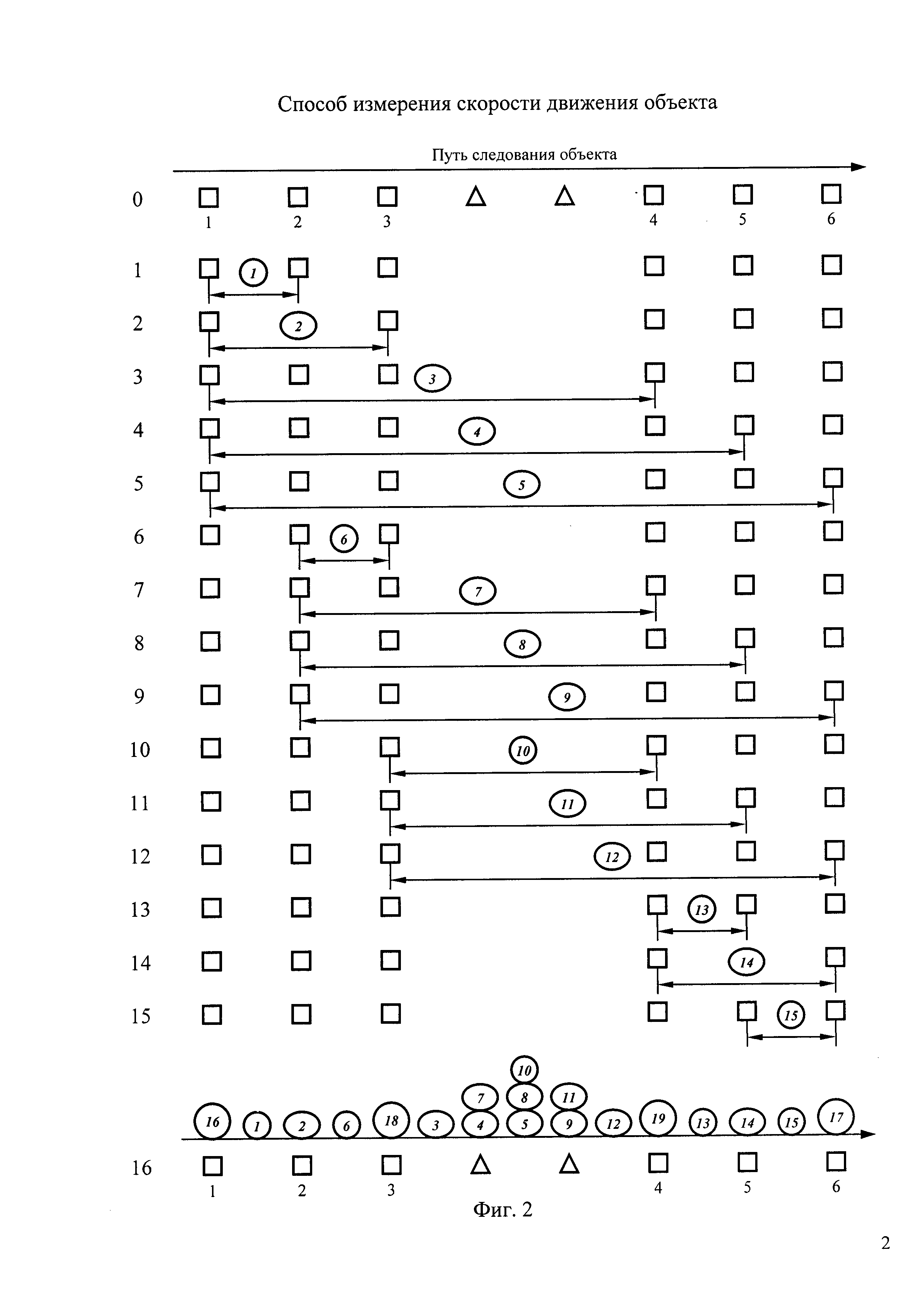
Схемы на фиг. 2 иллюстрируют пример, когда размещенные последовательно вдоль пути движения объекта датчики - обозначены на диаграммах квадратами - образуют две группы по три датчика в каждой: нулевая группа состоит из датчиков 1, 2, 3, первая группа - из датчиков 4, 5, 6. Длина интервала между группами датчиков выбрана в три раза больше, чем длина интервала, которая в данном примере выбрана неизменной, между смежными датчиками в группе. Интервал между группами датчиков размечен треугольниками с шагом, равным длине интервала между смежными датчиками в группе. Переход от схемы 0 к схемам 1, 2, 3 и т.д., вплоть до схемы 16, иллюстрирует процедуру определения скорости движения объекта на соответствующих участках пути после того, как временной ряд зарегистрирован.
На схемах 1-15 размерными стрелками между выносными линиями обозначен участок пути, на котором определяют значение скорости, а малым кружком или эллипсом - информационная точка, отвечающая этому значению. Схемы 1, 2, 6 и 13 -15 иллюстрируют определение значений скорости на участках пути с группами датчиков. Схемы 3, 4, 5 и 7-12 иллюстрируют определение значений скорости на участках пути между группами датчиков. На схеме 16 малыми кружками обозначены информационные точки, в которых значения скорости определяют с использованием длин интервалов между смежными датчиками, эллипсами обозначены информационные точки, в которых для определения значений скорости используют длины комбинаций интервалов, большими кружками обозначены информационные точки, в которых используют экстраполяцию или интерполяцию уже определенных значений скорости. Номера информационных точек с 1-й по 15-ю совпадают с номерами соответствующих схем.
В данном примере на участке пути движения объекта, на котором двумя группами размещены всего шесть датчиков, описываемый способ обеспечивает определение 19-и значений скорости. Усложнив процедуры интерполяции и экстраполяции, можно получить еще больше информационных точек, а значит и значений скорости. В информационных точках, размещенных в непосредственной близости одна от другой, в частности в точках 5, 8 и 10, может быть определено среднее значение скорости.
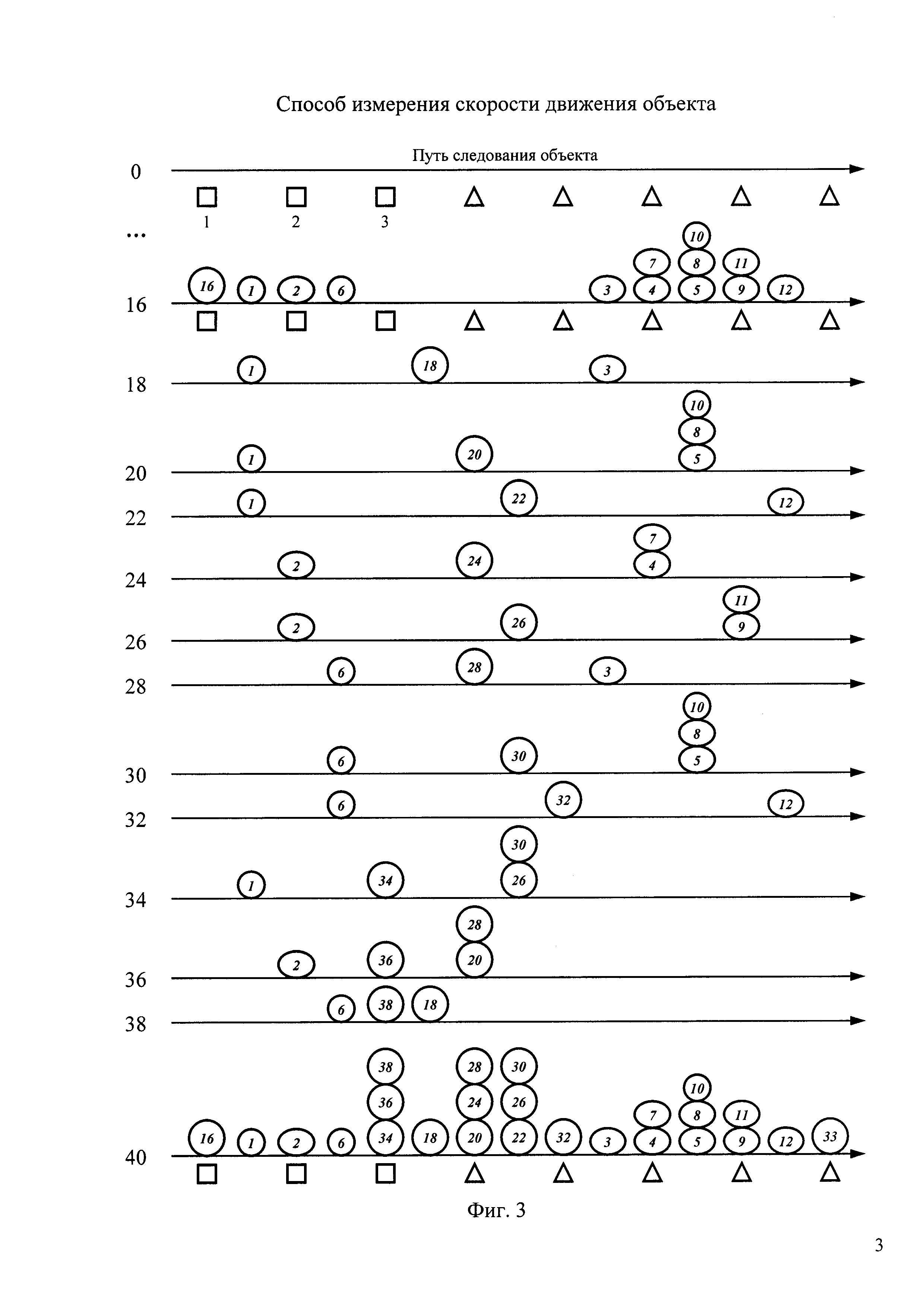
На фиг. 3 представлен пример определения скорости движения объекта в информационных точках, когда длина интервала между двумя группами по три датчика в каждой выбрана в семь раз больше, чем расстояние между смежными датчиками в группе. При этом участок пути движения объекта, на котором измеряют скорость, на схемах изображен не полностью: показаны только участок, на котором размещена состоящая из датчиков 1, 2, 3 нулевая группа, и чуть больше половины участка, расположенного между группами датчиков.
После регистрации временного ряда определение скорости движения объекта на участках пути с группами датчиков и в середине участка пути между группами датчиков выполняют так же, как показано на фиг. 2, но без интерполяции. Поэтому на фиг. 3 после схемы 0 следует схема 16, на которой информационные точки, полученные интерполяцией, отсутствуют. Переход от схемы 16 к схемам 18, 20, 22 и т.д., вплоть до завершающей схемы 40, иллюстрирует процедуру определения скорости движения объекта в информационных точках посредством интерполяции уже известных значений скорости. Четные номера информационных точек с 18-й по 38-ю совпадают с номерами соответствующих схем. Значения скорости движения объекта в информационных точках с нечетными номерами 17-39 определяют в силу симметрии, например информационных точек 32 и 33, аналогично тому, как показано на фиг. 3 для информационных точек с четными номерами.
В этом примере использована более сложная процедура интерполяции. На каждой схеме 18-38 имеется от трех до пяти информационных точек. Скорость движения объекта известна в крайних информационных точках, расположенных на равных расстояниях слева и справа от информационной точки, скорость движения в которой определяют. Для определения с помощью интерполяции скорости движения в информационных точках 34-39 используют значения скорости, частично сами полученные интерполяцией, например, в информационных точках 20 и 28.
При шести датчиках и существенно увеличенной длине интервала между группами способ обеспечивает определение 39-и значений скорости в соответствующих информационных точках, большая часть которых не требует установки вблизи от них датчиков и образовалась в соответствии с описываемым способом. Способ позволяет получить еще больше информационных точек, а значит и значений скорости. Так, могут быть получены точки, расположенные между уже полученными точками, например, посредством интерполяции значений скорости в точках 1, 4 и 7.
Описываемый способ предусматривает выбор еще большей длины интервала между смежными группами датчиков, большее число групп и датчиков в них, начиная с минимальной конфигурации - две группы по два датчика каждая. Однако слишком большой интервал между смежными группами датчиков не всегда весь будет заполнен информационными точками. Это связано с тем, что интерполяция значений скорости, одно из которых получено с использованием другого, либо когда оба значения скорости получены путем интерполяции, да еще не один раз, достаточно точного результата не даст.
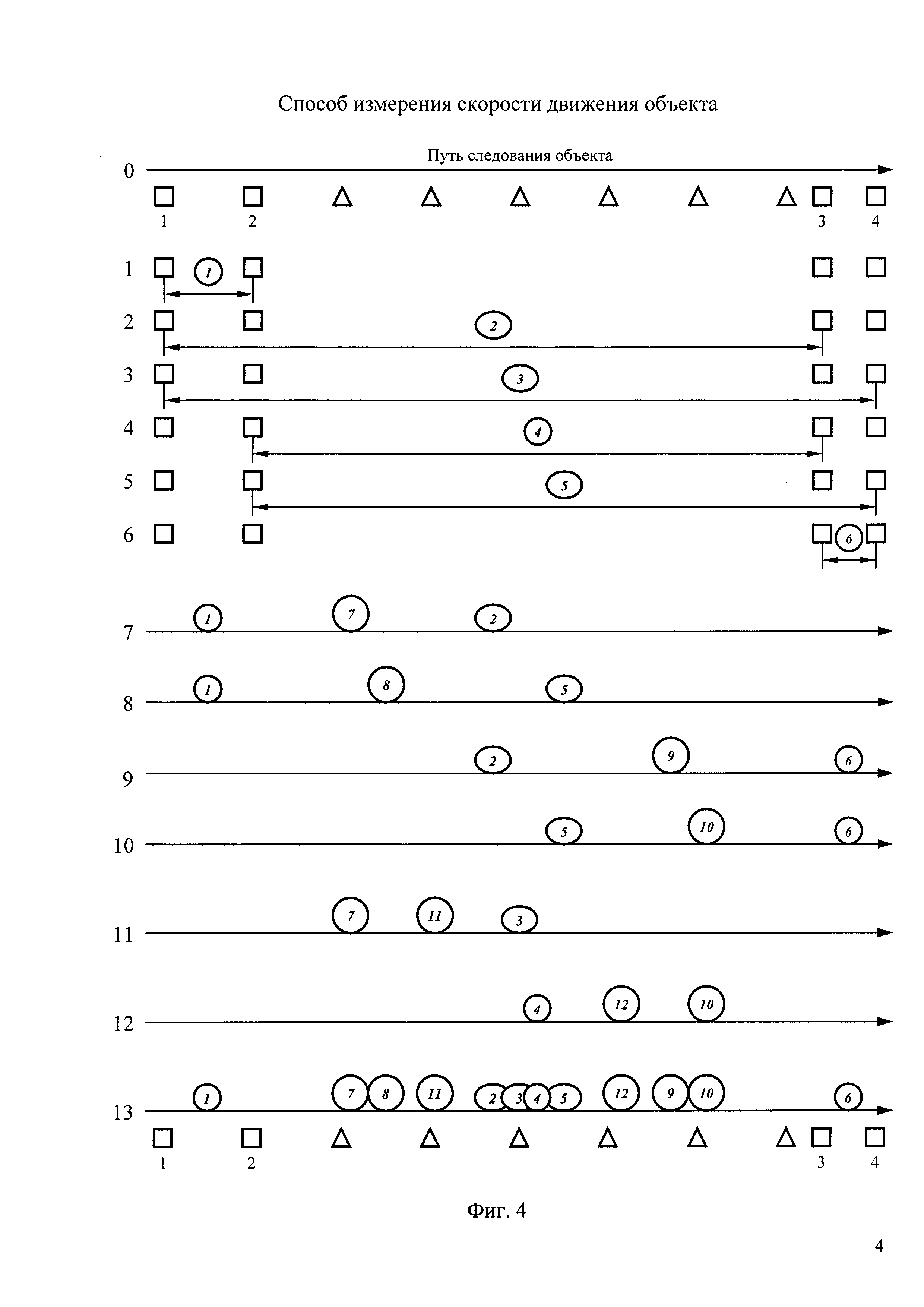
Пример одного из таких вариантов использования способа приведен на фиг. 4. Здесь длина интервала между группами из двух датчиков выбрана более чем в шесть раз больше, чем длины интервалов между смежными датчиками в группах, а интервалы между датчиками в группах имеют различную длину.
После регистрации временного ряда определение скорости движения объекта на участках пути с группами датчиков иллюстрируют схемы 1 и 6, в середине участка пути между группами датчиков - схемы 2-5. Использование интерполяции значений скорости, полученных посредством деления пройденного пути на затраченное время, для определения недостающих значений скорости иллюстрируют схемы 7-10. Для определения с помощью интерполяции скорости движения объекта в информационных точках 11 и 12 используют значения скорости, в том числе полученные интерполяцией в точках 7 и 10.
Дальнейшее получение значений скорости, например, в интервале между информационными точками 1 и 7, достаточно точного результата не даст, так как ранее при определении значения скорости в точке 7 использовалось значение скорости, полученное в точке 1, что иллюстрирует схема 7. Таким образом, слишком большой интервал между смежными группами датчиков при применении описываемого способа не всегда весь будет заполнен информационными точками.
Сведения для расчета параметров устройств, входящих в схему реализации способа, следующие.
Датчики (герконы) подключают к измерительному устройству 9 по-разному. Последовательное включение герконов, как показано на фиг. 1, осуществляют при использовании одноканального устройства 9 и размыкающих герконов. При использовании одноканального устройства 9 и замыкающих герконов их соединяют между собой параллельно. При использовании многоканального устройства 9 герконы как замыкающие, так и размыкающие подключают к его каналам индивидуально. Такие параметры герконов, как время срабатывания и время отпускания, принимают во внимание при выборе их для реализации описываемого способа с использованием одноканального устройства 9. При использовании многоканального устройства 9 ключевым параметром геркона является время отпускания, которое, как правило, в разы меньше времени срабатывания (например, для представленного на сайте ОАО «Рязанский завод металлокерамических приборов» нормально разомкнутого геркона МКА-07101 время срабатывания равно 0,3 мс, время отпускания - 0,1 мс).
Таким образом, в описываемом способе измерения скорости движения объекта с высокой информативностью интервалы между группами датчиков могут быть выбраны большими, и они полностью или большей частью будут заполнены информационными точками. Способ несложен в реализации, надежен, имеет расширенные возможности использования (интервалы между датчиками в группе и между группами датчиков выбирают достаточно произвольно), в устройстве для его осуществления используются датчики, не требующие метрологических процедур, что обеспечивает простоту в эксплуатации.
Опытная проверка данного способа осуществлялась на участке рельсового пути гидродинамического стенда длиной 13,8 м. Результаты представлены в виде точечной диаграммы на фиг. 5, изображающей зависимость измеренной в информационных точках скорости движения объекта от пройденного им пути. При измерениях использовались шесть герконов, было получено 151 значение скорости. Фрагменты диаграммы, изображенные ромбиками, отвечают интервалам, на которых значения скорости определялись посредством деления пройденного пути на затраченное время. В целях повышения точности измерений в отдельных информационных точках значения скорости осреднялись. Фрагменты диаграммы, изображенные кружками, отвечают интервалам, на которых значения скорости определялись с помощью экстраполяции и интерполяции уже известных значений скорости. При этом для повышения точности измерений также использовалось осреднение в отдельных информационных точках. Фрагменты диаграммы, изображенные треугольниками, отвечают интервалам, на которых значения скорости определялись с помощью интерполяции полученных ранее значений скорости. Для повышения точности также использовалось осреднение. Как следует из фиг. 5, каретка с объектом на всем участке пути перемещалась с постоянным ускорением. Под диаграммой изображена схема размещения герконов вдоль пути движения объекта. Герконы по техническим соображениям размещены не на одинаковых расстояниях друг от друга. Они показаны на схеме жирными черточками, расстояния между ними даны в миллиметрах. Там же представлен зарегистрированный во время опытной проверки данного способа временной ряд, который содержит шесть скачкообразных изменений амплитуды сигнала.
Опытная проверка подтвердила, что способ обладает расширенными возможностями использования, обеспечивает повышенную информативность определения скорости движения объекта в сочетании с высокими точностью и надежностью, простотой реализации и эксплуатации устройства для его осуществления. Точность определения скорости данным способом может быть повышена путем увеличения частоты измерений электрического сигнала и регистрации временного ряда.
Способ измерения скорости движения объекта, по которому всю совокупность датчиков, размещенных вдоль пути движения, разделяют на N групп по n датчиков в каждой, измеряют и регистрируют время прохождения объектом участков пути между датчиками, определяют значения скорости объекта путем деления длины участка пути на время прохождения объектом этого участка как в местах размещения групп датчиков, так и в интервалах между группами, отличающийся тем, что при разделении датчиков на группы устанавливают интервалы S между группами, между датчиками внутри групп устанавливают интервалы ΔS(), где (j-1) - порядковый номер группы; i - порядковый номер датчика в группе, при этом обеспечивают выполнение условий L(S)>>L(S)/(n-1) и L(S)/(n-1)<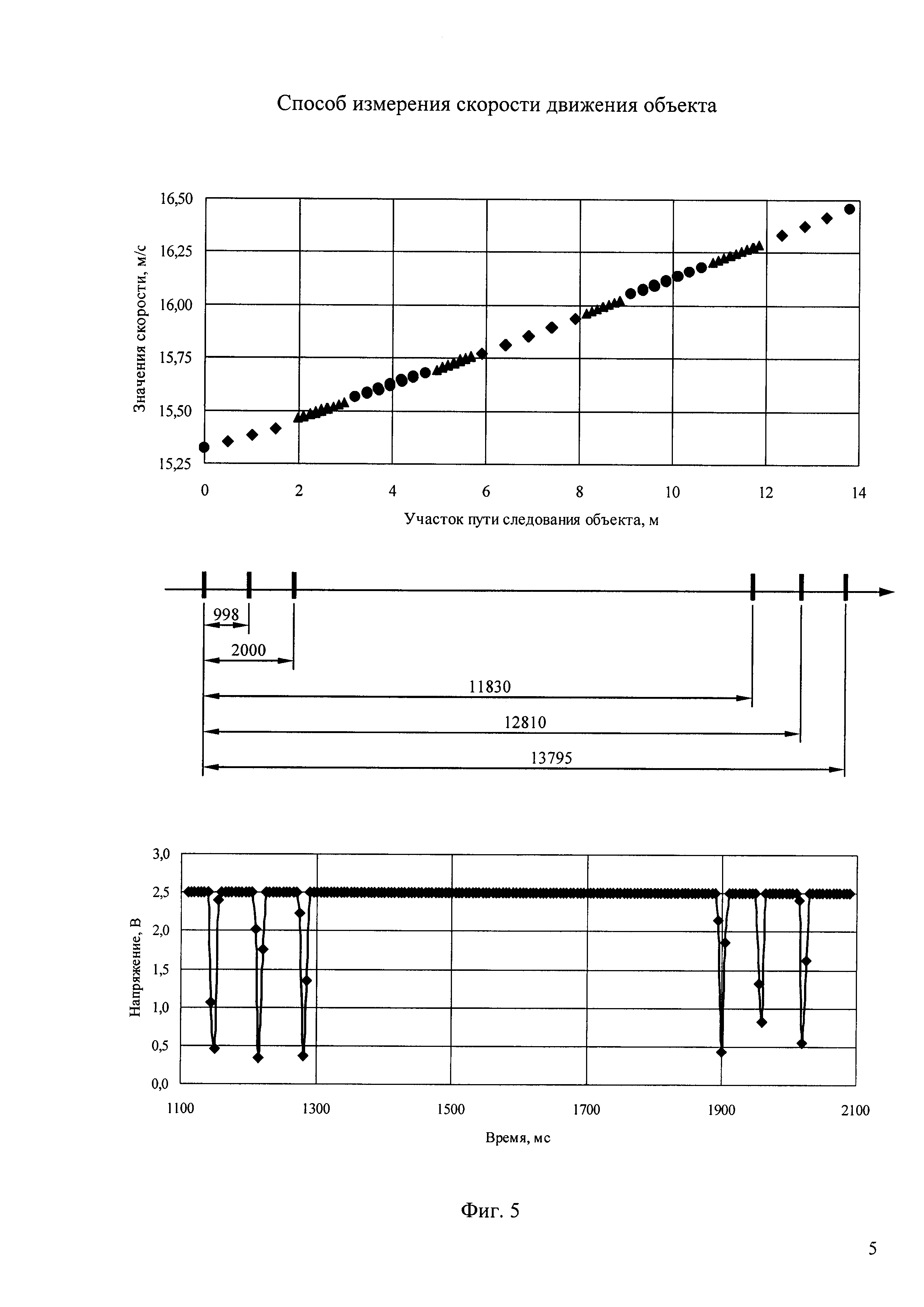
Аэроупругая модель
Регулятор давления воздуха в форкамере аэродинамической трубы
Аэродинамический профиль крыла
Многоканальный преобразователь приращения сопротивления резистивных датчиков в напряжение
Вибровозбудитель колебаний механических конструкций
Способ подготовки газа для исследований в гиперзвуковой аэродинамической трубе и устройство для его осуществления (варианты)
Устройство защиты полых изделий от превышения заданной величины внутреннего избыточного давления газа
Пятикомпонентные тензовесы
Ёмкостной инерционный датчик давления, способ его сборки и способ измерения давления
Аэродинамический руль
Аэроупругая модель
Регулятор давления воздуха в форкамере аэродинамической трубы
Аэродинамический профиль крыла
Многоканальный преобразователь приращения сопротивления резистивных датчиков в напряжение
Вибровозбудитель колебаний механических конструкций
Способ подготовки газа для исследований в гиперзвуковой аэродинамической трубе и устройство для его осуществления (варианты)
Устройство защиты полых изделий от превышения заданной величины внутреннего избыточного давления газа
Пятикомпонентные тензовесы
Ёмкостной инерционный датчик давления, способ его сборки и способ измерения давления
Аэродинамический руль

