Результат интеллектуальной деятельности: ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА
Вид РИД
Изобретение
Изобретение относится к области радиотехники, в частности к системам определения координат, и может быть применено для обеспечения навигации и геодезической привязки надводных стационарных и подвижных объектов.
Известна фазовая радиогеодезическая система (далее в материалах заявки названная фазовой радионавигационной системой) [1], содержащая бортовую и одну или несколько наземных приемопередающих станций, при этом каждая наземная приемопередающая станция содержит приемопередающую антенну, передатчик и приемник, антенный переключатель, усилитель-ограничитель, фазовый детектор, решающий блок (далее вычислительный блок), синтезатор частот, фазовращатель, генератор опорной частоты (далее опорный генератор) и коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и фазового детектора, выход которого соединен с входом вычислительного блока, выходы вычислительного блока соединены с управляющими входами синтезатора частот и фазовращателя, выход которого соединен со входом передатчика, выход опорного генератора соединен с первым входом фазового детектора, с входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входом фазовращателя и вторым входом приемника, выход которого соединен через усилитель-ограничитель со вторым входом фазового детектора, бортовая приемопередающая станция содержит приемопередающую антенну, передатчик, первый приемник, опорный генератор, индикатор, антенный переключатель, фазовый детектор, вычислительный блок, синтезатор частот, первый усилитель-ограничитель и коммутатор сигналов, коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и фазового детектора, выход которого соединен с входом вычислительного блока, выходы вычислительного блока соединены с входом индикатора, с управляющими входами коммутатора-формирователя, синтезатора частот и опорного генератора, выход которого соединен с первым входом фазового детектора, с входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом первого приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входом передатчика и вторыми входами первого и второго приемников, выход первого приемника соединен через первый усилитель-ограничитель со вторым входом коммутатора сигналов, выход которого соединен с третьим входом фазового детектора, вход управления коммутатора сигналов соединен с выходом решающего блока.
Недостатком известной фазовой радионавигационной (ФРНС) системы является использование информации сверхдлинноволновой (СДВ) радионавигационной системы, например «Омега», для получения значений априорных координат бортовой приемопередающей станции (БС), используемых для расчета расстояний от БС до наземных приемопередающих станций (НС). Полученные значения априорных расстояний БС - НС используются в качестве значений при разрешении фазовой неоднозначности. При отсутствии доступа к сигналам СДВ радионавигационной системы получение однозначной оценки координат и дальностей по сигналам известной фазовой радионавигационной системы невозможно.
Известна фазовая радионавигационная система [2], взятая в качестве прототипа, состоящая из не менее двух наземных и бортовой приемопередающих станций, в которой каждая наземная приемопередающая станция содержит приемопередающую антенну, передатчик и приемник, антенный переключатель, усилитель-ограничитель, фазовый детектор, вычислительный блок, синтезатор частот, фазовращатель, опорный генератор и коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и фазового детектора, выход которого соединен с входом вычислительного блока, выходы вычислительного блока соединены с управляющими входами синтезатора частот, опорного генератора, коммутатора-формирователя и фазовращателя, выход которого соединен с входом передатчика, выход опорного генератора соединен с первым входом фазового детектора, с входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входом фазовращателя и вторым входом приемника, выход которого соединен через усилитель-ограничитель со вторым входом фазового детектора, бортовая приемопередающая станция содержит приемопередающую антенну, передатчик, первый приемник, опорный генератор, индикатор, антенный переключатель, первый фазовый детектор, вычислительный блок, синтезатор частот, первый усилитель-ограничитель, коммутатор-формирователь, выходы которого соединены с управляющими входами передатчика, антенного переключателя и первого фазового детектора, выход которого соединен с первым входом вычислительного блока, выходы вычислительного блока соединены с входом индикатора, с управляющими входами коммутатора-формирователя, синтезатора частот и опорного генератора, выход которого соединен с первым входом первого фазового детектора, с входами синтезатора частот и коммутатора-формирователя, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом первого приемника, а вход антенного переключателя соединен с выходом передатчика, выходы синтезатора частот соединены с входом передатчика и вторым входом первого приемника, выход первого приемника соединен через первый усилитель-ограничитель со вторым входом первого фазового детектора, помимо этого бортовая приемопередающая станция содержит приемную антенну, второй приемник, второй усилитель-ограничитель и второй фазовый детектор, причем приемная антенна выходом соединена с третьим входом антенного переключателя, второй выход которого соединен с первым входом второго приемника, второй вход которого подключен к выходу синтезатора частот, а выход через второй усилитель-ограничитель подключен ко второму входу второго фазового детектора, управляющим входом соединенного с выходом коммутатора-формирователя, первый вход фазового детектора подключен к выходу опорного генератора, выход второго фазового детектора соединен со вторым входом вычислительного блока.
В данной ФРНС достигается однозначное определение координат бортовой станции (БС) во всей рабочей зоне системы и автоматизация работы ФРНС за счет автономного разрешения неоднозначности фазовых измерений БС на основе определения приближенных координат БС фазовым радиопеленгационным методом.
Недостатком известной ФРНС является наличие грубой ошибки определения приближенных координат БС, связанной с четностью тригонометрической функции cos при определении направления на i-ю НС с БС (угол α) интерферометрическим методом:
где ΔRi - разность хода сигнала i-й НС до приемопередающей и приемной антенн БС, м;
B - длина антенной базы БС (расстояние между приемопередающей и приемной антеннами БС), м;
i=1…n - текущий номер НС;
n - общее число НС, сигналы которых принимает БС.
Ошибка, возникающая при определении направления как минимум на одну НС, приводит к результирующей ошибке определения координат БС.
Задача изобретения состоит в обеспечении высокой точности определения координат, достигаемой за счет исключении ошибок определения направления на i-ю НС с БС при определении приближенных координат БС.
Поставленная задача решается тем, что в фазовую радионавигационную систему, состоящую из не менее двух наземных и бортовой приемопередающих станций, в которой каждая наземная приемопередающая станция содержит приемопередающую антенну, антенный переключатель, приемник, усилитель-ограничитель, фазовый детектор, вычислительный блок, опорный генератор, синтезатор частот, коммутатор-формирователь, фазовращатель и передатчик, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом приемника, выход которого через усилитель-ограничитель соединен с первым входом фазового детектора, выход фазового детектора соединен с входом вычислительного блока, выходы вычислительного блока соединены с управляющими входами опорного генератора, синтезатора частот, фазовращателя и коммутатора-формирователя, выход опорного генератора соединен с синтезатором частот, коммутатором-формирователем и вторым входом фазового детектора, выходы синтезатора частот соединены со вторым входом приемника и входом фазовращателя, выход которого соединен с первым входом передатчика, выходы коммутатора-формирователя подключены к третьему входу фазового детектора, к управляющему входу антенного переключателя и второму входу передатчика, выход которого соединен с входом антенного переключателя, бортовая приемопередающая станция содержит приемопередающую и приемную антенны, антенный переключатель, первый и второй приемники, первый и второй усилители-ограничители, первый и второй фазовые детекторы, вычислительный блок, индикатор, опорный генератор, синтезатор частот, коммутатор-формирователь и передатчик, приемопередающая и приемная антенны соединены с отдельными входами антенного переключателя, первый и второй выходы которого соединены с первыми входами первого и второго приемников соответственно, выходы первого и второго приемников через первый и второй усилители-ограничители соответственно соединены с первыми входами первого и второго фазовых детекторов, выходы первого и второго фазовых детекторов соединены соответственно с первым и вторым входами вычислительного блока, выходы вычислительного блока соединены с входом индикатора, управляющими входами опорного генератора, синтезатора частот и коммутатора-формирователя, выход опорного генератора соединен с синтезатором частот, коммутатором-формирователем и вторыми входами первого и второго фазовых детекторов, выходы синтезатора частот соединены со вторыми входами первого и второго приемников, и с первым входом передатчика, выходы коммутатора-формирователя подключены к третьим входам первого и второго фазовых детекторов, к управляющему входу антенного переключателя и второму входу передатчика, выход которого соединен с входом антенного переключателя, согласно изобретению, в бортовую приемопередающую станцию введены вторая приемная антенна, третий приемник, третий усилитель-ограничитель и третий фазовый детектор, причем вторая приемная антенна выходом соединена с отдельным входом антенного переключателя, третий выход которого соединен с первым входом третьего приемника, второй вход которого подключен к выходу синтезатора частот, а выход через третий усилитель-ограничитель подключен ко второму входу третьего фазового детектора, управляющим входом соединенного с выходом коммутатора-формирователя, первый вход третьего фазового детектора подключен к выходу опорного генератора, выход третьего фазового детектора соединен с третьим входом вычислительного блока, при этом расположение антенн бортовой приемопередающей станции таково, что векторы линий, соединяющих приемопередающую антенну с первой приемной антенной и приемопередающую антенну со второй приемной антенной, образуют между собой фиксированный ненулевой угол в горизонтальной плоскости.
Изобретение поясняется прилагаемыми чертежами, на которых изображены:
фигура 1 - структурная схема фазовой радионавигационной системы (ФРНС);
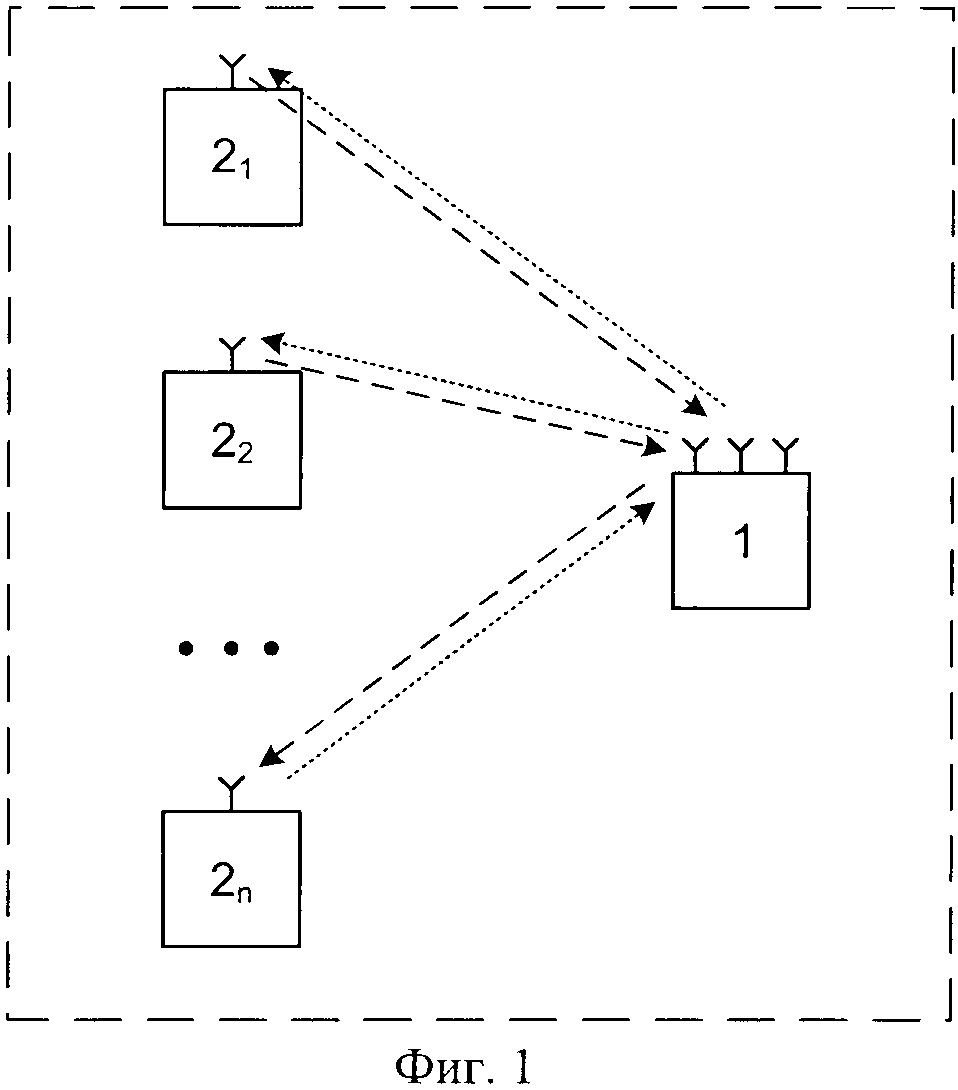
фигура 2 - структурная схема приемопередающей бортовой станции (БС);
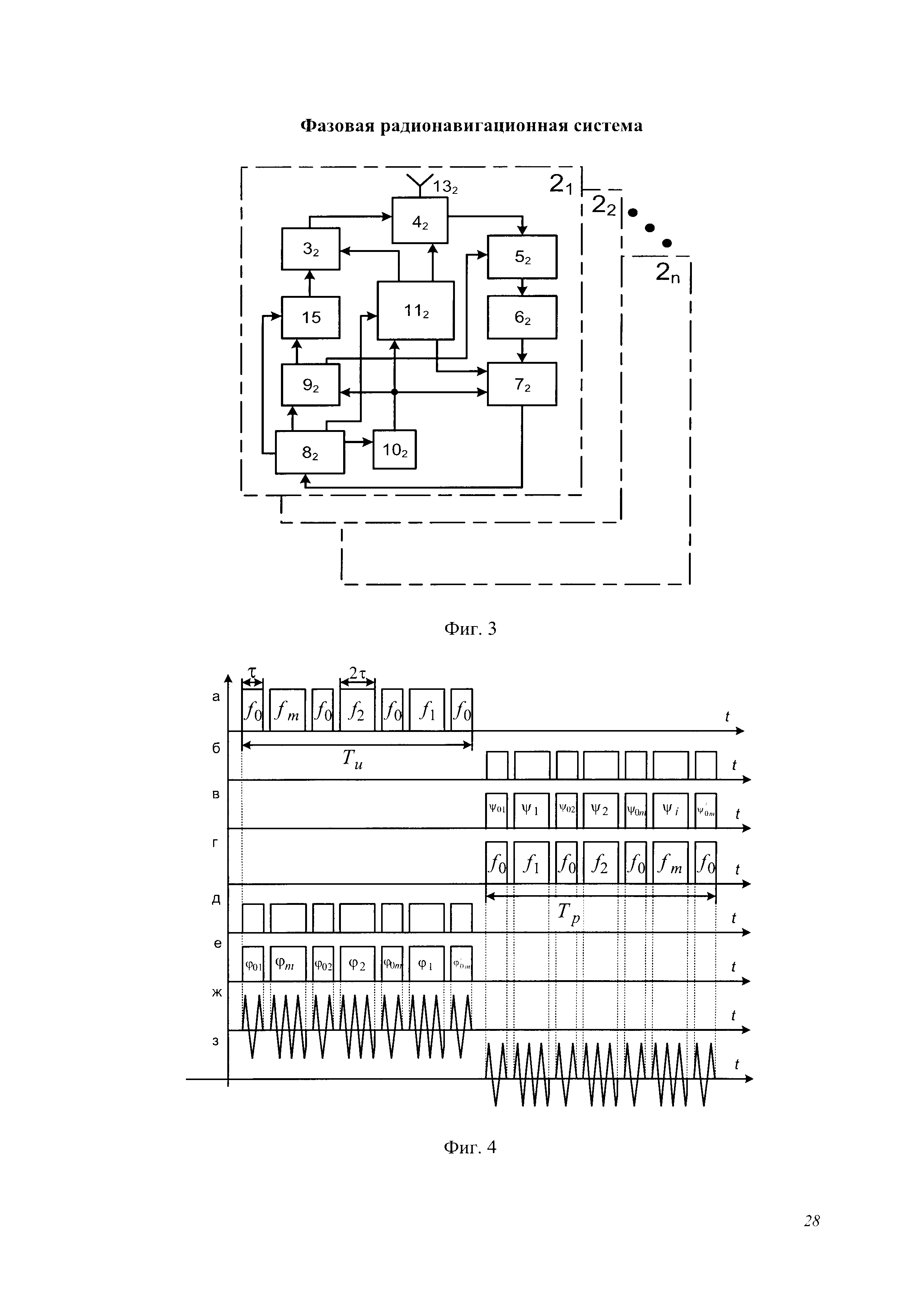
фигура 3 - структурная схема приемопередающей наземной станции (НС);
фигура 4 - временная диаграмма формирования и приема сигналов бортовой и одной из наземных приемопередающих станций;
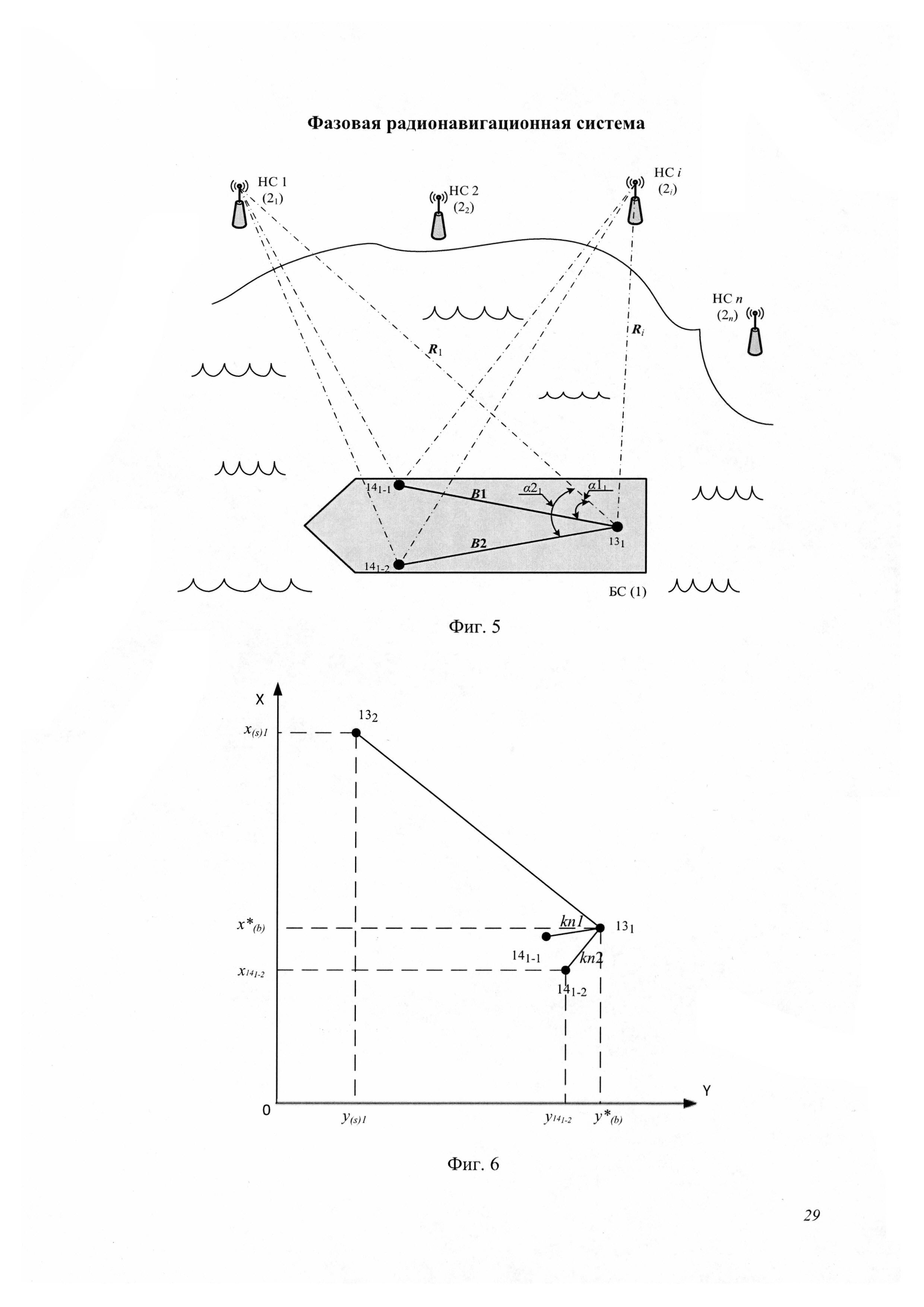
фигура 5 - схема определения курсовых углов;
фигура 6 - схема антенн БС и одной НС в прямоугольной системе координат;
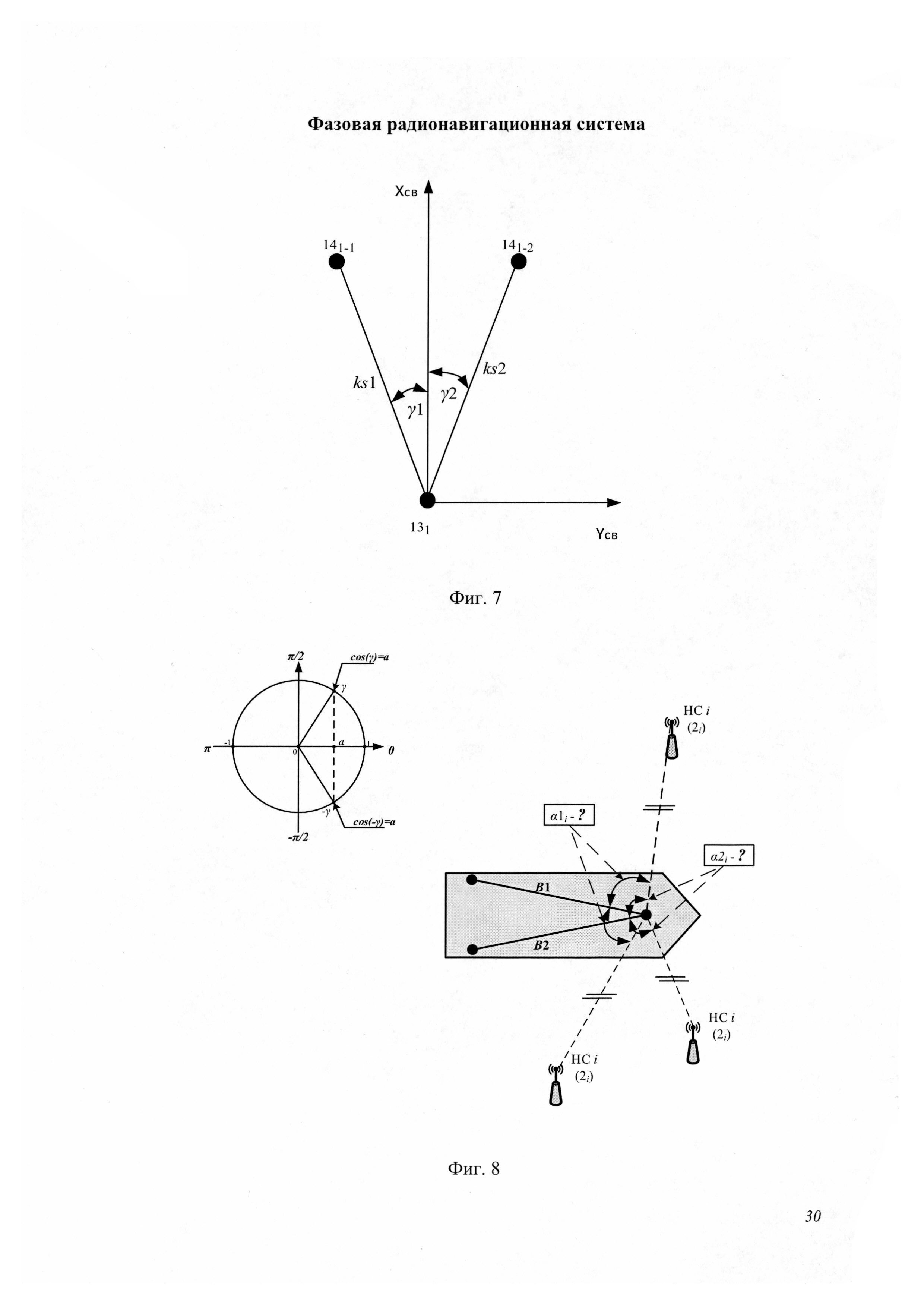
фигура 7 - схема антенн БС в связанной системе координат;
фигура 8 - пояснение возникновения ошибки при определении направления с БС на НС;
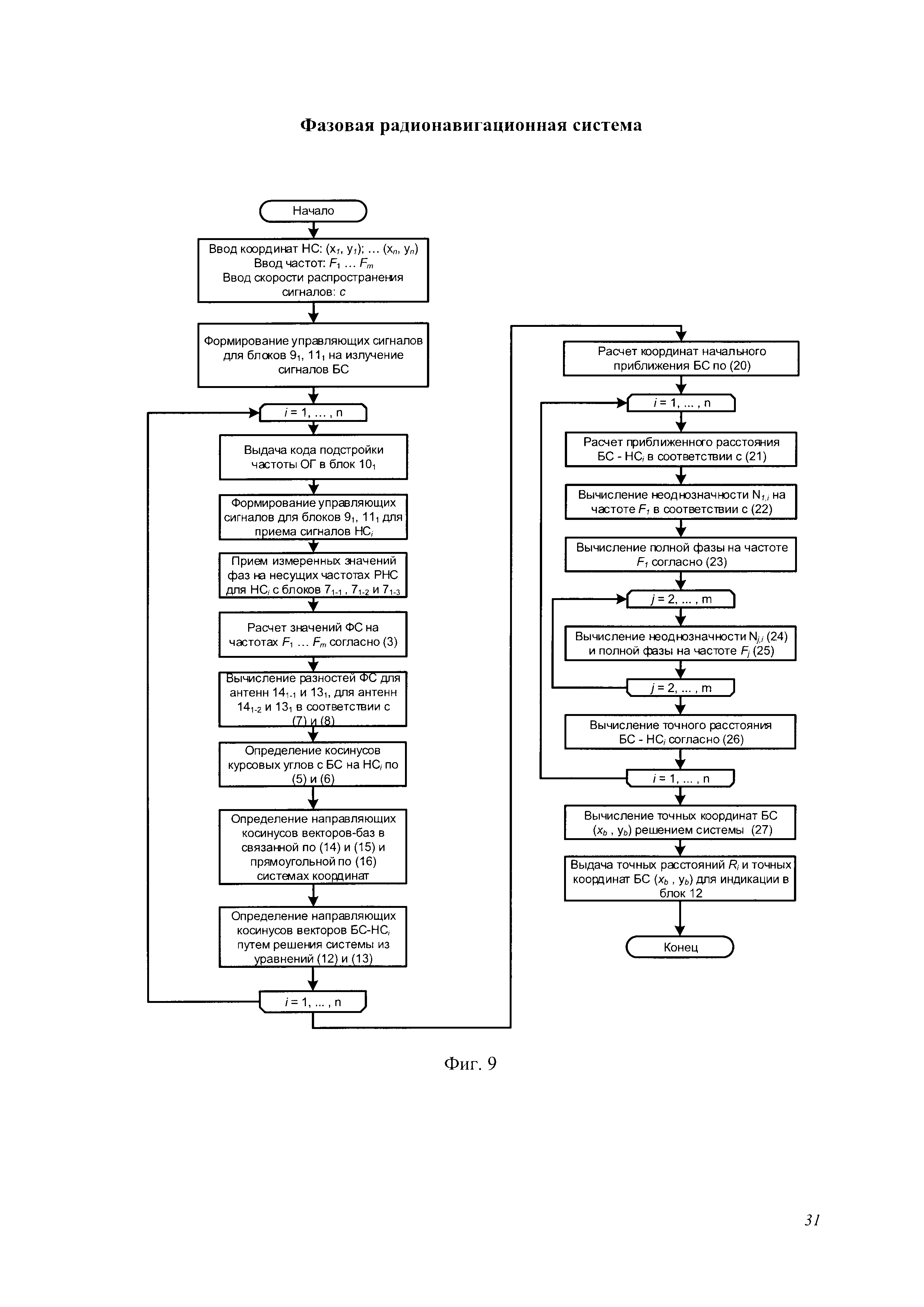
фигура 9 - блок-схема алгоритма работы вычислительного блока приемопередающей БС.
Фазовая радионавигационная система содержит бортовую приемопередающую станцию 1 и не менее двух наземных приемопередающих станций 21,…, 2n (фиг.1).
Бортовая приемопередающая станция 1 (фиг. 2) содержит последовательно соединенные передатчик 31 и антенный переключатель 41, первый выход которого подключен к последовательно соединенным первому приемнику 51-1, первому усилителю-ограничителю 61-1, первому фазовому детектору 71-1, второй выход антенного переключателя подключен к последовательно соединенным второму приемнику 51-2, второму усилителю-ограничителю 61-2, второму фазовому детектору 71-2, третий выход антенного переключателя подключен к последовательно соединенным третьему приемнику 51-3, третьему усилителю-ограничителю 61-3 третьему фазовому детектору 71-3, выходы первого, второго и третьего фазовых детекторов соединены соответственно с первым, вторым и третьим входами вычислительного блока 81, первый выход которого соединен с первым входом синтезатора частот 91, первый выход которого подключен к входу передатчика 31. Антенный переключатель 41 вторым, третьим и четвертым входами соединен с приемопередающей антенной 131 и приемными антеннами 141-1 и 141-2 соответственно. Второй выход вычислительного блока 81 соединен с индикатором 12, третий выход вычислительного блока 81 соединен с входом опорного генератора 101, четвертый выход вычислительного блока 81 соединен с первым входом коммутатора-формирователя 111. Выход опорного генератора 101 соединен с коммутатором-формирователем 111, первым 71-1, вторым 71-2 и третьим 71-3 фазовыми детекторами и синтезатором частот 91, который своим вторым выходом подключен ко вторым входам приемников 51-1, 51-2 и 51-3. Первый выход коммутатора-формирователя 111 подключен к управляющему входу антенного переключателя 41, второй выход коммутатора-формирователя 111 соединен с управляющими входами первого, второго и третьего фазовых детекторов 71-1, 71-2, 71-3, а третий его выход - с управляющим входом передатчика 31.
Каждая из наземных приемопередающих станций 21,…, 2n (фиг. 3) содержит последовательно соединенные передатчик 32, антенный переключатель 42, приемник 52, усилитель-ограничитель 62, фазовый детектор 72, вычислительный блок 82, синтезатор частот 92 и фазовращатель 15, выходом соединенный с первым входом передатчика 32. Второй выход вычислительного блока 82 соединен с вторым входом фазовращателя 15, третий и четвертый выходы вычислительного блока 82 соединены с управляющими входами соответственно опорного генератора 102 и коммутатора-формирователя 112. При этом коммутатор-формирователь 112 выходами соединен с управляющими входами соответственно передатчика 32, фазового детектора 72 и антенного переключателя 42, соединенного с приемопередающей антенной 132. А опорный генератор 102 выходом соединен со вторым входом коммутатора-формирователя 112, с третьим входом фазового детектора 72 и вторым входом синтезатора частот 92, который своим вторым выходом соединен со вторым входом приемника 52.
Фазовая радионавигационная система работает следующим образом.
Опорные генераторы 10 бортовой приемопередающей станции 1 и каждой наземной станции 21,…, 2n вырабатывают непрерывные гармонические сигналы частотой f, которые поступают на соответствующие коммутаторы-формирователи 11 и синтезаторы частот 9. Синтезаторы частот 9 вырабатывают для излучения опорный сигнал с частотой f0 и m вспомогательных сигналов с частотами f1, f2, …, fm. Кроме того, в синтезаторах частот 9 формируются сигналы гетеродина для приемников 5 с частотами f0Г, f1Г, …, fmГ, при этом управление частотой излучаемых (принимаемых) сигналов осуществляется вычислительными блоками 8 таким образом, чтобы между частотами сигналов и гетеродина выполнялись соотношения:
где j=1,…, m - текущий номер вспомогательного сигнала с частотой fj;
m - общее число вспомогательных частот;
fпр - промежуточная частота, на которой осуществляется измерение фазы принятых сигналов.
В предлагаемой ФРНС используется временное разделение сигналов станций БС 1 и каждой НС 21,…, 2n, что позволяет исключить возможное влияние сигналов станций ФРНС друг на друга. Интервал времени между излучением сигналов соседних станций подбирается таким образом, чтобы не допустить возможность взаимного перекрытия во времени сигналов станций во всей рабочей зоне ФРНС.
Коммутаторы-формирователи 11 вырабатывают сигналы управления для блоков 31 (фиг. 4, а), 41 (фиг. 4, б), 71-1 (71-2, 71-3) (фиг. 4, в), 32 (фиг. 4, г), 42 (фиг.4, д), 72 (фиг.4, е). Временные диаграммы на фиг. 4 приведены для установившегося режима заявляемой ФРНС, когда временные интервалы излучения и приема сигналов БС 1 синхронизированы с соответствующими интервалами наземных приемопередающих станций НС 21,…,2n. На временной диаграмме фиг. 4 изображены сигналы, излучаемые в пространство приемопередающей БС 1 (фиг. 4, ж) и одной из НС 2 (фиг. 4, з), например, НС 21. Сигналы НС 21,…,2n, следующие по времени за сигналами НС 21, аналогичны сигналам НС 21, поэтому на временной диаграмме фиг. 4 с целью упрощения пояснений, не приведены. На фиг. 4 обозначены: Tu - длительность интервала излучения сигналов БС; Tp - длительность интервала ретрансляции сигналов бортовой станции наземной станцией 21; τ - интервал излучения (приема) опорного сигнала частотой f0; 2τ - интервал излучения (приема) вспомогательных сигналов с частотами fj.
В соответствии с временной диаграммой фиг. 4 БС 1 излучает вспомогательные частоты f1, f2, …, fm в обратном порядке (фиг. 4, а), т.е. последовательность излучения вспомогательных частот для БС имеет вид: fm, fm-1, …, f1, в то время как каждая НС 2 излучает вспомогательные частоты в прямом порядке, т.е. в последовательности f1, f2, …, fm (фиг. 4, г).
Измененный порядок излучения вспомогательных частот позволяет однозначно идентифицировать сигналы БС 1, что требуется каждой из НС 2 для определения своего места во временном формате излучения ФРНС в зависимости от назначенного ей номера.
Для определения координат БС 1 требуется одновременная работа не менее двух НС 2 (n≥2), при этом на временной диаграмме появятся дополнительные интервалы излучения для других НС 2, работающих в составе ФРНС, что приведет к увеличению длительности временного цикла работы ФРНС.
В передатчике БС 31 осуществляется усиление сигналов от синтезатора частот 91 до необходимой величины и формирование выходных радиоимпульсных сигналов под воздействием управляющих сигналов от коммутатора-формирователя 111 (фиг. 4а). Радиоимпульсный сигнал от передатчика 31, пройдя через антенный переключатель 41, излучается в пространство приемопередающей антенной 131 (фиг. 4, ж). Сигнал, излученный в пространство БС 1 в течение времени Tu, пройдя через среду распространения, принимается приемопередающей антенной 132 каждой из НС 2 и через антенный переключатель 42 поступает на вход приемника 52. На второй вход приемника 52 подаются сигналы от синтезатора частот 92 с частотами f0Г, f1Г, …, fmГ. В приемнике 52 осуществляется преобразование принимаемого сигнала на промежуточную частоту fпр согласно соотношениям (1), а также фильтрация и усиление сигнала промежуточной частоты fпр.
Затем принятый сигнал с частотой fпр подвергается нормированию по амплитуде в усилителе-ограничителе 62 и поступает на фазовый детектор 72. В фазовом детекторе 72 под воздействием управляющих сигналов (фиг. 4, е) осуществляется измерение фазовых сдвигов принятых сигналов, при этом измеряются фазовые сдвиги: φ01, φ2, …, φ0m, φ0(m+1) опорных сигналов с частотой f0 и фазовые сдвиги φm, φm-1, …, φ1 вспомогательных сигналов с частотами fm, fm-1, …, f1. Информация с фазового детектора 72 поступает в вычислительный блок 82, в котором вычисляются фазовые соотношения:
Полученные значения фаз Δφ1, Δφ2, …, Δφm запоминаются в вычислительном блоке 82. В течение интервала Tp излучаются в пространство сигналы от НС 21, при этом управление частотой и фазой излучаемых сигналов осуществляется вычислительным блоком 82 через синтезатор частот 92 и фазовращатель 15 соответственно. В моменты времени τ, когда передатчиком 32 излучаются в пространство основные сигналы с частотой f0, фазовращатель 15 вычислительным блоком 82 устанавливается в исходное (нулевое) состояние. При этом излучаемые опорные сигналы с частотой f0 имеют фазу сигнала опорного генератора 102. В течение интервалов 2τ, когда передатчиком 32 излучаются вспомогательные сигналы с частотами f1, f2, …, fm, сигналами управления от вычислительного блока 82 в фазовращателе 15 устанавливаются фазы Δφ1, Δφ2, …, Δφm соответственно.
Таким образом, в течение интервала времени Tp передатчик 32 НС 21 излучает вспомогательные сигналы, фаза которых равна фазе принятых сигналов в течение интервалов Tu от приемопередающей БС 1, а также сигналы, фаза которых равна фазе опорного генератора 102.
В передатчике 32 осуществляется усиление сигналов от фазовращателя 15 и формирование выходных радиоимпульсных сигналов под воздействием управляющих сигналов от коммутатора-формирователя 112 (фиг. 4, г). Радиоимпульсный сигнал от передатчика 32, пройдя через антенный переключатель 42, излучается в пространство приемопередающей антенной 132 (фиг. 4, з).
Сигнал, излученный в пространство приемопередающей НС 21 в течение интервала времени ретрансляции Tp, пройдя через среду распространения, принимается приемопередающей антенной 131 и приемными антеннами 141-1 и 141-2 приемопередающей БС 1 и через антенный переключатель 41, управляемый коммутатором-формирователем 111 в соответствии с временной диаграммой (фиг. 4, б), поступает на входы приемников 51-1, 51-2 и 51-3 от антенн 131, 141-1 и 141-2 соответственно. На вторые входы приемников 51-1, 51-2 и 51-3 подаются сигналы от синтезатора частот 91 с частотами f0Г, f1Г, …, fmГ. В приемниках 51-1, 51-2 и 51-1 осуществляется преобразование сигналов на частоту fпр согласно соотношению (1). Сигналы с частотой fпр фильтруются и усиливаются, а затем нормируются по амплитуде в усилителях-ограничителях 61-1, 61-2 и 61-3 и поступают на соответствующие фазовые детекторы 71-1, 71-2 и 71-3. В фазовых детекторах 71-1, 71-2 и 71-3 под воздействием управляющих сигналов (фиг. 4, в) коммутатора-формирователя 111 осуществляется измерение фазовых сдвигов принятых сигналов, при этом измеряются фазовые сдвиги ψ01, ψ2, …, ψ0m, ψ0(m+1) опорных сигналов с частотой f0 и фазовые сдвиги ψm, ψm-1, …, ψ1 вспомогательных сигналов с частотами f1, f2, …, fm. Информация с фазовых детекторов 71-1, 71-2 и 71-3 поступает в вычислительный блок 81, в котором вычисляются фазовые соотношения:
В результате в вычислительном блоке 81 происходит определение значений фаз сигналов Δψ1, Δψ2, …, Δψm, принятых разнесенными на расстояние B1 антеннами 131 и 141-1 и на расстояние B2 антеннами 131 и 141-2 БС 1 (фиг. 5).
Полученные значения фаз  и
и  запоминаются в вычислительном блоке 81 и используются для устранения многозначности фазовых отсчетов.
запоминаются в вычислительном блоке 81 и используются для устранения многозначности фазовых отсчетов.
На практике частоты f0 f1, f2, …, fm выбираются таким образом, чтобы выполнялись соотношения:

где Fm - частота m-й ступени (рабочая частота фазовой радионавигационной системы), Гц;
F1, F2,…, Fm-1 - частоты грубых ступеней, расположенных в порядке их возрастания, Гц;
k1, k2,…, km-1 - коэффициенты сопряжения частот.
В дальнейших материалах заявки частоты F1, F2,…, Fm будут называться метрическими частотами ФРНС.
При использовании фазового метода определения навигационных параметров (НП), представляющих в данном случае удвоенные значения расстояний между приемопередающей БС 1 и каждой из приемопередающих НС 2, диапазон однозначной оценки НП определяется самой низкой из метрических частот (F1) и находится в пределах от минус λ1/2 до плюс λ1/2, где λ1=c/F1 - длина волны сигнала с частотой F1; c - скорость распространения сигналов.
В силу необходимости обеспечения работы большого числа НС 2 и реализации высокого темпа выдачи координат БС 1 метрическая частота F1, как правило, не обеспечивает однозначного определения расстояний во всей рабочей зоне ФРНС. Кроме того, как было указано выше, величина фазового сдвига Δψ1 сигнала на метрической частоте F1 соответствует сигналу данной частоты, прошедшему удвоенное расстояние от БС 1 до НС 2. Перечисленные факторы приводят к необходимости задания начальных значений расстояний  от БС 1 до i-й НС 2i с погрешностью не более ±λ1/4, поскольку реальная фазометрическая аппаратура выполняет измерения фазового сдвига в пределах ±180°, что соответствует половине длины волны сигнала, на котором происходят измерения фазовых сдвигов.
от БС 1 до i-й НС 2i с погрешностью не более ±λ1/4, поскольку реальная фазометрическая аппаратура выполняет измерения фазового сдвига в пределах ±180°, что соответствует половине длины волны сигнала, на котором происходят измерения фазовых сдвигов.
В прототипе изобретения для начальной оценки значений расстояний  (i=1, …, n) между БС и НС был предложен способ, основанный на определении курсовых углов с БС на НС при помощи двухантенного интерферометра и известном угле курса объекта-носителя БС с последующим пересчетом найденных углов в координаты БС в прямоугольной системе координат Гаусса-Крюгера. При этом следует отметить, что в прототипе могут возникнуть грубые ошибки при определении курсовых углов с БС на НС, когда несколько НС находятся по обеим сторонам относительно антенной базы БС (фиг. 8).
(i=1, …, n) между БС и НС был предложен способ, основанный на определении курсовых углов с БС на НС при помощи двухантенного интерферометра и известном угле курса объекта-носителя БС с последующим пересчетом найденных углов в координаты БС в прямоугольной системе координат Гаусса-Крюгера. При этом следует отметить, что в прототипе могут возникнуть грубые ошибки при определении курсовых углов с БС на НС, когда несколько НС находятся по обеим сторонам относительно антенной базы БС (фиг. 8).
В заявляемом изобретении в отличие от прототипа предлагается использовать трехантенный (или двухбазовый) интерферометр, при этом антенные базы расположены под фиксированным углом по отношению друг к другу. Благодаря вновь введенным в БС узлам и связям в предлагаемой ФРНС устраняются возможные ошибки определения направлений с БС на НС и достигается высокая точность определения координат.
Определение приближенных координат БС на основе интерферометрического метода в заявляемом изобретении заключается в следующем.
Двухбазовой антенной системой БС 1, образованной разнесенными в пространстве приемопередающей антенной 131 и приемной антенной 141-1 на расстояние B1 (база B1) и приемопередающей антенной 131 и приемной антенной 141-2 на расстояние B2 (база B2), осуществляется прием сигналов от n приемопередающих НС 2 с известными координатами. При этом измеряется разность хода сигналов ΔR1i и ΔR2i от i-й приемопередающей НС 2i до разнесенных антенн 131и 141-1, 131 и 141-2 БС 1 соответственно.
Косинус курсового угла cosα1i между вектором, соединяющим антенны 131 и 14l-1 БС 1, и вектором-направлением от антенны 131 БС на приемопередающую антенну 132 i-й НС 2 связан со значением разности фаз сигналов, принятых антеннами 131 и 141-1 следующим соотношением:

где i=1,…, n - текущий номер НС;
n - общее число НС, сигналы которых принимает БС;
λ - длина волны сигнала i-й НС, м;
B1 - расстояние между приемопередающей антенной 131 и приемной антенной 141-1, м;
ΔR1i - разность хода сигнала i-й НС до приемопередающей антенны 131 и приемной антенны 141-1, м;
Ф1i - фазовая разность хода между сигналом i-й НС при приеме антеннами 131 и 141-1, ф. ц.
Аналогичным образом определяется косинус курсового угла cosα2i между вектором, соединяющим антенны БС 131 и 141-2, и вектором-направлением от антенны 131 БС на приемопередающую антенну 132 i-й НС:

где B2 - расстояние между приемопередающей антенной 131 и приемной антенной 141-2, м;
ΔR2i - разность хода сигнала i-й НС до приемопередающей антенны 131 и приемной антенны 141-2, м;
Ф2i - фазовая разность хода между сигналом i-й НС при приеме антеннами 131 и 141-2, ф. ц.
Значение фазовых сдвигов с целью получения максимальной точности определения грубых координат вычисляется на метрической частоте Fm ФРНС. В этом случае значение фазовой разности хода Ф1 m,j определяется на основе измеренных значений фазовых сдвигов для антенн 131 и 141-1 как:

где m - номер самой точной ступени устранения неоднозначности, соответствующей рабочей частоте ФРНС Fm.
Аналогичным образом определяется фазовая разность Ф2 m,i:

Если каждое из расстояний B1 и B2 будет меньше λm/2, то значения фазовых разностей Ф1m,i и Ф2m,i не будут содержать целочисленной неоднозначности. В этом случае, согласно выражениям (5) и (6), будут определены косинусы курсовых углов α1i и α2i до каждой из наземных станций (фиг. 5).
Далее рассмотрим заявляемую ФРНС в двух различных системах координат: прямоугольной системе координат (плоскость Гаусса-Крюгера) и связанной с объектом-носителем БС системе координат.
Прямоугольная система координат (плоскость Гаусса-Крюгера) имеет начало координат в некоторой произвольной точке с осью ОХ, направленной на географический Север, и осью OY - на географический Восток (фиг. 6).
Согласно правилу вычисления скалярного произведения векторов в прямоугольной системе координат, косинус угла между двумя произвольными векторами, применимо к заявляемой ФРНС, равен:


x(s)i, y(s)i- координаты i-й НС (приемопередающей антенны 132) в прямоугольной системе координат, м;
 ,
,  - координаты БС (приемопередающей антенны 131) в прямоугольной системе координат, м;
- координаты БС (приемопередающей антенны 131) в прямоугольной системе координат, м;
Ri - расстояние между БС (приемопередающей антенной 131) и i-й НС (приемопередающей антенной 132), м;
 - координаты приемной антенны 141-1 в прямоугольной системе координат, м;
- координаты приемной антенны 141-1 в прямоугольной системе координат, м;
 - координаты приемной антенны 141-2 в прямоугольной системе координат, м.
- координаты приемной антенны 141-2 в прямоугольной системе координат, м.
Произведем следующие замены исходя из определения направляющих косинусов:

где k(x)i, k(y)i - направляющие косинусы вектора, соединяющего антенну БС 131 и антенну i-й НС 132 в прямоугольной системе координат;
kn1(x), kn1(y) - направляющие косинусы вектора-базы, соединяющей антенны БС 131 и 141-1 в прямоугольной системе координат (фиг. 5);
kn2(x), kn2(y) - направляющие косинусы вектора-базы, соединяющей антенны БС 131 и 141-2 в прямоугольной системе координат.
Тогда выражения (9) и (10) соответственно примут вид:


Связанная с объектом-носителем БС двухмерная система координат имеет начало координат в точке фазового центра приемопередающей антенны БС 131, ось ОХ направлена по продольной оси объекта-носителя БС, ось OY - вправо (фиг. 7).
Направляющие косинусы вектора-базы, соединяющей антенны БС 131 и 141-1, и вектора-базы, соединяющей антенны БС 131 и 141-2 в связанной с БС системе координат, определяются следующим образом:


где ks1(x), ks1(y) - направляющие косинусы вектора-базы, соединяющей антенны БС 131 и 141-1 в связанной системе координат;
ks2(x), ks2(y) - направляющие косинусы вектора-базы, соединяющей антенны БС 131 и 141-2 в связанной системе координат;
γ1 - фиксированный угол между осью ОХ связанной системы координат и вектором-базой, соединяющей антенны БС 131 и 141-1, рад;
γ2 - фиксированный угол между осью ОХ связанной системы координат и вектором-базой, соединяющей антенны БС 131 и 141-2, рад.
Связь векторов в двух рассмотренных системах координат описывается матрицей перехода С. Для каждого вектора-базы БС переход записывается в виде:

где kn1 - вектор-столбец из направляющих косинусов вектора-базы, соединяющей антенны БС 131 и 141-1 в прямоугольной системе координат knl(x), kn1(y),
kn2 - вектор-столбец из направляющих косинусов вектора-базы, соединяющей антенны БС 131 и 141-1 в прямоугольной системе координат kn2(x), kn2(у),
ksl - вектор-столбец из направляющих косинусов вектора-базы, соединяющей антенны БС 131 и 141-1 в связанной с БС системе координат ksl(s), ks1(y),
ks2 - вектор-столбец из направляющих косинусов вектора-базы, соединяющей антенны БС 131 и 141-2 в связанной с БС системе координат ks2(x), ks2(y),
Ψкурс - угол курса объекта-носителя БС.
В результате подстановки (14) и (15) в уравнения (16) определяются значения kn1(x), kn1(y), kn2(x), kn2(y).
Далее, используя значения kn1(x), kn1(y), kn2(x), kn2(y), решается система уравнений вида (12) и (13) и определяются значения направляющих косинусов ki.
По известным значениям k(x)i, k(y)i можно найти приближенные координаты БС
,
, используя первую строку из (11):

В результате для НС n≥2 будет получена система из n уравнений вида (17) с двумя неизвестными - приближенными координатами БС
,
, соответствующими координатам приемопередающей антенны 131.
Перенеся неизвестные приближенные координаты БС в левую часть, систему уравнений (17) можно записать следующим образом:

Уравнения (18) в матричной форме записи примут вид:

где A - матрица коэффициентов системы уравнений (18) размерностью [n×2];
B - вектор-столбец свободных членов из n элементов;
X - вектор-столбец неизвестных приближенных координат БС
,
.
При избыточности системы уравнений (18) ее решение удобно осуществлять по методу наименьших квадратов. В этом случае решение системы вида (19) запишется в виде:

В результате решения системы уравнений (18) безошибочно определяются неизвестные приближенные координаты БС
,
, которые в дальнейшем используются в качестве координат начального приближения в процедуре разрешения неоднозначности фазовых измерений, осуществляемой, например, по методу пересчета измерений (МПИ) [3].
Найденные координаты начального приближения используются для вычисления начальных значений дальностей БС - i-я НС  в соответствии с выражением:
в соответствии с выражением:

где i=1,…,n - текущей номер НС, сигнал которой принимает БС;
n≥2 - общее число НС в ФРНС.
Согласно МПИ значения целочисленной неоднозначности N1,i для первой метрической частоты F1 определяются в соответствии с выражением:

где N1.i - значение целочисленной неоднозначности фазовых измерений при метрической частоте F1 для i-й НС;
λ1 - длина волны сигнала первой метрической частоты F1, м;
 - значение измеренного фазового сдвига на первой метрической частоте F1, ф. ц.;
- значение измеренного фазового сдвига на первой метрической частоте F1, ф. ц.;
[.] - операция выделения целой части числа.
После определения N1,i вычисляется значение полного фазового сдвига для сигнала первой метрической частоты F1:

где Ψ1,i - полный фазовый сдвиг между сигналом, излученным БС, и сигналом, принятым от i-й НС, пропорциональный двойному расстоянию от БС до i-й НС, на частоте F1, ф. ц.
Затем осуществляется последовательное разрешение неоднозначности (РН) для каждой из ступеней (метрической частоты) вплоть до самой точной ступени m (самой высокой метрической частоты Fm). Процедура РН осуществляется в соответствии с выражениями:


где j=2,…,m - текущий номер ступени РН;
m - общее число ступеней;
λj-1 - длина волны сигнала метрической частоты Fj-1, м;
λj - длина волны сигнала метрической частоты Fj, м;
Ψ(j-1),i - полный фазовый сдвиг между сигналом, излученным БС, и сигналом, принятым от i-й НС, на частоте F(j-1), ф. ц.;
Ψj,i - полный фазовый сдвиг между сигналом, излученным БС, и сигналом, принятым от i-й НС, на частоте Fj, ф. ц.;
 - измеренное значение фазового сдвига сигнала i-й НС на частоте Fj, принятого антенной БС 131, ф. ц.
- измеренное значение фазового сдвига сигнала i-й НС на частоте Fj, принятого антенной БС 131, ф. ц.
Таким образом, в соответствии с выражениями (24) и (25) осуществляется последовательное определение полных фазовых сдвигов для частот F2, …, Fm. По окончании процедуры РН становятся известными значения полных фазовых сдвигов Ψm,i на рабочей частоте ФРНС, соответствующей наивысшей метрической частоте Fm.
Полученные значения полных фазовых сдвигов Ψm,1, Ψm,2, …, Ψm,n с устраненной многозначностью соответствуют сигналам с частотой Fm, прошедшим дважды через среду распространения расстояние от БС до соответствующей НС. Значения полных фазовых сдвигов пропорциональны времени запаздывания радиоволн в точке приема по отношению к моменту их излучения и не содержат фазовых набегов, обусловленных аппаратурой блоков БС 1 и НС 21÷2n.
Значения Ψm,1, Ψm,2, …, Ψm,n используются для точного определения расстояния Ri между антенной 131 БС и антенной 132 i-й НС при известной скорости распространения радиосигналов по формуле:

где c - скорость распространения радиосигналов, м/с.
Полученные значения точных расстояний Ri между БС и НС используются для вычисления высокоточных координат БС путем решения системы из n уравнений. Для дальномерного режима определения координат объекта уравнения имеют вид:

где i=1,…,n - текущей номер НС, до которой определено расстояние R;
n - общее число НС в ФРНС;
Х (b), y(b) - высокоточные координаты БС (в точке антенны 131), м.
Решение системы нелинейных уравнений (27) с целью определения точных координат БС может быть осуществлено, например, на основе итерационного метода, рассмотренного в [4, стр. 49-55].
Блок-схема алгоритма работы вычислительного блока 81 при определении координат БС 1 в составе предложенной ФРНС приведена на фиг. 9.
Данный алгоритм приведен только для одного шага обработки результатов измерений фазовых сдвигов по сигналам НС 21-2n, но в аппаратуре предусмотрено циклическое повторение алгоритма с периодом, соответствующим длительности рабочего цикла ФРНС Тц.
На первом шаге данного алгоритма осуществляется ввод исходных данных, в частности координат всех НС фазовой радионавигационной системы - (x1, y1), …, (xn, yn); метрических частот - F1, …, Fm; скорости распространения радиосигналов на данном участке трассы - c.
Затем начинается циклическая работа алгоритма с периодом повторения Тц.
При этом осуществляется формирование управляющих сигналов для блоков синтезатора частоты 91 и коммутатора-формирователя 111 в соответствии с временной диаграммой для интервала времени излучения Tu, приведенной на фиг. 4. По окончании излучения сигнала БС вычислительный блок 81 переходит в режим поочередного приема сигналов НС, что соответствует показанному на блок-схеме алгоритма циклу приема i=1, …, n. В данном цикле i соответствует текущему номеру принимаемой НС, общее число принимаемых сигналов НС составляет n.
В цикле приема сигнала i-й НС осуществляются следующие действия.
На первом шаге осуществляется выдача кода подстройки частоты опорного генератора (ОГ) 101 БС в соответствии с определенным отклонением частоты ОГ БС по отношению к сигналу текущей принимаемой НС. Определение величины отклонения частоты ОГ может быть осуществлено на основе анализа значений фазовых сдвигов ψ01, ψ2, …, ψ0m, ψ0(m+1) сигналов с частотой f0, принятых от каждой из НС. При этом обеспечивается подстройка частоты ОГ 101 под частоту ОГ 102 текущего принимаемого сигнала НС, что исключает погрешность измерения фазового сдвига, вызванную частотным рассогласованием сигналов БС и НС. Алгоритм определения отклонения частоты ОГ для приведенной в материалах заявки структуры сигналов ФРНС может быть реализован в соответствии с [5].
Далее осуществляется формирование управляющих сигналов для блоков синтезатора частоты 91 и коммутатора-формирователя 111 для интервала ретрансляции Tp, приведенного на фиг. 4. При этом в вычислительном блоке 81 принимаются и запоминаются измеренные значения фазовых сдвигов ψ01, ψ2, …, ψ0m, ψ0(m+1) опорных сигналов частоты f0 и фазовых сдвигов ψ1, ψ2, …, ψm вспомогательных сигналов с частотами f1, f2, …, fm, измеренных фазовыми детекторами 71-1, 71-2 и 71-3. Далее в соответствии с выражением (3) осуществляется расчет разностей фазовых сдвигов  для антенны 131, фазовых сдвигов
для антенны 131, фазовых сдвигов  для антенны 141-1 и фазовых сдвигов
для антенны 141-1 и фазовых сдвигов  для антенны 141-2. Затем происходит расчет разностей фазовых сдвигов между сигналами, принятыми антеннами 141-1 и 131-Ф1m,i, и разностей фазовых сдвигов между сигналами, принятыми антеннами 141-2 и 131-Ф2m,i, на рабочей метрической частоте ФРНС Fm в соответствии с выражениями (7) и (8). На следующем шаге алгоритма определяются значения курсового угла α1i согласно выражению (5) и курсового угла α2i согласно выражению (6).
для антенны 141-2. Затем происходит расчет разностей фазовых сдвигов между сигналами, принятыми антеннами 141-1 и 131-Ф1m,i, и разностей фазовых сдвигов между сигналами, принятыми антеннами 141-2 и 131-Ф2m,i, на рабочей метрической частоте ФРНС Fm в соответствии с выражениями (7) и (8). На следующем шаге алгоритма определяются значения курсового угла α1i согласно выражению (5) и курсового угла α2i согласно выражению (6).
После определения значений фазовых сдвигов Ф1m,i, Ф2m,i и косинусов курсовых углов с БС на НС α1i, α2i по выражениям (14) и (15) определяются значения направляющих косинусов векторов-баз в связанной с объектом-носителем БС системе координат ks1 и ks2. Далее, используя известное значение угла курса объекта-носителя БС Ψкурс осуществляется пересчет значений ks1 и ks2 в значения направляющих косинусов векторов-баз в прямоугольной системе координат kn1 и kn2 по выражению (16). По полученным значениям kn1 и kn2 определяются направляющие косинусы векторов от БС до i-й НС k(x)i, k(y)i для каждой из НС путем решения системы уравнений вида (12) и (13). Затем производится расчет приближенных координат БС (
,
), решая систему (18) по выражению (20).
После определения приближенных координат БС осуществляется расчет приближенных расстояний между БС и i-й НС  в соответствии с выражением (21). При этом предельная погрешность полученного приближенного значения расстояния, как было отмечено выше, не должна превышать значения ±λ1/4.
в соответствии с выражением (21). При этом предельная погрешность полученного приближенного значения расстояния, как было отмечено выше, не должна превышать значения ±λ1/4.
Соблюдение этого условия приводит к безошибочному определению целочисленной неоднозначности N1,i на метрической частоте F1 в соответствии с выражением (22), которое выполняется на следующем шаге алгоритма. Затем осуществляется вычисление полной фазы Ψ1,i для сигнала i-й НС на частоте F1 согласно выражению (23).
Далее вычислительным блоком 81 выполняется цикл последовательного РН по метрическим частотам Fj(j=2, …, m) в соответствии с выражениями (24) и (25). По окончании данного цикла становится известной величина полного фазового сдвига Ψm,i на рабочей частоте РНС Fm.
Далее по полученным значениям фазовых сдвигов Ψm,i в вычислительном блоке 81 происходит определение точного расстояния между БС и i-й НС Ri (26). По окончании цикла обработки результатов измерений фазовых сдвигов для сигналов n НС происходит вычисление точных координат БС ((x(b), y(b))) по точным значениям расстояний R1÷Rn путем решения системы уравнений (27).
По окончании вычислений полученные значения точных координат БС (x(b), y(b)) в прямоугольной системе координат Гаусса-Крюгера и расстояний БС - НС R1÷Rn выдаются для индикации потребителям в блок 12.
Длительность цикла работы вычислительного блока 81 выбирают таким образом, чтобы за время Тц успевали выполняться операции измерения фазовых сдвигов для всех НС фазовой радионавигационной системы, расчет грубых координат БС на основе курсовых углов, а также разрешение неоднозначности и вычисление дальностей до НС и координат БС.
Кроме того, вычислительный блок 81 может решать сервисные задачи, например осуществлять пересчет координат из прямоугольной системы координат в географические на заданном пользователем эллипсоиде, решать задачи маршрутной навигации объекта-носителя БС и др.
Результаты решения сервисных и навигационных задач при необходимости поступают в блок индикации 12 для отображения оператору.
Алгоритм работы вычислительного блока НС 82 при решении задачи приема сигналов и измерения их параметров аналогичен алгоритму работы вычислительного блока НС, представленному в прототипе [2].
Вычислительные блоки БС 81 и НС 82 в связи с высокими требованиями к быстродействию, большим объемом вычислений и сложностью управляющих алгоритмов и программ необходимо реализовать на основе современных быстродействующих универсальных микропроцессоров или программируемых логических интегральных схемах (ПЛИС), например на современных воспроизводительных ПЛИС Xilinx семейства Artix-7 (микросхема z-7020).
В результате за счет введения новых элементов и связей в БС ФРНС достигается однозначное безошибочное определение направлений с БС на каждую НС, что позволяет определить приближенные координаты объекта-носителя БС по сигналам минимум двух НС.
Полученные известные приближенные координаты БС используются для однозначного определения фазовых измерений во всей рабочей зоне ФРНС по сигналам как минимум двух НС и последующего высокоточного определения координат объекта-носителя БС с погрешностью до десятых долей метра.
Благодаря достигаемой высокой точности определения координат предложенная ФРНС может являться эталонным измерителем при экспериментальных исследованиях навигационных систем.
Источники информации
1. Пат. 2088948 Российская Федерация, МПК G01S 1/32. Фазовая радиогеодезическая система / В.И. Кокорин; заявитель и патентообладатель Научно-производственное объединение «Сибцветметавтоматика». - №4786719/09; заявл. 26.01.90; опубл. 27.03.97, бюл. №9. - 5 с.
2. Пат. 2457629 Российская Федерация, МПК H04L 29/02, G01S 3/46. Фазовая радионавигационная система. / A.M. Алешечкин; заявитель и патентообладатель ФГАОУ ВПО СФУ. - №2011128914/08; заявл. 12.07.2011; опубл. 27.07.2012, бюл. №21. -24 с.
3. Пономарев В. А. Разрешение неоднозначности в информационно-измерительных многошкальных приборах и системах / В.А. Пономарев, А.В. Пономарев, Т.М. Пономарева и др. - Санкт-Петербург: Изд. ВИКУ, 2001. - 163 с.
4. Шебшаевич B.C. Сетевые спутниковые радионавигационные системы / B.C. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др.; Под ред. B.C. Шебшаевича. - М.: Радио и связь, 1993. - 408 с.
5. Алешечкин A.M. Алгоритм автоматической подстройки частоты опорных генераторов радионавигационной системы «Крабик-БМ» // Современные проблемы радиоэлектроники: Сб. науч. тр. / Под ред. А.И. Громыко, А.В. Сарафанова. Красноярск: ИПЦ КГТУ, 2005. - 732 с. - С. 100-103.
Фазовая радионавигационная система, состоящая из не менее двух наземных и бортовой приемопередающих станций, в которой каждая наземная приемопередающая станция содержит приемопередающую антенну, антенный переключатель, приемник, усилитель-ограничитель, фазовый детектор, вычислительный блок, опорный генератор, синтезатор частот, коммутатор-формирователь, фазовращатель и передатчик, приемопередающая антенна соединена с антенным переключателем, выход которого соединен с первым входом приемника, выход которого через усилитель-ограничитель соединен с первым входом фазового детектора, выход фазового детектора соединен с входом вычислительного блока, выходы вычислительного блока соединены с управляющими входами опорного генератора, синтезатора частот, фазовращателя и коммутатора-формирователя, выход опорного генератора соединен с синтезатором частот, коммутатором-формирователем и вторым входом фазового детектора, выходы синтезатора частот соединены со вторым входом приемника и входом фазовращателя, выход которого соединен с первым входом передатчика, выходы коммутатора-формирователя подключены к третьему входу фазового детектора, к управляющему входу антенного переключателя и второму входу передатчика, выход которого соединен с входом антенного переключателя, бортовая приемопередающая станция содержит приемопередающую и приемную антенны, антенный переключатель, первый и второй приемники, первый и второй усилители-ограничители, первый и второй фазовые детекторы, вычислительный блок, индикатор, опорный генератор, синтезатор частот, коммутатор-формирователь и передатчик, приемопередающая и приемная антенны соединены с отдельными входами антенного переключателя, первый и второй выходы которого соединены с первыми входами первого и второго приемников соответственно, выходы первого и второго приемников через первый и второй усилители-ограничители соответственно соединены с первыми входами первого и второго фазовых детекторов, выходы первого и второго фазовых детекторов соединены соответственно с первым и вторым входами вычислительного блока, выходы вычислительного блока соединены с входом индикатора, управляющими входами опорного генератора, синтезатора частот и коммутатора-формирователя, выход опорного генератора соединен с синтезатором частот, коммутатором-формирователем и вторыми входами первого и второго фазовых детекторов, выходы синтезатора частот соединены со вторыми входами первого и второго приемников и с первым входом передатчика, выходы коммутатора-формирователя подключены к третьим входам первого и второго фазовых детекторов, к управляющему входу антенного переключателя и второму входу передатчика, выход которого соединен с входом антенного переключателя, отличающаяся тем, что в бортовую приемопередающую станцию введены вторая приемная антенна, третий приемник, третий усилитель-ограничитель и третий фазовый детектор, причем вторая приемная антенна выходом соединена с отдельным входом антенного переключателя, третий выход которого соединен с первым входом третьего приемника, второй вход которого подключен к выходу синтезатора частот, а выход через третий усилитель-ограничитель подключен ко второму входу третьего фазового детектора, управляющим входом соединенного с выходом коммутатора-формирователя, первый вход третьего фазового детектора подключен к выходу опорного генератора, выход третьего фазового детектора соединен с третьим входом вычислительного блока, при этом расположение антенн бортовой приемопередающей станции таково, что векторы линий, соединяющих приемопередающую антенну с первой приемной антенной и приемопередающую антенну со второй приемной антенной образовывают между собой фиксированный ненулевой угол в горизонтальной плоскости.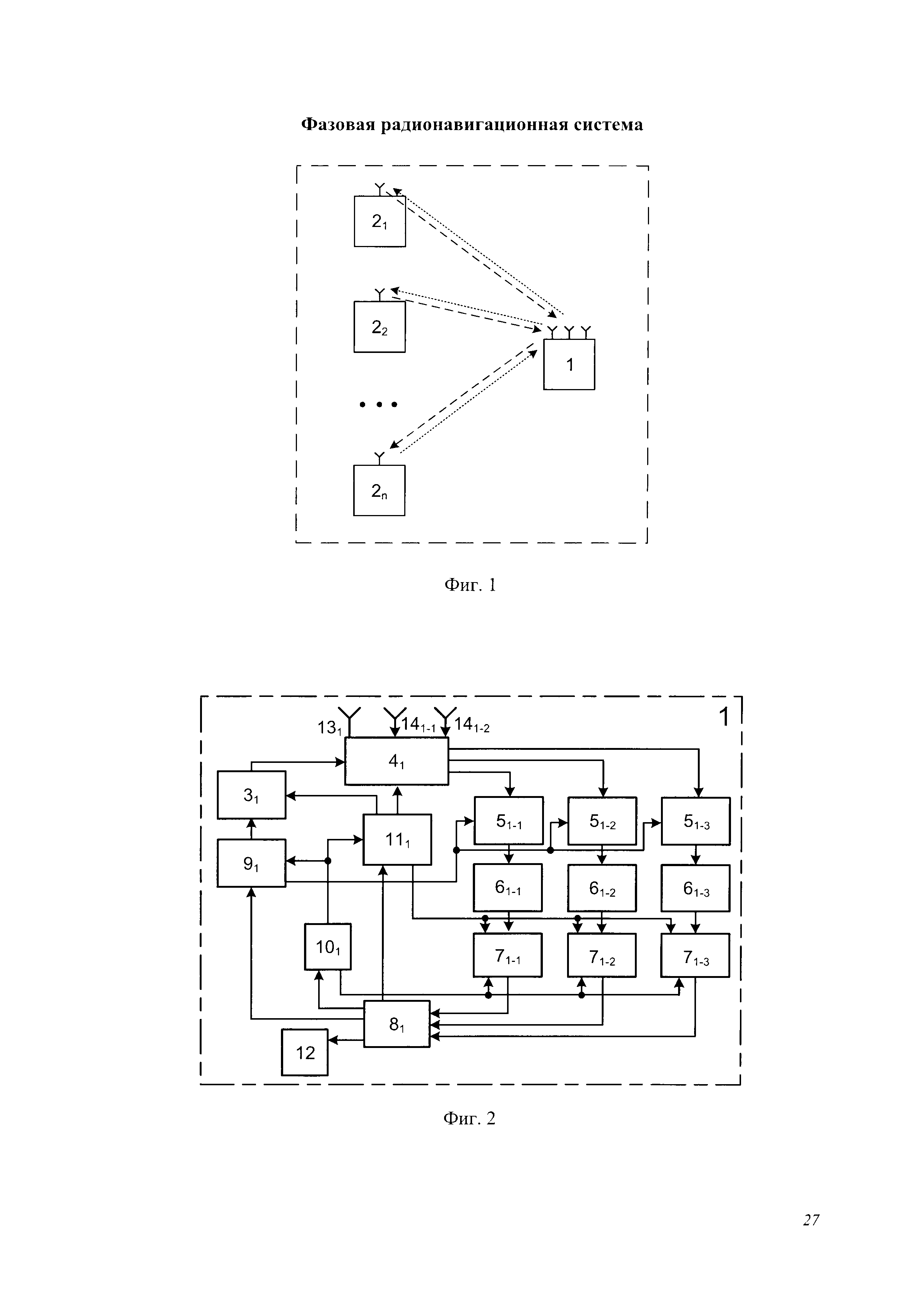
Способ получения слитка из сплавов цветных металлов
Способ получения полимерного нанокомпозиционного материала
Стенд для испытания зубчатых передач по замкнутому силовому контуру
Способ производства хлебобулочных изделий из замороженных полуфабрикатов
Электроразведочное устройство
Способ производства хлебобулочных изделий из полувыпеченных замороженных полуфабрикатов
Способ геоэлектроразведки и устройство для его осуществления
Способ определения термоокислительной стабильности смазочных материалов
Устройство для фокусировки типа "линза люнеберга"
Грузоподъемный механизм
Устройство для бестраншейной замены подземных трубопроводов
Устройство для бестраншейной замены подземных трубопроводов
Способ получения слитка из сплавов цветных металлов
Способ получения полимерного нанокомпозиционного материала
Стенд для испытания зубчатых передач по замкнутому силовому контуру
Способ производства хлебобулочных изделий из замороженных полуфабрикатов
Электроразведочное устройство
Способ производства хлебобулочных изделий из полувыпеченных замороженных полуфабрикатов
Способ геоэлектроразведки и устройство для его осуществления
Сырьевая смесь для изготовления керамических теплоизоляционных строительных материалов

