Результат интеллектуальной деятельности: СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ БЕСПЛАТФОРМЕННОГО ОРБИТАЛЬНОГО ГИРОКОМПАСА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области ориентации космических аппаратов (КА), а точнее к способу и устройству систем ориентации (СО) КА с использованием бесплатформенного орбитального гирокомпаса (БОГК).
Аналогом может служить техническое решение, изложенное в статье авторов А. Брайсона и В. Кортюма «Вычисление местного углового положения орбитального космического аппарата». Труды III Международного симпозиума ИФАК по автоматическому управлению в мирном использовании космического пространства. Управление в космосе, т. 2, с. 83-105, Москва, «Наука», 1972 г. Авторы рассматривают способ компенсации ошибок прибора ориентации по Земле (ПОЗ) и дрейфа гироскопов с использованием методов оптимальной фильтрации. Главный недостаток способа - принципиально исключена возможность компенсации влияния детерминированной ошибки ПОЗ в канале тангажа на точность ориентации КА по тангажу, а также необоснованное представления ошибок датчиков ориентации в виде белого шума, что ограничивает практическое применение способа для компенсации влияния ошибок ПОЗ на точность ориентации КА в каналах ориентации.
Известен также способ ориентации КА с применением БОГК, в котором решается задача компенсации ошибок ПОЗ на точность ориентации в канале курса. В данной системе в сигнал коррекции БИУС по курсу параллельно основному сигналу коррекции подмешивается проинтегрированный разностный сигнал ПОЗ по крену и выхода БОГК по крену. В результате добиваются компенсации влияния детерминированной ошибки ПОЗ по крену на точность ориентации КА по курсу, в то время как точность ориентации в канале крена, наоборот, ухудшается. Существенным недостатком способа является отсутствие компенсации влияния детерминированных ошибок ПОЗ по тангажу на точность ориентации КА по тангажу.
Наиболее близким аналогом является техническое решение, защищенное патентом РФ №2509690, в котором реализован способ ориентации КА с использованием БОГК, заключающийся в том, что в установившемся режиме ориентации измеряют разности сигналов прибора ориентации по Земле (ПОЗ) и выходного сигнала ОГК в каналах крена - εγ и тангажа - εϑ соответственно, которыми корректируют показания блока гироскопических измерителей угловых скоростей (БИУС) в каналах крена и курса - сигналом коррекции εγ, а в канале тангажа - сигналом εϑ. Данное техническое решение не позволяет компенсировать всю группу ошибок БОГК, а именно - исключить влияние ошибки ПОЗ в канале тангажа на точность ориентации КА по тангажу и исключить влияние ошибки ПОЗ по крену на точность ориентации КА по крену и курсу.
Целью предлагаемого решения является устранение указанных недостатков, т.е. создание способа и системы ориентации КА с использование БОГК, позволяющих автокомпенсировать ошибки ориентации КА относительно орбитальной системы координат (ОСК) в каналах курса, крена и тангажа, вызванные детерминированными ошибками ПОЗ по крену и тангажу, включая ошибки установки ПОЗ на КА относительно связанных осей.
Отличие заключается в том, что по сравнению с известным способом ориентации выполняют ряд других операций, позволяющих добиться поставленной цели. Для этого поворачивают КА по курсу на девяносто градусов с замещением канала гирокомпасирования крена на канал гирокомпасирования тангажа, а канал гирокомпасирования тангажа - на канал гирокомпасирования крена, продолжают ориентированный орбитальный полет в повернутом по курсу на девяносто градусов положении КА, вводят в разностный сигнал в канале тангажа εϑ сигнал автокомпенсации ошибок ПОЗ по тангажу µϑ, при этом новый сигнал коррекции БОГК в канале тангажа uϑ вычисляют по формуле
где uϑ - новый сигнал коррекции БОГК в канале тангажа;
εϑ - старый сигнал коррекции БОГК в канале тангажа;
µϑ - сигнал автокомпенсации детерминированных ошибок ПОЗ, включая ошибку установки ПОЗ относительно связанных осей КА по тангажу;
ϑпоз - сигнал ПОЗ по тангажу;
Δϑ - выходной сигнал БОГК по тангажу;
а - коэффициент интегрирования - автокомпенсации,
дожидаются завершения переходных процессов в контуре ориентации, запоминают накопленное значение сигнала автокомпенсации в канале тангажа  и отключают его накопление, выполняют обратный поворот КА по курсу и производят таким образом обратное замещение каналов крена и тангажа БОГК и вводят в канал коррекции БОГК по тангажу запомненное значение сигнала автокомпенсации
и отключают его накопление, выполняют обратный поворот КА по курсу и производят таким образом обратное замещение каналов крена и тангажа БОГК и вводят в канал коррекции БОГК по тангажу запомненное значение сигнала автокомпенсации  в качестве поправки на детерминированную ошибку ориентации БОГК в канале тангажа, при этом сигнал коррекции в канале тангажа вычисляют по формуле
в качестве поправки на детерминированную ошибку ориентации БОГК в канале тангажа, при этом сигнал коррекции в канале тангажа вычисляют по формуле

а для каналов крена и курса вводят в сигнал коррекции εγ сигнал автокомпенсации детерминированных ошибок ПОЗ по крену µγ, при этом новый сигнал коррекции БОГК в каналах крена и курса uγ вычисляют по формуле
где uγ - новый сигнал коррекции БОГК;
εγ - старый сигнал коррекции БОГК;
µγ - сигнал автокомпенсации детерминированных ошибок ПОЗ, включая ошибку установки ПОЗ относительно связанных осей КА по крену;
γпоз - сигнал ПОЗ по крену;
Δγ - выходной сигнал БОГК по крену;
b - коэффициент интегрирования - автокомпенсации.
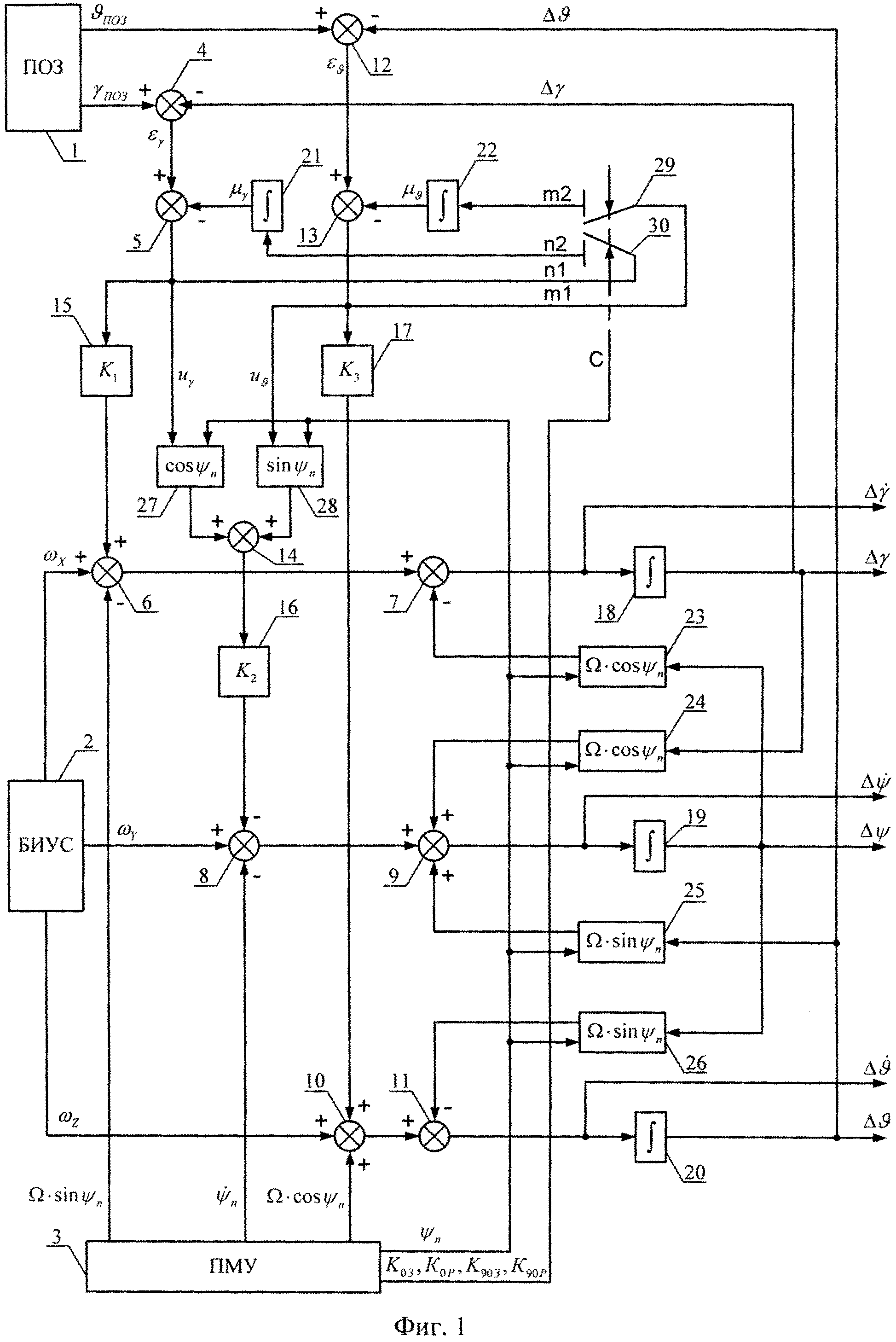
Для реализации приведенного выше способа предлагается система ориентации КА с использованием БОГК, содержащая в канале крена последовательно соединенные ПОЗ, первый сумматор, первый модуль усиления (МУ), второй сумматор, третий сумматор, первый интегратор, выход которого является входом в систему стабилизации КА по крену, содержащая в канале тангажа последовательно соединенные ПОЗ, четвертый сумматор, второй МУ, пятый и шестой сумматоры и второй интегратор, выход которого является входом в систему стабилизации КА по тангажу, содержащая в канале курса косинусный (КП) и синусный (СП) преобразователи и последовательно соединенные седьмой сумматор, третий МУ, восьмой и девятый сумматоры, третий интегратор, выход которого является входом в систему стабилизации КА по курсу, при этом входы КП и СП подключены к выходам первого и четвертого сумматоров соответственно, а выходы - соответственно к первому и второму входам седьмого сумматора, содержащая также блок гироскопических измерителей угловых скоростей (БИУС), программный модуль управления (ПМУ), а также первый, второй, третий и четвертый модули компенсации взаимовлияний каналов (МКВК) ориентации БОГК, при этом вторые входы второго, восьмого и пятого сумматоров подключены соответственно к выходам БИУС по каналам крена, курса и тангажа, выход первого интегратора подключен одновременно ко второму входу первого сумматора и к первому входу первого МКВК, выход которого соединен со вторым входом девятого сумматора, выход второго интегратора подключен одновременно ко второму входу четвертого сумматора и первому входу второго МКВК, выход которого соединен с третьим входом девятого сумматора, а выход третьего интегратора подключен одновременно к первым входам третьего и четвертого МКВК, выходы которых соединены со вторыми входами соответственно третьего и шестого сумматоров, при этом первый, второй и третий выходы ПМУ подключены соответственно к третьим входам второго, восьмого и пятого сумматоров, а четвертый выход ПМУ подключен одновременно ко вторым входам КП, СП и вторым входам первого второго, третьего и четвертого МКВК.
Предложение отличается тем, что в систему ориентации введены первый и второй ключи, четвертый и пятый интеграторы и в цепи первого и четвертого сумматоров введены десятый и одиннадцатый сумматоры соответственно, при этом выход десятого сумматора подключен одновременно к входу первого МУ, первому входу КС и первому ключу, выход одиннадцатого сумматора подключен одновременно к входу третьего МУ, первому входу СП и второму ключу, при этом выходы первого и второго ключей подключены к входам четвертого и пятого интеграторов соответственно, выходы которых подключены соответственно ко вторым входам десятого и одиннадцатого сумматоров.
Применение предлагаемого способа ориентации КА и соответствующей ему системы ориентации позволяют добиться полного исключения влияния детерминированных ошибок ПОЗ на точность ориентации КА во всех трех каналах ориентации КА - в каналах крена, курса и тангажа.
Покажем это на примере.
На фиг. 1 показано:
1 - прибор ориентации по Земле (ПОЗ);
2 - блок гироскопических измерителей угловых скоростей (БИУС);
3 - программный модуль управления (ПМУ);
4-14 - сумматоры;
15-17 - модули усиления;
18-22 - интеграторы;
23-26 - модули компенсации взаимовлияния каналов;
27-28 - косинусный и синусный преобразователи соответственно;
29, 30 - первый и второй ключи и соответствующие им команды К0З, К0Р и К90З, К90Р на их замыкание и размыкание;
m1, m2 - вход и выход первого ключа соответственно;
n1, n2 - вход и выход второго ключа соответственно;
γпоз, ϑпоз - выходные сигналы ПОЗ по крену и тангажу;
ωX, ωY, ωZ - выходные сигналы БИУС по крену, курсу и тангажу;
Δγ,  , ΔΨ,
, ΔΨ,  , Δϑ,
, Δϑ,  - выходные сигналы БОГК по углу и угловой скорости соответственно по крену, курсу и тангажу;
- выходные сигналы БОГК по углу и угловой скорости соответственно по крену, курсу и тангажу;
Ω - орбитальная угловая скорость КА;
ΨП - программный угол поворота КА по курсу относительно ОСК.
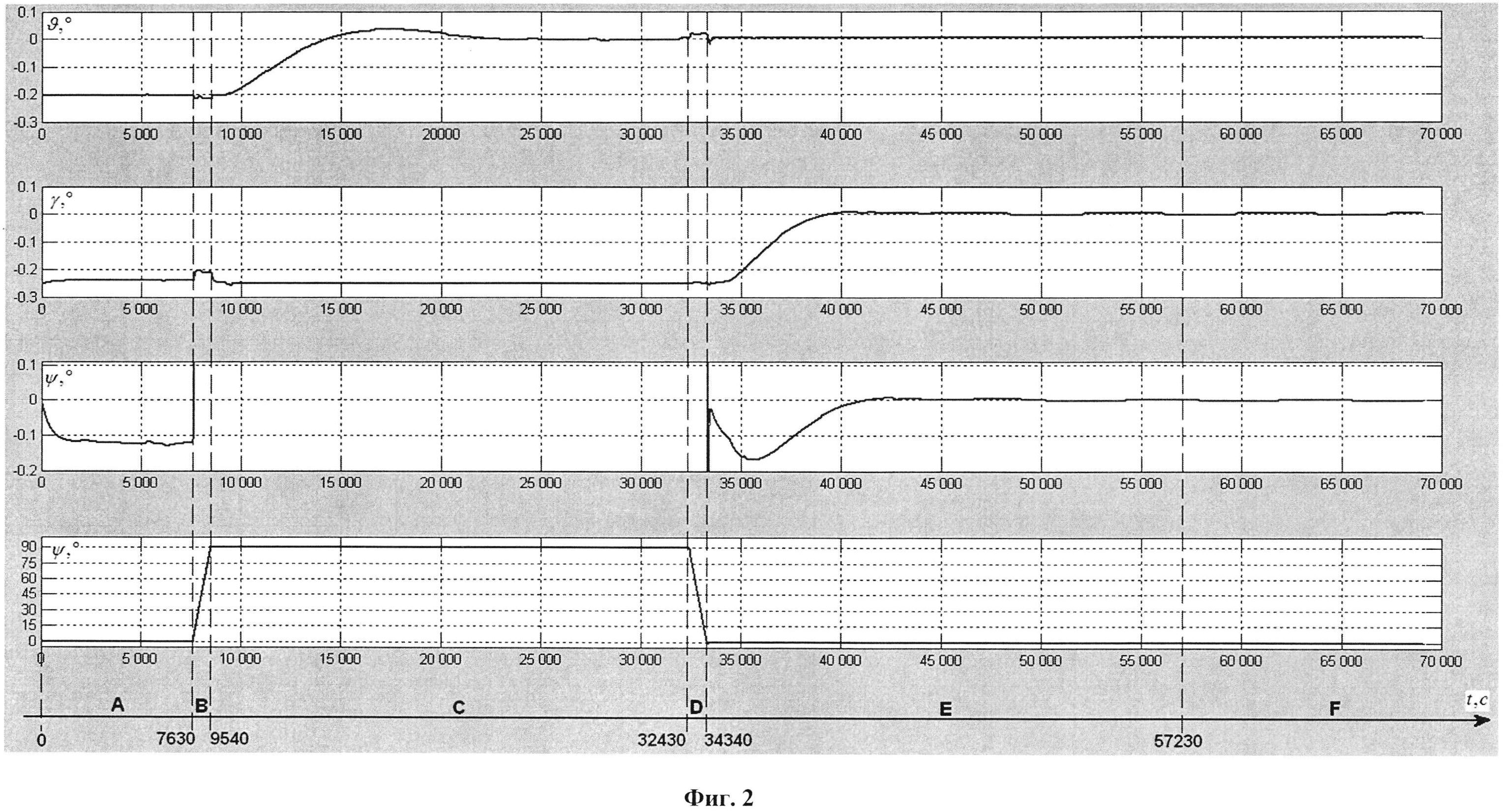
На фиг. 2 показаны:
- ошибки КА по тангажу ϑ, крену γ и курсу Ψ (сверху вниз) и программный угол поворота KA - ΨП относительно ОСК (все углы в градусной мере);
- участок А - начальное состояние КА и соответствующее ему положение БОГК в установившемся режиме для γПОЗ=0,25° и ϑПОЗ=0,2° (для стабилизации КА использовались маховые исполнительные органы);
- участок В - программный поворот КА на 90° (ΨП=90°);
- участок С - автокомпенсация в канале тангажа;
- участок D - обратный поворот КА на - 90° (ΨП=0);
- участок E - автокомпенсация в канале крена;
- участок F - полет КА с полностью скомпенсированными ошибками БОГК (КА) в каналах тангажа, крена и курса.
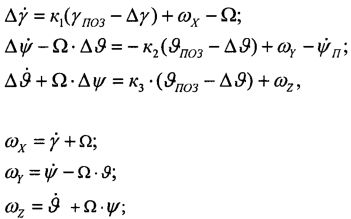
В исходном состоянии в соответствии с фиг. 1 линеаризованные уравнения системы ориентации имеют вид
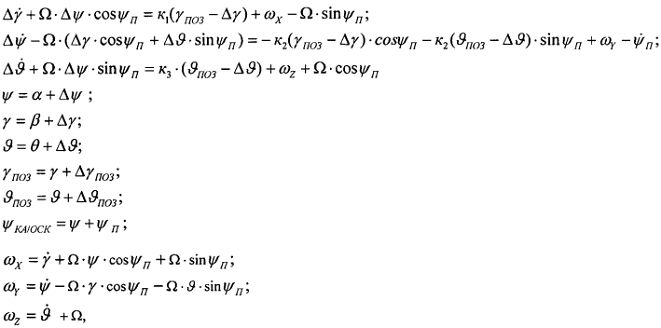
где
ΨKΑ/OCK - положение связанных осей KA относительно ОСК по курсу;
α, β, θ - положение (ошибки) приборных осей БОГК относительно ОСК соответственно в каналах курса, крена и тангажа;
Ψ, γ, ϑ - положение (ошибки) ориентации связанных осей КА относительно приборных осей БОГК соответственно по курсу, крену и танагажу;
ΔγΠОЗ, ΔϑПОЗ - детерминированные ошибки ПОЗ в каналах крена и тангажа, включая ошибки установки ПОЗ относительно связанных осей КА;
K1, K2, K3 - коэффициенты усиления МУ.
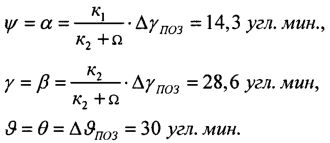
После завершения в системе переходных процессов (установившейся режим ориентации) -  (при ΨП=0) ошибки ориентации КА относительно ОСК по курсу, крену и тангажу будут соответственно равны
(при ΨП=0) ошибки ориентации КА относительно ОСК по курсу, крену и тангажу будут соответственно равны

Положим ошибки ПОЗ равными ΔγПОЗ=ΔϑПОЗ=30 угл. мин, коэффициенты модулей усиления  ,
,  , тогда ошибки ориентации КА будут равны
, тогда ошибки ориентации КА будут равны
Целью изобретения является полная компенсация указанных выше ошибок ориентации.
Согласно предлагаемому способу выполняют следующие операции:
1. Поворачивают КА по курсу на девяносто градусов (в положительную или отрицательную сторону, фиг. 2, участок В). С этой целью из ПМУ задают сигналы на программный поворот КА: Ω·cosΨП - на сумматор 10, Ω·sinΨП - на сумматор 6 и  - на сумматор 8. Одновременно вводят данные по текущему состоянию Ψп на МКВК 23-26 и СП и КП 27, 28. Знак поворота не имеет значения, для определенности формульные зависимости даны для ΨП>0°.
- на сумматор 8. Одновременно вводят данные по текущему состоянию Ψп на МКВК 23-26 и СП и КП 27, 28. Знак поворота не имеет значения, для определенности формульные зависимости даны для ΨП>0°.
По достижении программного поворота ΨП=90° происходит замещение каналов гирокомпасирования: канал крена БОГК замещается на канал тангажа, а канал тангажа - на канал крена, точное замещение происходит автоматически в точке ΨП=90°, при этом уравнения движения БОГК примут вид для ΨП=90° (фиг. 2, участок В)
В процессе движения KA летит боком вперед, канал «бывшего» крена для такого устойчивого положения ориентации становится по отношению к ОСК тангажом, а канал тангажа - креном.
2. Продолжают ориентированный орбитальный полет в повернутом по курсу на девяносто градусов положении КА (фиг. 2, участок С).
3. Вводят в сигнал коррекции в канале тангажа εϑ сигнал автокомпенсации ошибок ПМВ по тангажу µϑ. Для этого с ПМУ подается команда К90З на замыкание ключа 29, при этом новый сигнал коррекции БОГК в канале тангажа uϑ вычисляют по формуле (фиг. 2, участок С, завершение автокомпенсации ~ на 25000 с)
где uϑ - новый сигнал коррекции БОГК в канале тангажа;
εϑ - старый сигнал коррекции БОГК в канале тангажа;
µϑ - сигнал автокомпенсации детерминированных ошибок ПОЗ, включая ошибку установки ПОЗ относительно связанных осей КА по тангажу;
а - коэффициент интегрирования - автокомпенсации.
4. Дожидаются установившегося режима ориентации - завершения переходного процесса в контуре БОГК (фиг. 2, участок С, время t~25000 с).
5. Запоминают накопленное значение сигнала автокомпенсации в канале тангажа  и отключают его накопление (фиг. 2, участок С, время t>25000 с), для этого выдается команда К90Р, в результате чего ключ 29 размыкается, накопление поправки прекращается, а на выходе интегратора 22 запоминается последнее значение накопленной поправки
и отключают его накопление (фиг. 2, участок С, время t>25000 с), для этого выдается команда К90Р, в результате чего ключ 29 размыкается, накопление поправки прекращается, а на выходе интегратора 22 запоминается последнее значение накопленной поправки  .
.
6. Выполняют обратный поворот КА по курсу (фиг. 2, участок D) для Ψn=0° аналогично п. 1. КА поворачивается в исходное положение, при этом автоматически происходит обратное замещение каналов крена и тангажа БОГК, каналы ориентации занимают исходное положение.
7. Вводят в канал коррекции БОГК по тангажу запомненное значение сигнала автокомпенсации  в качестве поправки на детерминированную ошибку ориентации БОГК в канале тангажа, при этом сигнал коррекции в канале тангажа вычисляют по формуле
в качестве поправки на детерминированную ошибку ориентации БОГК в канале тангажа, при этом сигнал коррекции в канале тангажа вычисляют по формуле

8. Для каналов крена и курса (фиг. 2, участок Е) вводят в сигнал коррекции εγ сигнал автокомпенсации детерминированных ошибок ПМВ по крену µγ. Для этого замыкают ключ 30 по команде К0З из ПМУ, при этом новый сигнал коррекции БОГК в каналах крена и курса uγ вычисляют по формуле
где uγ - новый сигнал коррекции БОГК;
εγ - старый сигнал коррекции БОГК;
µγ - сигнал автокомпенсации детерминированных ошибок ПОЗ, включая ошибку установки ПОЗ относительно связанных осей КА по крену;
γпоз - сигнал ПОЗ по крену;
Δγ - выходной сигнал БОГК по крену;
b - коэффициент интегрирования - автокомпенсации.
9. После завершения переходных процессов в контуре ориентации ошибки КА в каналах крена и курса полностью скомпенсированы (фиг. 2, участок F). В дальнейшем ключ 30 может быть разомкнут по команде К0Р или оставаться замкнутым (что не оговаривается особо в предлагаемом изобретении). В обоих случаях происходит автоматическая компенсация детерминированных ошибок ПОЗ.
Таким образом, использование предложенного технического решения позволяет полностью автокомпенсировать ошибки ориентации КА относительно ОСК во всех трех каналах ориентации - курса, крена и тангажа, вызванные детерминированными ошибками ПОЗ по крену и тангажу, включая ошибки установки ПОЗ на КА относительно связанных осей.
Способ изготовления деталей из титановых сплавов
Шаровая опора
Гирокомпасная система ориентации искусственного спутника земли
Способ коррекции и устройство орбитального гирокомпаса для управления угловым движением космического аппарата
Искусственный спутник земли
Шаровая опора
Система электропитания космического аппарата
Пружинное устройство нагружения
Способ поражения надводных и наземных целей гиперзвуковой крылатой ракетой и устройство для его осуществления
Шаровая опора
Способ изготовления деталей из титановых сплавов
Шаровая опора
Гирокомпасная система ориентации искусственного спутника земли
Способ коррекции и устройство орбитального гирокомпаса для управления угловым движением космического аппарата
Искусственный спутник земли
Шаровая опора
Система электропитания космического аппарата
Пружинное устройство нагружения
Способ поражения надводных и наземных целей гиперзвуковой крылатой ракетой и устройство для его осуществления
Шаровая опора

