Результат интеллектуальной деятельности: ФАЗОВЫЙ РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ
Вид РИД
Изобретение
Изобретение относится к радионавигации и может быть использовано в локальных навигационных системах и сетях для управления движением мобильных объектов в локальных зонах навигации.
Известен защищенный патентом РФ №2204145, кл. G01S 3/46, 2003, способ определения координат источника излучения, основанный на приеме его сигнала тремя антеннами, образующими ортогональные базы.
Такое действие, как определение направления на источник излучения, является существенным признаком и заявляемого способа.
Известен также защищенный патентом РФ №2013785, кл. G01S 13/00, 1994, способ определения местоположения подвижных объектов, заключающийся в излучении кодированных сигналов передатчиками объектов, приеме сигналов в N пространственно разнесенных пунктах с последующей ретрансляцией их на центральный приемный пункт и измерении задержек между принятыми сигналами.
Ретрансляция сигналов на центральный приемный пункт является существенным признаком и заявляемого способа.
Причиной, препятствующей достижению в этих аналогах, защищенных патентами РФ, технического результата, обеспечиваемого изобретением, является необходимость использования достаточно сложной системы единого времени.
Известен разностно-дальномерный способ определения местоположения мобильных объектов, заключающийся в поочередном излучении сетью опорных навигационных пунктов, расположенных в точках пространства с известными координатами, когерентных гармонических сигналов, их приеме на мобильном объекте, принятых от каждого опорного объекта и вычислении по ним координат мобильного объекта [Бакулев П.А., Сосновский А.А. Радиолокационные и радионавигационные системы. - М.: Радио и связь, 1994, с. 211-214].
Измерение фазовых сдвигов сигналов и вычисление по ним координат мобильного объекта является существенным признаком и заявляемого способа.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является необходимость в использовании высокоточной шкалы единого времени на объекте навигации и сложность реализации при больших расстояниях между опорными радионавигационными точками и объектом навигации.
Наиболее близким по технической сущности к заявляемому (прототипом) является обращенный разностно-дальномерный способ определения координат [Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А. Фазовый метод определения координат. - М.: Сов. радио, 1979, с. 10-11, с. 97-100].
Способ заключается в одновременном излучении объектом навигации и передатчиком, установленным в неподвижной точке с известными координатами, непрерывных гармонических высокочастотных сигналов и одновременном приеме указанных гармонических сигналов в нескольких опорных радионавигационных точках.
Такие действия, как излучение высокочастотных гармонических сигналов объектом навигации и прием излучаемых гармонических высокочастотных сигналов в опорных радионавигационных точках с известными координатами, являются существенными признаками и заявляемого способа.
Причиной, препятствующей достижению в способе-прототипе технического результата, обеспечиваемого изобретением, является отсутствие возможности оценки координат одновременно нескольких объектов навигации.
Еще одной причиной, препятствующей достижению в способе-прототипе технического результата, обеспечиваемого изобретением, является возникновение дополнительных погрешностей измерения координат мобильного объекта, вызванных неточностью определения координат передатчика, установленного в неподвижной точке.
Кроме того, в этом способе необходимо непрерывное излучение сигнала неподвижным передатчиком. Это ухудшает условия электромагнитной совместимости оборудования. Возникает необходимость одновременного приема и передачи двух сигналов с близкими частотами, что ухудшает условия обеспечения информационной безопасности оборудования и облегчает возможность подавления его работы потенциальным злоумышленником. Указанные обстоятельства существенно снижают помехозащищенность аппаратуры, реализующей данный способ.
Технической задачей, на решение которой направлено изобретение, является обеспечение возможности одновременной оценки координат одновременно нескольких объектов навигации, а также повышение точности определения координат объектов навигации и помехозащищенности аппаратуры, реализующей предлагаемый способ.
Для достижения указанного технического результата в известном фазовом разностно-дальномерном способе определения местоположения объектов навигации, заключающемся в том, что излучают с объекта навигации первый высокочастотный гармонический сигнал, принимают его в нескольких опорных радионавигационных точках с известными координатами, с объектов навигации вместе с первым дополнительно излучают второй высокочастотный гармонический сигнал, отличающийся по частоте от первого на заданную величину, в каждой из опорных радионавигационных точек из принятых высокочастотных сигналов формируют сигналы разностной частоты и передают их в центральный пункт обработки, где измеряют разности фаз сигналов разностной частоты, полученных из разных опорных радионавигационных точек, а результаты этих измерений с учетом взаимного расположения опорных радионавигационных точек, центрального пункта обработки и величины разностной частоты пересчитывают в координаты объектов навигации, при этом высокочастотные сигналы с любого объекта навигации излучают в течение ограниченного интервала времени, достаточного для измерения разности фаз сигналов разностной частоты, и лишь в том случае, если с других объектов навигации высокочастотные сигналы к началу этого интервала времени не излучают.
Сущность изобретения поясняется чертежом, на котором приведены:
- на фиг. 1 - взаимное расположение объекта навигации, трех опорных радионавигационных точек и центрального пункта обработки (ЦПО);
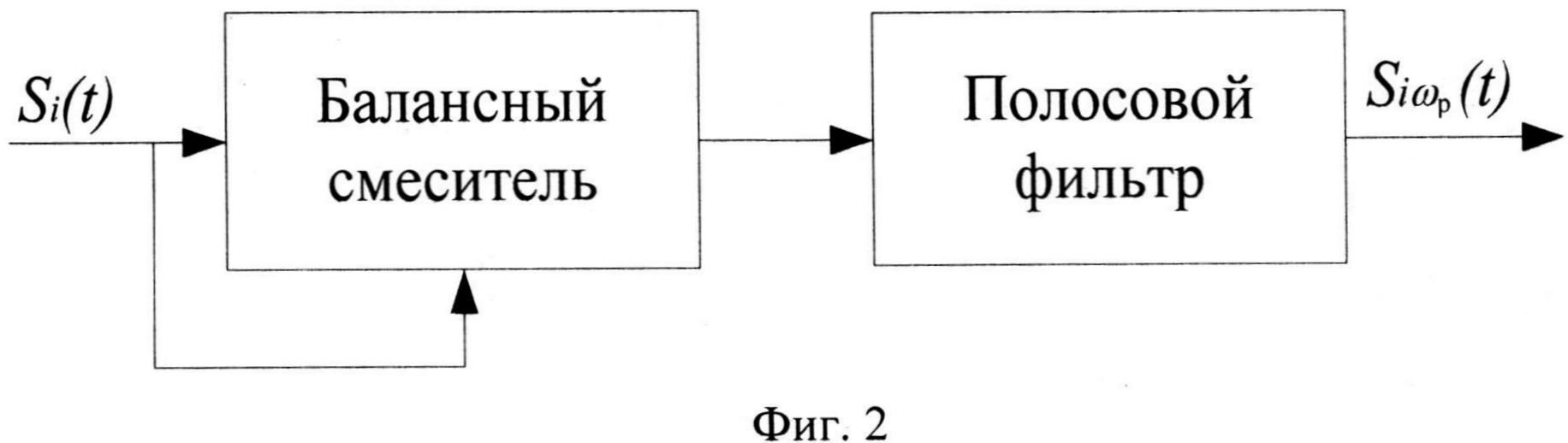
- на фиг. 2 - структура формирователя сигнала разностной частоты.
Способ реализуется с помощью трех опорных радионавигационных точек с известными координатами, ЦПО и объекта навигации.
Функционирование способа поясняется фиг. 1, на которой показаны объект навигации (OH), находящийся в точке с неизвестными координатами X и Y, опорные радионавигационные точки ОРТ1, ОРТ2 и ОРТ3, расположенные в точках с известными координатами X1 и Y1, X2 и Y2 и X3 и Y3 соответственно. Там же показаны расстояния D1, D2, D3 между объектом навигации и опорными радионавигационными точками, расстояния R1, R2, R3 между ЦПО и этими опорными точками, а также направление N на север.
Процесс измерения координат рассмотрим на примере одного объекта навигации. Вопрос взаимодействия с другими объектами навигации рассмотрим позже. Пока в первом приближении будем считать, что объект навигации один и для определения его координат имеется возможность в течение короткого промежутка времени, порядка 0,3 мс, излучать сумму двух гармонических высокочастотных сигналов с близкими частотами ω0, и ω1:

Эти сигналы имеют амплитуды А и начальные случайные фазы φ0 и φ1.
Излученный объектом навигации сигнал SOH(t) принимается в точках ОРТ1, ОРТ2 и ОРТ3 на расстояниях D1, D2 и D3 соответственно от объекта навигации:



где С=3·108 м/с - скорость распространения радиоволн в атмосфере.
В каждой из опорных радионавигационных точек ОРТ1, ОРТ2 и ОРТ3 формируют сигналы разностной частоты.
Структура формирователя сигналов разностной частоты приведена на фиг.2. Он представляет собой последовательно включенные балансный смеситель и узкополосный полосовой фильтр, настроенный на разностную частоту  .
.
В каждой из опорных радионавигационных точек сигнал  , представляющий собой сумму двух высокочастотных гармонических сигналов с частотами ω0 и ω1, поступает на оба входа балансного смесителя.
, представляющий собой сумму двух высокочастотных гармонических сигналов с частотами ω0 и ω1, поступает на оба входа балансного смесителя.
На выходе балансного смесителя формируется сумма постоянного напряжения и четырех гармонических сигналов с частотами 2ω0, 2ω1 ω0+ω1 и разностной частотой ωр (частотой биений). Все эти гармонические сигналы, за исключением сигнала с частотой биений подавляются, фильтром.
Сигналы разностной частоты, формируемые в каждой из опорных радионавигационных точек, имеют вид:



где φ0-φ1 - случайные фазовые сдвиги первого (опорного) и второго высокочастотных гармонических сигналов, излучаемых объектом навигации.
Нетрудно видеть, что сигналы, формируемые в каждой из опорных радионавигационных точек, различаются по фазам, которые определяются расстояниями D1, D2 и D3 соответственно. Эти сигналы по проводам передаются в ЦПО.
В ЦПО принимаются три следующих сигнала:
1) сигнал, поступивший из ОРТ1:

Он отличается от сигнала SOPT1(t) амплитудой и дополнительным фазовым сдвигом  , который обусловлен прохождением расстояния R1, разделяющего ОРТ1 и ЦПО.
, который обусловлен прохождением расстояния R1, разделяющего ОРТ1 и ЦПО.
Этот сигнал можно представить в следующем виде:

где 
2) сигнал, поступивший из точки ОРТ2:

В данном случае дополнительный фазовый сдвиг равен 
Этот сигнал также можно представить в виде:

где 
3) сигнал, поступивший из ОРТ3:

В данном случае дополнительный фазовый сдвиг равен 
Этот сигнал также можно записать в виде

где 
Найдем разность фаз  сигналов SOPT2 и SOPT1 и разность фаз Δψ23=ψ2-ψ3 сигналов SOPT2 и SOPT3:
сигналов SOPT2 и SOPT1 и разность фаз Δψ23=ψ2-ψ3 сигналов SOPT2 и SOPT3:


В параметрах Δψ21 и Δψ23 отсутствуют случайные фазовые сдвиги φ0 и φ1.
Исключив из последних выражений для Δψ21 и Δψ23 известные фазовые сдвиги  , получим окончательные выражения для расчета неизвестных координат объекта навигации - разность Δψ21 фаз сигналов разностной частоты, сформированных второй и первой опорными точками, а также разность Δψ23 фаз сигналов разностной частоты, сформированных второй и третьей опорными точками:
, получим окончательные выражения для расчета неизвестных координат объекта навигации - разность Δψ21 фаз сигналов разностной частоты, сформированных второй и первой опорными точками, а также разность Δψ23 фаз сигналов разностной частоты, сформированных второй и третьей опорными точками:
Указанные разности фаз однозначно соответствуют разностям дальностей D2-D1 и D2-D3 соответственно.
Это позволяет сделать вывод, что по результатам измерений параметров Δψ21 и Δψ23 могут быть рассчитаны величины D1, D2 и D3 - расстояния между объектом навигации и опорными радионавигационными точками, а следовательно, и координаты объекта навигации.
Ниже приведен алгоритм пересчета результатов измерения разности фаз сигналов разностной частоты в координаты объекта навигации. Этот алгоритм применим для локальных навигационных систем, когда вполне допустимо пренебречь сферичностью Земли.
Исходными данными для расчета являются:
- разность Δψ21 фаз сигналов разностной частоты для первой и второй радионавигационных точек;
- разность Δψ23 фаз сигналов разностной частоты для третьей и второй радионавигационных точек.
Кроме того, в расчете используются следующие константы:
- значение первой высокой частоты ω0;
- значение второй высокой частоты ω1;
- скорость распространения радиоволн в атмосфере С;
- расстояния R1, R2, и R3 между центральным пунктом обработки ЦПО и опорными радионавигационными точками ОРТ1, ОРТ2 и ОРТ3.
Порядок расчета следующий.
1. По измеренным значениям разностей фаз Δψ21 и Δψ23 вычисляются разности расстояний от объекта навигации до опорных радионавигационных точек
Здесь D1, D2, D3 - расстояния от объекта навигации (OH) до первой ОРТ1, второй ОРТ2 и третьей ОРТ3 опорных радионавигационных точек в соответствии с фиг.1.
2. Величины ΔD21 и ΔD23 нормируются по длинам базовых линий (R21 и R23) и вычисляется нормирующий коэффициент γ:

3. Вычисляются постоянные параметры:
а=α21-α23; b=γ·Δd23-Δd21,
где α21 - угол между направлением на север и базовой линией R21;
α23 - угол между направлением на север и базовой линией R23.
4. Составляется уравнение для расчета угла β23 между базовой линией R23 и направлением на объект навигации:
Cos(a-β23)-γ·Cosβ23=b
Это уравнение решается относительно угла β23 итерационным методом.
5. Вычисляются координаты объекта навигации в местной прямоугольной системе координат, начало которой находится в точке ОРТ2:


При необходимости координаты объекта навигации пересчитываются в исходную прямоугольную систему координат;


В предлагаемом способе исключена присущая способу-прототипу составляющая погрешности определения координат неподвижного передатчика второго гармонического высокочастотного сигнала. В предлагаемом способе этот передатчик не используется, а используется тот же передатчик, что и для первого гармонического сигнала. Следовательно, точность измерения координат в предлагаемом способе выше, чем в прототипе.
Кроме того, в предлагаемом способе отсутствует необходимость в непрерывном излучении второго гармонического сигнала, поскольку он может излучаться лишь в промежутки времени, достаточные для измерения разности фаз сигналов разностной частоты. Это время не превышает долей миллисекунды. Малое время излучения сигнала затрудняет его обнаружение, а следовательно, и подавление потенциальным противником. Это значительно повышает помехоустойчивость аппаратуры, реализующей способ, по сравнению с прототипом.
Таким образом, рассмотрев процесс определения координат применительно к функционированию одного объекта навигации можно сделать вывод, что точность измерения координат в предлагаемом способе выше, чем в прототипе, а за счет малого времени излучения помехоустойчивость аппаратуры, реализующей способ, тоже выше, чем в прототипе.
Рассмотрим теперь функционирование способа, когда объектов навигации несколько. Как уже отмечалось, работа любого объекта навигации на излучение осуществляется в течение достаточно короткого промежутка времени, длительностью порядка 0,3 мс. Этого времени достаточно для проведения измерений разности фаз сигналов разностной частоты, поступивших в ЦПО от разных опорных радионавигационных точек для объектов навигации, движущихся со скоростями до 120 км/ч, поскольку за время измерения положение объекта в пространстве изменится не более чем на 0,1 см. При одновременном излучении двумя и более объектами навигации высокочастотных сигналов они могут совпасть во времени в опорных радионавигационных точках. Это нарушит нормальную работу системы. Вероятность совпадения высокочастотных сигналов определяется, с одной стороны, требуемой скоростью обновления информации о текущих координатах этого объекта, а с другой - общим числом объектов навигации, находящихся в зоне действия системы навигации, реализующей предлагаемый способ. При небольшом количестве объектов навигации, находящихся в зоне действия навигационной системы, в которой реализован предлагаемый способ, вероятность совпадения во времени излучений с разных объектов достаточно мала, например, для систем навигации с числом одновременно обслуживаемых объектов, не превышающим 5 ч 6, указанная вероятность совпадения во времени сигналов, излучаемых двумя объектами не превышает 0,01. С расширением зоны обслуживания и увеличением числа одновременно обслуживаемых объектов эта вероятность существенно возрастает, и ее величина может оказаться неприемлемой, например, для систем управления транспортом.
Для исключений ситуаций с одновременными излучениями высокочастотных сигналов с разных объектов навигации на них устанавливаются приемные устройства, с помощью которых контролируется наличие излучений с других объектов навигации. Перед началом излучения высокочастотных сигналов любой объект навигации с помощью этого приемного устройства проверяет наличие излучений каких-либо других объектов навигации в данной локальной сети. При обнаружении таковых начало излучения задерживается до окончания обнаруженного излучения. Вследствие этого высокочастотные сигналы излучаются объектами навигации поочередно, и одновременные излучения двух и более объектов исключаются. Это позволяет правильно определить координаты каждого из них.
Таким образом, в предлагаемом способе, в отличие от прототипа, обеспечивается одновременная оценка координат нескольких объектов навигации.
Техническая реализация способа не вызывает затруднений.
Для реализации высокочастотных сигналов может быть выбран диапазон 1200-1400 МГц. В этом диапазоне легко обеспечить выполнение условия узкополосности для двухчастотного сигнала и излучение двух гармонических сигналов из практически совпадающих двух фазовых центров. Это позволяет использовать для двухчастотного сигнала на мобильном объекте одну антенну, причем фазовые центры излучения гармонических сигналов практически совпадают.
Для приема гармонических сигналов на мобильном объекте можно использовать интегральные СВЧ-усилители - микросхемы типа SPF5122Z,
Для приема гармонических сигналов в опорных радионавигационных точках можно также использовать интегральные СВЧ-усилители - микросхемы типа SPF5122Z. В качестве узла формирования сигнала разностной частоты можно использовать смеситель на транзисторе BFP620, в качестве нагрузки которого служит фильтр нижних частот.
Передачу сигналов разностной частоты из опорных радионавигационных точек в ЦПО можно реализовать по проводным каналам.
Измерение разности фаз сигналов разностной частоты в ЦПО может быть реализовано с помощью фазовых детекторов на микросхеме SYPD-1.
Формирование двух гармонических сигналов (основного и дополнительного) на объекте навигации можно реализовать на основе двух синтезаторов частоты, синхронизируемых общим опорным генератором, и сумматора.
Способ может найти применение для построения локальных навигационных систем управления движением транспорта в местах повышенной опасности, где требуется высокоточное определение местоположения высокоскоростных движущихся объектов на критических участках трасс их движения (например, при приближении к местам переключения стрелок на железнодорожных путях, вблизи крутых закрытых поворотов автомобильных трасс).
Фазовый разностно-дальномерный способ определения местоположения объектов навигации, заключающийся в том, что излучают с объектов навигации первый высокочастотный гармонический сигнал, принимают его в нескольких опорных радионавигационных точках с известными координатами, отличающийся тем, что с объектов навигации вместе с первым дополнительно излучают второй высокочастотный гармонический сигнал, отличающийся по частоте от первого на заданную величину, в каждой из опорных радионавигационных точек из принятых высокочастотных сигналов формируют сигналы разностной частоты и передают их в центральный пункт обработки, где измеряют разности фаз сигналов разностной частоты, полученных из разных опорных радионавигационных точек, а результаты этих измерений с учетом взаимного расположения опорных радионавигационных точек, центрального пункта обработки и величины разностной частоты пересчитывают в координаты объектов навигации, при этом высокочастотные сигналы с любого объекта навигации излучают в течение ограниченного интервала времени, достаточного для измерения разности фаз сигналов разностной частоты, и лишь в том случае, если с других объектов навигации высокочастотные сигналы к началу этого интервала времени не излучают.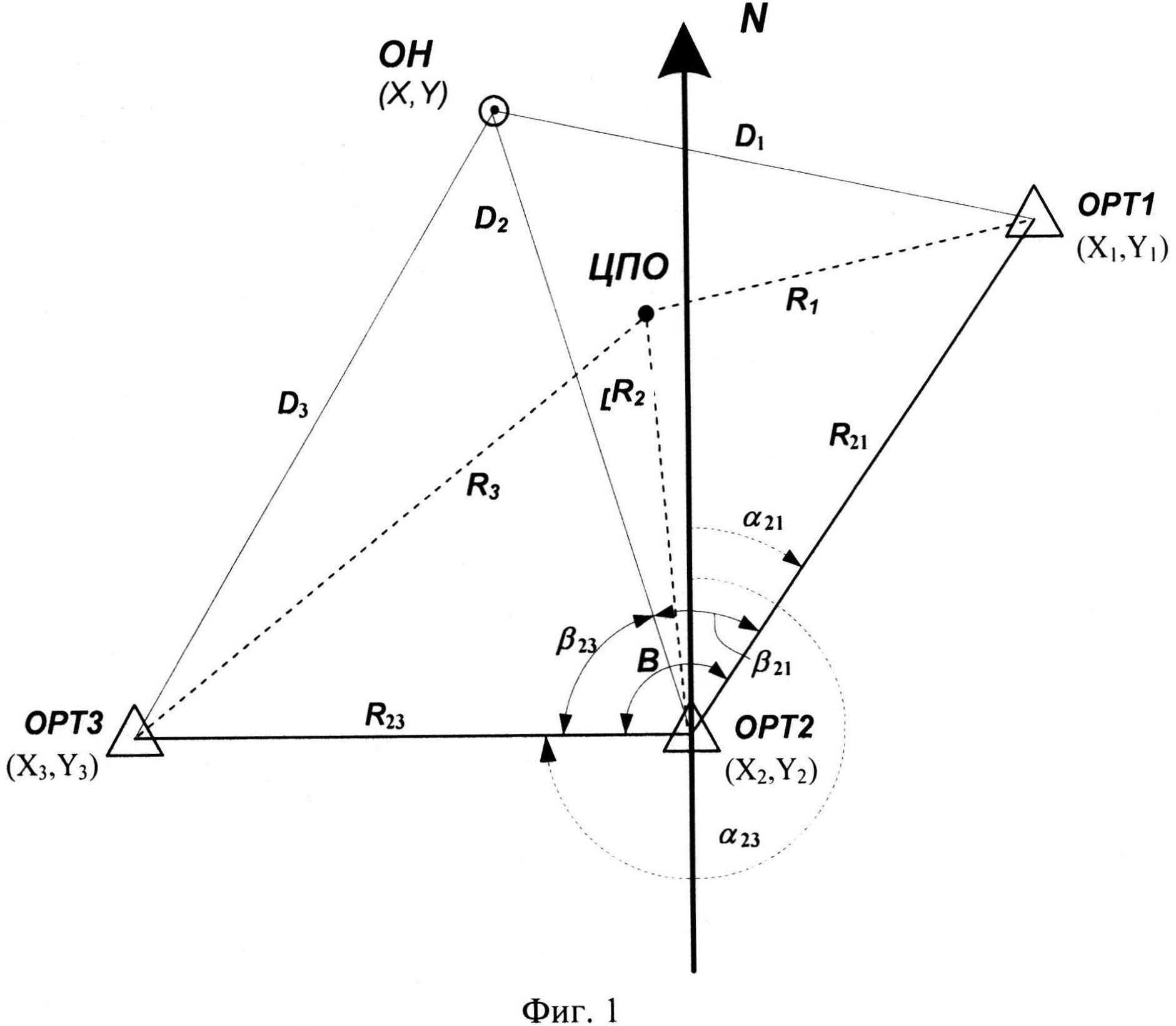
Способ определения местоположения объекта навигации
Приемопередающая широкодиапазонная антенная решетка наклонной поляризации из 2*n-пар v-образных вибраторов, расположенных в плоскости
Приемопередающая антенная решетка наклонной поляризации из 2·n-пар v-образных вибраторов, направленных в одну сторону в пространстве
Система для измерения координат объекта навигации
Однофотонный приемник для пространственно-временного поиска оптических импульсных сигналов
Способ импрегнирования абразивных инструментов
Способ управления подвижным объектом
Способ определения местоположения объекта навигации
Способ определения местоположения объектов для систем локальной навигации
Фазоразностный способ определения местоположения объекта навигации
Способ определения местоположения объекта навигации
Приемопередающая широкодиапазонная антенная решетка наклонной поляризации из 2*n-пар v-образных вибраторов, расположенных в плоскости
Приемопередающая антенная решетка наклонной поляризации из 2·n-пар v-образных вибраторов, направленных в одну сторону в пространстве
Система для измерения координат объекта навигации
Однофотонный приемник для пространственно-временного поиска оптических импульсных сигналов
Способ импрегнирования абразивных инструментов
Способ управления подвижным объектом
Способ определения местоположения объекта навигации
Способ определения местоположения объектов для систем локальной навигации
Фазоразностный способ определения местоположения объекта навигации

