Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА НАВИГАЦИИ
Вид РИД
Изобретение
Изобретение относится к радионавигации и может быть использовано в локальных навигационных системах и сетях для управления движением мобильных объектов в локальных зонах навигации.
Известен защищенный патентом РФ №2204145, кл. G01S 3/46, 2003, способ определения координат источника излучения, основанный на приеме его сигнала тремя антеннами, образующими ортогональные базы.
Такое действие, как определение направления на источник излучения, является существенным признаком и заявляемого способа.
Известен также защищенный патентом РФ №2013785, кл. G01S 13/00, 1994, способ определения местоположения подвижных объектов, заключающийся в излучении кодированных сигналов передатчиками объектов, приеме сигналов в N пространственно разнесенных пунктах с последующей ретрансляцией их на центральный приемный пункт и измерении задержек между принятыми сигналами.
Ретрансляция сигналов на центральный приемный пункт является существенным признаком и заявляемого способа.
Причиной, препятствующей достижению в этих аналогах, защищенных патентами РФ, технического результата, обеспечиваемого изобретением, является необходимость использования достаточно сложной системы единого времени.
Известен разностно-дальномерный способ определения местоположения мобильных объектов, заключающийся в поочередном излучении сетью опорных навигационных пунктов, расположенных в точках пространства с известными координатами, когерентных гармонических сигналов, их приеме на мобильном объекте, принятых от каждого опорного объекта, и вычислении по ним координат мобильного объекта [Бакулев П.А., Сосновский А.А. Радиолокационные и радионавигационные системы. - М.: Радио и связь, 1994, с. 211-214].
Измерение фазовых сдвигов сигналов и вычисление по ним координат мобильного объекта является существенным признаком и заявляемого способа.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является необходимость в использовании высокоточной шкалы единого времени на объекте навигации и сложность реализации при больших расстояниях между опорными радионавигационными точками и объектом навигации.
Наиболее близким по технической сущности к заявляемому (прототипом) является обращенный разностно-дальномерный способ определения координат [Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А. Фазовый метод определения координат. - М.: Сов. радио, 1979, с. 10-11, с. 97-100].
Способ заключается в одновременном излучении объектом навигации и передатчиком, установленным в неподвижной точке с известными координатами, непрерывных гармонических высокочастотных сигналов и одновременном приеме указанных гармонических сигналов в нескольких опорных радионавигационных точках.
Такие действия, как излучение высокочастотных гармонических сигналов объектом навигации и прием излучаемых гармонических высокочастотных сигналов в опорных радионавигационных точках с известными координатами являются существенными признаками и заявляемого способа.
Причиной, препятствующей достижению в способе-прототипе технического результата, обеспечиваемого изобретением, является то обстоятельство, что координаты неподвижного передатчика всегда определяются с некоторой погрешностью, что приводит в конечном итоге к снижению точности измерения координат объекта навигации.
Еще одной причиной, препятствующей обеспечению в способе-прототипе технического результата, обеспечиваемого изобретением, является необходимость непрерывного излучения сигнала неподвижным передатчиком. Это ухудшает условия электромагнитной совместимости оборудования. Возникает необходимость одновременного приема и передачи двух сигналов с близкими частотами, что ухудшает условия обеспечения информационной безопасности оборудования и облегчает возможность подавления его работы потенциальным злоумышленником. Указанные обстоятельства существенно снижают помехозащищенность устройств, реализующих данный способ.
Технической задачей, на решение которой направлено изобретение, является повышение точности определения местоположения объекта навигации и помехозащищенности устройств, реализующих предлагаемый способ.
Для достижения указанного технического результата в известном способе определения местоположения объекта навигации, заключающемся в излучении объектом навигации высокочастотного гармонического сигнала, приеме его в нескольких опорных радионавигационных точках с известными координатами, с объекта навигации дополнительно излучают второй высокочастотный гармонический сигнал, отличающийся по частоте от первого на заданную величину, в каждой из указанных опорных радионавигационных точек принимают этот сигнал, как и первый, формируют из принятых сигналов сигналы разностной частоты, передают сформированные сигналы в центральный приемный пункт, где измеряют разность фаз сигналов разностной частоты, полученных из разных опорных точек, а результаты этих измерений с учетом взаимного расположения центрального приемного пункта и опорных точек пересчитывают в координаты объекта навигации.
Сущность изобретения поясняется чертежом, на котором приведены:
- на фиг. 1 - взаимное положение объекта навигации и трех опорных радионавигационных точек;
- на фиг. 2 - структура формирователя сигнала разностной частоты.
Способ реализуется с помощью трех опорных радионавигационных точек с известными координатами и объекта навигации.
Функционирование способа поясняется фиг. 1, на которой показаны мобильный объект навигации (МО), находящийся в точке с неизвестными координатами X и Y, и опорные радионавигационные точки ОРТ1, ОРТ2 и ОРТ3, расположенные в точках с известными координатами X1 и Y1, X2 и Y2 и X3 и Y3 соответственно. Там же показаны расстояния D1, D2, D3 между объектом навигации и опорными радионавигационными точками, а также направление N на север.
С помощью передатчика объекта навигации излучают в направлении точек ОРТ1, ОРТ2 и ОРТ3 сумму двух гармонических высокочастотных сигналов с частотами f0 и f1:

Эти сигналы имеют амплитуды A и начальные случайные фазы φ0 и φ1.
Эти сигналы принимаются в точках ОРТ1, ОРТ2 и ОРТ3 на расстояниях D1, D2 и D3 соответственно от объекта навигации:



где C=3·108 м/с - скорость распространения радиоволн в атмосфере.
В каждой из опорных радионавигационных точек ОРТ1, ОРТ2 и ОРТ3 формируют сигналы разностной частоты.
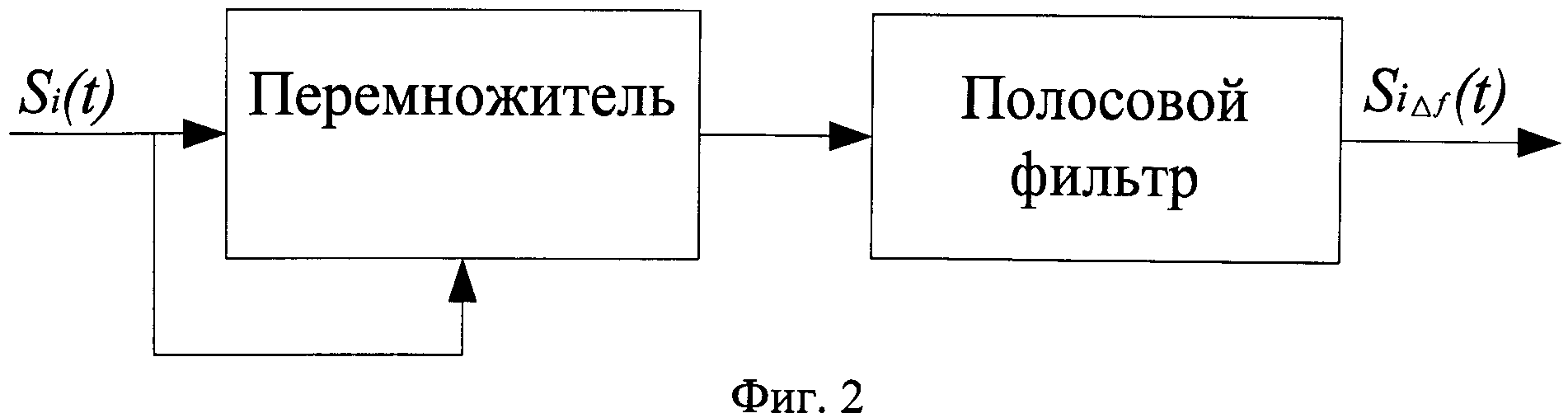
Структура формирователя сигналов разностной частоты приведена на фиг. 2. Он представляет собой последовательно включенные перемножитель и узкополосный низкочастотный полосовой фильтр.
В каждой из опорных радионавигационных точек сигнал  представляющий собой сумму двух высокочастотных гармонических сигналов с частотами f0 и f1, поступает на оба входа перемножителя.
представляющий собой сумму двух высокочастотных гармонических сигналов с частотами f0 и f1, поступает на оба входа перемножителя.
На выходе перемножителя формируется сумма постоянного напряжения и четырех гармонических сигналов с частотами 2f0, 2f1 и f0+f1 и разностной частотой fp=f0-f1 (частотой биений). Все эти гармонические сигналы, за исключением сигнала с частотой биений, подавляются фильтром.
Сигналы разностной частоты, формируемые в каждой из опорных радионавигационных точек имеют вид:



Нетрудно видеть, что сигналы, формируемые в каждой из опорных радионавигационных точек, различаются по фазам, которые определяются расстояниями D1, D2 и D3 соответственно. Эти сигналы передаются в центральный приемный пункт. В качестве такового может быть использована, например, одна из опорных радионавигационных точек. Примем для определенности, что территориально центральный приемный пункт находится в точке ОРТ2.
Таким образом, на центральном приемном пункте принимаются три следующих сигнала:
1) сигнал, поступивший из ОРТ1

Он отличается от сигнала  амплитудой и дополнительным фазовым сдвигом
амплитудой и дополнительным фазовым сдвигом  который обусловлен прохождением расстояния R21, разделяющего ОРТ1 и центральный приемный пункт (в рассматриваемом случае точку ОРТ2).
который обусловлен прохождением расстояния R21, разделяющего ОРТ1 и центральный приемный пункт (в рассматриваемом случае точку ОРТ2).
Этот сигнал можно представить в следующем виде:

где 
2) сигнал, непосредственно принятый в точке ОРТ2 (центральном приемном пункте)

В данном случае A22=А2, а дополнительный фазовый сдвиг отсутствует, поскольку расстояние между точкой ОРТ2 и центральным приемным пунктом равно нулю.
Этот сигнал также можно представить в виде

где 
3) сигнал, поступивший из ОРТ3

Этот сигнал также можно записать в виде:

где  Исправить в этой формуле индекс: было а надо
Исправить в этой формуле индекс: было а надо  !!!
!!!
Найдем разность фаз  сигналов
сигналов  и
и  и разность фаз
и разность фаз  сигналов
сигналов  и
и 


Из этих выражений следует, что в этих разностях отсутствуют случайные фазовые сдвиги φ0 и φ1.
Исключив из последних выражений для Δψ21 и Δψ23 известные фазовые сдвиги  и
и  получим окончательные выражения для расчета неизвестных координат объекта навигации разности Δφ21 фаз сигналов разностной частоты, сформированных второй и первой опорными точками, а также для расчета разности Δφ23 фаз сигналов разностной частоты, сформированных второй и третьей опорными точками:
получим окончательные выражения для расчета неизвестных координат объекта навигации разности Δφ21 фаз сигналов разностной частоты, сформированных второй и первой опорными точками, а также для расчета разности Δφ23 фаз сигналов разностной частоты, сформированных второй и третьей опорными точками:
Таким образом, параметр Δφ21 представляет собой разность фаз сигналов разностной частоты между второй и первой опорными точками, а параметр Δφ23 - между второй и третьей опорными точками. Указанные разности фаз однозначно соответствуют разностям дальностей D2-D1 и D2-D3 соответственно.
Это позволяет сделать вывод, что по результатам измерений параметров Δφ21 и Δφ23 могут быть рассчитаны параметры D1, D2 и D3 - расстояния между объектом навигации и опорными радионавигационными точками, а следовательно и координаты объекта навигации.
Ниже приведен алгоритм пересчета результатов измерения разности фаз сигналов разностной частоты в координаты объекта навигации. Этот алгоритм применим для локальных навигационных систем, когда допустимо пренебречь сферичностью Земли, а скорость распространения радиоволн в зоне действия навигационной системы можно считать постоянной.
Исходными данными для расчета являются:
- разность Δφ21 фаз сигналов разностной частоты для первой и второй радионавигационных точек;
- разность Δφ23 фаз сигналов разностной частоты для третьей и второй радионавигационных точек.
Кроме того, в расчете используются следующие константы:
- значение первой высокой частоты f0;
- значение второй высокой частоты f1;
- скорость распространения радиоволн в атмосфере C;
- расстояние между первой и второй опорными радионавигационными точками R21;
- расстояние между третьей и второй опорными радионавигационными точками R23.
Порядок расчета следующий.
1. Вычисляются разности расстояний от объекта навигации до опорных точек
Здесь D1, D2, D3 - расстояния от объекта навигации (МО) до первой ОРТ1, второй ОРТ2 и третьей ОРТ3 опорных радионавигационных точек в соответствии с фиг. 1.
2. Нормируются величины ΔD21 и ΔD23 по длинам базовых линий и вычисляется параметр γ:
3. Определяются постоянные параметры:

где α21 - угол между направлением на север и базовой линией R21;
α23 - угол между направлением на север и базовой линией R23.
4. Составляется уравнение для расчета угла β23 между базовой линией R23 и направлением на объект навигации:

Это уравнение решается относительно угла β23 каким-либо из численных итерационных методов, например методом деления отрезка пополам.
5. Вычисляются координаты объекта навигации в местной прямоугольной системе координат, начало которой находится в точке ОРТ2:


При необходимости координаты объекта навигации пересчитываются в исходную прямоугольную систему координат;


Таким образом, в предлагаемом способе исключена присущая способу-прототипу составляющая погрешности определения координат неподвижного передатчика второго гармонического высокочастотного сигнала. В предлагаемом способе этот передатчик не используется, а используется тот же передатчик, что и для первого гармонического сигнала. Следовательно, точность измерения координат в предлагаемом способе существенно выше, чем в прототипе.
Кроме того, в предлагаемом способе отсутствует необходимость в непрерывном излучении второго гармонического сигнала, поскольку он может излучаться лишь в промежутки времени, достаточные для измерения разности фаз сигналов разностной частоты. Это время не превышает долей миллисекунды. Малое время излучения сигнала затрудняет его обнаружение, а следовательно, и подавление потенциальным противником. Это значительно повышает помехоустойчивость аппаратуры, реализующей способ, по сравнению с прототипом.
Техническая реализация способа не вызывает затруднений. В качестве примера реализации рассмотрим реализацию предлагаемого способа для построения локальной навигационной системы для управления движением транспорта в местах повышенной опасности, где требуется высокоточное определение местоположения высокоскоростных движущихся объектов: на критических участках трасс их движения (например, при приближении к местам переключения стрелок на железнодорожных путях, вблизи крутых закрытых поворотов автомобильных трасс). Для реализации системы может быть выбран диапазон частот 1200-1400 МГц. Зона действия локальной навигационной может составлять несколько сотен метров.
Формирование двух гармонических сигналов (основного и дополнительного) на объекте навигации можно реализовать на основе двух синтезаторов частоты, синхронизируемых общим опорным генератором и сумматора. В качестве синтезаторов частоты можно применить, например, микросхемы типа ADF4360-5, позволяющие сформировать два высокостабильных гармонических сигнала с разносом частот от (0,1-100) МГц, в качестве опорного генератора - термостабилизарованный кварцевый генератор типа NT3225SA.
Для приема гармонических сигналов в опорных навигационных точках можно использовать интегральные СВЧ-усилители - микросхемы типа SPF5122Z, для нормировки принятых сигналов по амплитуде логарифмический усилитель AD8309, в качестве узла формирования сигнала разностной частоты - смеситель на транзисторе BFP620, нагрузкой которого является фильтр нижних частот с частотой среза, равной разностной частоте. Передачу сигналов разностной частоты из опорных навигационных точек в центральный приемный пункт можно реализовать либо по проводным каналам (при небольших расстояниях между опорными навигационными точками и центральным приемным пунктом - порядка 100 м), либо по радиоканалам с разделением их по частоте (при более значительных расстояниях между опорными навигационными точками и центральным приемным пунктом).
Выделение разности фаз сигналов разностной частоты в центральном приемном пункте реализуется на основе фазового детектора (например, на микросхеме SYPD-1 или подобной).
Аналоговые сигналы с выхода фазового детектора подаются через аналого-цифровые преобразователи на входные порты микропроцессора типа STM, в котором реализуется решение навигационной задачи по приведенному выше алгоритму.
Способ может найти применение для построения локальной навигационной системы для управления движением транспорта в местах повышенной опасности, где требуется высокоточное определение местоположения высокоскоростных движущихся объектов, на критических участках трасс их движения (например, при приближении к местам переключения стрелок на железнодорожных путях, вблизи крутых закрытых поворотов автомобильных трасс).
Способ определения местоположения объекта навигации, заключающийся в излучении объектом навигации высокочастотного гармонического сигнала, приеме его в нескольких опорных радионавигационных точках с известными координатами, отличающийся тем, что с объекта навигации дополнительно излучают второй высокочастотный гармонический сигнал, отличающийся по частоте от первого на заданную величину, в каждой из опорных радионавигационных точек принимают этот сигнал, наряду с первым, формируют из принятых сигналов сигналы разностной частоты, передают сформированные сигналы в центральный приемный пункт, где измеряют разность фаз сигналов разностной частоты, полученных из разных опорных точек, при этом второй высокочастотный сигнал излучают одновременно с первым и лишь в течение интервалов времени, достаточных для измерения разности фаз сигналов разностной частоты, а результаты измерений сигналов разностной частоты с учетом взаимного расположения центрального приемного пункта и опорных радионавигационных точек пересчитывают в координаты объекта навигации.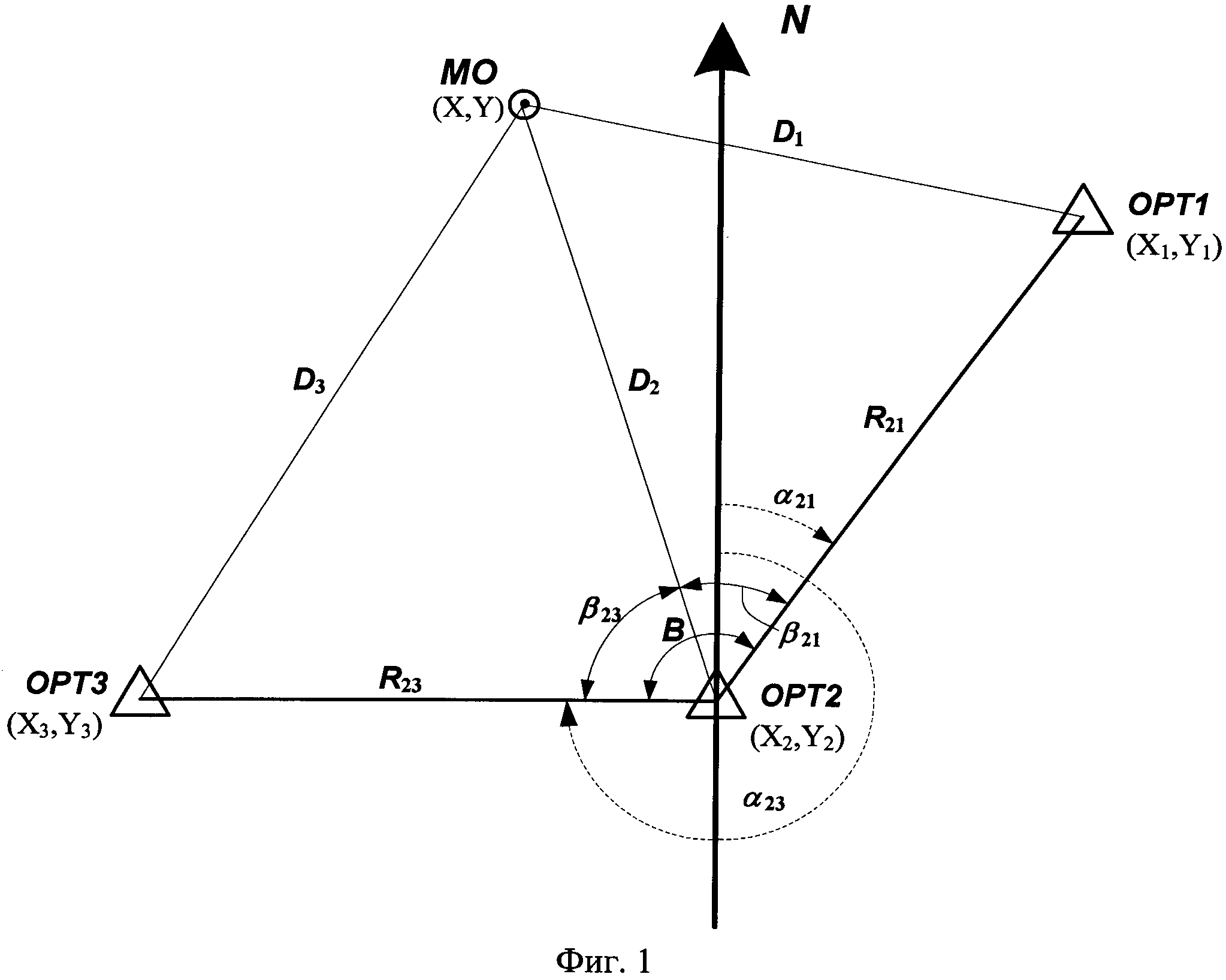
Способ защиты подводной лодки от широкополосной мины-торпеды
Способ контроля эксплуатации транспортных средств
Гидроакустическая навигационная система
Способ защиты подводной лодки от широкополосной мины-торпеды
Способ защиты подводной лодки от широкополосной мины-торпеды
Радиолокационный уровнемер
Рециркуляционный радиовысотомер
Импульсный радиовысотомер
Радиовысотомер с частотно-модулированным зондирующим сигналом
Способ радиоэлектронного подавления системы радиосвязи
Способ защиты подводной лодки от широкополосной мины-торпеды
Способ контроля эксплуатации транспортных средств
Гидроакустическая навигационная система
Способ защиты подводной лодки от широкополосной мины-торпеды
Способ защиты подводной лодки от широкополосной мины-торпеды
Радиолокационный уровнемер
Рециркуляционный радиовысотомер
Импульсный радиовысотомер
Радиовысотомер с частотно-модулированным зондирующим сигналом
Способ радиоэлектронного подавления системы радиосвязи

