Результат интеллектуальной деятельности: СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ОБЪЕКТА НАВИГАЦИИ
Вид РИД
Изобретение
Изобретение относится к радионавигации и может быть использовано в локальных навигационных системах и сетях для управления движением мобильных объектов в локальных зонах навигации.
Известна система для определения местоположения движущегося по дорогам транспортного средства (Road vehicle locating system) [Международная заявка РСТ N89/12835: G018 5/02, G08G 1/12 (UK, заявл. 17.06.88, опубл. 28.12.89)], содержащая приемник сигналов, размещенный на центральной станции, навигационное устройство, размещенное на движущемся объекте, и передающий блок типа радиотелефона, соединенный с навигационным устройством.
Приемник является существенным признаком и заявляемой системы.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является относительно низкая точность определения координат, так как координаты определяются навигационным устройством на основе данных радиомаяков, которые недостаточно точны.
Известна также защищенная патентом РФ №2013785 кл. G01S 13/00, 1994 система определения местоположения подвижных объектов, содержащая центральный пункт, не менее четырех приемных пунктов, М передатчиков, приемные и передающие антенны, блоки измерения задержки, приемники.
Передатчики и приемники являются существенными признаками и заявляемой системы.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является сложность реализации системы, что обусловлено большим объемом оборудования и необходимостью использования достаточно сложной системы единого времени.
Наиболее близкой по технической сущности к заявляемой (прототипом) является обращенная разностно-дальномерная радионавигационная система [Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А. Фазовый метод определения координат. - М.: Советское радио, 1979, с.97-100].
Эта система содержит четыре передатчика высокочастотных гармонических сигналов и не менее пяти приемников этих сигналов. Один из передатчиков установлен на подвижном объекте навигации, второй - на неподвижном объекте, остальные передатчики и приемники установлены в опорных навигационных точках с известными координатами.
Передатчики высокочастотных гармонических сигналов и их приемники являются существенными признаками и заявляемой системы.
Причиной, препятствующей обеспечению в системе-прототипе технического результата, обеспечиваемого изобретением, является то обстоятельство, что координаты неподвижного передатчика всегда определяются с определенной погрешностью, что приводит к снижению точности измерения координат объекта навигации.
Еще одной причиной, препятствующей достижению в системе-прототипе технического результата, обеспечиваемого изобретением, является необходимость непрерывного излучения сигнала неподвижным передатчиком. Это ухудшает условия электромагнитной совместимости аппаратуры системы. Возникает необходимость приема и передачи двух сигналов с близкими частотами, что ухудшает условия обеспечения информационной безопасности аппаратуры системы и облегчает возможность подавления ее работы потенциальным злоумышленником. Указанные обстоятельства существенно снижают помехозащищенность системы.
Технической задачей, на решение которой направлено изобретение, является повышение точности определения местоположения объекта навигации и помехозащищенности системы.
Для достижения указанного технического результата в известную систему, содержащую первый передатчик высокочастотного гармонического сигнала, установленный на объекте навигации, второй передатчик высокочастотного гармонического сигнала, отличающийся по частоте от первого, и три приемника этих сигналов, установленных в опорных радионавигационных точках с известными координатами, второй передатчик установлен, как и первый, на объекте навигации, при этом оба передатчика подключены к общей антенне и в систему дополнительно введены три измерительных канала (каналы формирования разностной частоты), каждый из которых содержит последовательно включенные балансный смеситель, узкополосный фильтр, усилитель-ограничитель и резонансный усилитель, три фазовых детектора, три аналого-цифровых преобразователя и вычислитель координат объекта навигации, выходы первого, второго и третьего приемников соединены с обоими входами балансного смесителя соответственно первого, второго и третьего измерительных каналов, первый вход первого фазового детектора соединен со вторым входом третьего фазового детектора и выходом первого измерительного канала, второй вход первого фазового детектора соединен с первым входом второго фазового детектора и выходом второго измерительного канала, а первый вход третьего фазового детектора соединен со вторым входом второго фазового детектора и выходом третьего измерительного канала, а каждый из аналого-цифровых преобразователей включен между выходом соответствующего фазового детектора и соответствующим входом вычислителя координат объекта навигации.
Сущность изобретения поясняется чертежом, на котором приведены:
на фиг. 1 - структурная схема предлагаемой системы;
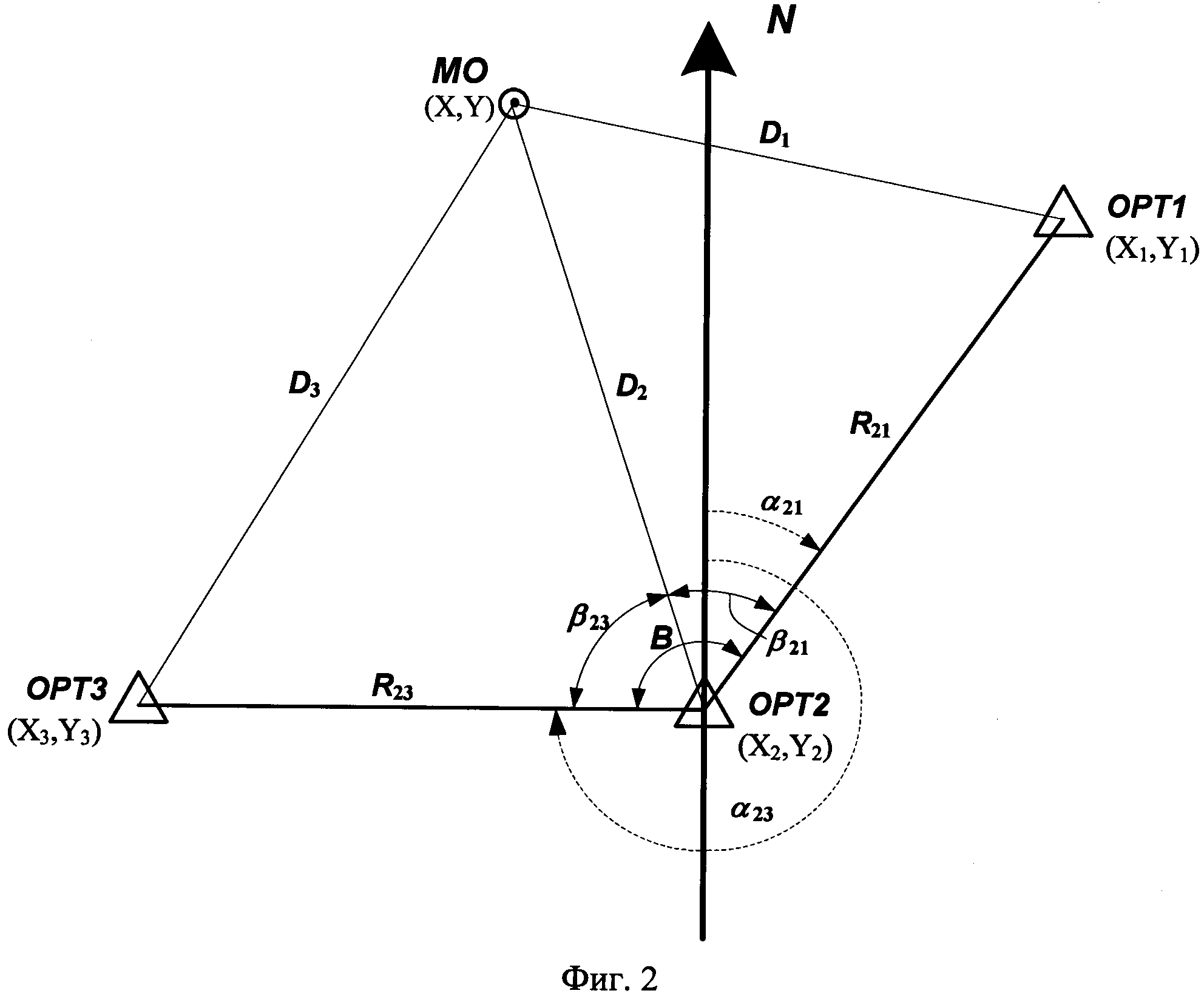
на фиг. 2 - взаимное расположение объекта навигации и опорных радионавигационных точек с приемниками.
Система для измерения координат объекта навигации содержит два расположенных на объекте навигации передатчика 1.1 и 1.2 высокочастотных гармонических сигналов с общей передающей антенной 2, три приемника 3.1, 3.2 и 3.3 этих сигналов с приемными антеннами 4.1, 4.2 и 4.3, установленных в опорных радионавигационных точках с известными координатами, три измерительных канала (каналы формирования разностной частоты), три фазовых детектора 5.1, 5.2 и 5.3, три аналого-цифровых преобразователя 6.1, 6.2 и 6.3 и вычислитель 7 координат объекта навигации.
Каждый из измерительных каналов содержит последовательно включенные балансный смеситель 8.i  , узкополосный фильтр 9.i
, узкополосный фильтр 9.i  , усилитель-ограничитель 10.i
, усилитель-ограничитель 10.i  и резонансный усилитель 11.i
и резонансный усилитель 11.i  . Выходы каждого из приемников 3.i соединены с обоими входами соответствующего балансного смесителя 8.i. Первый вход фазового детектора 5.1 соединен со вторым входом фазового детектора 5.3 и выходом первого измерительного канала, второй вход фазового детектора 5.1 соединен с первым входом фазового детектора 5.2 и выходом второго измерительного канала, а первый вход фазового детектора 5.3 соединен со вторым входом фазового детектора 5.2 и выходом третьего измерительного канала. Каждый из аналого-цифровых преобразователей 6.i включен между выходом соответствующего фазового детектора 5.i и соответствующим входом вычислителя 7.
. Выходы каждого из приемников 3.i соединены с обоими входами соответствующего балансного смесителя 8.i. Первый вход фазового детектора 5.1 соединен со вторым входом фазового детектора 5.3 и выходом первого измерительного канала, второй вход фазового детектора 5.1 соединен с первым входом фазового детектора 5.2 и выходом второго измерительного канала, а первый вход фазового детектора 5.3 соединен со вторым входом фазового детектора 5.2 и выходом третьего измерительного канала. Каждый из аналого-цифровых преобразователей 6.i включен между выходом соответствующего фазового детектора 5.i и соответствующим входом вычислителя 7.
Функционирование системы поясняется фиг. 2, на которой показаны мобильный объект навигации (МО) с передатчиками 1.1 и 1.2 и общей передающей антенной 2, опорные радионавигационные точки ОРТ1, ОРТ2 и ОРТ3 с приемниками 3.1, 3.2 и 3.3 и приемными антеннами 4.1, 4.2 и 4.3 расположены в точках с известными координатами X1 и Y1, Х2 и Y2 и Х3 и Y3 соответственно. Там же показаны расстояния D1, D2 и D3 между объектом навигации и опорными радионавигационными точками, а также направление N на север.
Передатчики 1.1 и 1.2 генерируют высокочастотные гармонические сигналы с частотами ω0 и ω1 соответственно. С помощью общей антенны 2 в направлении точек ОРТ1, ОРТ2 и ОРТ3 излучается сумма этих двух сигналов:

Эти сигналы имеют одинаковые амплитуды А и случайные начальные фазы φ0 и φ1.
С помощью приемников 3.1, 3.2 и 3.3 с антеннами 4.1, 4.2 и 4.3 эти сигналы принимаются в точках ОРТ1, ОРТ2 и ОРТ3, находящихся на расстояниях D1, D2 и D3 от объекта навигации соответственно:



где С=3·108 м/с - скорость распространения радиоволн в атмосфере.
Принятые сигналы поступают на входы измерительных каналов (каналов формирования разностных частот).
Каждый из измерительных каналов представляет собой совокупность последовательно включенных балансного смесителя 8.i  , узкополосного фильтра 9.i
, узкополосного фильтра 9.i  и усилителя-ограничителя 10.i
и усилителя-ограничителя 10.i  .
.
Сигнал Si(t) поступает на оба входа балансного смесителя 8.i  . В нем сигнал, по сути, возводится в квадрат, и на выходе смесителя 8.i
. В нем сигнал, по сути, возводится в квадрат, и на выходе смесителя 8.i  получим:
получим:
Таким образом, на выходе балансного смесителя формируются сигнал нулевой частоты (постоянная составляющая  ), три высокочастотных гармонических сигнала с частотами, равными 2ω0, 2ω1 и (ω0+ω1), а также гармонический сигнал с разностной частотой ωp=(ω0-ω1).
), три высокочастотных гармонических сигнала с частотами, равными 2ω0, 2ω1 и (ω0+ω1), а также гармонический сигнал с разностной частотой ωp=(ω0-ω1).
Узкополосный фильтр 9.i  настроен на разностную частоту ωp. Постоянная составляющая
настроен на разностную частоту ωp. Постоянная составляющая  , как и высокочастотные составляющие с частотами 2ω0, 2ω1 и (ω0+ω1), подавляются этим фильтром, а сигнал разностной частоты проходит через этот фильтр, усилитель-ограничитель 10.i
, как и высокочастотные составляющие с частотами 2ω0, 2ω1 и (ω0+ω1), подавляются этим фильтром, а сигнал разностной частоты проходит через этот фильтр, усилитель-ограничитель 10.i  и резонансный усилитель 11.i
и резонансный усилитель 11.i  проходит на выход измерительного канала. Усилитель-ограничитель 10.i
проходит на выход измерительного канала. Усилитель-ограничитель 10.i  и резонансный усилитель 11.i
и резонансный усилитель 11.i  осуществляют нормирование сигналов разностной частоты, сохраняя их гармоническими и устраняя в то же время зависимость их амплитуды от расстояния между мобильным объектом и радионавигационными точками.
осуществляют нормирование сигналов разностной частоты, сохраняя их гармоническими и устраняя в то же время зависимость их амплитуды от расстояния между мобильным объектом и радионавигационными точками.
Таким образом, на выходах измерительных каналов в каждой из радионавигационных точек ОРТ1, ОРТ2 и ОРТ3 сформируются гармонические сигналы разностной частоты ωp с постоянной амплитудой:



Эти сигналы сдвинуты по фазе один относительно другого на величины  ,
,  и
и  , которые определяются расстояниями D1, D2 и D3 соответственно.
, которые определяются расстояниями D1, D2 и D3 соответственно.
Сигналы разностных частот по проводам передаются в центральный приемный пункт, где установлены фазовые детекторы 5.1, 5.2, 5.3, аналого-цифровые преобразователи 6.1, 6.2, 6.3 и вычислитель 7 координат объекта навигации.
В качестве центрального приемного пункта в принципе может быть использована, например, одна из опорных радионавигационных точек. Примем для определенности, что территориально центральный приемный пункт находится в точке ОРТ2.
В этих условиях на центральном приемном пункте принимаются три следующих сигнала:
1) сигнал с выхода первого измерительного канала

Он отличается от сигнала  амплитудой и дополнительным фазовым сдвигом
амплитудой и дополнительным фазовым сдвигом  , который обусловлен прохождением расстояния R21, разделяющего ОРТ1 и центральный приемный пункт (в данном случае точку ОРТ2).
, который обусловлен прохождением расстояния R21, разделяющего ОРТ1 и центральный приемный пункт (в данном случае точку ОРТ2).
Этот сигнал можно представить в следующем виде:
 ,
,
где  ;
;
2) сигнал с выхода второго измерительного канала, непосредственно сформированный в точке ОРТ2 (центральном приемном пункте)
 .
.
В данном случае дополнительный фазовый сдвиг отсутствует, поскольку расстояние между точкой ОРТ2 и центральным приемным пунктом равно нулю.
Этот сигнал также можно представить в виде
 ,
,
где  ;
;
3) сигнал с выхода третьего измерительного канала:
 .
.
Этот сигнал по аналогии также можно записать в виде:
 ,
,
где  .
.
Найдем разность фаз Δψ21=ψ22-ψ21 сигналов S22(t) и S21(t) и разность фаз Δψ23=ψ22-ψ23 сигналов S22(t) и S23(t):
 ,
,
 .
.
Из этих выражений следует, что в этих разностях отсутствуют случайные фазовые сдвиги φ0 и φ1.
Исключив из последних выражений для Δψ21 и Δψ23 известные фазовые сдвиги  и
и  , получим окончательные выражения для расчета неизвестных координат объекта навигации - разности Δφ21 фаз сигналов разностной частоты, сформированных вторым и первым измерительными каналами, а также для расчета разности Δφ23 сигналов разностной частоты, сформированных вторым и третьим измерительными каналами:
, получим окончательные выражения для расчета неизвестных координат объекта навигации - разности Δφ21 фаз сигналов разностной частоты, сформированных вторым и первым измерительными каналами, а также для расчета разности Δφ23 сигналов разностной частоты, сформированных вторым и третьим измерительными каналами:
 ,
,
 .
.
Таким образом, величина Δφ21 представляет собой разность фаз сигналов разностной частоты между второй и первой опорными точками, а величина Δφ23 - между второй и третьей опорными точками. Указанные разности фаз однозначно соответствуют разностям дальностей D2-D1 и D2-D3 соответственно.
Это позволяет сделать вывод, что по результатам измерений параметров Δφ21 и Δφ23 могут быть рассчитаны величины D1, D2 и D3 - расстояния между объектом навигации и опорными радионавигационными точками, а следовательно, и координаты объекта навигации.
Измерение разностей фаз сигналов на выходах измерительных каналов в центральном приемном пункте осуществляется с помощью фазовых детекторов 5.1, 5.2 и 5.3. Результаты измерений с помощью аналого-цифровых преобразователей 6.1, 6.2 и 6.3 преобразуются в цифровую форму и передаются в вычислитель 7 для пересчета результатов измерения в координаты объекта навигации.
Ниже приведен алгоритм пересчета результатов измерения разности фаз сигналов разностной частоты в координаты объекта навигации.
Исходными данными для расчета являются:
- разность Δφ21 фаз сигналов разностной частоты для первой и второй радионавигационных точек;
- разность Δφ23 фаз сигналов разностной частоты для третьей и второй радионавигационных точек.
Кроме того, в расчете используются следующие константы:
- значение первой высокой частоты ω0;
- значение второй высокой частоты ω1;
- скорость распространения радиоволн в атмосфере С;
- расстояние между первой и второй опорными радионавигационными точками R21;
- расстояние между третьей и второй опорными радионавигационными точками R23.
Порядок расчета следующий.
1) Вычисляются разности расстояний от объекта навигации до опорных точек
 ;
;
 .
.
Здесь D1, D2, D3 - расстояния от объекта навигации (МО) до ОРТ1, ОРТ2 и ОРТ3 - опорных радионавигационных точек в соответствии с фиг. 2.
2) Нормируются величины ΔD21 и ΔD23 по длинам базовых линий и вычисляется параметр γ:

3) Определяются постоянные параметры:
а=α21-α23; b=γ·Δd23-Δd21,
где α21 - угол между направлением на север и базовой линией R21;
α23 - угол между направлением на север и базовой линией R23.
4) Составляется уравнение для расчета угла β23 между базовой линией R23 и направлением на объект навигации:
Cos(а-β23)-γ·Cosβ23=b
Это уравнение решается относительно угла β23 каким-либо из итерационных методов, например методом деления отрезка пополам.
5) Вычисляются координаты объекта навигации в местной прямоугольной системе координат, начало которой находится в точке ОРТ2:


При необходимости координаты объекта навигации пересчитываются в исходную прямоугольную систему координат:


Таким образом, в предлагаемой системе исключена присущая системе-прототипу составляющая погрешности, обусловленная неточностью определения координат неподвижного передатчика второго гармонического высокочастотного сигнала. В предлагаемой системе оба передатчика размещены на мобильном объекте, и для излучения сигналов используется одна и та же антенна, вследствие чего устраняется причина возникновения рассматриваемой дополнительной составляющей погрешности при измерении координат мобильного объекта. Следовательно, точность измерения координат в предлагаемой системе выше, чем в прототипе.
Кроме того, в предлагаемой системе отсутствует необходимость в непрерывном излучении второго гармонического сигнала, поскольку он может излучаться лишь в промежутки времени, достаточные для измерения разности фаз сигналов разностной частоты. Это время не превышает долей миллисекунды. Малое время излучения сигнала затрудняет его обнаружение, а следовательно, и подавление потенциальным злоумышленником. Это значительно повышает помехоустойчивость заявляемой системы по сравнению с прототипом.
Техническая реализация системы не вызывает затруднений.
Для реализации высокочастотных сигналов может быть выбран диапазон 1200-1400 МГц. В этом диапазоне легко обеспечить выполнение условия узкополосности при передаче и приеме двух сигналов и одновременно избежать больших потерь энергии радиосигналов в атмосфере.
В качестве передатчиков 1.1 и 1.2 сигнала могут быть использованы интегральные СВЧ-усилители типа 8РР51222, к входам которых подключены синтезаторы частоты типа ADF4360-5.
В качестве антенны 2 может использовать полуволновый вибратор, к входу которого подключен микрополосковый сумматор с двумя входами.
В качестве приемников 3.1, 3.2 и 3.3 сигнала можно использовать СВЧ-усилители типа SPF5122Z.
В качестве приемных антенн 4.1, 4.2 и 4.3 используются полуволновые вибраторы.
В качестве фазовых детекторов 5.1, 5.2 и 5.3 микросхема типа SYPD-1.
В качестве аналого-цифровых преобразователей 6.1, 6.2 и 6.3 и качестве вычислителя 7 микросхема STM32F407, содержащая два встроенных 12-ти разрядных аналого-цифровых преобразователя и 16-ти разрядный микропроцессор.
Балансные смесители 8.i могут быть реализованы на транзисторах BFP620.
Узкополосный фильтр 9.i может быть реализован на микрополосковых линиях.
В качестве усилителя-ограничителя 10.i можно использовать логарифмический усилитель AD8309.
В качестве резонансного усилителя можно использовать активный полосовой фильтр второго порядка на операционном усилителе AD797ANZ.
Система для измерения координат объекта навигации, содержащая первый передатчик высокочастотного гармонического сигнала, установленный на объекте навигации, второй передатчик высокочастотного гармонического сигнала, отличающийся по частоте от первого, и три приёмника этих сигналов, установленных в опорных радионавигационных точках с известными координатами, отличающаяся тем, что второй передатчик установлен, как и первый, на объекте навигации, при этом оба передатчика подключены к общей антенне, в систему введены три измерительных канала (каналы формирования разностной частоты), каждый из которых содержит последовательно включённые балансный смеситель, узкополосный фильтр, усилитель-ограничитель и резонансный усилитель, три фазовых детектора, три аналого-цифровых преобразователя и вычислитель координат объекта навигации, выходы первого, второго и третьего приёмников соединены с обоими входами балансного смесителя соответственно первого, второго и третьего измерительных каналов, первый вход первого фазового детектора соединён со вторым входом третьего фазового детектора и выходом первого измерительного канала, второй вход первого фазового детектора соединён с первым входом второго фазового детектора и выходом второго измерительного канала, а первый вход третьего фазового детектора соединён со вторым входом второго фазового детектора и выходом третьего измерительного канала, а каждый из аналого-цифровых преобразователей включён между выходом соответствующего фазового детектора и соответствующим входом вычислителя координат объекта навигации.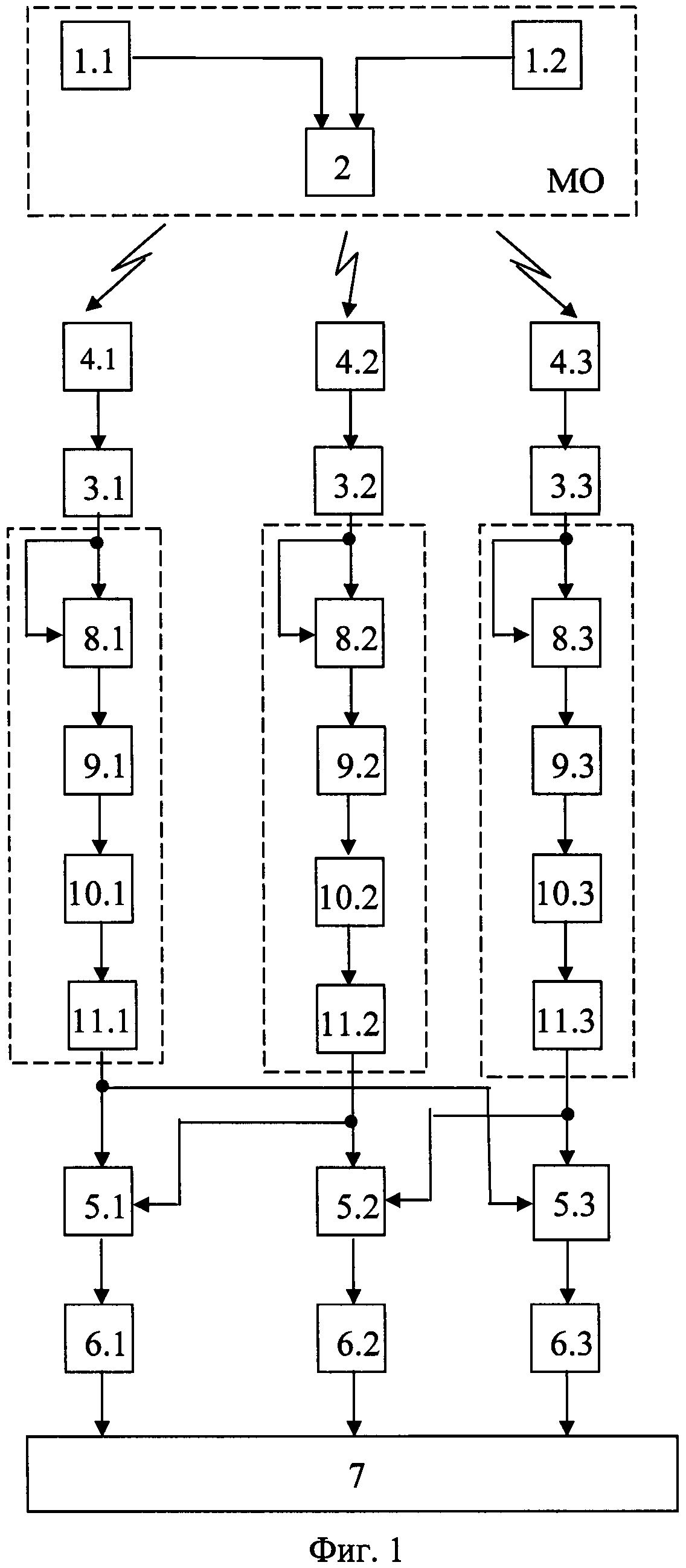
Способ защиты подводной лодки от широкополосной мины-торпеды
Способ контроля эксплуатации транспортных средств
Гидроакустическая навигационная система
Способ защиты подводной лодки от широкополосной мины-торпеды
Способ защиты подводной лодки от широкополосной мины-торпеды
Радиолокационный уровнемер
Рециркуляционный радиовысотомер
Импульсный радиовысотомер
Радиовысотомер с частотно-модулированным зондирующим сигналом
Способ радиоэлектронного подавления системы радиосвязи
Способ защиты подводной лодки от широкополосной мины-торпеды
Способ контроля эксплуатации транспортных средств
Гидроакустическая навигационная система
Способ защиты подводной лодки от широкополосной мины-торпеды
Способ защиты подводной лодки от широкополосной мины-торпеды
Радиолокационный уровнемер
Рециркуляционный радиовысотомер
Импульсный радиовысотомер
Радиовысотомер с частотно-модулированным зондирующим сигналом
Способ радиоэлектронного подавления системы радиосвязи

