Результат интеллектуальной деятельности: СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ
Вид РИД
Изобретение
Изобретение относится к способам наблюдения за подводной средой (освещения подводной обстановки) и поиска подводных объектов автономными необитаемыми подводными аппаратами (НПА), удаленными от надводного корабля (НК) или берегового поста (БП) с использованием радиогидроакустических буев реактивных (РГБР).
Известны способы поиска подводных объектов поисковыми (многоцелевыми) НПА, управляемыми автономно или дистанционно с надводных кораблей (ПК) [1], [2], [3].
При дистанционном управлении НПА с НК для поиска подводных объектов (мин) [1] обычно используют кабельную линию связи, которая ограничивает дальность действия НПА. Автономное управление НПА позволяет существенно увеличить район его действий [2]. Однако увеличение дальности действия НПА оказывает существенное влияние на точность его движения по заданной траектории. В современных системах управления НПА применяют инерциальные навигационные системы (ИНС) [4]. Точность позиционирования места НПА при использовании ИНС снижается пропорционально времени его движения и может достигать сотен метров при многочасовой работе. Для повышения точности географического позиционирования НПА совместно с ИНС применяют различные способы, в том числе используют космические (КНС), радионавигационные (РНС), гидроакустические навигационные системы или устанавливают в районе действий НПА специальные маяки [5, с. 75].
Таким образом, поиск подводных объектов автономными поисковыми (многоцелевыми) НПА при использовании только ИНС сопровождается постепенным снижением точности удержания ими заданной (программной) траектории, а значит, и точности информации по обнаруженным ими подводным объектам.
Известно устройство - радиогидроакустический буй (РГБ), содержащий корпус, батарею, парашютную систему, передатчик, приемник с гидрофонами, запоминающее устройство, кабель-трос, антенну, механизм автоотцепа, блок управления, часовой механизм [6]. РГБ состоят на вооружении Военно-морских сил многих государств уже долгое время и применяются авиацией для наблюдения за подводной средой [7].
Известно устройство - радиогидроакустический буй реактивный (РГБР), включающий корпус, батарею, парашютную систему, передатчик, приемник с гидрофонами, запоминающее устройство, кабель-трос, антенну, механизм автоотцепа, блок управления, часовой механизм, ракетный двигатель, стабилизатор, механизм отделения, устройство ввода данных, датчик приводнения, поплавок, газогенератор [8]. РГБР предназначен к применению с надводных кораблей ВМФ путем выстреливания из пусковой установки (ПУ), в качестве которой может использоваться ПУ реактивной системы залпового огня (РСЗО). Решение задачи стрельбы предусматривается вычислительным устройством и приборами управления стрельбой (ПУС).
Известен способ применения РГБР, при котором определяют координаты опорной точки (точки потери контакта с подводным объектом), относительно которой требуется расположить необходимое число РГБР (по окружности или в секторе предполагаемых курсов движения подводного объекта), посредством вычислительного устройства решают задачи по определению требуемого числа РГБР в залпе и координат точек их приводнения, заряжают ПУ необходимым числом РГБР, посредством ПУС решают задачи по наведению ПУ для выполнения стрельбы, наводят ПУ для стрельбы РГБР в расчетные точки в соответствии с очередностью пуска, после чего выстреливают РГБР из ПУ, включают РГБР после их приводнения и принимают от них сигналы о подводной обстановке [9].
Данный способ целесообразно использовать для поиска подводной цели, когда известно хотя бы приблизительное ее местонахождение или маршрут движения, так как иначе выставленные буи будут использованы безрезультатно.
Целью изобретения является разработка способа освещения подводной обстановки и поиска подводных объектов автономным НПА, удаленным от НК или БП, позволяющего контролировать точность местоположения НПА, осуществлять непрерывное наблюдение за обнаруженными НПА подводными объектами, а при необходимости и дистанционно управлять его работой.
Данная цель достигается благодаря тому, что предлагается способ освещения подводной обстановки, при котором осуществляют поиск подводных объектов автономным НПА, оснащенным неконтактной системой обнаружения (НСО) подводных объектов, при его движении по заданному маршруту, установленному в его бортовую ИНС перед пуском, обнаруживают подводный объект, сообщают об обнаружении подводного объекта на НК или БП, классифицируют обнаруженный подводный объект, отличающийся тем, что рассчитывают время, через которое точность удержания НПА заданного маршрута движения достигнет минимально допустимого значения, определяют упрежденную (расчетную) точку расположения НПА через это время, по истечении рассчитанного времени на НК или БП посредством вычислительного устройства рассчитывают данные для выполнения стрельбы одним РГБР при работе НСО НПА в активном режиме или двумя РГБР при работе НСО НПА в пассивном режиме в упрежденную (расчетную) точку расположения НПА, наводят пусковую установку и выполняют стрельбу одним или двумя РГБР, после приводнения РГБР включают его (их) НСО подводных объектов, уточняют географическое положение НПА по известным координатам НК (БП) и РГБР путем регистрации НСО НПА пеленга и дистанции на приводнившийся РГБР при работе НСО НПА в активном режиме или путем регистрации пеленгов на приводнившиеся РГБР при работе НСО НПА в пассивном режиме и передают эти данные на НК (БП) по действующей линии связи между НПА, РГБР и НК (БП), передают на НПА по действующей линии связи необходимые команды дистанционного управления.
В вариантном исполнении предлагается способ освещения подводной обстановки, отличающийся от рассмотренного выше тем, что в случае, когда НПА не в состоянии преследовать обнаруженный им подводный объект и поддерживать с ним контакт, на НК (БП) посредством вычислительного устройства рассчитывают параметры заградительного (перехватывающего) барьера РГБР и данные стрельбы для них, с учетом действительной скорости подводного объекта, наводят пусковую установку и выполняют стрельбу РГБР в расчетные точки барьера, после приводнения РГБР включают их НСО, обнаруживают подводный объект, передают информацию о нем на НК (БП) по действующей линии связи, уточняют координаты и характер движения подводного объекта.
Техническое осуществление способа освещения подводной обстановки поясняется чертежами, на которых:
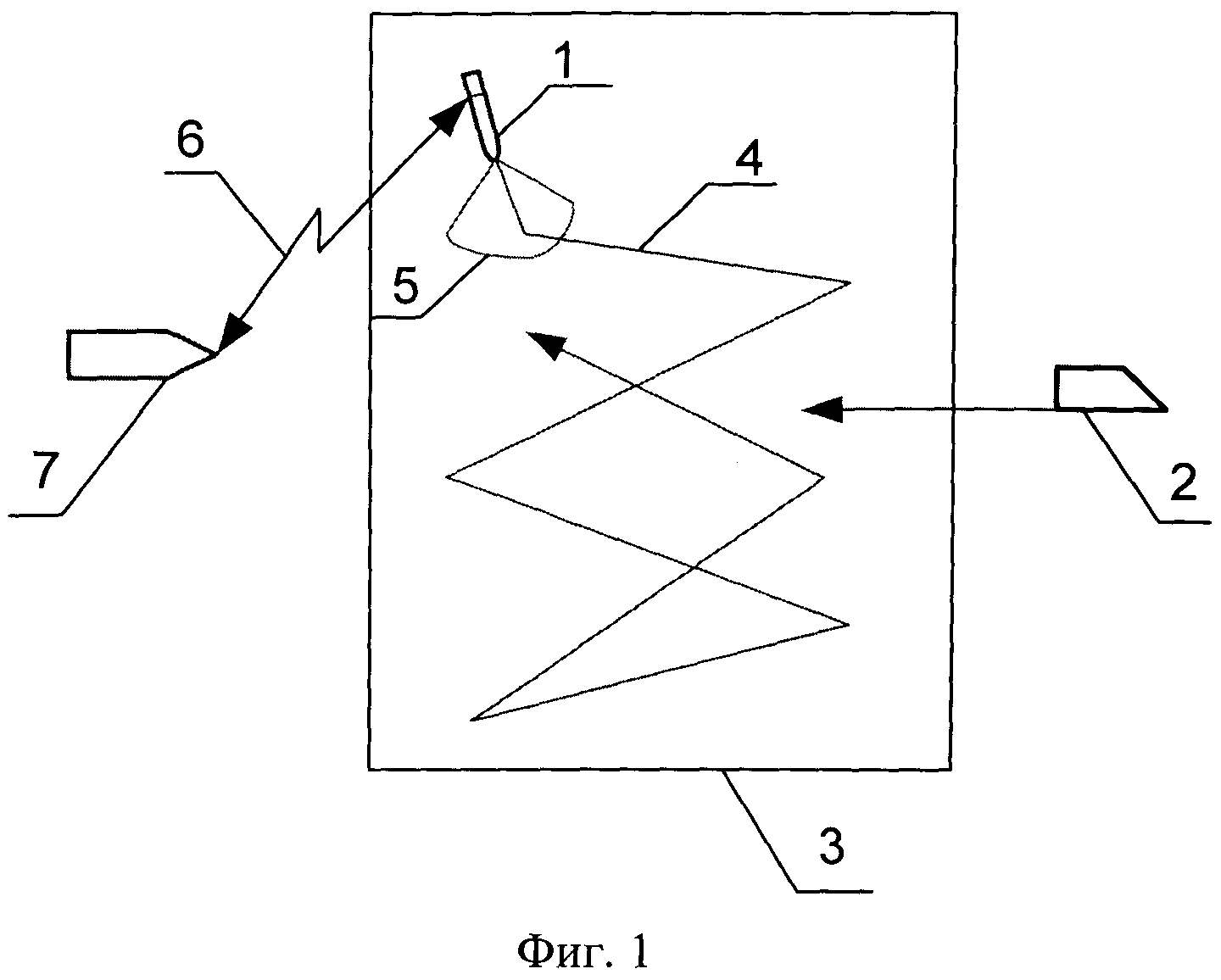
Фиг. 1 - схема поиска подводной цели НПА;
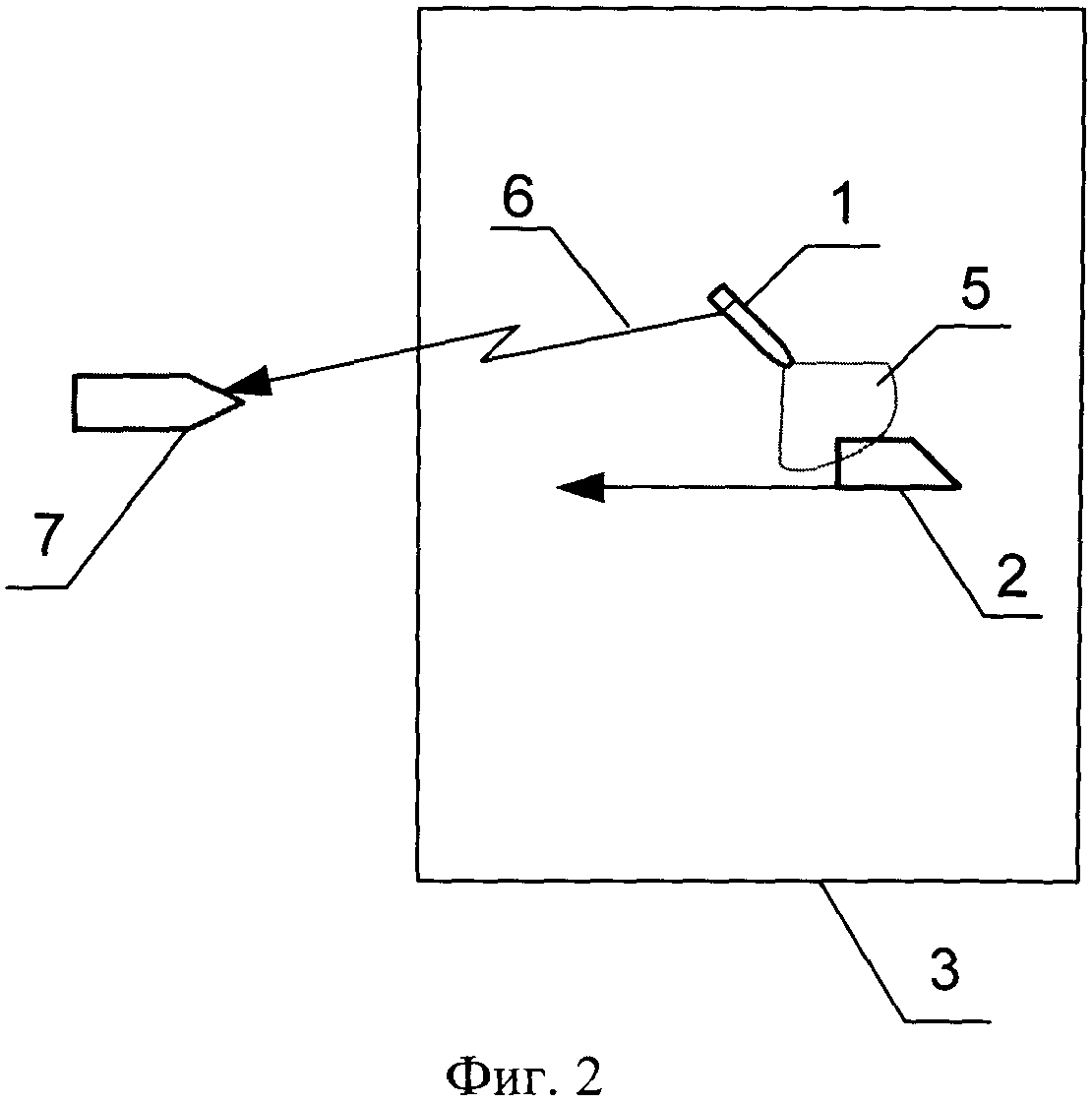
Фиг. 2 - схема действия НПА при обнаружении цели;
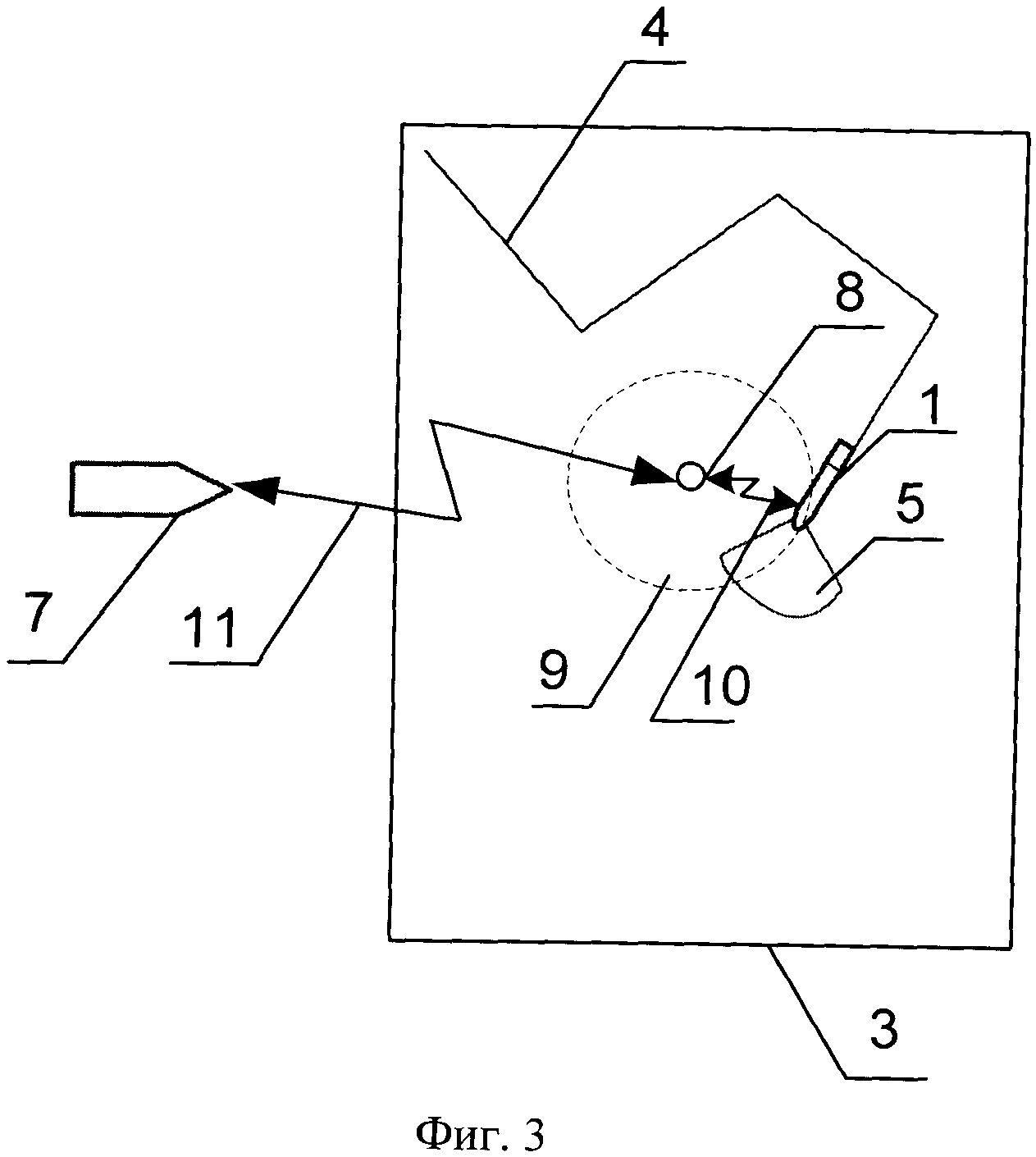
Фиг. 3 - схема уточнения места НПА (цели) с применением РГБР;
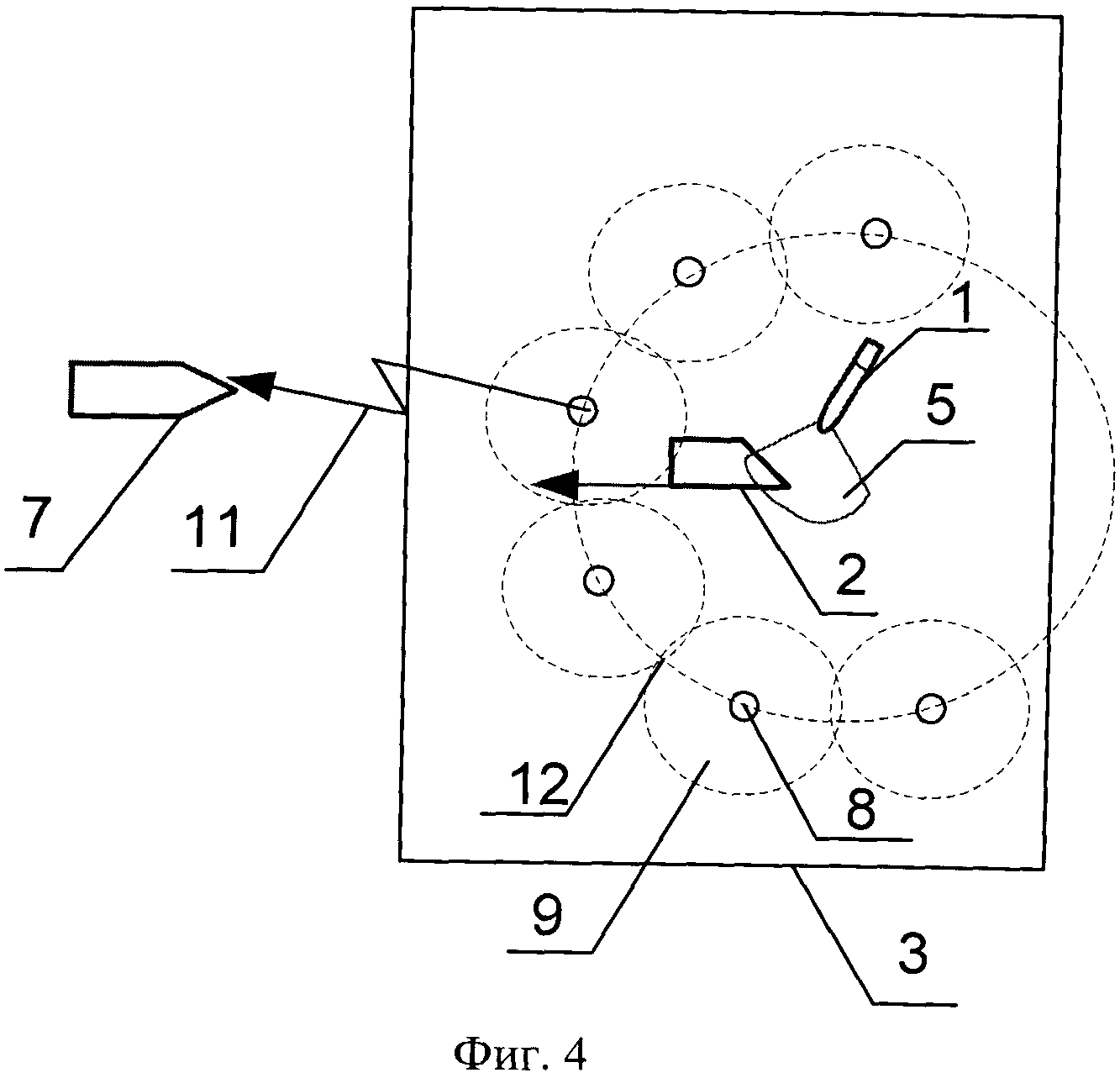
Фиг. 4 - схема постановки барьера РГБР;
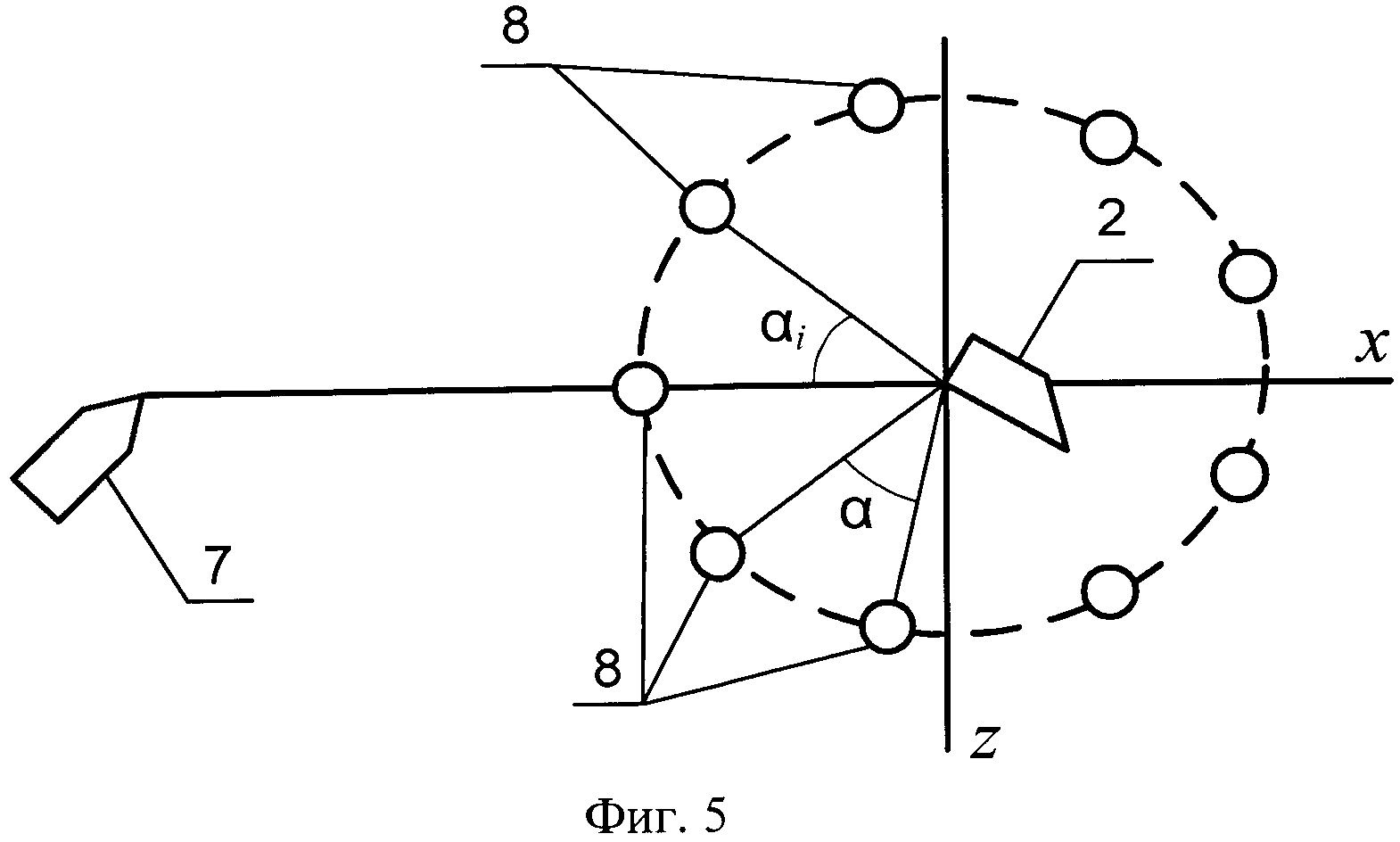
Фиг. 5 - схема кругового барьера РГБР;
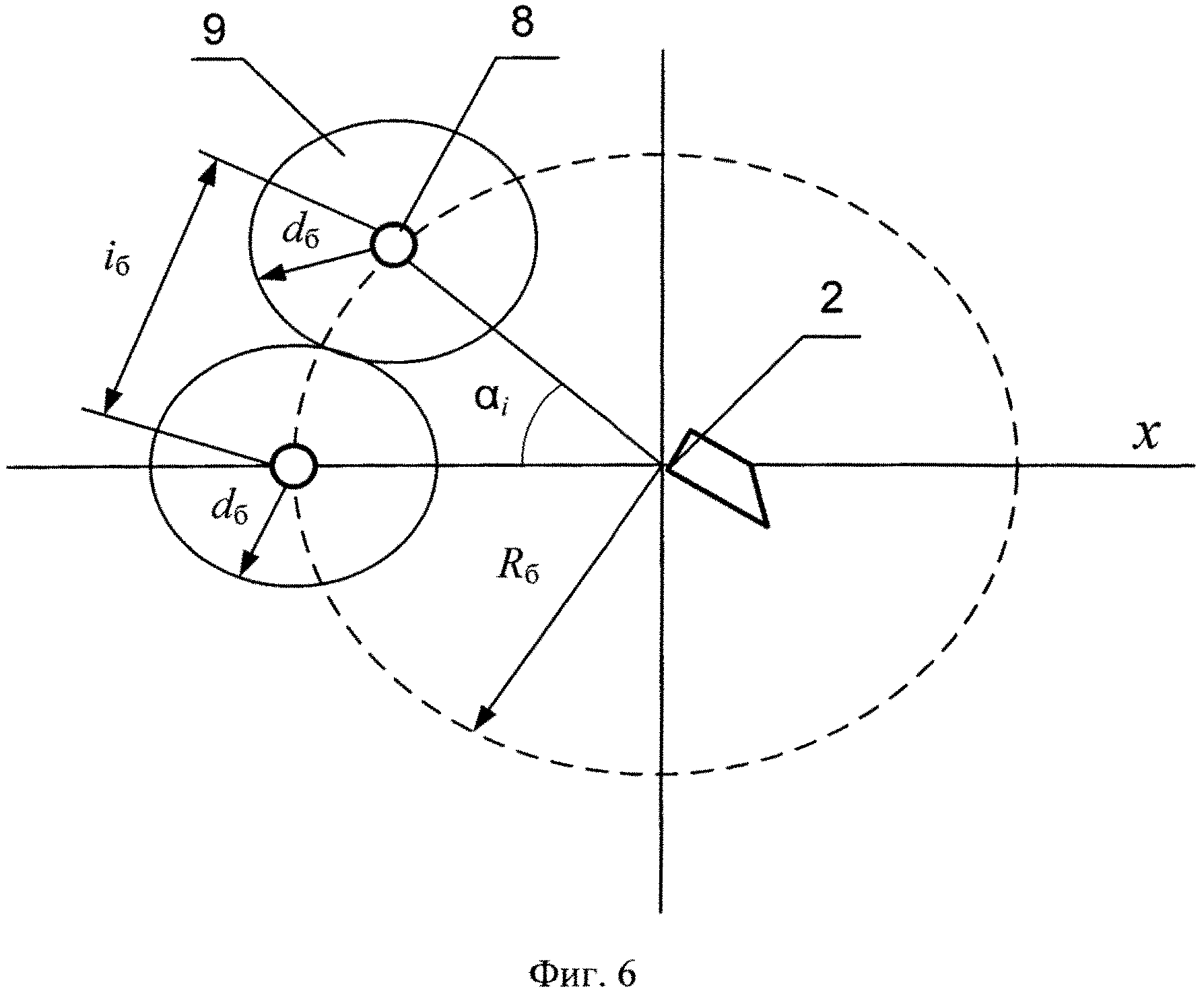
Фиг. 6 - интервал между соседними буями барьера;
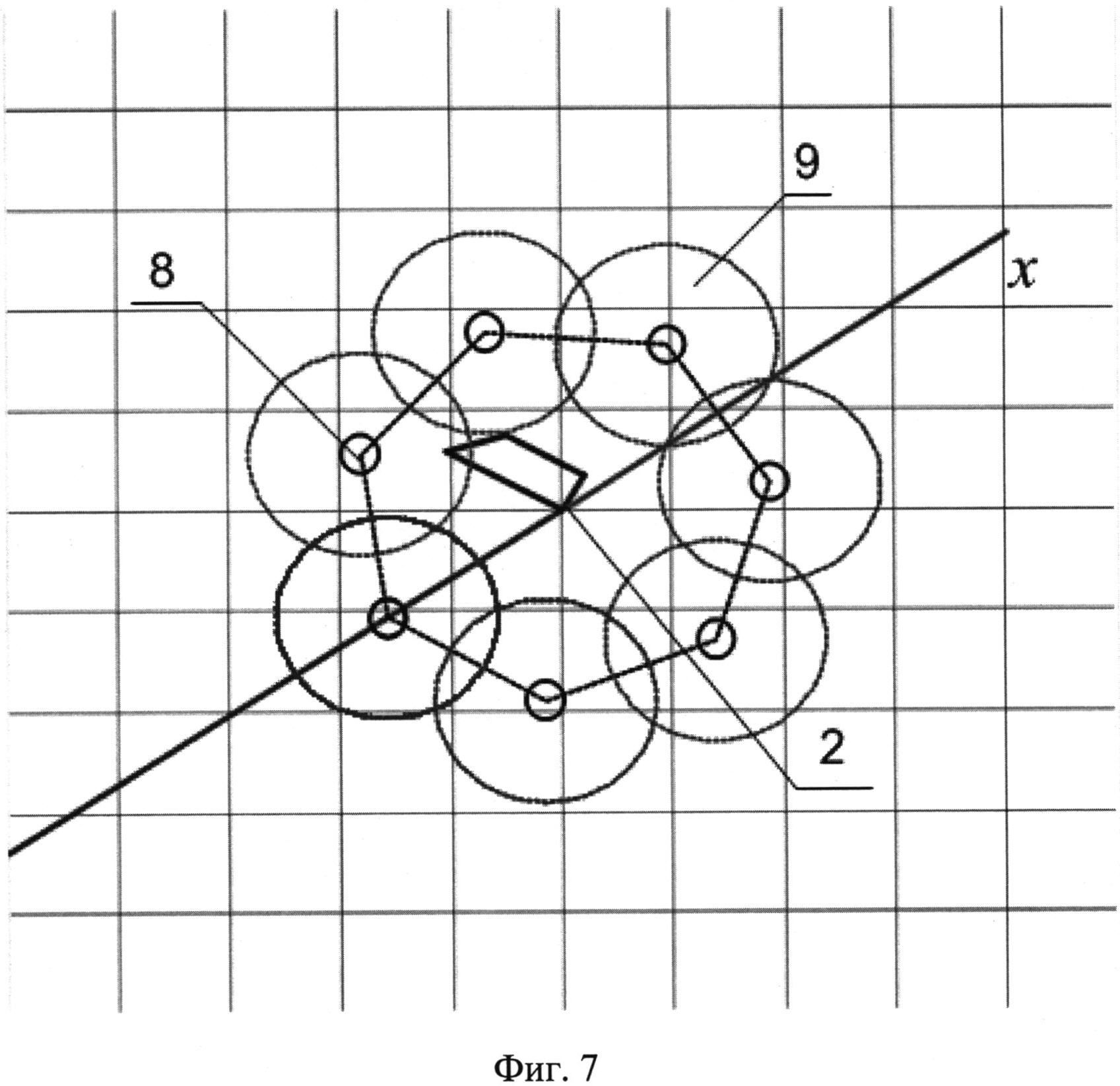
Фиг. 7 - пример расчетного кругового барьера РГБР;
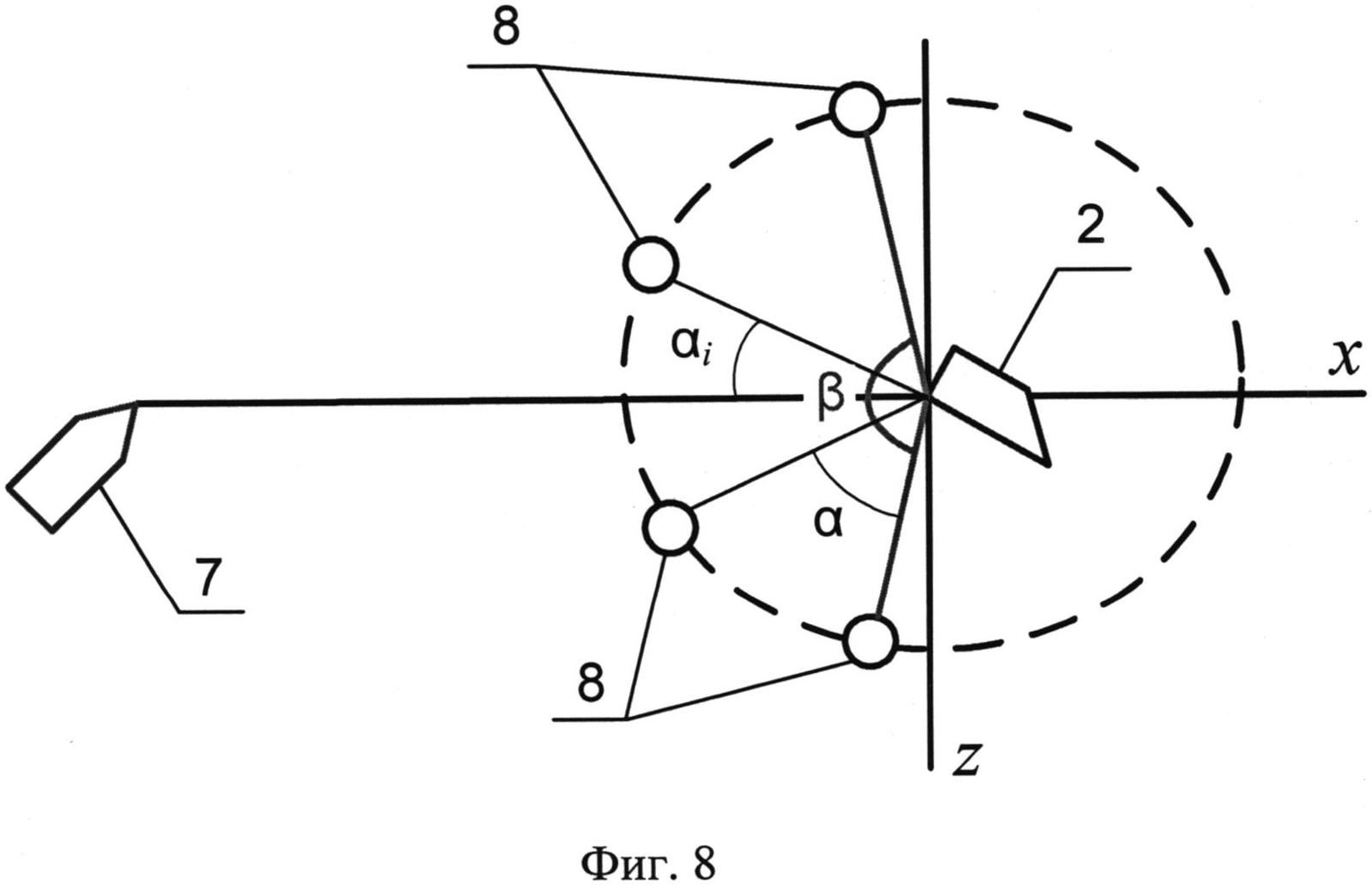
Фиг. 8 - схема постановки секторного барьера РГБР.
Сущность предлагаемого способа освещения подводной обстановки с применением автономных НПА и его техническое осуществление заключаются в следующем.
На Фиг. 1 НПА (1) производит поиск подводной цели (2) в некотором районе (3) в соответствии с установленной в ИНС программой движения (4) и включенной НСО цели (5). Посредством линии связи (6) осуществляют передачу/прием информации с НПА на НК (БП) (7).
Фиг. 2 иллюстрирует схему действия НПА (1) при обнаружении цели (2) в зоне действия своей НСО (5), об обнаружении цели НПА доносит на корабль (БП) (7) посредством действующей линии связи (6) (радиотехнической, звукоподводной или светосигнальной).
На Фиг. 3 показана схема уточнения места НПА, когда ошибки в его местонахождении на маршруте (4) превысили допустимые значения в результате длительности работы ИНС. В этом случае с НК (БП) выстреливают одиночный РГБР (8) с дальностью действия буя dб (9) в расчетную (упрежденную) точку местонахождения НПА на маршруте (4) (на схеме показан случай использования НСО НПА в активном режиме). Место приводнения РГБР (пеленг и дистанцию) регистрируют НСО НПА (1), устанавливают контакт НПА с РГБР по линии связи (10) и передают эту информацию на НК (БП) по линии связи РГБР-НК (БП) (11), где уточняют место НПА по известным координатам НК (БП) и РГБР. По линиям связи (10) и (11) осуществляют также передачу данных об обнаруженном НПА подводном объекте и команд дистанционного управления НПА.
На Фиг. 4 изображена схема постановки барьера РГБР, когда НПА не в состоянии преследовать обнаруженную цель (2) и поддерживать с ней контакт. В этом случае с НК (БП) выстреливают несколько РГБР (8) в качестве заградительного (перехватывающего) барьера (12). При подходе подводной цели на дальность действия буя dб (9) он срабатывает и передает сигнал об обнаружении цели по линии связи (11) на НК (БП), где классифицируют цель и уточняют характер ее движения.
На Фиг. 5 изображена схема постановки кругового барьера РГБР [9].
В вычислительном устройстве на НК (БП) рассчитывают радиус окружности кругового барьера по формуле

где Vц - скорость цели, м/с; t - время, необходимое для выставления буев, с; dб - дальность действия буя, м. В предлагаемом способе в отличие от способа применения РГБР [9] скорость цели Vц принимается равной текущей скорости ее движения, наблюдаемой на НПА.
Время t представляет собой сумму

где tреш - время на принятие решения, с; tподг - время на подготовку к выстреливанию РГБР, с; tпол - время полета РГБР, с; tвкл - время включения РГБР в работу после приводнения, с.
Интервал между двумя соседними буями iб (Фиг. 6) рассчитывают по формуле

Здесь k - коэффициент перекрытия зон наблюдения соседних буев.
Число буев на окружности будет равно

Число nб округляют в большую сторону.
Угол α между направлениями на два соседних буя из центра окружности (Фиг. 5) рассчитывают по формуле

Уточняют интервал между двумя соседними буями iб и коэффициент k

Координаты каждого буя (хi; zi) (Фиг. 5) определяют по формулам

Здесь xц, zц - координаты цели (2); αi - угол между направлением (2)-(7) («цель - корабль», ось «-.x») и направлением на i-й буй; α - угол между направлениями на два соседних буя из центра окружности, совпадающей с центром цели (2); n - номер буя.
Пример 1. Расчет кругового барьера РГБР (Фиг. 7).
Исходные данные:
Vц=10 м/с; tреш=60 с; tподг=30 с; tпол=60 с; tвкл=30 с; dб=2000 м; k=0,9.
Решение задачи дает следующие результаты:
t=180 с; Rб=3800 м; nб=7; α=51,4°; iб=3600 м; k=0,85.
На Фиг. 8 показана схема постановки сектора РГБР.
Сектор РГБР применяют при известном диапазоне возможных курсов подводного объекта β. Для этого по формуле (1) рассчитывают радиус сектора (Фиг. 8).
По формуле (2) рассчитывают время t постановки буев.
Интервал iб между двумя соседними буями рассчитывают по формуле (3).
Число буев в секторе будет равно

Число nб округляют в большую сторону.
Угол α между направлениями на два соседних буя из точки (2) рассчитывают по следующей формуле (фиг. 8):

Уточняют интервал между двумя соседними буями iб и коэффициент k:

Координаты каждого буя (xi; zi) рассчитывают в вычислительном устройстве в зависимости от направления генерального курса цели.
Пример 2. Расчет сектора РГБР (фиг. 8).
Исходные данные: диапазон возможных курсов подводной цели составляет угол β=120°, остальные данные соответствуют примеру 1.
Решение задачи дает следующие результаты:
t=180 c; Rб=3800 м; nб=4; α=40°; iб=2653 м; k=0,66.
О соответствии предложенного технического решения условию патентоспособности «новизна» свидетельствуют сведения, приведенные в Таблице 1 «Соответствие предложенного способа условию патентоспособности «новизна».
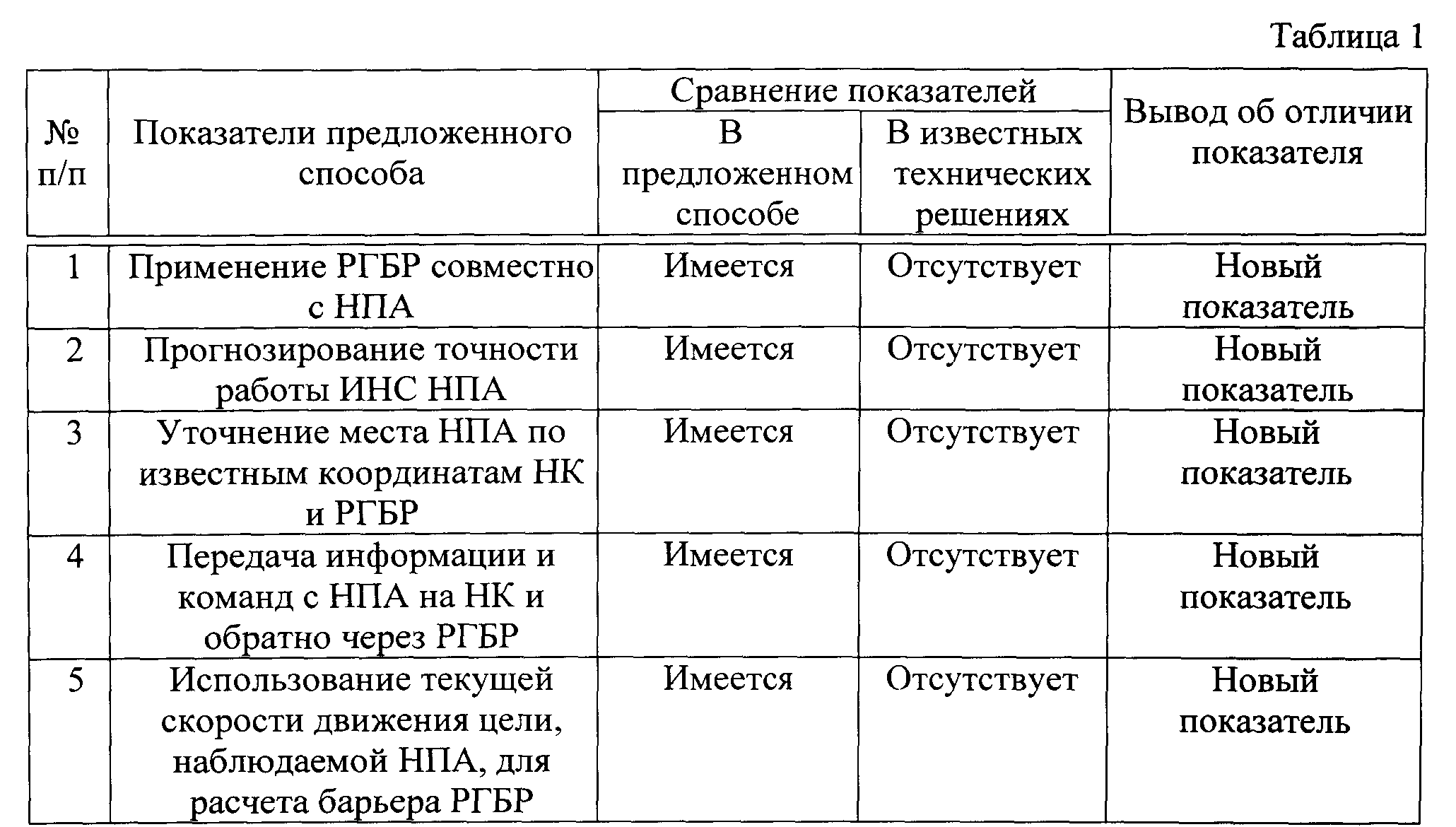
Предложенный способ соответствует условию патентоспособности «новизна», так как ни один из отличительных признаков в известных способах не обнаружен.
Достижение положительного эффекта при осуществлении предложенного способа подтверждается сведениями, приведенными в Таблице 2 «Ожидаемые эксплуатационные свойства предложенного технического решения».
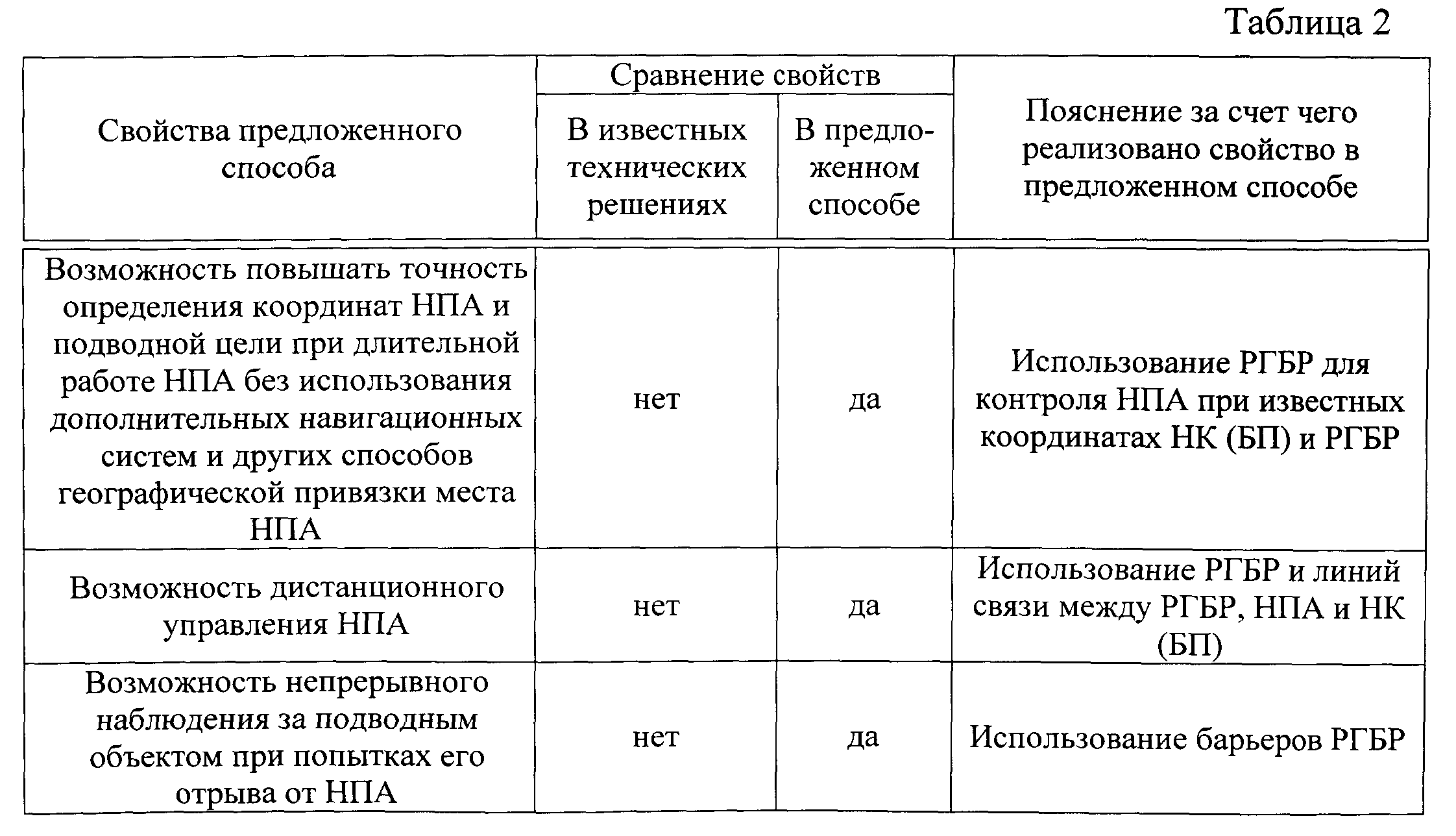
Таким образом, использование НПА совместно с РГБР позволяет осуществлять систематическое уточнение местоположения НПА, вести непрерывное наблюдение за обнаруженными НПА подводными объектами, а также дистанционно управлять работой НПА.
Источники информации
1. Попов В.А., Маркевич С.Г. Развитие отечественных гидроакустических средств поиска мин: ретроспектива и перспектива. // МРЭ, №4, 2004.
2. Сиденко К.С., Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат. // МРЭ, №2, 2008.
3. Многоцелевой автономный подводный аппарат. // ВМС и кораблестроение. Дайджест зарубежной прессы. Выпуск 70-71, СПб, 2014. С. 59.
4. Инерциальная навигационная система. // ВМС и кораблестроение. Дайджест зарубежной прессы. Выпуск 70-71, СПб, 2014. С. 108-109.
5. Новиков А.В. Подводные диверсионные силы и средства ведущих морских держав и средства борьбы с ними. - СПб, ВМИ, 2009. 138 с.
6. Техническое описание радиогидроакустического буя РГБ-Н-СТ. - М.: Воениздат, 1974.
7. Сурнин В.В., Пелевин Ю.Н., Чулков В.Л. Противолодочные средства иностранных флотов. - М.: Воениздат, 1991. 128 с.
8. Устройство радиогидроакустический буй реактивный. Патент на изобретение RU 2400392 C1, 25.05.2010. - М.: ФИПС, 2010. Бюл. №27.
9. Способ применения радиогидроакустических буев реактивных (варианты). Заявка на изобретение №2011145915 от 14.10.2011. - М.: ФИПС, 2013. Бюл. №14.
Способ поражения морской цели (варианты)
Автоматический регулятор магнитного поля подводного или надводного объекта
Судно-газовоз для перевозки сжиженного природного газа преимущественно в ледовых условиях
Способ применения радиогидроакустических буев реактивных (варианты)
Барже-буксирный состав - бункеровщик
Устройство для снижения радиолокационной заметности объектов
Способ анализа акустического поля сложного источника
Способ оптимального управления подруливающими устройствами при швартовке и прохождении узкостей
Надувной отражатель с реактивным двигателем (варианты)
Противолодочная крылатая ракета и способ ее применения
Способ поражения морской цели (варианты)
Автоматический регулятор магнитного поля подводного или надводного объекта
Судно-газовоз для перевозки сжиженного природного газа преимущественно в ледовых условиях
Барже-буксирный состав - бункеровщик
Устройство для снижения радиолокационной заметности объектов
Способ анализа акустического поля сложного источника
Способ оптимального управления подруливающими устройствами при швартовке и прохождении узкостей
Надувной отражатель с реактивным двигателем (варианты)
Противолодочная крылатая ракета и способ ее применения
Способ определения степени черноты поверхности материалов

