Результат интеллектуальной деятельности: ДВУХОСНАЯ ПЛАТФОРМА ДЛЯ ИСПОЛЬЗОВАНИЯ В БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ, ТРЕХОСНАЯ ПЛАТФОРМА ДЛЯ ИСПОЛЬЗОВАНИЯ В БЕСПИЛОТНОМ ЛЕТАТЕЛЬНОМ АППАРАТЕ И МНОГОВИНТОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к области беспилотных летательных аппаратов, и в особенности к двухосной платформе для использования в беспилотном летательном аппарате, трехосной платформе для использования в беспилотном летательном аппарате и многоосном летательном аппарате с целью аэросъемки или наблюдения.
УРОВЕНЬ ТЕХНИКИ
Беспилотные летательные аппараты характеризуются малой габаритностью, малым весом, низкой стоимостью, гибкой работой и высокой характеристикой безопасности, и могут широко использоваться в различных областях, таких как аэросъемка, наблюдение, поиск и спасение и разведка ресурсов. Поскольку беспилотный летательный аппарат сам испытывает высокочастотную вибрацию и низкие флуктуации частоты, он должен быть оборудован стабилизующей платформой для аэросъемки для удерживания видеокамеры или фотокамеры для достижения стабильной аэросъемки. Обычно стабилизирующие платформы для аэросъемки обнаруживают изменения положения видеокамеры и фотокамеры с помощью электронной аппаратуры и управляют обратной компенсацией управляющего двигателя для стабилизации видеокамеры или фотокамеры.
В известном уровне техники большинство платформ использует механический привод движения для запуска вращения двухосной, трехосной или многоосной видеокамеры или фотокамеры. Поскольку механический привод обычно имеет задержку, когда беспилотный летательный аппарат находится в различных положениях, таких как поворачивание, свободный полет, набор высоты, падение или наклон, платформа имеет долгое время отклика, управляющий двигатель медленно регулирует, так что очень затруднительно для видеокамеры или фотокамеры отрегулировать угол своевременно для приспосабливания к регулированию положений беспилотного летательного аппарата, что влияет на качество изображения видеокамеры или фотокамеры. Между тем большинство двухосных или трехосных платформ для беспилотных летательных аппаратов не достаточно стабильны, фотокамера внезапно трясется во время изменения положений беспилотного летательного аппарата, и влияние, оказываемое низкочастотной тряской или наклоном корпуса машины, не может быть устранено, действительно очень затруднительно снимать высококачественные изображения на профессиональном уровне.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Для решения технической проблемы недостаточной стабильности беспилотного летательного аппарата, из-за которой в известном уровне техники снижается качество съемки устройства для ведения съемки, настоящее изобретение предусматривает двухосную платформу для использования в беспилотном летательном аппарате, трехосную платформу для использования в беспилотном летательном аппарате и многоосный летательный аппарат.
Техническое решение данного изобретения для решения технической проблемы является следующим: двухосная платформа для использования в беспилотном летательном аппарате сконструирована и охарактеризована тем, что содержит: раму в сборе, трансмиссионный блок и устройство для ведения съемки, рама в сборе содержит первую скобу, вторую скобу и третью скобу, устройство для ведения съемки закреплено на первой скобе, первая скоба установлена с возможностью вращения совместно со второй скобой, и вторая скоба установлена с возможностью вращения совместно с третьей скобой; трансмиссионный блок содержит первый двигатель и второй двигатель, при этом первый двигатель приводит в движение первую скобу для вращения вокруг ее оси вращения относительно второй скобы, а второй двигатель приводит в движение вторую скобу для вращения вокруг ее оси вращения относительно третьей скобы; и двухосная платформа дополнительно содержит соединительный элемент, который имеет два свободных конца, которые установлены с возможностью вращения соответственного на двух открытых концах второй скобы, и соединительный элемент закреплен на третьей скобе с помощью элемента крепления.
Настоящее изобретение предусматривает двухосную платформу для использования в беспилотном летательном аппарате, в частности, соединительный элемент содержит первое соединительное звено, второе соединительное звено и третье соединительное звено, которые шарнирно последовательно соединены; один свободный конец первого соединительного звена шарнирно установлен на одном конце второй скобы, один свободный конец третьего соединительного звена шарнирно установлен на другом конце второй скобы; а средняя часть второго соединительного звена зафиксирована на третьей скобе с помощью элемента крепления.
Настоящее изобретение предусматривает двухосную платформу для использования в беспилотном летательном аппарате, дополнительно содержащую опорный кронштейн, один конец опорного кронштейна закреплен на третьей скобе, а другой конец снабжен установочным отверстием, подогнанным под элемент крепления, и второе соединительное звено закреплено на опорном кронштейне с помощью элемента крепления.
Настоящее изобретение предусматривает двухосную платформу для использования в беспилотном летательном аппарате. Предпочтительно статор первого двигателя закреплен на первой скобе, а ротор первого двигателя жестко установлен совместно со второй скобой; статор второго двигателя закреплен на третьей скобе, а ротор второго двигателя жестко установлен совместно со второй скобой.
Настоящее изобретение предусматривает двухосную платформу для использования в беспилотном летательном аппарате. Предпочтительно центр тяжести первой скобы и устройства для ведения съемки приходится на ось вращения первой скобы.
Настоящее изобретение предусматривает двухосную платформу для использования в беспилотном летательном аппарате. Предпочтительно центр тяжести первой скобы, второй скобы и устройства для ведения съемки в целом приходится на ось вращения второй скобы.
Настоящее изобретение предусматривает трехосную платформу для использования в беспилотном летательном аппарате, которая содержит раму в сборе, трансмиссионный блок и устройство для ведения съемки, охарактеризованную тем, что рама в сборе содержит первую скобу, вторую скобу и третью скобу, устройство для ведения съемки закреплено на первой скобе, первая скоба установлена с возможностью вращения совместно со второй скобой, вторая скоба установлена с возможностью вращения совместно с третьей скобой; трансмиссионный блок содержит первый двигатель, второй двигатель и третий двигатель, при этом первый двигатель приводит в движение первую скобу для вращения вокруг ее оси вращения относительно второй скобы, а второй двигатель приводит в движение вторую скобу для вращения вокруг ее оси вращения относительно третьей скобы, и третий двигатель приводит в движение третью скобу для вращения вокруг ее оси вращения Z относительно соединительной рамы; трехосная платформа дополнительно содержит соединительный элемент, который имеет два свободных конца, которые установлены с возможностью вращения соответственно на двух открытых концах второй скобы, и соединительный элемент закреплен на третьей скобе с помощью элемента крепления.
Настоящее изобретение предусматривает трехосную платформу для использования в беспилотном летательном аппарате. В частности, соединительный элемент содержит первое соединительное звено, второе соединительное звено и третье соединительное звено, которые шарнирно соединены последовательно; один свободный конец первого соединительного звена шарнирно установлен на одном конце второй скобы, один свободный конец третьего соединительного звена шарнирно установлен на другом конце второй скобы; а средняя часть второго соединительного звена зафиксирована на третьей скобе с помощью элемента крепления.
Настоящее изобретение предусматривает трехосную платформу для использования в беспилотном летательном аппарате, которая дополнительно содержит опорную скобу, один конец опорной скобы закреплен на третьей скобе, а другой конец снабжен установочным отверстием, подогнанным под элемент крепления, и при этом второе соединительное звено закреплено на опорной скобе с помощью элемента крепления.
Настоящее изобретение дополнительно предусматривает многовинтовой летательный аппарат, который содержит трехосную платформу для использования в беспилотном летательном аппарате, и многовинтовую установочную раму и окружное устройство, многовинтовая установочная рама содержит основание, по меньшей мере, три несущих рычага, вставленных и закрепленных на основании, элемент несущего винта, закрепленный на одном конце каждого несущего рычага, и множество опорных рам, которые установлены проходящими вдоль основания и используются для размещения внешне; трехосная платформа для использования в беспилотном летательном аппарате жестко установлена на основании посредством соединительной рамы.
Настоящее изобретение дополнительно предусматривает платформу для использования в беспилотном летательном аппарате, которая содержит раму в сборе, трансмиссионный блок и устройство для ведения съемки, охарактеризованную тем, что рама в сборе содержит первую скобу, вторую скобу, третью скобу и соединительный элемент, устройство для ведения съемки закреплено на первой скобе, первая скоба установлена с возможностью вращения совместно со второй скобой, вторая скоба установлена с возможностью вращения совместно с третьей скобой, а соединительный элемент и вторая скоба (4) образуют четырехзвенный соединительный механизм;
трансмиссионный блок содержит первый двигатель и четвертый двигатель, при этом первый двигатель непосредственно приводит в движение первую скобу для вращения относительно второй скобы, а четвертый двигатель непосредственно приводит в движение соединительный элемент вызывая вращение второй скобы относительно третьей скобы.
Настоящее изобретение предусматривает платформу для использования в беспилотном летательном аппарате. В частности, соединительный элемент содержит первое соединительное звено, второе соединительное звено и третье соединительное звено, которые шарнирно соединены в таком порядке; один свободный конец первого соединительного звена шарнирно установлен на одном конце второй скобы, один свободный конец третьего соединительного звена шарнирно установлен на другом конце второй скобы; второе соединительное звено зафиксировано на третьей скобе с помощью четвертого двигателя.
Настоящее изобретение предусматривает платформу для использования в беспилотном летательном аппарате, которая дополнительно содержит опорный кронштейн, один конец опорного кронштейна закреплен на третьей скобе, а другой конец жестко соединен со статором четвертого двигателя; ротор четвертого двигателя жестко соединен со вторым соединительным звеном; или один конец опорной скобы закреплен на третьей скобе, а другой конец жестко соединен с ротором четвертого двигателя; статор четвертого двигателя жестко соединен со вторым соединительным звеном.
Настоящее изобретение предусматривает платформу для использования в беспилотном летательном аппарате. Кроме того, вторая скоба находится в открытом положении в “U” виде, и один свободный конец первого соединительного звена и один свободный конец третьего соединительного звена соответственно установлены с возможностью вращения в двух открытых концах второй скобы.
Настоящее изобретение предусматривает платформу для использования в беспилотном летательном аппарате. Кроме того, рама в сборе дополнительно содержит соединительную раму для размещения внешне, и трансмиссионный блок дополнительно содержит третий двигатель; а третий двигатель приводит в движение третью скобу для вращения относительно соединительной рамы.
Настоящее изобретение предусматривает платформу для использования в беспилотном летательном аппарате. Кроме того, трансмиссионный блок дополнительно содержит второй двигатель, который непосредственно приводит в движение вторую скобу для вращения относительно третьей скобы.
Настоящее изобретение может обеспечить следующие преимущества: свободные концы соединительного элемента шарнирно установлены на второй скобе для совместного образования параллелограмма. В соответствии с принципами параллелограмма при вращении второй скобы под определенным углом относительно третьей скобы, соединительный элемент вращается под тем же углом вместе с ним, не мешая траектории движения второй скобы; между тем соединительный элемент закреплен на третьей скобе с помощью элемента крепления, соединительный элемент обеспечивает эффективную поддержку для двух открытых концов второй скобы в вертикальном направлении, увеличивает нагрузку и жесткость второй скобы и эффективно снижает величину деформации, когда вторая скоба имеет большую нагрузку; при этом снижает собственный вес второй скобы и уменьшает диаметр второго двигателя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение будет далее описано примерами со ссылкой на чертежи и варианты осуществления изобретения, на которых:
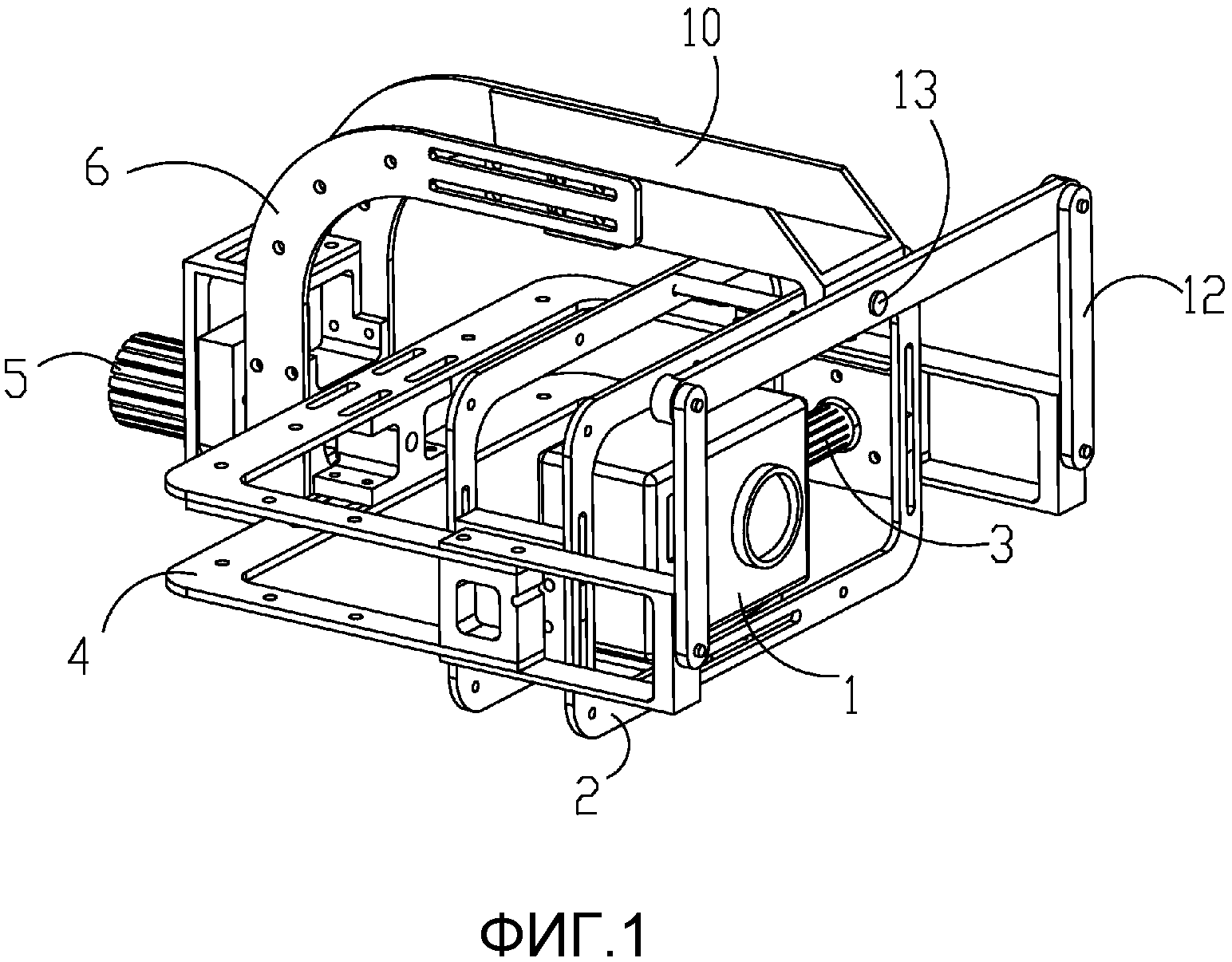
Фиг.1 иллюстрирует схематический вид конструкции двухосной платформы для использования в беспилотном летательном аппарате в соответствии с первым вариантом осуществления настоящего изобретения;
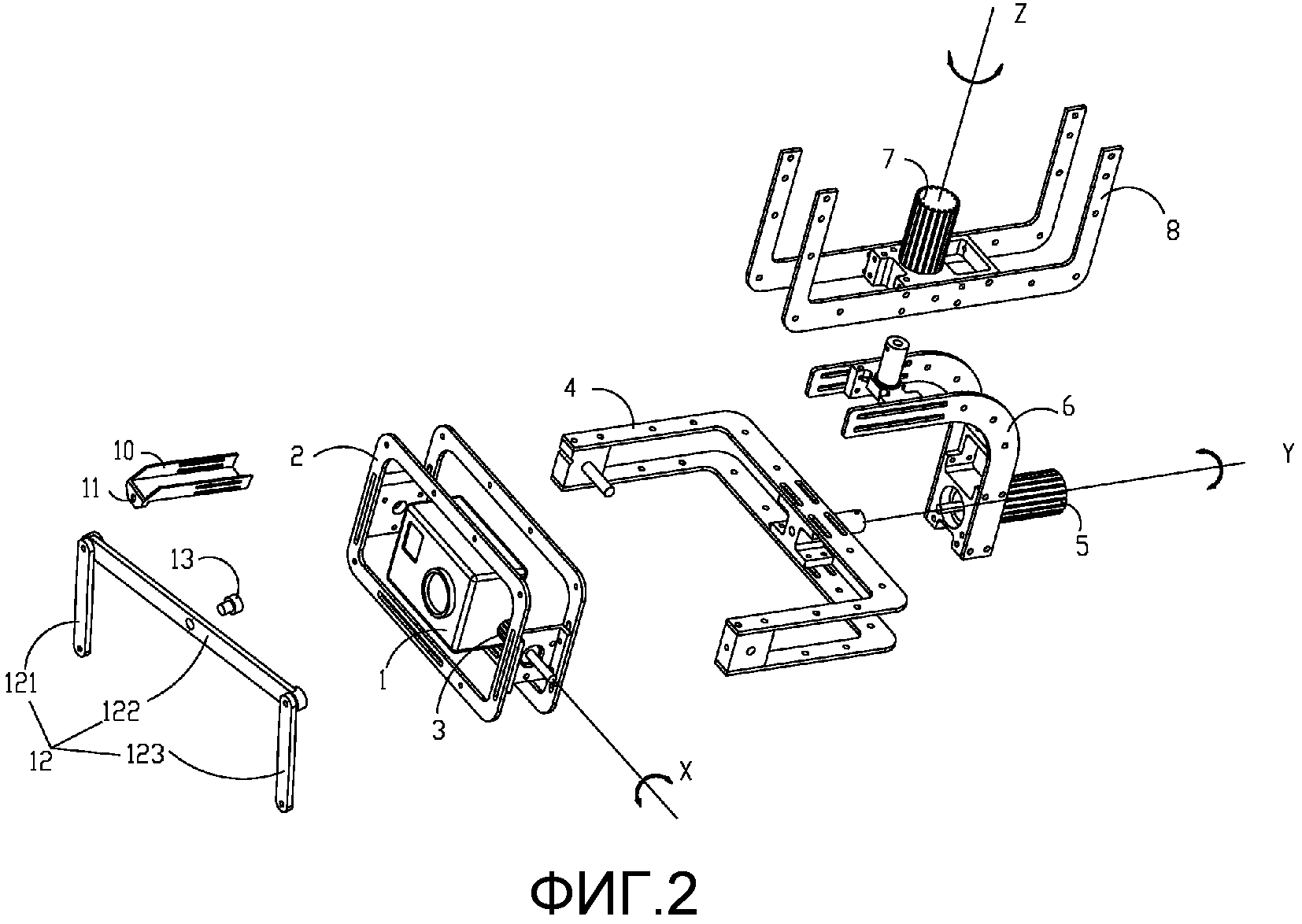
Фиг.2 иллюстрирует вид 1 трехосной платформы в разобранном виде для использования в беспилотном летательном аппарате в соответствии со вторым вариантом осуществления настоящего изобретения;
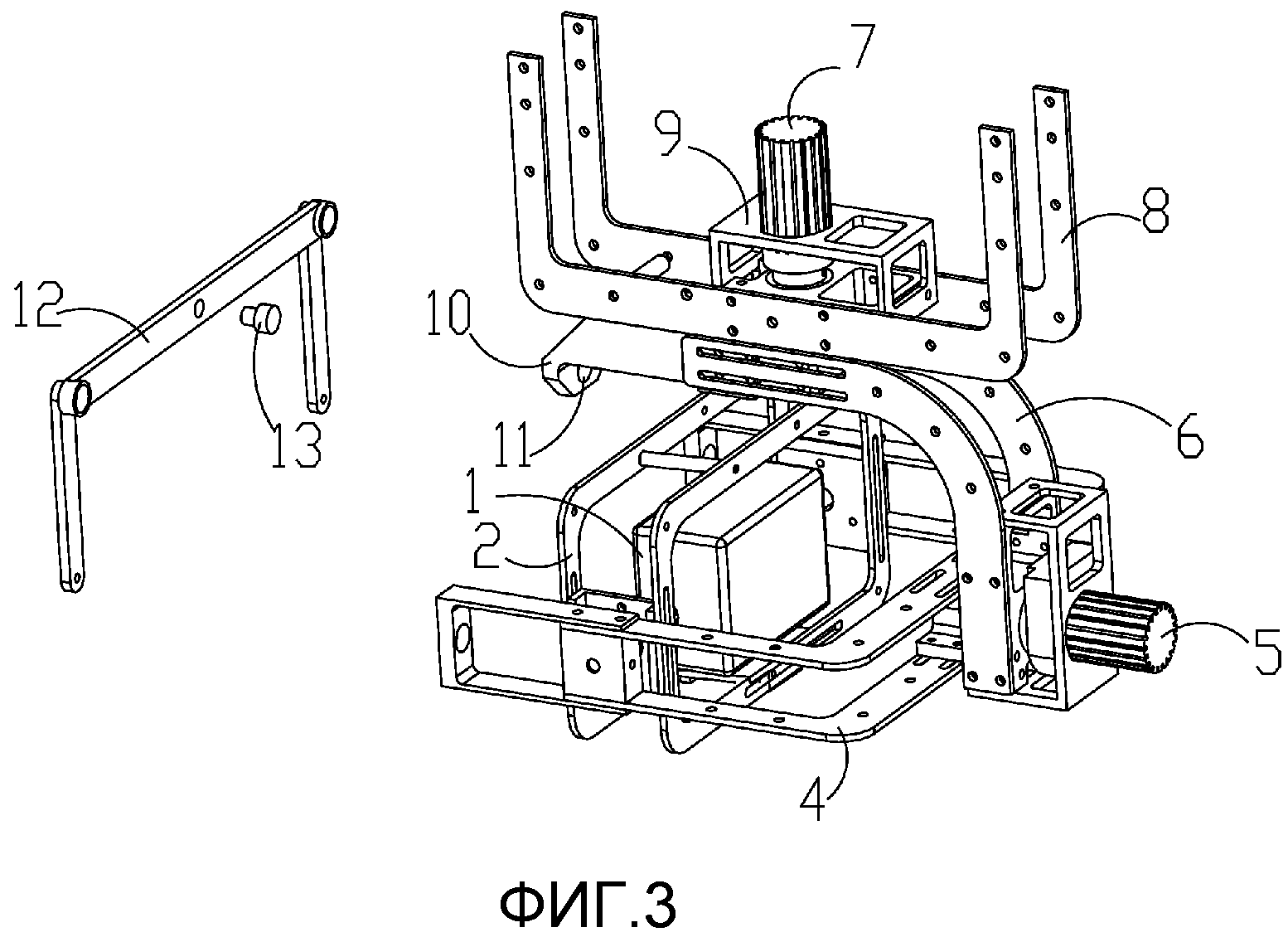
Фиг.3 иллюстрирует вид 2 трехосной платформы в разобранном виде для использования в беспилотном летательном аппарате в соответствии со вторым вариантом осуществления настоящего изобретения;
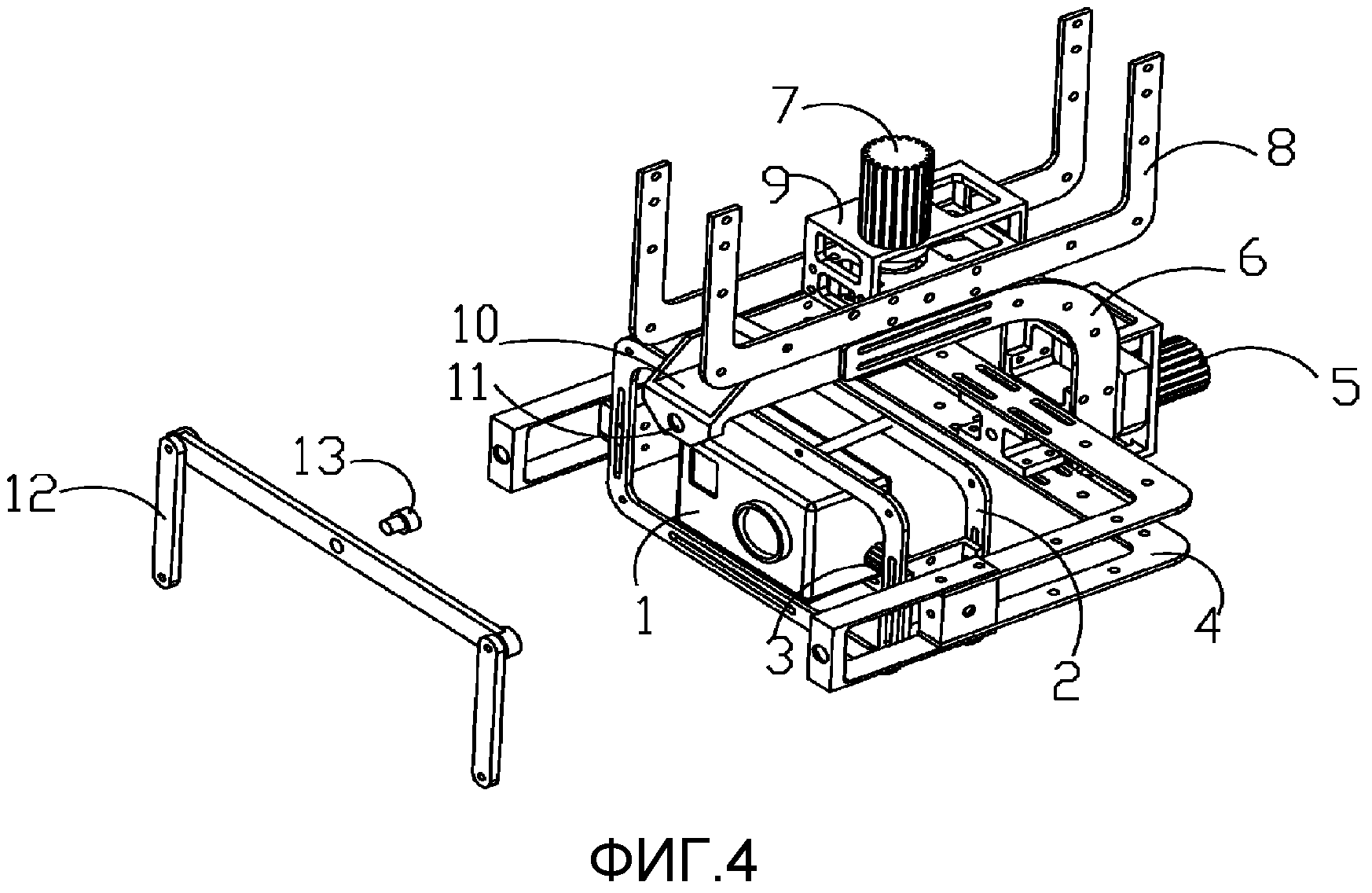
Фиг.4 иллюстрирует вид 2 трехосной платформы в разобранном виде для использования в беспилотном летательном аппарате в соответствии со вторым вариантом осуществления настоящего изобретения;
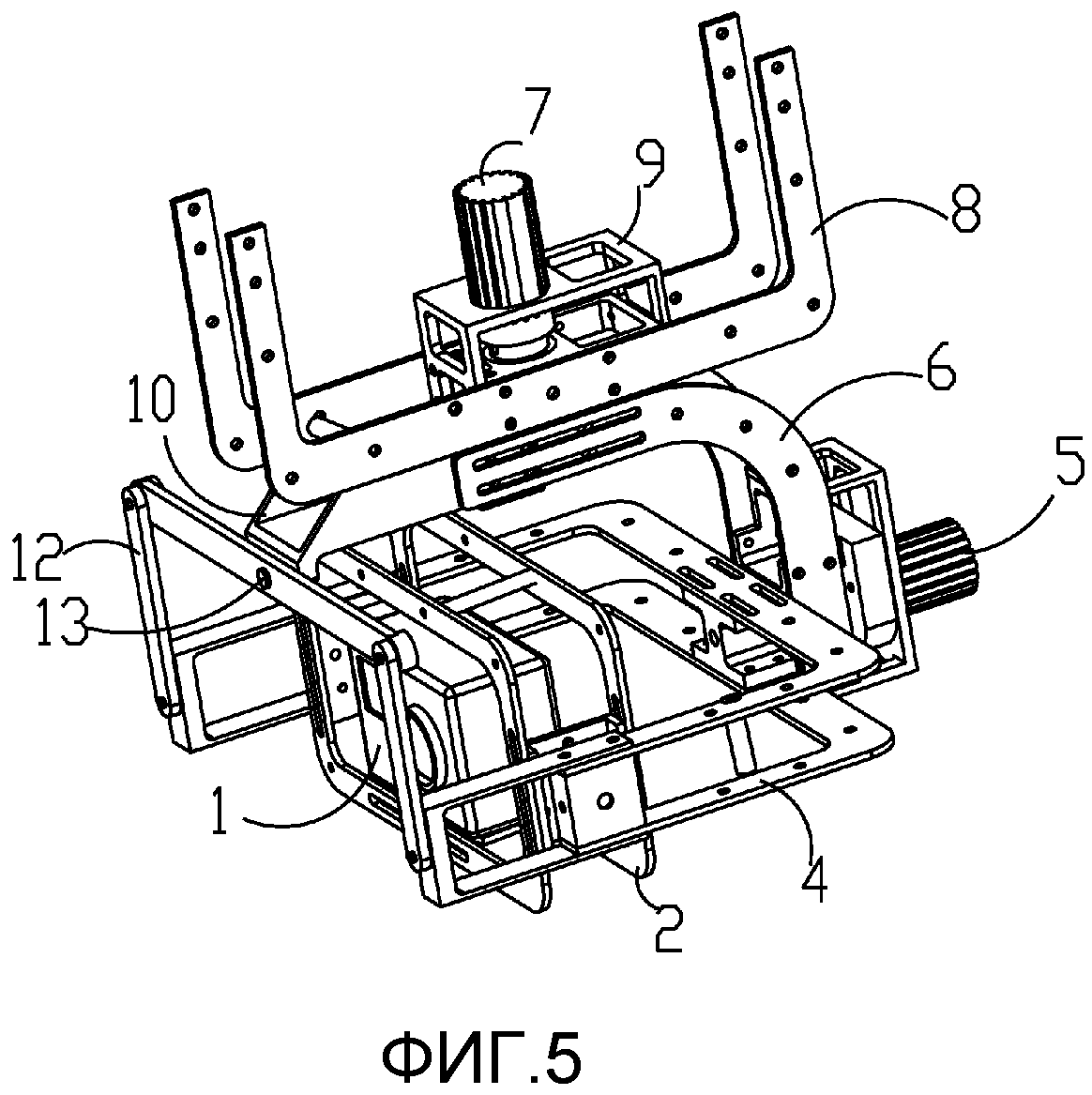
Фиг.5 иллюстрирует схематический вид конструкции 1 трехосной платформы для использования в беспилотном летательном аппарате в соответствии со вторым вариантом осуществления настоящего изобретения;
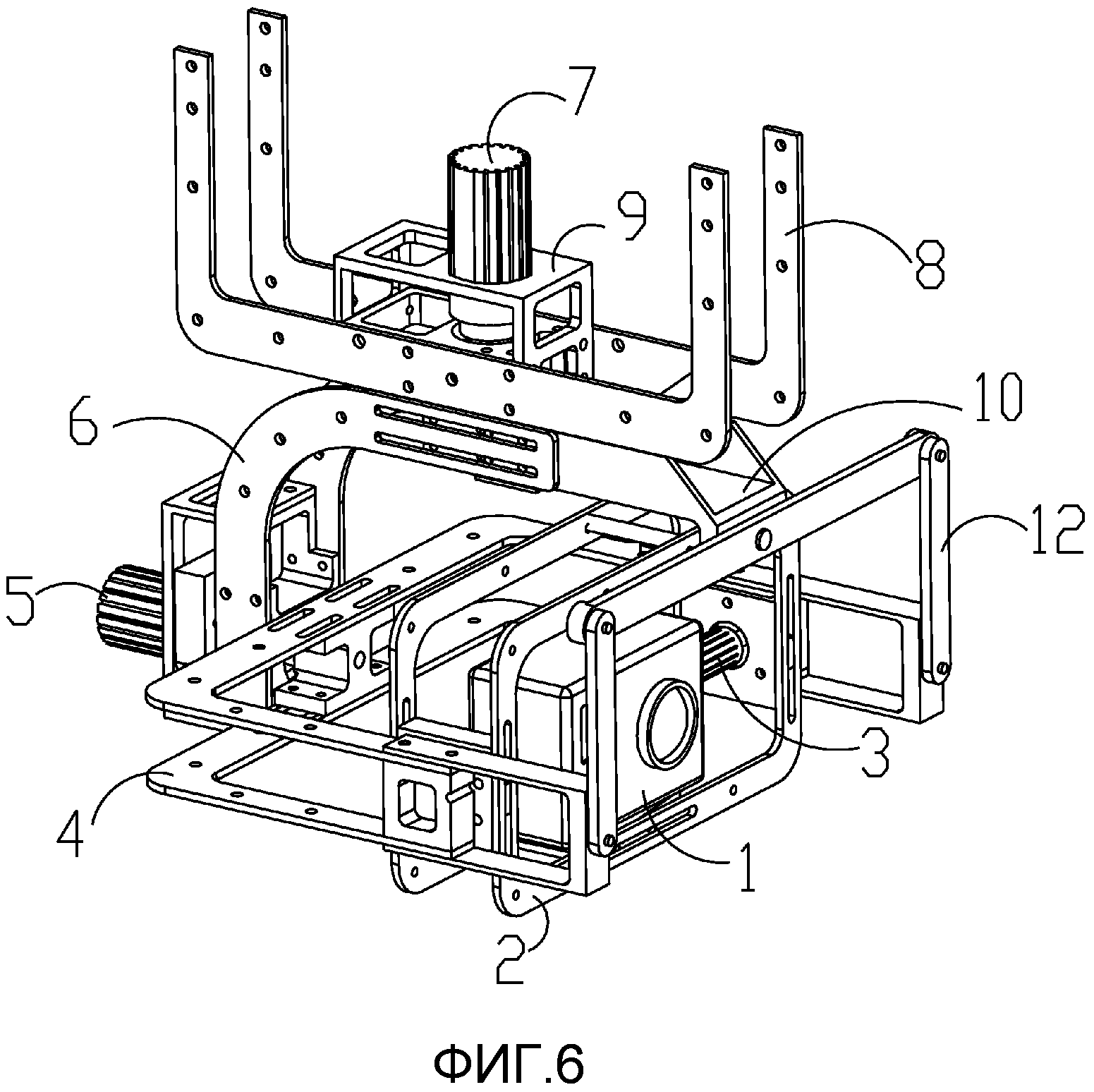
Фиг.6 иллюстрирует схематический вид конструкции 2 трехосной платформы для использования в беспилотном летательном аппарате в соответствии со вторым вариантом осуществления настоящего изобретения;
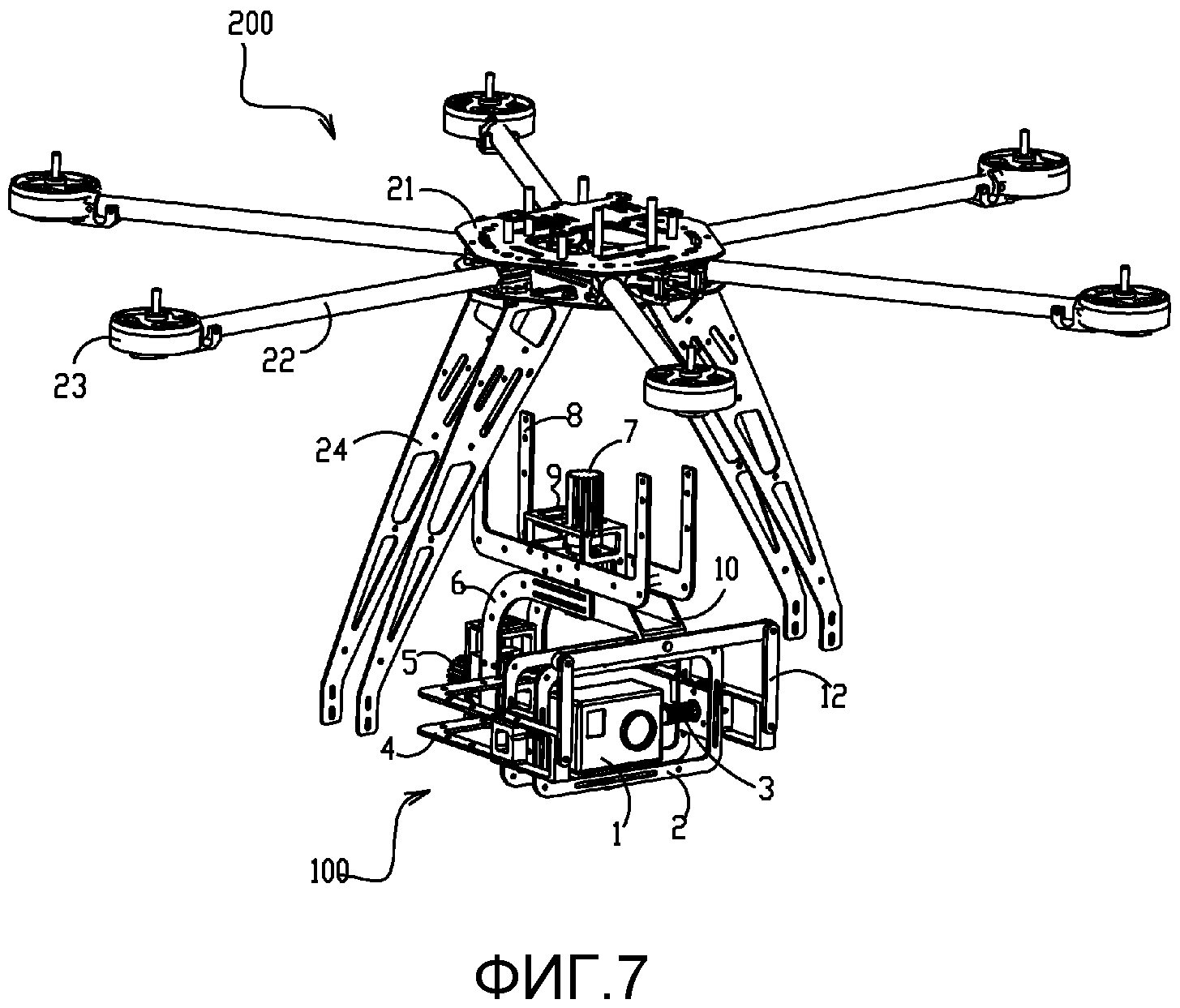
Фиг.7 иллюстрирует вид 1 многовинтового летательного аппарата в разобранном виде в соответствии с третьим вариантом осуществления настоящего изобретения;
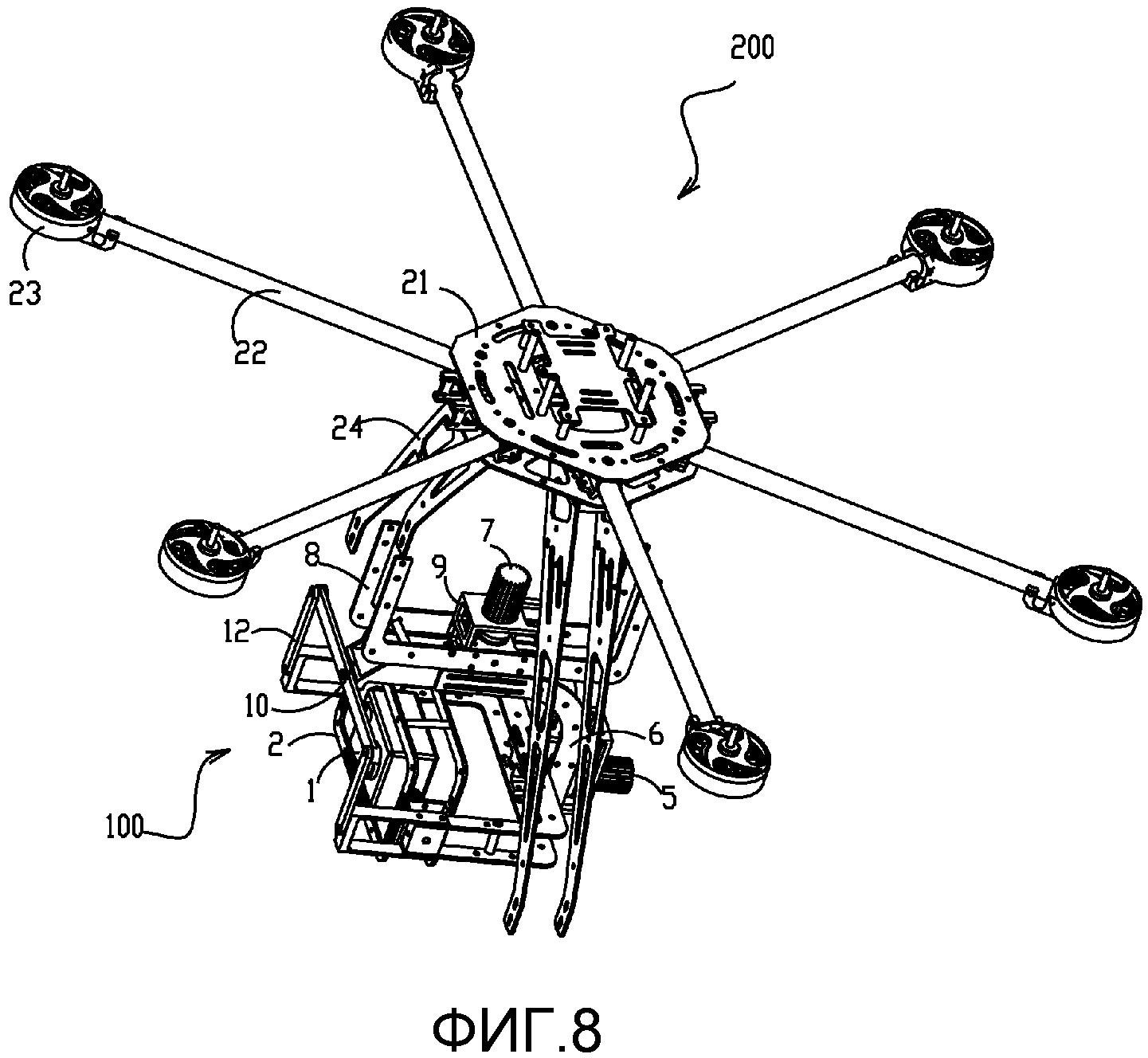
Фиг.8 иллюстрирует вид 2 многовинтового летательного аппарата в разобранном виде в соответствии с третьим вариантом осуществления настоящего изобретения;
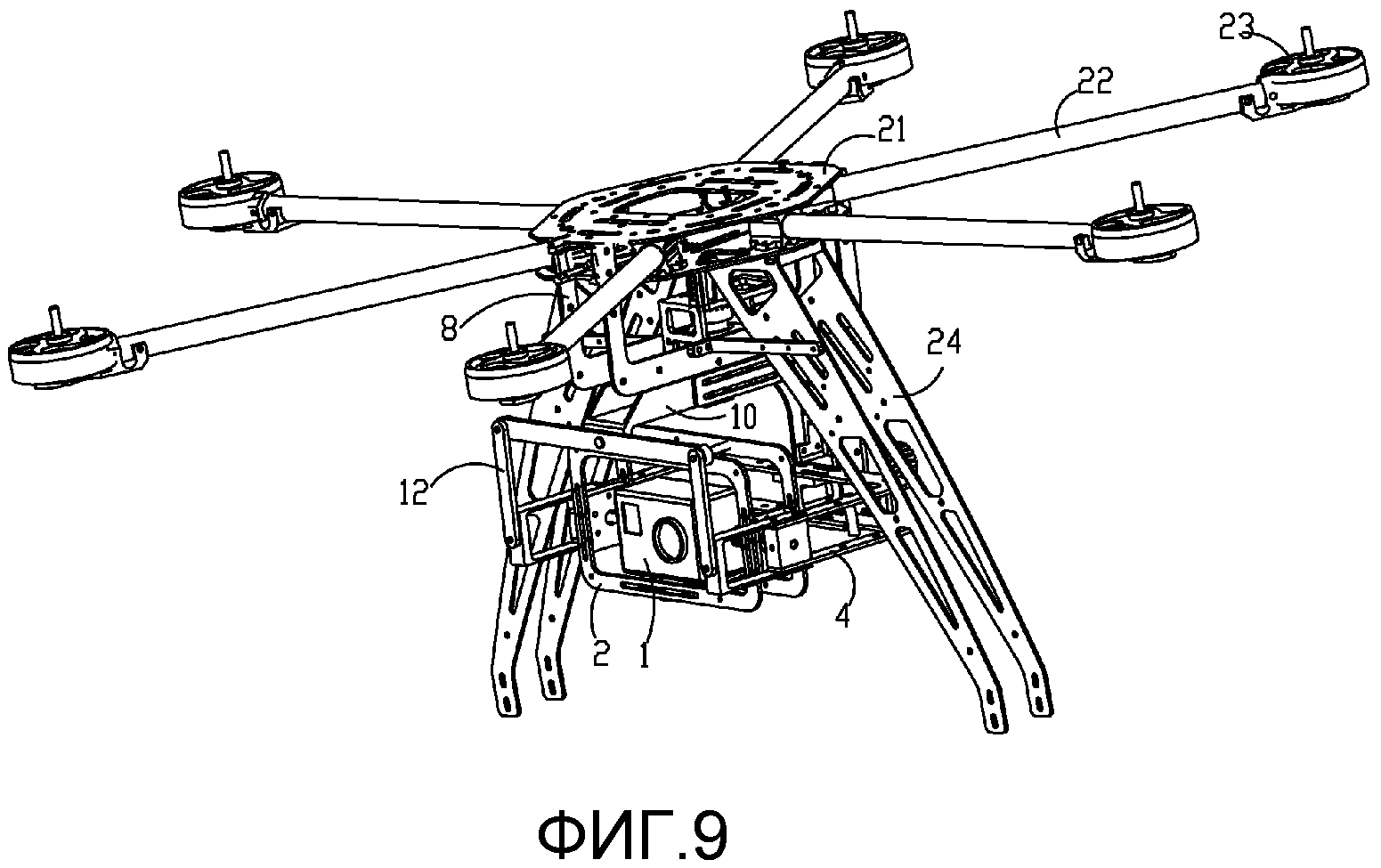
Фиг.9 иллюстрирует схематический вид конструкции 1 многовинтового летательного аппарата в соответствии с третьим вариантом осуществления настоящего изобретения;
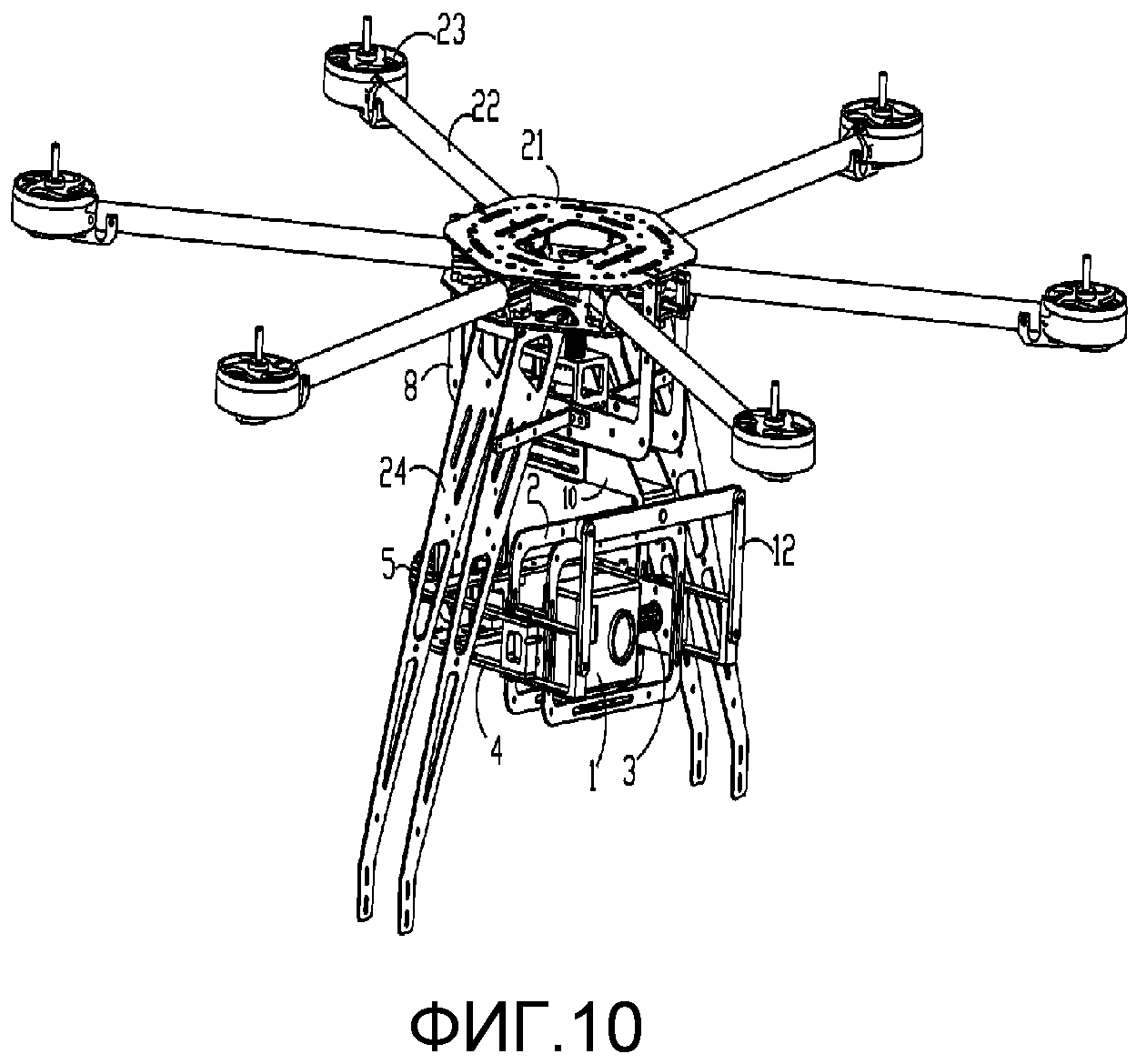
Фиг.10 иллюстрирует схематический вид конструкции 2 многовинтового летательного аппарата в соответствии с третьим вариантом осуществления настоящего изобретения;
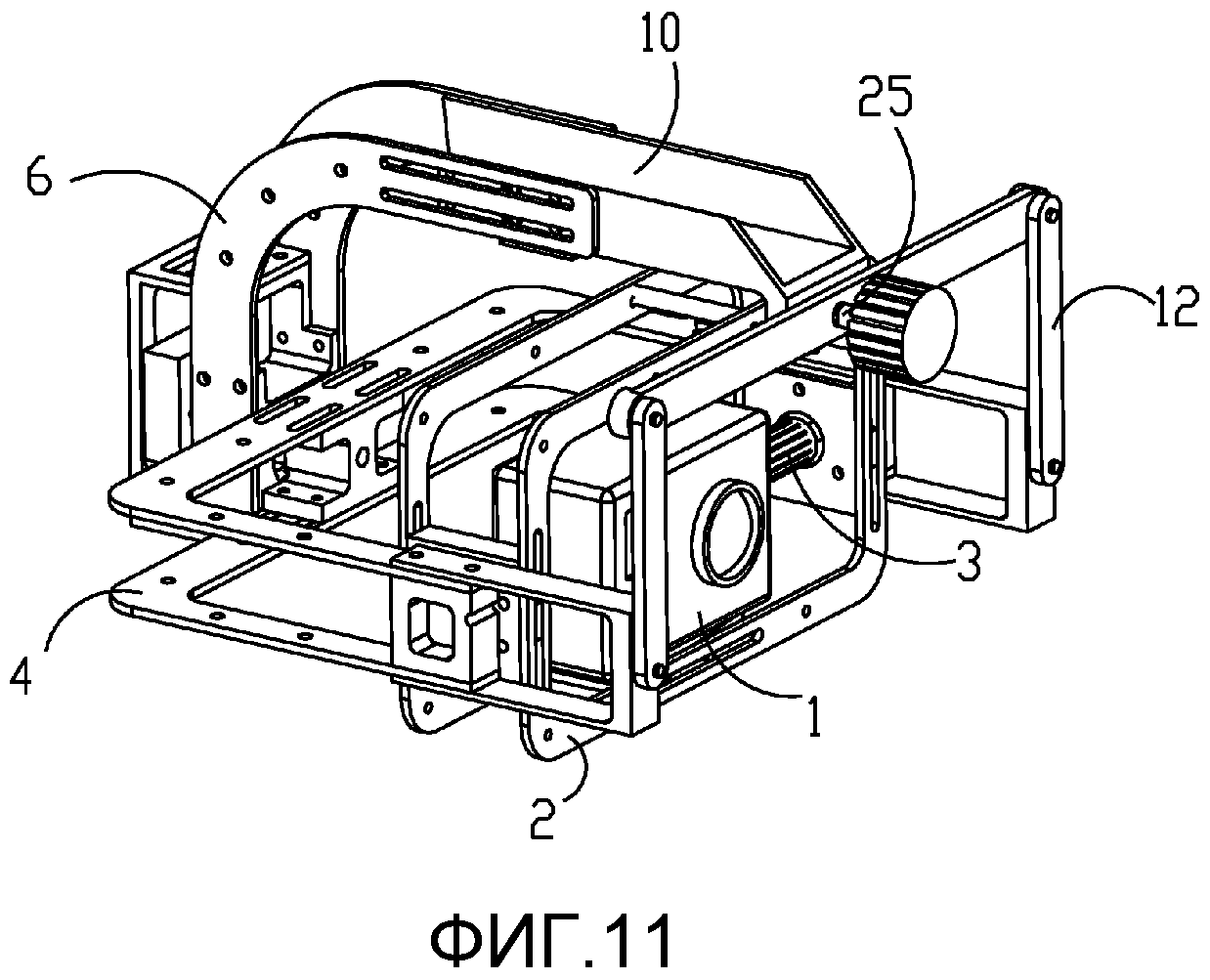
Фиг.11 иллюстрирует схематический вид конструкции 1 платформы для использования в беспилотном летательном аппарате в соответствии с четвертым вариантом осуществления настоящего изобретения;
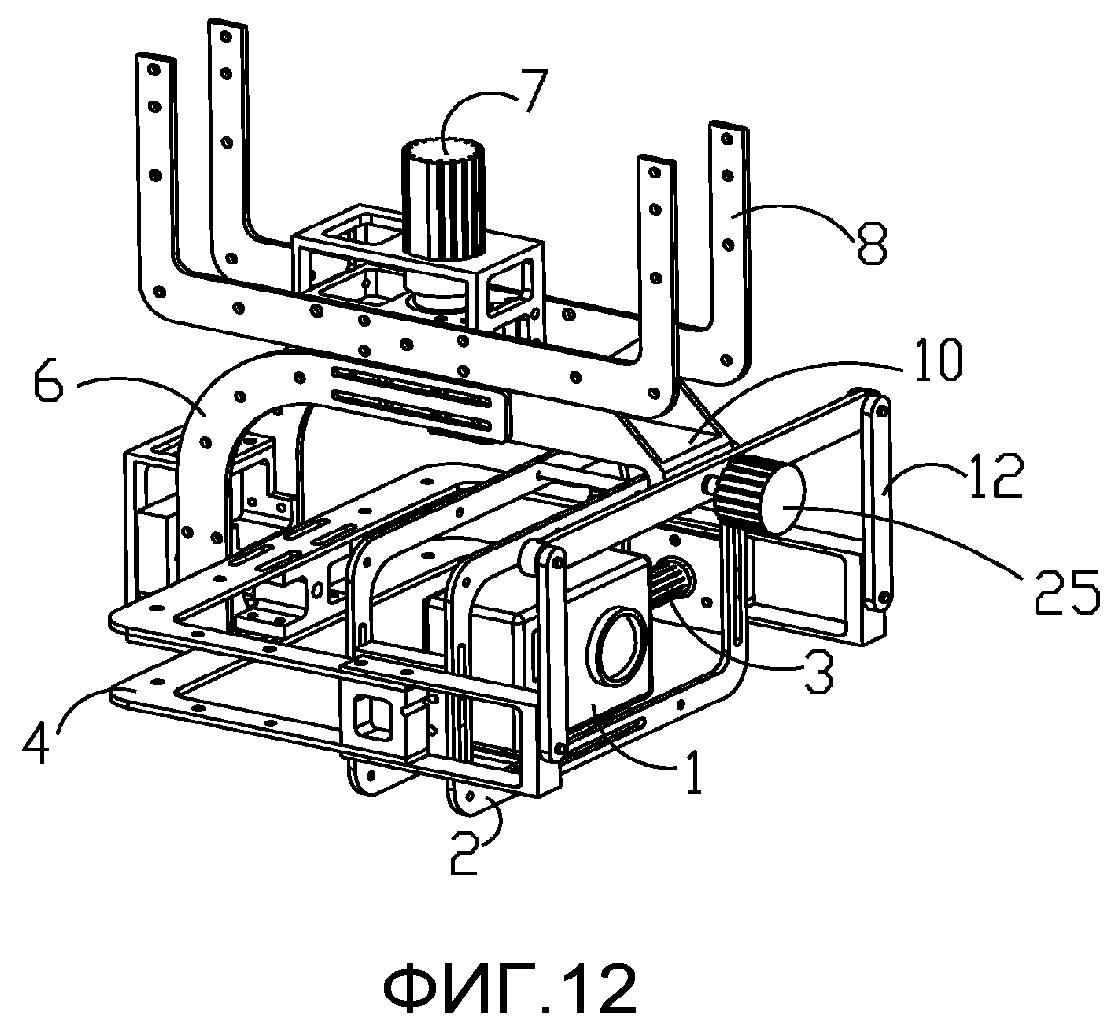
Фиг.12 иллюстрирует схематический вид конструкции 2 платформы для использования в беспилотном летательном аппарате в соответствии с четвертым вариантом осуществления настоящего изобретения;
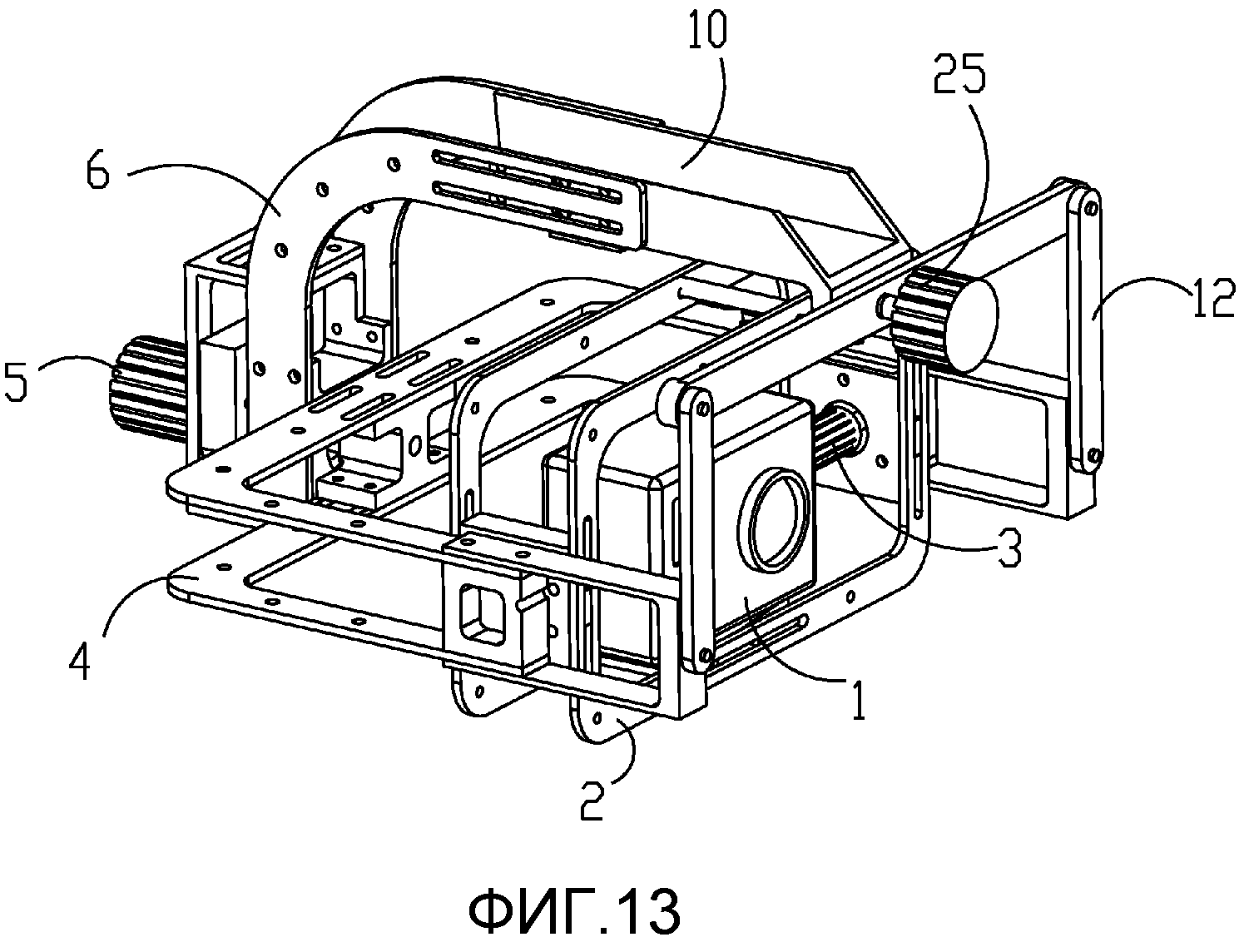
Фиг.13 иллюстрирует схематический вид конструкции 3 платформы для использования в беспилотном летательном аппарате в соответствии с четвертым вариантом осуществления настоящего изобретения;
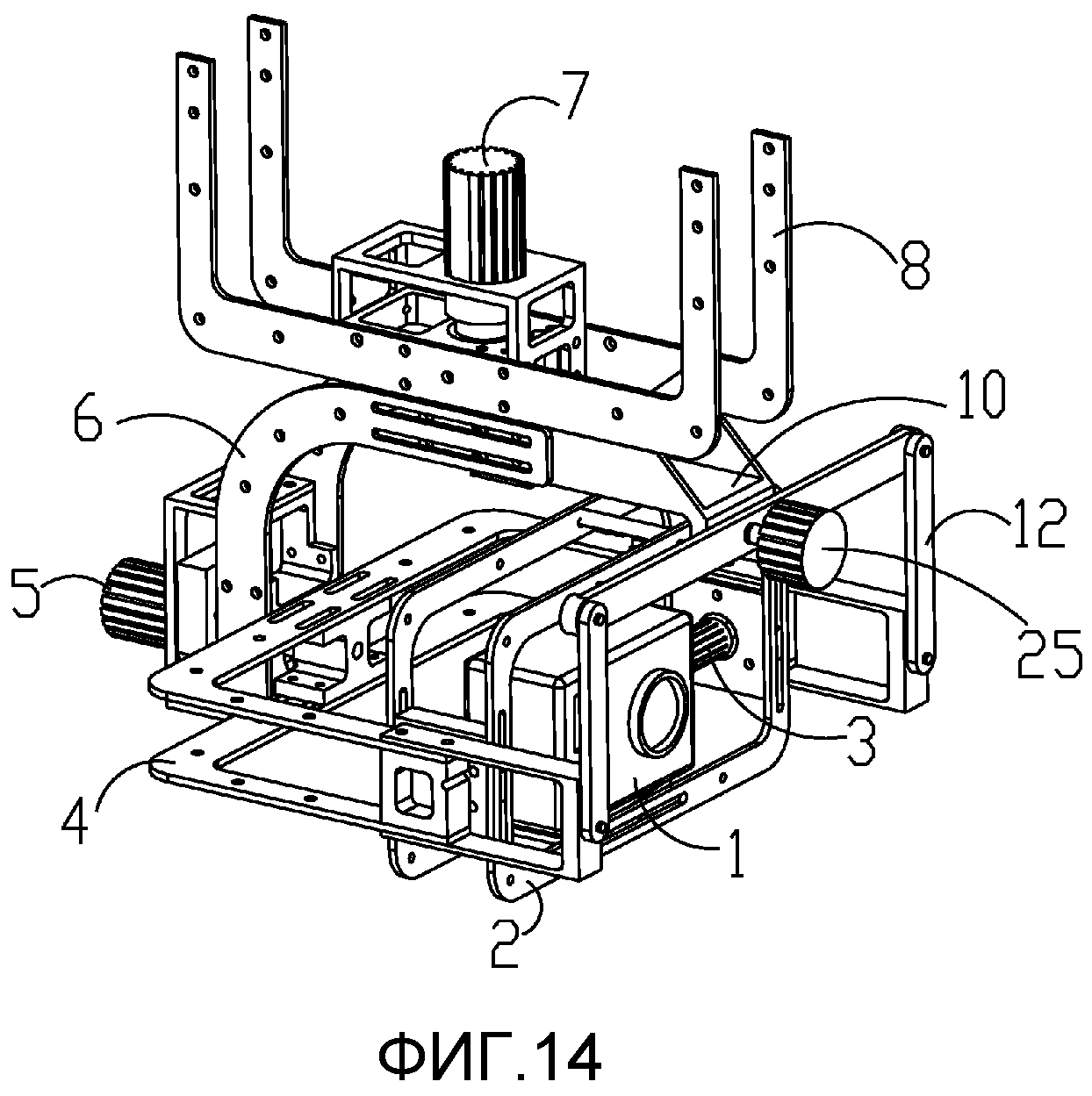
Фиг.14 иллюстрирует схематический вид конструкции 4 платформы для использования в беспилотном летательном аппарате в соответствии с четвертым вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Конкретные варианты осуществления настоящего изобретения будут описаны подробно со ссылкой на фигуры, чтобы сделать технические особенности, объекты и эффекты настоящего изобретения четко понятными.
Вариант осуществления 1
В варианте осуществления, изображенном на фиг.1, настоящее изобретение предусматривает двухосную платформу для беспилотного летательного аппарата, которая содержит раму в сборе, трансмиссионный блок и устройство для ведения съемки 1. Рама в сборе содержит первую скобу 2, вторую скобу 4 и третью скобу 6, устройство для ведения съемки 1 закреплено на первой скобе 2, и первая скоба 2 установлена с возможностью вращения совместно со второй скобой 4, а вторая скоба 4 установлена с возможностью вращений совместно с третьей скобой 6. Здесь форма устройства для ведения съемки 1 не ограничивается квадратной формой, как изображено на фиг.1, и она может быть круглой, овальной или в другом виде, как часто видно на рынке. Трансмиссионный блок содержит первый двигатель 3 и второй двигатель 5, при этом первый двигатель 3 приводит в движение первую скобу 2 для вращения вокруг ее оси вращения относительно второй скобы 4, а второй двигатель 5 приводит в движение вторую скобу 4 для вращения вокруг ее оси вращения относительно третьей скобы 6. В настоящем варианте осуществления изобретения предусмотренным источником питания является двигатель. Использование малогабаритного двигателя имеет следующие преимущества: (1) двигатель непосредственно запускается с низкими потреблениями энергии, тем самым экономя энергию и осуществляя защиту окружающей среды; (2) двигатель имеет более короткое время отклика и может своевременно и быстро приспосабливаться для адаптирования при различных положениях полета беспилотного летательного аппарата с тем, чтобы улучшить стабильность съемки устройства для ведения съемки. Два свободных конца второй скобы 4 выступают наружу, первая скоба 2 и устройство для ведения съемки 1 интегрально установлены с возможностью вращения между двумя свободными концами; во время вращения второй скобы 4, приводимой в движение вторым двигателем 5, тем более длина двух свободных концов второй скобы 4, чем отдален центр тяжести первой скобы 2 и устройства для ведения съемки 1 от точки положения второй скобы 4 так, что вторая скоба 4 дрожит сильнее и менее стабильно устройство для съемки 1. Для того чтобы снизить дрожание второй скобы 4 и улучшить стабильность, как изображено на фиг.1, платформа дополнительно содержит соединительный элемент 12, два свободных конца которого соответственно устанавливают вращательными на двух открытых концах второй скобы 4, соединительный элемент 12 закреплен на третьей скобе 6 с помощью элемента крепления 13. В настоящем изобретении свободные концы соединительного элемента 12 шарнирно установлены на второй скобе 4 для совместного образования параллелограмма. В соответствии с принципами параллелограмма при вращении второй скобы 4 под определенным углом относительно третьей скобы 6, соединительный элемент 12 вращается под тем же углом вместе с ним, не мешая траектории движения второй скобы 4; при этом соединительный элемент 12 закреплен на третьей скобе 6 с помощью элемента крепления 13, тем самым обеспечивая поддержку и расположение двух открытых концов второй скобы 4 и увеличивая стабильность второй скобы 4. Свободные концы соединительного элемента 12 шарнирно установлены на второй скобе 4 для совместного образования параллелограмма. В соответствии с принципами параллелограмма при вращении второй скобы 4 под определенным углом относительно третьей скобы 6, соединительный элемент 12 вращается под тем же углом вместе с ним, не мешая траектории движения второй скобы 4; при этом соединительный элемент 12 закреплен на третьей скобе 6 с помощью элемента крепления 13, и соединительный элемент 12 обеспечивает эффективную опору для двух открытых концов второй скобы 4 в вертикальном направлении, увеличивая нагрузку и жесткость второй скобы 4 и эффективно снижая влияние деформации, когда вторая скоба 4 имеет большую нагрузку, и в тоже время, уменьшает собственный вес второй скобы 4 по отношению к производственному процессу и уменьшая диаметр второго двигателя 5.
На основе вышеуказанного технического решения, в частности, соединительный элемент 12 содержит первое соединительное звено 121, второе соединительное звено 122 и третье соединительное звено 123, которые шарнирно последовательно соединены; один свободный конец первого соединительного звена 121 шарнирно установлен на одном конце второй скобы 4, один свободный конец третьего соединительного звена 123 шарнирно установлен на другом конце второй скобы 4 так, что соединительный элемент 12 и вторая скоба совместно образуют параллелограмм. Для того чтобы установить в требуемое положение параллелограмм и улучшить его стабильность, средняя часть второго соединительного звена 122 расположена на третьей скобе 6 с помощью элемента крепления 13.
Предпочтительно для того чтобы дать возможность закрепить соединение между соединительным элементом 12 и третьей скобой 6, как изображено на фиг.1, оно дополнительно содержит опорный кронштейн 10, при этом один конец опорного кронштейна 10 закреплен на третьей скобе 6, другой конец снабжен установочным отверстием 11, подогнанным под элемент крепления 13, и второе соединительное звено 122 закреплено на опорном кронштейне 10 с помощью элемента крепления 13.
Для того чтобы своевременно облегчить двигателю регулировку его угла вращения, предпочтительно ось Х первой скобы 2 устанавливается перпендикулярно к оси вращения Y второй скобы 4. Статор первого двигателя 3 закреплен на первой скобе 2, и ротор первого двигателя 3 жестко установлен совместно со второй скобой 4, и первый двигатель 3 непосредственно приводит в движение вторую скобу 4, вынуждая первую скобу 2 вращаться относительно второй скобы 4. Статор второго двигателя 5 закреплен на третьей скобе 6 и ротор второго двигателя 5 жестко установлен совместно со второй скобой 4, и второй двигатель 5 непосредственно приводит в движение вторую скобу 4, вынуждая вторую скобу 4 вращаться относительно третьей скобы 6.
Кроме того, для повышения стабильности во время съемки устройства для ведения съемки 1 центр тяжести первой скобы 2 вместе с устройством для ведения съемки 1 приходится на ось вращения первой скобы 2. Посредством применения механического анализа, когда центр тяжести второй скобы 2 и устройства для ведения съемки 1 приходится на ось вращения Х первой скобы 2, первая скоба 2 вращается под любым углом и не образовывает вращающий момент, т.е. первая скоба 2 не будет дрожать из стороны в сторону за счет момента, что повышает стабильность устройства для ведения съемки 1 во время вращения. Когда беспилотный летательный аппарат работает стабильно, а именно когда нет необходимости запускать двигатель, первая скоба 2 и устройство для ведения съемки 1 также находятся в состоянии динамического баланса.
Подобным образом посредством применения механического анализа было обнаружено, что для того, чтобы повысить стабильность и предотвратить при вращении всего устройства вокруг оси Y от образования вращающего момента, предпочтительно чтобы центр тяжести первой скобы 2, второй скобы 4 и устройства для ведения съемки 1 в целом приходится на ось вращения второй скобы 4, как изображено на фиг.1.
На основании вышеуказанного технического решения предпочтительно платформа, предусмотренная в предлагаемом изобретении, приспособлена для малого беспилотного летательного аппарата для аэросъемки и наблюдения, а первый двигатель 3 и второй двигатель 5 каждый предпочтительно является бесщеточным двигателем постоянного тока. Преимущества использования бесщеточного двигателя постоянного тока в беспилотном летательном аппарате заключаются в том, что (1) электронная связь вместо обычной механической связи обеспечивает надежную производительность, устойчивую износостойкость, низкую частоту сбоев и повышение ресурса эксплуатации приблизительно в шесть раз, чем щеточный двигатель; (2) бесщеточным двигателем постоянного тока является обычный двигатель с малым током без нагрузки; (3) высокоэффективен; (4) малогабаритен.
Кроме того, трансмиссионный блок дополнительно содержит печатную плату, датчик инерции, микропроцессор и сигнальную линию, при этом датчик инерции содержит гироскоп для обнаружения сигнала угловой скорости и акселерометр для обнаружения сигнала ускорения, микропроцессор управляет положительным вращением, обратным вращением и величиной скорости вращения первого двигателя 3 и второго двигателя 5 в соответствии с сигналом угловой скорости и сигналом ускорения. Датчик инерции устанавливается для контроля положения беспилотного летательного аппарата своевременно и динамически, управления положительным и обратным вращениями двигателя быстро и своевременно, с тем, чтобы улучшить стабильность съемки устройства для ведения съемки.
Вариант осуществления 2
В другом варианте осуществления, изображенном на фиг.2-6, настоящее изобретение предусматривает трехосную платформу для использования в беспилотном летательном аппарате, которая содержит раму в сборе, трансмиссионный блок и устройство для ведения съемки 1. Как изображено на фиг.2, рама в сборе содержит первую скобу 2, вторую скобу 4, третью скобу 6 и соединительную раму 8 для размещения внешне. Устройство для ведения съемки 1 закреплено на первой скобе 2. Чтобы допустить вращение устройства для ведения съемки 1 вокруг оси Х (ось вращения первой скобы 2), первая скоба 2 установлена с возможностью вращения совместно со второй скобой 4. Такая вращательная конструкция может достичь подъема или наклона вращения устройства для ведения съемки 1. Для того чтобы приспособиться к наклону влево или вправо беспилотного летательного аппарата на протяжении полета, устройство для ведения съемки 1 вращается вправо или влево соответственно для обеспечения стабильности фотоснимков и видеосъемки. Как изображено на фиг.5 и 6, вторая скоба 4 установлена с возможностью вращения совместно с третьей скобой 6, вращение влево или вправо второй скобы 4 вызывает вращение целиком первой скобы 2 и устройства для ведения съемки 1. Чтобы допустить круговое вращение устройства для ведения съемки 1 для выполнения съемки при вращении в диапазоне 360 градусов, соединительная рама 8 внешне закреплена к вертолету или многовинтовому летательному аппарату, и третья скоба 6 может вращаться вокруг оси Z относительно соединительной рамы 8. Трансмиссионный блок содержит первый двигатель 3, второй двигатель 5 и третий двигатель 7, при этом первый двигатель 3 приводит в движение первую скобу 2 для вращения вокруг ее оси относительно второй скобы 4, второй двигатель 5 приводит в движение вторую скобу 4 для вращения вокруг ее оси вращения относительно третьей скобы 6, и третий двигатель 7 приводит в движение третью скобу 6 для вращения вокруг ее оси вращения Z относительно соединительной рамы 8. В настоящем варианте осуществления изобретения предусмотренным источником питания является двигатель. Использование малогабаритного двигателя имеет следующие преимущества: (1) двигатель непосредственно запускается с низкими затратами энергии, тем самым экономя энергию и осуществляя защиту окружающей среды; (2) двигатель имеет более короткое время отклика и может своевременно и быстро приспосабливаться для адаптирования при различных положениях полета беспилотного летательного аппарата с тем, чтобы улучшить стабильность съемки устройства для ведения съемки. Как изображено на фиг.2, фиг.3 и фиг.4, два свободных конца второй скобы 4 выступают наружу, первая скоба 2 и устройство для ведения съемки 1 установлены интегрально с возможностью вращения между двумя свободными концами; во время вращения второй скобы 4, приводимой в движение вторым двигателем 5, тем более длина двух свободных концов второй скобы 4, чем отдален центр тяжести первой скобы 2 и устройства для ведения съемки 1 от точки положения второй скобы 4 так, что вторая скоба 4 дрожит сильнее и менее стабильно устройство для съемки 1. Для того чтобы уменьшить дрожание второй скобы 4 и увеличить стабильность, как изображено на фиг.2, фиг.3 и фиг.4, платформа дополнительно содержит соединительный элемент 12, два свободных конца которого соответственно установлены с возможностью вращения на двух свободных концах второй скобы 4, соединительный элемент 12 закреплен на третьей скобе 6 с помощью элемента крепления 13. В настоящем изобретении свободные концы соединительного элемента 12 жестко установлены на второй скобе 4 для совместного образования параллелограмма. В соответствии с принципами параллелограмма при вращении второй скобы 4 под определенным углом относительно третьей скобы 6, соединительный элемент 12 вращается под тем же углом наряду с ним, не мешая траектории движения второй скобы 4; при этом соединительный элемент 12 закреплен на третьей скобе 6 с помощью элемента крепления 13, таким образом, обеспечивая поддержку и расположение для двух открытых концов второй скобы 4 и увеличивая стабильность второй скобы 4. Свободные концы соединительного элемента 12 жестко установлены на второй скобе 4 для совместного образования параллелограмма. В соответствии с принципами параллелограмма при вращении второй скобы 4 под определенным углом относительно третьей скобы 6, соединительный элемент 12 вращается под тем же углом наряду с ним, не мешая траектории движения второй скобы 4; между тем соединительный элемент 12 закреплен на третьей скобе 6 с помощью элемента крепления 13, и соединительный элемент 12 обеспечивает эффективную поддержку для двух открытых концов второй скобы 4 в вертикальном направлении, увеличивая нагрузку и жесткость второй скобы 4 и эффективно уменьшает величину деформации, когда вторая скоба 4 имеет большую нагрузку, и при этом снижая собственный вес второй скобе 4 по отношению к производственному процессу и уменьшая диаметр второго двигателя 5.
На основании вышеуказанного технического решения, в частности, как изображено на фиг.2, соединительный элемент 12 содержит первое соединительное звено 121, второе соединительное звено 122 и третье соединительное звено 123, которые жестко последовательно соединены; один свободный конец второго соединительного звена 121 жестко установлен на одном конце второй скобы 4, один свободный конец третьего соединительного звена 123 жестко установлен на другом конце второй скобы 4 так, что соединительный элемент 12 и вторая скоба 4 совместно образуют параллелограмм. Для того чтобы установить в требуемое положение параллелограмм и увеличить его стабильность, центральная часть второго соединительного звена 122 зафиксирована на третьей скобе 6 с помощью элемента крепления 13.
Предпочтительно для того чтобы дать возможность закрепить соединение между соединительным элементом 12 и третьей скобой 6, как изображено на фиг.2, фиг.3 и фиг.4, оно содержит опорный кронштейн 10, один конец опорного кронштейна 10 закреплен на третьей скобе 6, другой конец снабжен установочным отверстием 11, подогнанным под элемент крепления 13, и второе соединительное звено 122 закреплено на опорном кронштейне 10 с помощью элемента крепления 13.
Предпочтительно ось вращения Х первой скобы 2, ось вращения Y второй скобы 4 и ось вращения Z третьей скобы 6 расположены перпендикулярно друг к другу. Как изображено на фиг.3 и фиг.4, статор первого двигателя 3 закреплен на первой скобе 2, и ротор первого двигателя 3 жестко установлен совместно со второй скобой 4, и первый двигатель 3 непосредственно приводит в движение вторую скобу 4, вызывая вращение первой скобы 2 относительно второй скобы 4. Как изображено на фиг.5 и фиг.6, статор второго двигателя 5 закреплен на третьей скобе 6 и ротор второго двигателя 5 жестко закреплен совместно со второй скобой 4, и второй двигатель 5 непосредственно приводит в движение вторую скобу 4, вызывая вращение второй скобы 4 относительно третьей скобы 6. Как изображено на фиг.5 и фиг.6, статор третьего двигателя 7 закреплен на соединительной раме 8, ротор жестко соединен с третьей скобой 6, и третий двигатель 7 непосредственно приводит в движение третью скобу 6, вызывая вращение третьей скобы 6 вокруг оси Z относительно соединительной рамы 8. Установочная рама 9 жестко размещена на соединительной раме 8 для расположения третьего двигателя 7.
Кроме того, для увеличения стабильности на протяжении съемки устройства для ведения съемки 1, центр тяжести первой скобы 2 и устройства для ведения съемки 1 припадает на ось вращения первой скобы 2. Посредством применения механического анализа, когда центр тяжести первой скобы 2 и устройства для ведения съемки 1 приходится на ось вращения Х первой скобы 2, первая скоба 2 вращается на любой угол и не образовывает вращающий момент, т.е. первая скоба 2 не будет дрожать из стороны в сторону из-за момента и, таким образом, увеличивается стабильность устройства для ведения съемки 1 во время вращения. Когда беспилотный летательный аппарат работает стабильно, а именно когда нет необходимости в запуске двигателя, первая скоба 2 и устройство для ведения съемки 1 также находятся в состоянии динамического баланса.
Также при непосредственном применении механического анализа было обнаружено, что для того, чтобы увеличить стабильность и предотвратить при вращении всего устройства вокруг оси Y от образования вращающего момента, предпочтительно центр тяжести первой скобы 2, второй скобы 4 и устройства для ведения съемки 1 в целом находится на оси вращения второй скобы 4, как изображено на фиг.1.
Также для того чтобы повысить стабильность и предотвратить при вращении всего устройства вокруг оси Y от образования вращающего момента центр тяжести первой скобы 2, второй скобы 4, третьей скобы 6 и устройства для ведения съемки 1 в целом приходится на ось вращения Z второй скобы 6, как изображено на фиг.5 и фиг.6.
На основе вышеуказанного технического решения предпочтительно платформа, предусмотренная настоящим изобретением, приспособлена для малого беспилотного летательного аппарата для аэросъемки и наблюдения и, предпочтительно первый двигатель 3 и второй двигатель 5 каждый являются бесщеточным двигателем постоянного тока. Преимущества использования бесщеточного двигателя постоянного тока в беспилотном летательном аппарате заключаются в том, что (1) электронная связь вместо обычной механической связи обеспечивает надежную производительность, устойчивую износостойкость, низкую частоту сбоев и повышение ресурса эксплуатации приблизительно в шесть раз, чем щеточный двигатель; (2) бесщеточным двигателем постоянного тока является обычный двигатель с малым током без нагрузки; (3) высокоэффективен; (4) малогабаритен.
Кроме того, трансмиссионный блок дополнительно содержит печатную плату, датчик инерции, микропроцессор и сигнальную линию, при этом датчик инерции содержит гироскоп для обнаружения сигнала угловой скорости и акселерометр для обнаружения сигнала ускорения, микропроцессор управляет положительным вращением, обратным вращением и величиной скорости вращения первого двигателя 3 и второй двигателя 5 в соответствии с сигналом угловой скорости и сигналом ускорения. Датчик инерции устанавливается для контроля положения беспилотного летательного аппарата своевременно и динамически, и управления положительным и обратным вращениями двигателя быстро и своевременно с тем, чтобы улучшить стабильность съемки устройства для ведения съемки.
Вариант осуществления 3
В дополнительном варианте осуществления, как изображено на фиг.7-фиг.10, настоящее изобретение предусматривает многовинтовой летательный аппарат, который содержит трехосную платформу 100 для использования в беспилотном летательном аппарате, многовинтовую установочную раму 200 и окружное устройство. Многовинтовая установочная рама 200 содержит основание 21, по меньшей мере, три несущих рычага 22, вставленных и зафиксированных на основании 21, элемент несущего винта 23, закрепленный на одном конце несущего рычага 22, множество опорных рам 24, которые установлены проходящими вдоль основания 21 и используются для размещения внешне. Примечательно, что число несущих рычагов 22 не ограничено тремя, как изображено на фигурах, и оно может быть четыре, шесть или восемь. Опорные рычаги 22 могут быть закреплены на основании 21 с помощью вставного соединения, свариванием, резьбовым соединением или заклепкой. Трехосная платформа 100 для использования в беспилотном летательном аппарате жестко установлена на основании 21 с помощью соединительной рамы 8.
Примечательно, что трехосная платформа 100 многовинтового летательного аппарата использует конструкцию трехосной платформы для использования в беспилотном летательном аппарате, предусмотренную в варианте осуществления 2, который не описан здесь детально. Пожалуйста, обратитесь детально к предыдущим изображениям.
Вариант осуществления 4
В варианте осуществления, изображенном на фиг.11, настоящее изобретение предусматривает платформу для использования в беспилотном летательном аппарате. Платформа является двухосной платформой, которая содержит раму в сборе, трансмиссионный блок и устройство для ведения съемки 1. Рама в сборе содержит первую скобу 2, вторую скобу 4, третью скобу 6 и соединительный элемент 12, устройство для ведения съемки закреплено на первой скобе 2, первая скоба 2 установлена с возможностью вращения совместно со второй скобой 4, вторая скоба 4 установлена с возможностью вращения совместно с третьей скобой 6, а соединительный элемент 12 и вторая скоба 4 образуют четырехзвенный соединительный механизм. Трансмиссионный блок содержит первый двигатель 3 и четвертый двигатель 25, при этом первый двигатель 3 непосредственно приводит в движение первую скобу 2 для вращения относительно второй скобы 4. В отличие от Варианта осуществления 1, Варианта осуществления 2 и Варианта осуществления 3, элемент крепления 13 замещен четвертым двигателем 25, который непосредственно приводит в движение соединительный элемент 12, вызывая вращение второй скобы 4 относительно третьей скобы 6, вместо того предложения, что второй двигатель 5 непосредственно приводит в движение четвертую скобу 4 как в Варианте осуществления 1, Варианте осуществления 2 и Варианте осуществления 3. В настоящем изобретении соединительный элемент 12 и вторая скоба 4 образуют четырехзвенный соединительный механизм, четвертый двигатель 25, который непосредственно приводит в движение соединительный элемент 12, вызывая вращение второй скобы 4 относительно третьей скобы 6, соединительный элемент 12 и вторая скоба 4 вращаются под таким же углом не мешая траектории движения второй скобы 4; в тоже время соединительный элемент 12 обеспечивает эффективную поддержку для двух концов второй скобы 4 в вертикальном направлении, увеличивая нагрузку и жесткость второй скобы 4, эффективно уменьшая величину деформации, и уменьшая собственный вес второй скобы 4.
В дополнительном варианте осуществления, изображенном на фиг.12, настоящее изобретение предусматривает трехосную платформу. В отличие от двухосной платформы, как описано на фиг.11, рама платформы для использования в беспилотном летательном аппарате дополнительно содержит соединительную раму 8 для размещения внешне, трансмиссионный блок дополнительно содержит третий двигатель 7; третий двигатель 7 приводит в движение третью скобу 6 для вращения относительно соединительной рамы 8. Чтобы допустить круговое вращение устройства для ведения съемки 1 для выполнения съемки при вращении в диапазоне 360 градусов, соединительная рама 8 закреплена внешне к вертолету или многовинтовому летательному аппарату, и третья скоба 6 может вращаться вокруг оси Z относительно соединительной рамы 8.
В дополнительном варианте осуществления, как изображено на фиг.13, настоящее изобретение предусматривает двухосную платформу для использования в беспилотном летательном аппарате. В отличие от платформы, описанной на фиг.11, трансмиссионный блок платформы для использования в беспилотном летательном аппарате содержит второй двигатель 5, который непосредственно приводит в движение вторую скобу 4 для вращения относительно третьей скобы 6. Второй двигатель 5 может служить в качестве вспомогательного источника питания и приводить в движение вторую скобу 4 совместно с четвертым двигателем 25. Поскольку соединительный элемент 12 и вторая скоба 4 образуют четырехзвенный соединительный механизм, второй двигатель 5 и четвертый двигатель 25 используются совместно для синхронного приведения в движение вторую скобу 4 для вращения. Может быть понятно, что второй двигатель 5 и четвертый двигатель 25 могут независимо приводить в движение вторую скобу 5 для вращения.
В дополнительном варианте осуществления, как изображено на фиг.14, настоящее изобретение предусматривает трехосную платформу для использования в беспилотном летательном аппарате. В отличие от платформы, описанной на фиг.13, рама платформы для использования в беспилотном летательном аппарате дополнительно содержит соединительную раму 8 для размещения внешне, трансмиссионный блок дополнительно содержит третий двигатель 7; третий двигатель 7 приводит в движение третью скобу 6 для вращения относительно соединительной рамы 8. Чтобы допустить круговое вращение устройства для ведения съемки 1, выполняя съемку при вращении в диапазоне 360 градусов, соединительная рама 8 закреплена внешне к вертолету или многовинтовому летательному аппарату, и третья скоба 6 может вращаться вокруг оси Z относительно соединительной рамы 8.
В платформе Варианта осуществления 4 настоящего изобретения, соединительный элемент 12 и вторая скоба 4 образуют четырехзвенный соединительный механизм, четвертый двигатель 25 непосредственно приводит в движение соединительный элемент 12 вызывая вращение второй скобы 4 относительно третьей скобы 6, соединительный элемент 12 и вторая скоба 4 вращаются под таким же углом не мешая траектории движения второй скобы 4; при этом соединительный элемент 12 обеспечивает эффективную поддержку для двух концов второй скобы 4 в вертикальном направлении, увеличивая нагрузку и жесткость второй скобы 4, эффективно уменьшает величину деформации и уменьшает собственный вес второй скобы 4. При этом двигатель в качестве источника питания напрямую соединен со сборным рамным механизмом платформы, тем самым потребляя меньше энергии и экономя электрическую энергию; в тоже время, двигатель, включаясь, может достичь бесконечно переменного регулирования, двигатель имеет краткосрочное время действия отклика и может быстро запускаться, останавливаться или изменить величину скорости вращения, своевременно адаптируясь к различным положениям полета беспилотного летательного аппарата, тем самым увеличивая стабильность съемки устройства для ведения съемки.
Выше описаны только предпочтительные варианты осуществления настоящего изобретения со ссылкой на фигуры. Объем защиты настоящего изобретения не ограничивается вышеописанными конкретными вариантами осуществления. Описанные выше конкретные варианты осуществления не ограничены только проиллюстрированными. Как предложено в настоящем изобретении, специалисты обычной классификации в данной области техники, не отходя от сущности настоящего изобретения и объема, определенного прилагаемой формулы изобретения, могут разрабатывать различные формы, все из которых попадают в объем настоящего изобретения.
Перечень элементов
100 - платформа
200 - многовинтовая установочная рама
1 - устройство для ведения съемки
2 - первая скоба
3 - первый двигатель
4 - вторая скоба
5 - второй двигатель
6 - третья скоба
7 - третий двигатель
8 - соединительная рама
9 - установочная рама
10 - опорный кронштейн
11 - установочное отверстие
12 - соединительный элемент
121 - первое соединительное звено
122 - второе соединительное звено
123 - третье соединительное звено
13 - элемент крепления
21 - основание
22 - несущий рычаг
23 - элемент несущего винта
24 - опорная рама
25 - четвертый двигатель.
Технологии для детектирования видеокопии
Способ промышленного получения азотзамещенного амино-5,6,7,8-тетрагидронафтола
Платформа для использования в малоразмерных беспилотных летательных аппаратах
Носимое устройство и способ его изготовления
Технологии для детектирования видеокопии
Способ промышленного получения азотзамещенного амино-5,6,7,8-тетрагидронафтола
Платформа для использования в малоразмерных беспилотных летательных аппаратах
Носимое устройство и способ его изготовления
Суммарные экстракты из andrographis paniculata
Катализатор риформинга нафты и способ его получения
Фармацевтические композиции микросфер гозерелина с пролонгированным высвобождением
Способ и устройство для прогнозирования изменения скорости нарастания обводненности в нефтяном пласте с водонапорным режимом
Преформа оптического волокна для изготовления одномодового оптического волокна и способ изготовления одномодового оптического волокна
Катализатор из чистой фазы е/е' карбида железа для реакции синтеза фишера-тропша, способ его приготовления и способ синтеза фишера-тропша

