Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ГИДРОЛОКАТОРОМ
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано для построения систем обнаружения сигнала гидролокатора и, в частности, повышения точности измерения дистанции при использовании зондирующих сигналов.
Известны способы измерения дистанции, основанные на приеме эхосигнала гидролокатора на фоне шумов, преобразовании акустического сигнала в электрический гидроакустической антенной, определении энергетического спектра электрического процесса, представляющего собой смесь электрического сигнала и нормальной стационарной шумовой помехи, изложенные, например, в работе Евтютова Е.С. и Митько В.Б. "Примеры инженерных расчетов в гидроакустике". Л.: Судостроение, 1981, с. 77. Способ содержит спектральный анализ процесса, детектирование спектральных составляющих, интегрирование огибающей и обнаружение сигнала при сравнении с порогом. В момент превышения выбранного порога определяется время задержки эхосигнала и по нему высчитывается дистанция до цели с использованием оценки скорости звука.
Аналогичный способ обнаружения эхосигнала и измерения дистанции изложен в книге B.C. Бурдика "Анализ гидроакустических систем". Л.: Судостроение, 1988, стр. 347 и содержит многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом. По каналу с максимальной амплитудой сигнала по частоте определяется смещение спектра, которое пропорционально радиальной скорости цели, а по моменту превышения выбранного порога определяется задержка эхосигнала и дистанция до цели с использованием скорости звука.
Разрешающая способность зондирующего сигнала определяется шириной функции неопределенности по измеряемому параметру. Чем больше длительность сигнала, тем хуже разрешающая способность по дальности. (Д.Е. Вакман. Сложные сигналы и принцип неопределенности в радиолокации. М.: Сов. радио, 1965, стр. 111).
Подобный способ приведен в "Справочнике по гидроакустике". Л.: Судостроение, 1988, стр. 27. При этом под спектральным анализом понимают, как правило, полосовую фильтрацию, выделяющую основную энергию электрического процесса. При использовании цифровой техники в качестве спектрального анализа применяют процедуры быстрого преобразования Фурье (БПФ), которые обеспечивают выделение и измерение энергетического спектра шумового электрического процесса. "Применение цифровой обработки сигналов". М.: Мир, 1990, стр. 296.
Перечисленные способы имеют точность измерения дистанции, определяемую длительностью зондирующего сигнала. Как правило, при определении дистанции используется средняя скорость звука или скорость звука на горизонте излучения. Требования, предъявляемые к гидроакустическим средствам, заключаются в обеспечении их высокой эффективности, что достигается путем измерения в данной обстановке наиболее достоверной дальности обнаружения. Главным препятствием при его выполнении является большая изменчивость параметров окружающей среды, к которым относится и оценка скорости звука, которая используется для определения дальности. Сигнал, распространяясь в слоистой среде, претерпевает воздействия различных факторов и на разных уровнях среды распространяется с различной скоростью. Поэтому для правильной оценки дальности до цели необходимо знать реальную скорость распространения гидроакустического сигнала по трассе, по которой прошел зондирующий сигнал и отраженный сигнал (В.Н. Матвиенко, Ю.Ф. Тарасюк. «Дальность действия гидроакустических средств». Л.: Судостроение, 1981, стр. 154). Если используется сигнал короткой длительности, предположим, 1 мс, то разрешающая способность этого сигнала составит 1,5 метра, и казалось бы, что и точность измерения дистанции будет определяться этой разрешающей способностью. Предположим, что время задержки этого сигнала составит 1 секунду, тогда дистанция будет равна 750 метров при скорости звука 1500 м/сек. Если реальная скорость звука по трассе распространения 1450 м/сек, то реальная дистанция будет 725 метров, то есть ошибка составит 25 метров при потенциальной разрешающей способности зондирующего сигнала 1,5 метра.
Задачей изобретения является повышение точности измерения дистанции за счет измерения скорости звука при распространении зондирующего сигнала в реальных условиях по трассе.
Для решения поставленной задачи в известный способ измерения дистанции, содержащий излучение зондирующего сигнала, прием эхосигнала, измерение времени задержки между излучением зондирующего сигнала tиз1 и временем приема отраженного эхосигнала tпр1, определение дистанции по формуле Д=0,5C(tиз1-tпр1), где С - скорость звука, введены новые операции, а именно: измеряют собственную скорость движения V, излучают второй зондирующий сигнал через фиксированный интервал времени Т, измеряют время излучения второго зондирующего сигнала tиз2, измеряют время приема второго эхосигнала tпр2, определяют скорость звука при распространении по трассе по формуле C=2VT/{(tиз1-tпр1)-(tиз2-tnp2)}, а оценку измеренной дистанции Д производят с использованием измеренной скорости звука.
Поясним достижение указанного результата.
Все измерения в гидроакустике производятся с использованием оценки скорости звука. В.Н. Матвиенко, Ю.Ф. Тарасюк. «Дальность действия гидроакустических средств». Л.: Судостроение, 1981) С этой целью используются известные приборы, которые измеряют зависимость скорости звука от глубины и в соответствии с полученными результатами рассчитывают распространение сигнала по трассе. Здесь надо учитывать то обстоятельство, что измерение происходит в одной конкретной точке по глубине, и считается, что такое же распределение скорости звука будет по всей трассе распространения, что не всегда соответствует действительности. Практически никто не проводил измерение скорости звука по трассе ввиду сложности работ и трудности их сопоставления.
Существуют прямые и косвенные методы определения скорости распространения звука в воде. Косвенные методы предполагают предварительное измерение температуры воды и солености воды и дальнейший расчет по известным номограммам скорости звука. (В.А. Комляков. «Корабельные средства измерения скорости звука и моделирования акустических полей в океане». СПб.: Наука, 2003, стр. 50-87). Существуют прямые методы измерения скорости звука при использовании конкретных приборов, которые измеряют скорость звука на глубине нахождения с использованием интерферометрических методов, фазовых методов, импульсных методов и частотных методов. Эти приборы, как правило, устанавливаются на борту судна и измеряют скорость звука при погружении до определенной глубины. Для расчетов траекторий распространения сигналов используется таблицы, снятые для всех глубин и для всех морей и океанов, в которых указаны значения скоростей звука на различных глубинах. Как правило, эти значения являются устаревшими и не всегда соответствуют решаемым задачам (стр. 98, там же). Есть разовые гидрофизические зонды, которые погружаются до дна и по мере погружения передают информацию о значении скорости звука на конкретной глубине. Этот способ является дорогим и затратным и не всегда может быть использован при решении конкретных задач.
Существо предлагаемого способа измерения дистанции заключается в том, что предварительно измеряют скорость звука по трассе. Для станций освещения ближней обстановки характерным является режим работы с непрерывным излучением. Для измерения скорости звука может быть выбран любой малоподвижный объект. Рассмотрим измерения дистанции для двух последовательных зондирующих сигналов. Предположим, что дистанция до объекта Д1. Если зондирующий сигнал излучается в момент времени tиз1 и время приема при распространения сигнала до объекта и обратно равно tпр1, тο оценка дистанции Д будет равна Д1=0,5C(tиз1-tпр1), где С - скорость звука. Если гидролокатор движется прямолинейно и равномерно со скоростью V и излучает зондирующие сигналы через равные известные промежутки времени Т, то за время между излучениями будет пройдено расстояние д=VT. Тогда оценка дистанции, полученная по второму зондирующему сигналу, излученному в момент времени tиз2 и принятому в момент времени tпр2, будет равна Д2=0,5C(tиз2-tпр2). Если учесть, что Д2=Д1-VT, можем написать систему уравнений
Д1=0,5C(tиз1-tпр1);
Д1-VT=0,5C(tиз2-tпр2) или Д1=0,5C(tиз2-tпр2)+VT, откуда можно получить оценку скорости распространения звука Сизм=2VT/{(tиз1-tпр1)-(tиз2-tпр2)}.
Тогда Д1=0,5Cизм(tиз1-tпр1)=2VT (tиз1-tпр1)/{(tиз1-tпр1)-(tиз2-tпр2)}.
В дальнейшем при каждой оценке дистанции следует использовать измеренную оценку скорости звука.
Блок-схема устройства, реализующего предлагаемый способ, представлена на фиг. 1.
Устройство (фиг. 1) содержит гидролокатор 1, который через блок 2 измерения времен задержек, через блок 3 памяти, через блок 5 измерения скорости звука, через блок 6 измерения дистанции соединен с индикатором 7. Выход блока 4 измерения собственной скорости соединен со вторым входом блока 5 определения скорости звука, второй выход гидролокатора 1 соединен со вторым входом индикатора 7, а второй выход блока 2 соединен со вторым входом блока 6.
Гидролокатор 1 работает в своем штатном режиме и излучает зондирующие сигналы через фиксированные, известные интервалы времени Т. Гидролокатор является известным устройством, которое широко используется в современной гидроакустической технике (А.Н. Яковлев, Г.П. Каблов. «Гидролокаторы ближнего действия». Л.: Судостроение, 1983). Гидролокатор принимает отраженные эхосигналы своей стандартной аппаратурой, передает в реальном масштабе времени временные реализации на индикатор 7 для представления оператору и передает измеренные оценки в блок 2 измерения времени задержек (tиз1-tпр1) между временем tиз1 излучения первого зондирующего сигнала и временем приема первого эхосигнала tпр1. Измеренная разность времени передается в блок памяти 3. При излучении второго зондирующего сигнала разность (tиз2-tпр2) также из блока 2 предается в блок 3, откуда эти разности, а также оценка времени интервала между посылками Τ поступают в блок 5, куда из блока 4 передается оценка собственной скорости движения, где определяется скорость звука по формуле Сизм=2VT/{(tиз1-tпр1)-(tиз2-tпр2)}. Полученная по двум последовательным измерениям оценка скорости звука Сизм передается в блок 6 определения дистанции, на второй вход которого поступает сигнал из блока 2 оценки времен задержек между излученными сигналами и принятыми эхосигналами по выбранной цели. В этом блоке по формуле Д1=0,5Cизм(tиз1-tпр1) производится вычисление дистанции и передача оценки дистанции на индикатор для отображения оператору. Достаточно подробно принципы работы гидролокаторов рассмотрены в отечественной литературе (А.В. Богородский, Д.Б. Островский. «Гидроакустические навигационные и поисково-обследовательские средства». СПб.: Изд. ЛЭТИ, 2009, с. 116-122).
Гидролокатор 1 является известным устройством, которое может быть реализовано по схеме одноканального цифрового обнаружителя (Стр. 107, А.Н. Яковлев, Г.П. Кабаков. «Гидролокаторы ближнего действия»). Блок 2 измерения времени задержки, блок 3 памяти и блок 6 определения скорости звука по трассе могут быть реализованы с использованием стандартных процедур цифровой вычислительной техники программным образом на любых вычислительных средствах. Все блоки, используемые для определения скорости звука, могут быть выполнены в тех же спецпроцессорах, на которых реализуется работа приемных трактов современных гидролокационных станций. Это стандартные спецпроцессоры, которые работают по разработанным программам и жесткой логике управления при поступлении исходной информации. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника». СПб.: Наука, 2004, с. 281-289). Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко. Цифровая обработка сигналов. СПб.: БХВ - Петербург, 2011). Гидроакустический измеритель собственной скорости движения блок 4 является известным устройством, которые выпускаются серийно и устанавливаются на всех современных судах (А.В. Богородский, Д.Б. Островский. «Гидроакустические навигационные и поисково-обследовательские средства». СПб.: Изд. ЛЭТИ, 2009, стр. 40-81). Достаточно высокая точность интервалов времени между излучениями может быть обеспечена современными методами, и она составляет величину порядка 1 мс. Точность измерения скорости движения современными измерителями составляет величину меньше 0,01 м/с (А.В. Богородский, Д.Б. Островский. «Гидроакустические навигационные и поисково-обследовательские средства». СПб.: Изд. ЛЭТИ, 2009, стр. 48).
Все это обеспечит достаточно высокую точность измерения скорости звука и позволит считать поставленную задачу повышения точности измерения дистанции выполненной.
Способ измерения дистанции гидролокатором, содержащий излучение зондирующего сигнала, прием эхосигнала, измерение времени задержки между излучением зондирующего сигнала t и приемом отраженного эхосигнала t, определение дистанции по формуле Д=0,5C(t-t), где С - скорость звука, отличающийся тем, что измеряют собственную скорость движения V носителя гидролокатора, излучают второй зондирующий сигнал через интервал времени Т, измеряют время излучения второго зондирующего сигнала t, измеряют время приема второго эхосигнала t, определяют скорость звука при распространении по трассе по формуле C=2VT/{(t-t)-(t-t)}, а оценку измеренной дистанции Д производят с использованием измеренной скорости звука.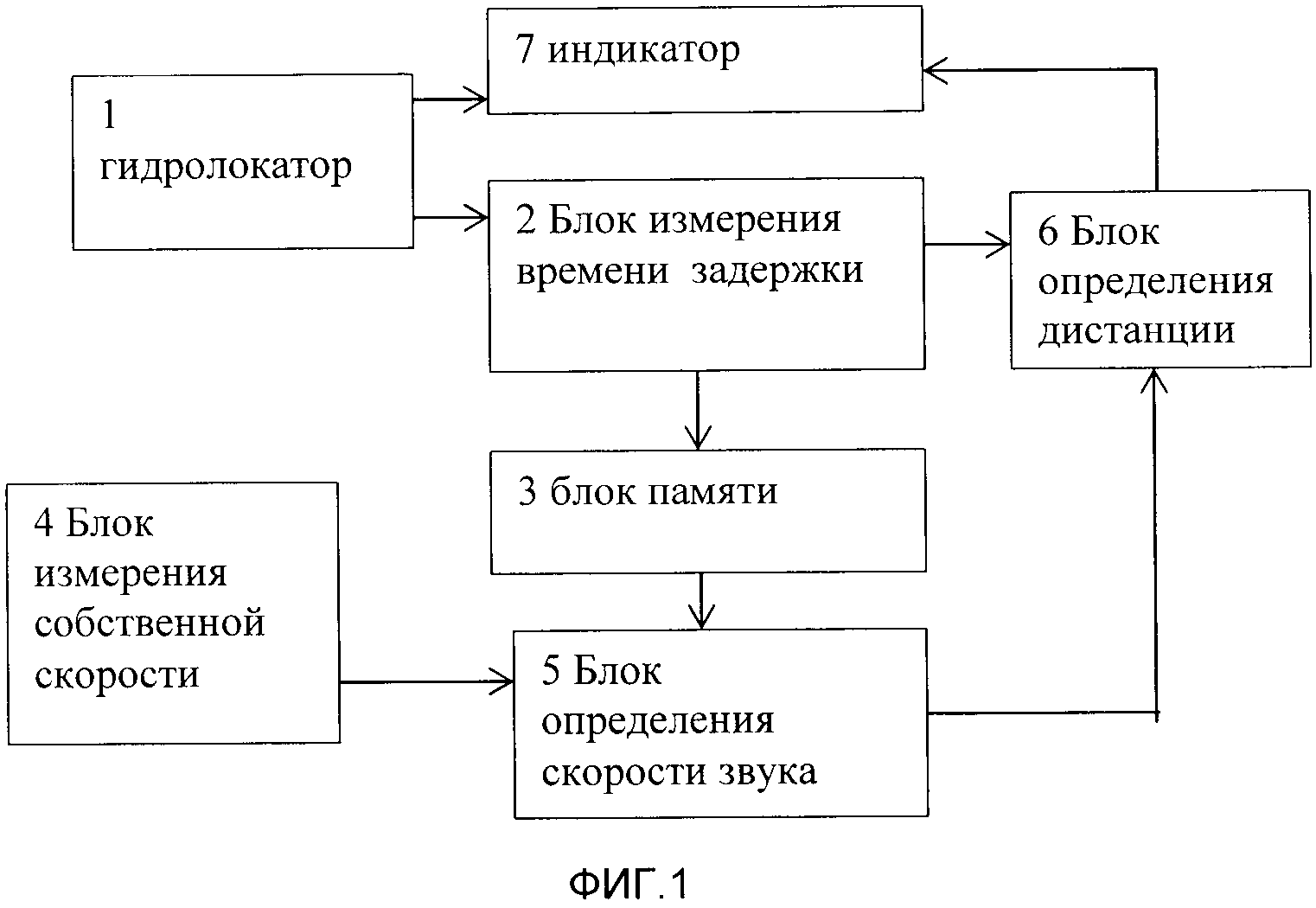
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ определения глубины погружения объекта
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ определения глубины погружения объекта

