Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛОКОМОТИВОВ ПРИ МАНЕВРОВОЙ РАБОТЕ
Вид РИД
Изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах управления движением локомотивов при маневровой работе на станции.
Известна система автоматического управления локомотивом при маневровой работе, реализующая способ управления движением локомотива при маневровой работе, включающий передачу на борт локомотива маршрутного задания, несущего информацию о данном маршруте, контроль и реализацию маршрута движения локомотива посредством обмена информацией между станционным и бортовым комплексами оборудования (RU 2422315 C1, B61L 3/20, 27.06.2011).
Известный способ управления движением локомотива при маневровой работе позволяет повысить производительность системы за счет размыкания неиспользованных участков маршрутов и анализа дополнительных зависимостей между параметрами движения состава и навигационной координатой, позволяющих определить точки остановки вагонов.
Однако в известном способе не предусмотрено задание маршрута за стрелку. Кроме того, способ предполагает дублирование канала АЛС (кодирование по рельсовым цепям) и радиоканала, что нецелесообразно и невозможно при движении вагонами вперед при маневрах.
Наиболее близким аналогом является способ обеспечения безопасности движения поезда, маневрового состава или одиночного локомотива по станции и на подходе к ней, в котором управление движением локомотива при маневровой работе осуществляется путем задания маршрута, передачи его с управляющей информацией на локомотив, реализации и контроля маршрута следования (RU 2352487 C1, B61L 3/12, 27/00).
В известном способе для станционного и локомотивных комплексов оборудования формируют единую электронную базу данных всех возможных маршрутов движения по станции с указанием координат значимых железнодорожных объектов по каждому маршруту и с цифровой кодировкой каждого маршрута. Одновременно с открытием разрешающего сигнала в составе управляющей цифровой информации на локомотив передают код заданного маршрута и информацию о факторах, влияющих на условия движения по заданному маршруту, о занятости прилегающих к маршруту путей и о готовности других маршрутов. На локомотиве и станции формируют траекторию движения по заданному маршруту в соответствии с кодом маршрута и факторами, влияющими на условия движения по нему с возможностью визуализации машинисту заданной траектории движения и переданной на локомотив информации. При этом обеспечивают автоматический контроль безопасной реализации заданной траектории движения по маршруту посредством одновременного автоматического обмена цифровой информацией между локомотивом и станцией об изменениях координаты, скорости и о факторах, влияющих на условия движения по маршруту, в том числе о возникновении любых нештатных ситуаций.
При этом работа микропроцессорной централизации осуществляется только в штатных режимах, т.е. по установленным и замкнутым маршрутам с открытием сигналов, что снижает эффективность маневровой работы из-за недостатков осигнализования станции; например, удлинение маршрута из-за отсутствия попутного светофора между изолированными секциями.
Наличие идентичных баз данных на станции и всех локомотивах, участвующих в маневровой работе, существенно затрудняет процесс ее актуализации, и, по существу, закрепляет маневровые локомотивы за определенной станцией, что практически никогда не выполняется.
Недостатком известного способа является также нарушения безопасности маневровых работ по причине «человеческого фактора», т.к контроль за реализацией маршрута возлагается на дежурных по станции. Кроме того, наличие на табло машиниста графического интерфейса со схемой станции отвлекает машиниста от управления локомотивом и наблюдения за маршрутом, что является угрозой безопасности движения.
Технический результат предлагаемого изобретения заключается в уменьшении элементарного маршрута до размеров изолированного участка, что позволит повысить эффективность и безопасность управления движением локомотивов при маневровой работе на станции при снижении капиталоемкости.
Это достигается тем, что способ управления движением локомотивов при маневровой работе заключается в том, что аппаратно-программный комплекс станционного оборудования в режиме реального времени с помощью устройств микропроцессорной централизации осуществляет мониторинг объектов, влияющих на условия движения на станции, аппаратно-программный комплекс бортового оборудования каждого маневрового локомотива на основе данных локомотивных приемников спутниковой навигации с учетом поправки станционной дифференциальной станции определяет координаты его местоположения и передает их на аппаратно-программный комплекс станционного оборудования, который по результатам мониторинга и данных о местоположении маневровых локомотивов формирует динамическую модель размещения подвижных единиц на станции путем фиксирования в режиме реального времени на цифровой модели путевого развития станции, содержащей нормативные данные о станции с описанием координат и параметров входящих в нее объектов, влияющих на условия движения, состояние участков и стрелок, местоположение локомотивов на путях станции согласно их координатам, а также состояние «виртуальных сигналов» для каждого изолирующего стыка в четном и нечетном направлении, предусмотренных конфигурацией микропроцессорной централизации для задания начала и окончания маршрута, устанавливает соответствие между маршрутами, задаваемыми микропроцессорной централизацией, и локомотивами, участвующими в маневровом процессе, на основе динамической модели определяет для каждого локомотива зоны допустимого перемещения в четном и нечетном направлениях, с учетом которых формирует телеграмму, содержащую маршрутное задание, включающее наименование границ маршрута в четном и нечетном направлениях, описание всех элементов маршрута и значения допустимых скоростей перемещения по каждому, а также команды дежурного по станции, задающие условия движения, и передает ее по радиоканалу передачи данных на аппаратно-программный комплекс бортового оборудования локомотива, который на основании полученных данных определяет параметры маршрута и текущую величину допустимой скорости движения, отображает их на мониторе машиниста, а также рассчитывает траекторию движения с учетом положения локомотива в маневровом составе, при этом реализацию и контроль траектории движения маневрового локомотива или состава по заданному маршруту обеспечивают посредством обмена информацией между аппаратно-программными комплексами бортового и станционного оборудования об изменениях координаты, скорости и о факторах, влияющих на условия движения по маршруту.
Для визуализации траектории движения маневрового состава по маршруту в режиме реального времени динамическую модель размещения подвижных единиц на станции отображают на автоматизированных рабочих местах дежурного по станции и маневрового диспетчера, включая параметры маршрута и скоростного режима движения маневровых локомотивов и составов.
При реализации траектории движения локомотива по маршруту его аппаратно-программный комплекс бортового оборудования осуществляет сравнение допустимых параметров движения локомотива на каждом изолированном участке заданного маршрута с его фактическими параметрами движения, а при контроле - аппаратно-программный комплекс станционного оборудования осуществляет оценку пути, пройденного локомотивом, и его скорости, отслеживает моменты занятия и освобождения изолированных участков маршрута и определяет изменение координаты локомотива или маневрового состава на динамической модели.
Значение текущей величины допустимой скорости движения аппаратно-программный комплекс бортового оборудования локомотива определяет как наименьшее значение технологических скоростей, задаваемых для изолированных участков, занимаемых в текущий момент времени маневровым составом.
При движении маневрового состава локомотивом вперед траекторию его движения аппаратно-программный комплекс бортового оборудования рассчитывает на участке между координатой местоположения локомотива и координатой конца маршрута с учетом ограничения по скорости на изолированных участках, входящих в маршрут, а при задании маршрута на занятый путь - между координатой местоположения локомотива и координатой местоположения вагона, стоящего на его пути.
При движении маневрового состава вагонами вперед траекторию движения локомотива его движения аппаратно-программный комплекс бортового оборудования рассчитывает на участке, между координатой местоположения локомотива, увеличенной на длину маневрового состава, и координатой конца маршрута, а при задании маршрута на занятый путь - между координатой локомотива, увеличенной на длину маневрового состава, и координатой головы местоположения вагонов, стоящих на данном пути, при этом длину маневрового состава определяет аппаратно-программный комплекс станционного оборудования как расстояние между координатой локомотива и координатой изолирующего стыка первого участка по ходу движения маневрового состава в момент его занятия и по радиоканалу передает информацию о ней на аппаратно-программный комплекс бортового оборудования локомотива маневрового состава.
Предлагаемый способ реализуется системой управления движением локомотивов при маневровой работе.
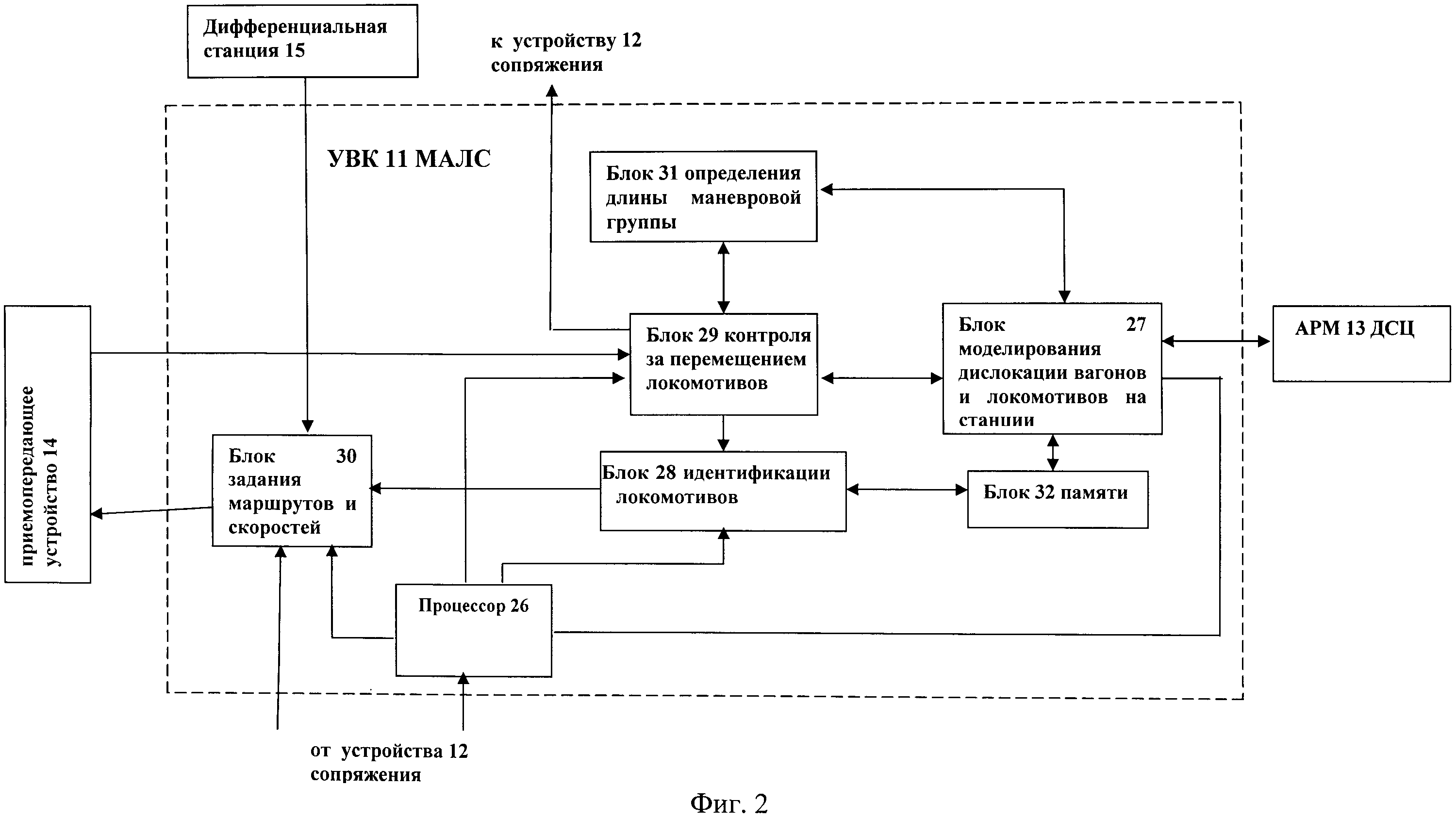
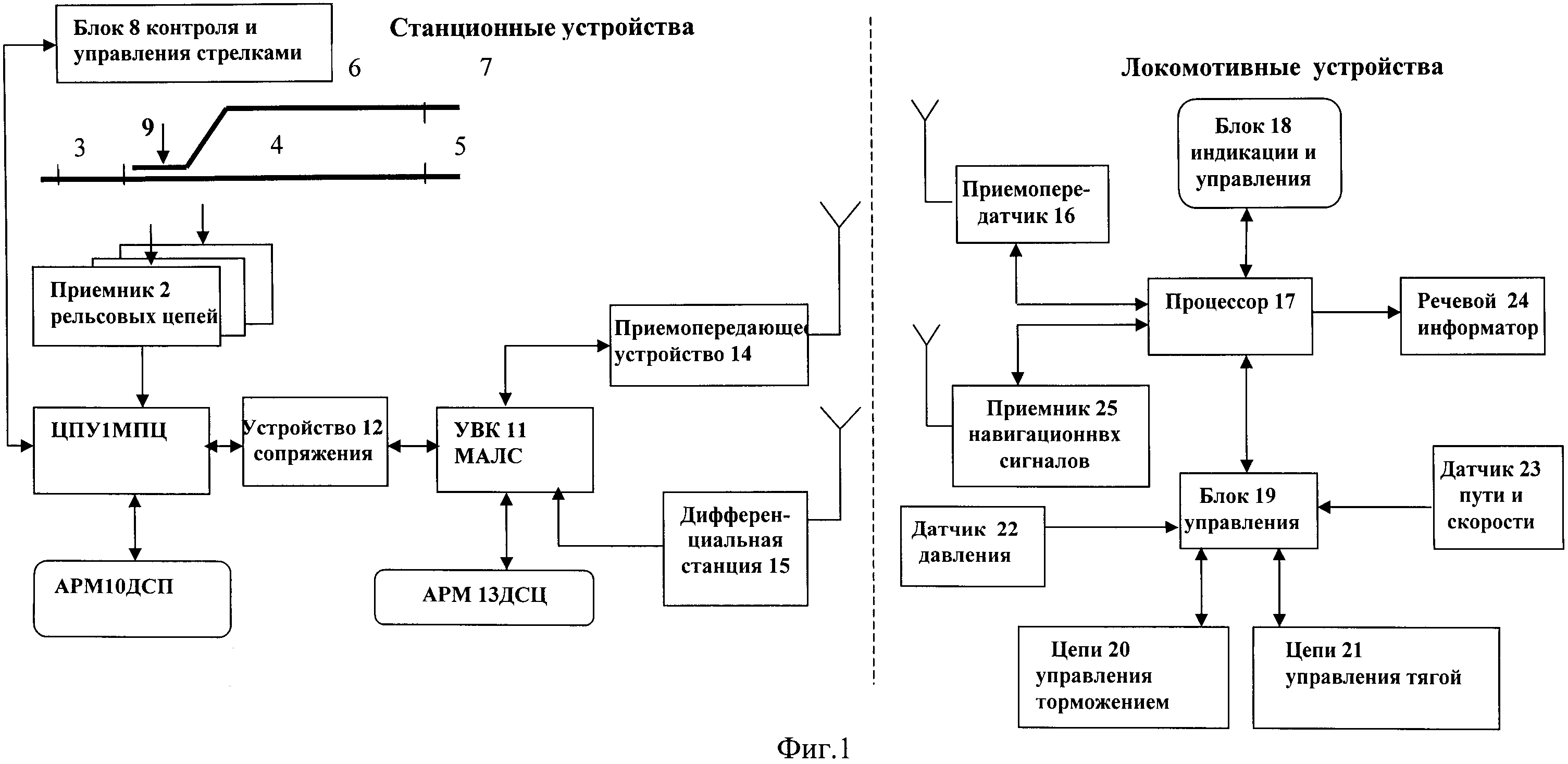
На фиг. 1 представлена структурная схема системы управления движением локомотивов при маневровой работе, реализующая предлагаемый способ. На фиг. 2 - структурная схема управляющего вычислительного комплекса маневровой автоматической локомотивной сигнализации.
Система управления движением локомотивов при маневровой работе включает установленные на станции центральное процессорное устройство 1 микропроцессорной централизации (ЦПУ1МПЦ), входы которого подключены к выходам приемников 2 сигналов рельсовых цепей изолированных участков 3, 4, 5, 6 и 7, первые входы/выходы - к выходам/входам блоков 8 контроля и управления стрелками 9, а вторые входы/выходы подключены к выходам/входам аппаратно-программного устройства автоматизированного рабочего места 10 дежурного по станции (АРМ10ДСП), аппаратно-программный комплекс станционного оборудования, включающий управляющий вычислительный комплекс 11 маневровой автоматической локомотивной сигнализации (УВК11МАЛС), первый вход/выход которого соединен через устройство 12 сопряжения с третьим выходом/входом ЦПУ1МПЦ, второй вход/выход - с входом/выходом аппаратно-программного устройства автоматизированного рабочего места 13 маневрового диспетчера (АРМ13ДСЦ), третий вход/выход - с выходом/входом станционного приемопередающего устройства 14, а вход УВК11МАЛС соединен с выходом стационарной дифференциальной станции 15 спутниковой навигационной системы, установленной на территории станции.
Система содержит также установленные на борту каждого маневрового локомотива аппаратно-программные комплексы бортового оборудования, включающие приемопередатчик 16, процессор 17, блок 18 индикации и управления, блок 19 управления, входами/выходами подключенный к цепям 20 и 21 управления торможением и тягой локомотива, а входами - к выходам датчика 22 давления в тормозных цилиндрах, датчика 23 пути и скорости, речевой информатор 24 и приемник 25 навигационных сигналов спутниковой навигационной системы.
При этом приемник 25 навигационных сигналов подключен входом/выходом к выходу/входу процессора 17, первый вход/выход которого соединен с выходом/входом приемопередатчика 16, второй вход/выход - с другим выходом/входом блока 19 управления, третий вход/выход - с выходом/входом блока 18 индикации и управления, выполненного в виде рабочего экрана машиниста с элементами управления (на чертеже не показаны). Речевой информатор 24 подключен к соответствующему выходу процессора 17.
Цепи 21 управления тягой включают цепи управления контактором возбуждения локомотива, реле управления позициями дизеля и цепи управления током независимой обмотки генератора возбуждения локомотива (на чертеже не показаны). Цепи 20 управления торможением включают цепи управления экстренным, служебным и прямодействующим торможением (на чертеже не показаны).
Управляющий вычислительный комплекс 11 маневровой автоматической локомотивной сигнализации содержит процессор 26, выходами подключенный к входам блока 27 моделирования дислокации вагонов и локомотивов на станции, блока 28 идентификации локомотива, блока 29 контроля за перемещением маневрового локомотива или состава и блока 30 задания маршрутов и скоростей, соответствующие входы последнего из которых соединены с выходами блока 28 идентификации локомотива и дифференциальной станции 15, а выход - с входом приемопередающего устройства 14, подключенного выходом к соответствующему входу блока 29 контроля за перемещением маневрового локомотива или состава, первый выход которого подключен к блоку 28 идентификации локомотива, блок 31 определения длины маневровой группы, включенный между входами/выходами блока 29 контроля за перемещением маневрового локомотива или состава и блока 27 моделирования дислокации вагонов и локомотивов на станции, блок 32 памяти, включающий цифровую модель путевого развития станции, первый вход/выход которого подключен к выходу/входу блока 28 идентификации локомотива, а второй вход/выход - ко второму выходу/входу блока 27 моделирования дислокации вагонов и локомотивов на станции, соединенного третьим выходом/входом со вторым входом/выходом блока 29 контроля за перемещением маневрового локомотива или состава, а четвертым входом/выходом - с выходом/входом аппаратно-программного устройства АРМ13ДСЦ.
Цифровая модель станции содержит план ее путевого развития с описанием координат и параметров входящих в нее объектов, влияющих на условия движения, а именно изолированных участков, стрелок и их предельных столбиков, станционных устройств заграждения и закрепления.
ЦПУ1МПЦ выходом через устройство 12 сопряжения соединено соответственно с входом процессора 26, а входом - с выходом блока 29.
Приемопередатчик 16 аппаратно-программного комплекса бортового оборудования каждого локомотива связан по цифровому радиоканалу со станционным приемопередающим устройством 14.
Система управления движением локомотивов при маневровой работе, реализующая предлагаемый способ, функционирует следующим образом.
Для маневрового передвижения дежурный по станции может задать маршрут двух типов: до стыка, определяя изолированные участки, замыкаемые в маршруте или за стрелку.
В предлагаемом способе процедура замыкания маршрута включает выполняемые центральным процессорным устройством 1 микропроцессорной централизацией в автоматическом режиме следующие стандартные операции: контроль свободности участков на маршруте, исключение враждебных маршрутов, установка стрелок по маршруту, замыкание стрелок в маршруте. При этом вместо операции «открытие сигналов» используют операцию открытие «виртуальных сигналов».
«Виртуальные» сигналы предусмотрены конфигурацией микропроцессорной централизации для каждого изолирующего стыка в четном и нечетном направлении и используются для задания начала или окончания маршрута. Таким образом, любой участок может стать границей маршрута, что позволяет минимизировать длину маршрута и время выполнения операции. Кроме того, исключение оборудования напольных сигналов и кабельной сети позволяет снизить капиталоемкость и трудоемкость обслуживания системы микропроцессорной централизации.
Для каждого изолирующего стыка состояние «виртуальных сигналов» соответствующим образом визуально отображают на экранах мониторов аппаратно-программных устройств АРМ10ДСП и АРМ13ДСЦ.
При задании маршрута за стрелку количество изолированных участков, замыкаемых в маршруте, определяется длиной маневрового состава по данным УВК11МАЛС так, чтобы суммарная длина замыкаемых участков за стрелкой была не меньше длины маневрового состава.
Мониторинг объектов, влияющих на условия движения при маневровой работе, осуществляют с помощью устройств системы микропроцессорной централизации.
В режиме реального времени ЦПУ1МПЦ циклически с заданной периодичностью осуществляет опрос приемников 2 сигналов рельсовых цепей и блоков 8 контроля и управления стрелками 9 и по результатам опроса определяет текущее состояние изолированных участков 3, 4, 5, 6 и 7 - свободен/занят и стрелок 9 - в положении «плюс» или в положении «минус», есть/нет контроль, а также внутри объектов МПЦ - участок замкнут в маршруте или разомкнут, состояние виртуальных сигналов (открыт/закрыт).
Данные о текущем состоянии изолированных участков, стрелок, сигналов ЦПУ1МПЦ циклически каждые 0,6 с направляет в аппаратно-программное устройство АРМ10ДСП и через устройство 12 сопряжения в процессор 26 УВК11МАЛС.
При этом аппаратно-программное устройство АРМ10ДСП на основе полученной информации обеспечивает визуальное отображение поездной ситуации на станции на мониторе дежурного по станции в режиме реального времени и задание новых маршрутов, что позволяет дежурному по станции с наибольшей эффективностью осуществлять управление маневровой работой.
С учетом поездной ситуации на станции и плана маневровых работ дежурный по станции фиксирует границы маршрутов перемещения маневровых локомотивов и составов, задаваемых микропроцессорной централизацией.
Процессор 26 УВК11МАЛС аналогичным образом формирует данные о поездной ситуации на станции и задаваемых маршрутах перемещения, которые направляет на соответствующие входы блоков 27, 28 и 29.
Аппаратно-программный комплекс бортового оборудования каждого локомотива, участвующего в маневровом процессе, определяет координаты своего местоположения с учетом поправки стационарной дифференциальной станции 15.
Дифференциальную поправку вычисляет стационарная дифференциальная станция 15 навигационных сигналов и направляет ее значение в блок 30 для формирования соответствующего сообщения. Это сообщение блок 30 направляет на вход приемопередающего устройства 14 для передачи по радиоканалу приемопередатчикам 16 и далее процессорам 17 локомотивов, участвующих в маневровом процессе на станции.
Приемник 25 навигационных сигналов аппаратно-программного комплекса бортового оборудования каждого локомотива, участвующего в маневровом процессе, в режиме реального времени определяет координаты своего местоположения с учетом дифференциальной поправки, получаемой из процессора 17, и направляет их в процессор 17.
После чего процессор 17 формирует адресный пакет данных, включающий параметры движения, идентификационные данные локомотива и уточненные координаты его местонахождения, и передает его через приемопередатчик 16 посредством радиоканала передачи данных приемопередающему устройству 14.
Полученные данные приемопередающее устройство 14 направляет на соответствующий вход блока 29 УВК11МАЛС, на другой вход которого с выхода процессора 26 поступают данные о поездной ситуации на станции, а именно данные о текущем состоянии изолированных участков, стрелок, «виртуальных сигналов» ЦПУ1МПЦ. Блок 29 осуществляет обработку полученных данных, на основании которой контролирует перемещение каждого локомотива или состава, участвующего в маневровом процессе.
При этом параметры движения локомотива, координаты его местоположения и идентификационные данные блок 29 направляет в блок 27.
Блок 27 запрашивает из блока 32 памяти данные цифровой модели путевого развития станции и осуществляет формирование динамической модели на станции. При моделировании блок 27 на поездной модели станции фиксирует в автоматическом режиме на каждый момент времени состояние изолированных участков 5-7, стрелок 9 и «виртуальных» сигналов, предусмотренных конфигурацией системы микропроцессорной сигнализации для каждого изолирующего стыка в четном и нечетном направлениях, и местоположение маневровых локомотивов на путях станции согласно их координатам с указанием идентификационных номеров, а также местоположение вагонов на путях станции.
Результаты моделирования блок 27 направляет по каналам передачи данных в аппаратно-программное устройство АРМ13ДСЦ, на мониторе которого визуально отображается модель станции и текущая поездная ситуация.
Блок 28 УВК11МАЛС, получив информацию о координате каждого локомотива, участвующего в маневровых работах, о маршрутах, задаваемых ЦПУ1МПЦ, и данных цифровой модели путевого развития станции из блока 32, позиционирует локомотивы на путях станции, устанавливает соответствие между маршрутом и локомотивом, по цепочке замкнутых в маршруте участков определяет для каждого локомотива возможные зоны перемещения в четном и нечетном направлении, а также место локомотива в маневровом составе (впереди, сзади). После чего блок 28 для каждого локомотива передает в блок 30 данные о параметрах участков, входящие в маршрут его передвижения, о значениях допустимых скоростей по каждому их них, а также данные о месте локомотива в маневровом составе.
На соответствующий вход блока 30 поступают специальные команды от АРМ10ДСП. Специальные команды, например команда на принудительную остановку локомотива, разрешение выезда на перегон или ограничение скорости на изолированном участке и т.п. Дежурный по станции направляет их посредством аппаратно-программного устройства своего АРМ10ДСП через последовательно соединенные ЦПУ1МПЦ и устройство 12 сопряжения в блок 30. Кроме того, дифференциальная станция 15 передает в блок 30 новое значение дифференциальной поправки.
Блок 30 формирует для каждого локомотива телеграмму, содержащую маршрутное задание, включающее наименование границы маршрута в четном и нечетном направлениях, описание всех элементов маршрута, включая длины изолированных участков, уклоны и допустимые скорости перемещения по каждому участку, а также данные о новом значении дифференциальной поправки, о месте локомотива в маневровом составе и команды дежурного по станции, задающие условия движения. Сформированную телеграмму блок 30 направляет в приемо-передающее устройство 14 для передачи по радиоканалу передачи данных на вход локомотивного приемопередатчика 16 аппаратно-программного комплекса бортового оборудования локомотива.
Бортовой приемопередатчик 16 локомотива принимает телеграмму и направляет ее в процессор 17. Процессор 17 на основании маршрутного задания определяет параметры маршрута и текущую величину допустимой скорости движения, рассчитывает траекторию движения с учетом положения локомотива в маневровом составе и направляет их в блоки 19 и 18. Значение текущей величины допустимой скорости движения процессор 17 определяет как наименьшее значение технологических скоростей изолированных участков, занимаемых в текущий момент времени маневровым составом.
На экране машиниста отображается маршрутное задание, допустимое значение скорости и текущая длина маршрута. Машинист, пользуясь элементами управления блока 18, может выбрать «ручной» или «автоматический» режим реализации маршрута.
При движении маневрового состава локомотивом вперед траекторию его движения процессор 17 аппаратно-программного комплекса бортового оборудования рассчитывает на участке между координатой местоположения локомотива и координатой конца маршрута с учетом ограничения по скорости на изолированных участках, входящих в маршрут, а при задании маршрута на занятый путь - между координатой местоположения локомотива и координатой местоположения вагона, стоящего на его пути.
При движении маневрового состава вагонами вперед траекторию движения локомотива процессор 17 аппаратно-программного комплекса бортового оборудования рассчитывает на участке, между координатой местоположения локомотива, увеличенной на длину маневрового состава, и координатой конца маршрута, а при задании маршрута на занятый путь - между координатой локомотива, увеличенной на длину маневрового состава, и координатой головы местоположения вагонов, стоящих на данном пути.
Длину маневрового состава определяет блок 31 аппаратно-программного комплекса станционного оборудования как расстояние между координатой локомотива и координатой изолирующего стыка первого участка по ходу движения маневрового состава в момент его занятия.
При движении локомотивом вперед длину маневрового состава определяет блок 31 станционного оборудования, как расстояние между координатой локомотива и координатой изолированного стыка освободившегося участка в момент его освобождения.
Значение длины маневрового состава блок 31 направляет через последовательно соединенные блоки 29, 28 в блок 30, который включает данные о значении длины маневрового состава в маршрутное задание.
Кроме того, значение длины маневрового состава блок 31 направляет на соответствующий вход блока 27. На основании полученных данных блок 27 фиксирует на динамической модели станции изменение дислокации локомотивов и вагонов.
Изменения дислокации локомотивов и вагонов на динамической модели станции блок 27 направляет в аппаратно-программное устройство АРМ13ДСЦ для визуального отображения.
Информация о текущих значениях разрешенного маршрутом четного или нечетного перемещения состава, его длине, скорости и направлении движения блок 29 через блоки 12 сопряжения и ЦПУ1МПЦ передает в блок АРМ10ДСП, а через блок моделирования 27 - в блок АРМ13ДСЦ для отображения соответственно на мониторах дежурного по станции и маневрового диспетчера.
Реализацию и контроль траектории движения каждого локомотива по заданному маршруту обеспечивают посредством автоматического обмена цифровой информацией между аппаратно-программными комплексами станционного и бортового оборудования об изменениях координаты, скорости и о факторах, влияющих на условия движения по маршруту, в том числе о возникновении любых нештатных ситуаций.
Контроль траектории движения по маршруту осуществляет аппаратно-программный комплекс станционного оборудования на основании данных оценки пути, пройденного локомотивом, его скорости, изменения координаты локомотива на динамической модели станции, результатов отслеживания границ маневрового состава по моментам занятия и освобождения изолированных участков маршрута.
Реализацию маршрута движения локомотива осуществляют процессор 17 и блок 19 управления на основе маршрутного задания с учетом показаний датчиков 22 давления в тормозных цилиндрах локомотива, датчиков 23 пути и скорости, а также данных приемника 25 навигационных сигналов.
Блок 19 оцифровывает значения фактической скорости, пройденного пути, давления в тормозных цилиндрах и направляет их в процессор 17.
Процессор 17 сравнивает значение фактической скорости локомотива с допустимыми значениями скорости, по результатам сравнения формирует соответствующие сигналы и направляет их в блок 19, который осуществляет соответствующее управление цепями 20 и 21 тормозами и тягой локомотива для повышения или снижения скорости, служебного или экстренного торможения. При этом блок 17 направляет через речевой информатор 24 сообщение, предупреждающее машиниста об угрозе нарушения скоростного режима движения.
Приемник 25 навигационных сигналов в режиме реального времени отслеживает координаты местоположения локомотива и направляет их в процессор 17. Процессор 17 формирует соответствующее сообщение для направления в приемопередатчик 16 данных о текущих координатах местоположения локомотива и фактических параметрах его движения - скорости и пройденного пути. Приемопередатчик 16 по радиоканалу передает сообщение на вход приемопередающего устройства 14 для последующей передачи в блок 29 УВК11МАЛС.
Блок 29 осуществляет контроль перемещения маневрового состава путем обработки информации о занятии и освобождении изолированных участков по данным ЦПУ1МПЦ при его перемещении и учета пути пройденного локомотивом. По результатам контроля блок 29 формирует поправки к длине допустимого перемещения, которые через блок 28 передает в блок 30 для формирования соответствующего сообщения. Сообщение о изменении маршрутного задания формирует блок 28 и через блок 30 направляет в приемопередающее устройство 14 для передачи по радиоканалу данных приемопередатчику 16, который направляет его в процессор 17.
Информация о занятии и освобождении маневровым составом, ведомым локомотивом, изолированных участков 3-7 известной длины и о пути, пройденном локомотивом, формируемые блоком 29, позволяет блоку 31 рассчитать длину маневрового состава, а блоку 27 формировать модель дислокации на станции локомотивов и вагонов в режиме реального времени. Динамическая модель дислокации локомотивов и вагонов на станции направляется в аппаратно-программное устройство АРМ13ДСЦ для визуального отображения. Визуальное отображение в режиме реального времени динамической модели дислокации локомотивов и вагонов на мониторе АРМ13ДСЦ позволяет оптимизировать план маневров и контролировать непроизводительные расходы ресурсов.
Таким образом, предлагаемая система позволяет сократить избыточный пробег и повысить производительность локомотивов в процессе маневровой работы на станции, а также повысить эффективность и безопасность управления движением локомотивов при маневровой работе на станции при снижении капиталоемкости.
Способ определения времени проведения очередного профилактического обслуживания объекта и система для его реализации
Система для управления устройством лубрикации на локомотиве-рельсосмазывателе
Станционное устройство маневровой автоматической локомотивной сигнализации
Система передачи данных маневровой автоматической локомотивной сигнализации
Система контроля поверхности катания железнодорожной колесной пары
Устройство для осмотра вагонов
Устройство интеллектуальной бортовой аппаратуры маневровой автоматической локомотивной сигнализации
Способ интервального регулирования движения поездов на перегоне с автоблокировкой и устройство для его осуществления
Информационное вагонное табло
Комбинированное колесо
Способ определения времени проведения очередного профилактического обслуживания объекта и система для его реализации
Система для управления устройством лубрикации на локомотиве-рельсосмазывателе
Станционное устройство маневровой автоматической локомотивной сигнализации
Система передачи данных маневровой автоматической локомотивной сигнализации
Система контроля поверхности катания железнодорожной колесной пары
Устройство для осмотра вагонов
Устройство интеллектуальной бортовой аппаратуры маневровой автоматической локомотивной сигнализации
Способ интервального регулирования движения поездов на перегоне с автоблокировкой и устройство для его осуществления
Информационное вагонное табло
Комбинированное колесо

