Результат интеллектуальной деятельности: СПОСОБ И СИСТЕМА ИСПОЛЬЗОВАНИЯ ОТЛИЧИТЕЛЬНЫХ ОРИЕНТИРОВ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПРОМЫШЛЕННЫХ ТРАНСПОРТНЫХ СРЕДСТВ В НАЧАЛЕ РАБОТЫ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Варианты осуществления настоящего изобретения в целом относятся к системам навигации промышленных транспортных средств и, более конкретно, к способу и системе использования отличительных ориентиров для определения местонахождения промышленного транспортного средства.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Различные организации осуществляют на регулярной основе работу различных предприятий для решения задач, связанных с поставками и/или с запросами на поставку. Например, малые и большие компании, государственные организации и/или другие организационные единицы используют различные системы управления запасами и перемещениями этих запасов (например, сырьевые материалы, товары, машины и т.п.) в различных физических средах (например, на складах, в холодильных помещениях, на заводах и фабриках, в магазинах и т.п.). Транснациональные компании могут создавать склады в одной стране для хранения сырья, из которого производятся товары, перемещаемые для хранения на складе в другой стране для реализации на местных рынках. Склады должны быть хорошо организованы, чтобы поддерживать и/или улучшать производство и продажи. Если не обеспечивается оптимальная доставка сырья на завод, то производится меньше товаров. Таким образом, будут недополучены доходы за непроизведенные товары, в результате чего не будут компенсированы расходы на сырье.
К сожалению, физическая среда, такая как, например, складские помещения, накладывает различные ограничения, которые затрудняют своевременное выполнение различных задач. Складские помещения и другие совместно используемые площади должны быть безопасными для персонала. Некоторые работники управляют мощным оборудованием и промышленными транспортными средствами, такими как, вильчатые погрузчики, которые могут нанести людям тяжелые повреждения, в том числе и со смертельным исходом. Тем не менее, участие рабочих необходимо для управления промышленными транспортными средствами для выполнения различных производственных задач, таких как перемещение поддонов с товарами с одних мест на другие места в складских помещениях. В большинстве складов используется большое количество вильчатых погрузчиков, управляемых водителями, для перемещения различных грузов. Для повышения производительности на этих складах просто увеличивают количество таких погрузчиков, и, соответственно, увеличивается число водителей.
На некоторых складах используют оборудование автоматизации выполнения этих задач. На этих складах могут использоваться автоматические промышленные транспортные средства, такие как вильчатые погрузчики, для перемещения грузов по определенным маршрутам для складирования этих грузов в назначенных местах. При навигации промышленного транспортного средства крайне важно, чтобы положение транспортного средства определялось с высокой точностью. Под положением транспортного средства в настоящей заявке понимается его местонахождение и ориентация, то есть положение объекта в пространстве, которое характеризуется координатами в прямоугольной системе координат и углами относительно осей координат или подмножеством таких координат и углов. Если невозможно будет определить текущее положение промышленного транспортного средства на карте, оно не сможет выполнять задачи без предварительного знания физической среды. Кроме того, важно, чтобы промышленное транспортное средство точно определяло свое местонахождение в начале работы, когда имеется несколько отличительных естественных параметры среды, поскольку неточности определения положения транспортного средства отрицательно сказываются на качестве навигации транспортного средства. Определение местонахождения в начале работы относится к любому моменту, когда нет текущего положения транспортного средства, например, после его включения или в процессе работы, когда нет текущих достоверных данных о положении транспортного средства.
Поэтому в отрасли существует потребность в способе и системе использования отличительных маркеров для определения местонахождения промышленного транспортного средства в начале работы без предварительной информации о его положении в физической среде.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В настоящем изобретении предлагается способ и система использования отличительных ориентиров для определения местонахождения промышленных транспортных средств в начале их работы. В одном из вариантов предложен способ использования ранее размещенных объектов, местонахождение которых известно, в качестве ориентиров для управления промышленным транспортным средством. Способ включает идентификацию варианта начала работы по информации датчиков с использованием: либо отличительных ориентиров, либо ранее размещенных объектов, местонахождение которых известно. После идентификации варианта начала работы определяется местонахождение отличительного маркера или ранее размещенного объекта, местонахождение которого известно, причем отличительный маркер или ранее размещенный объект соответствует некоторой зоне физической среды. Положение промышленного транспортного средства получают в соответствии с идентифицированным ранее размещенным объектом или отличительным маркером, и управление промышленным транспортным средством осуществляется в соответствии с его полученным положением.
В изобретении предлагается также компьютер, связанный с промышленным транспортным средством и содержащий модуль навигации в физической среде для идентификации варианта начала работы по информации датчиков и обеспечения возможности управления промышленным транспортным средством в соответствии с его полученным положением. В изобретении также предлагается машиночитаемая среда, содержащая одну или несколько команд, которые, будучи выполненными по меньшей мере одним процессором, обеспечивают возможности управления промышленным транспортным средством в соответствии с его полученным положением.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для того чтобы можно было лучше понять вышеуказанные особенности настоящего изобретения, кратко охарактеризованного в предыдущем разделе, ниже приводится подробное описание изобретения на примерах некоторых вариантов, которые иллюстрируются на прилагаемых чертежах. Однако следует отметить, что прилагаемые чертежи иллюстрируют только типичные варианты осуществления изобретения и поэтому не должны рассматриваться как ограничения его объема, поскольку возможны и другие, в равной степени эффективные, варианты.
Фигура 1 - схематический вид в перспективе физической среды, в которой могут быть реализованы различные варианты осуществления настоящего изобретения.
Фигура 2 - схематический вид в перспективе вильчатого погрузчика, предназначенного для навигации в физической среде для выполнения различных задач по одному или нескольким вариантам.
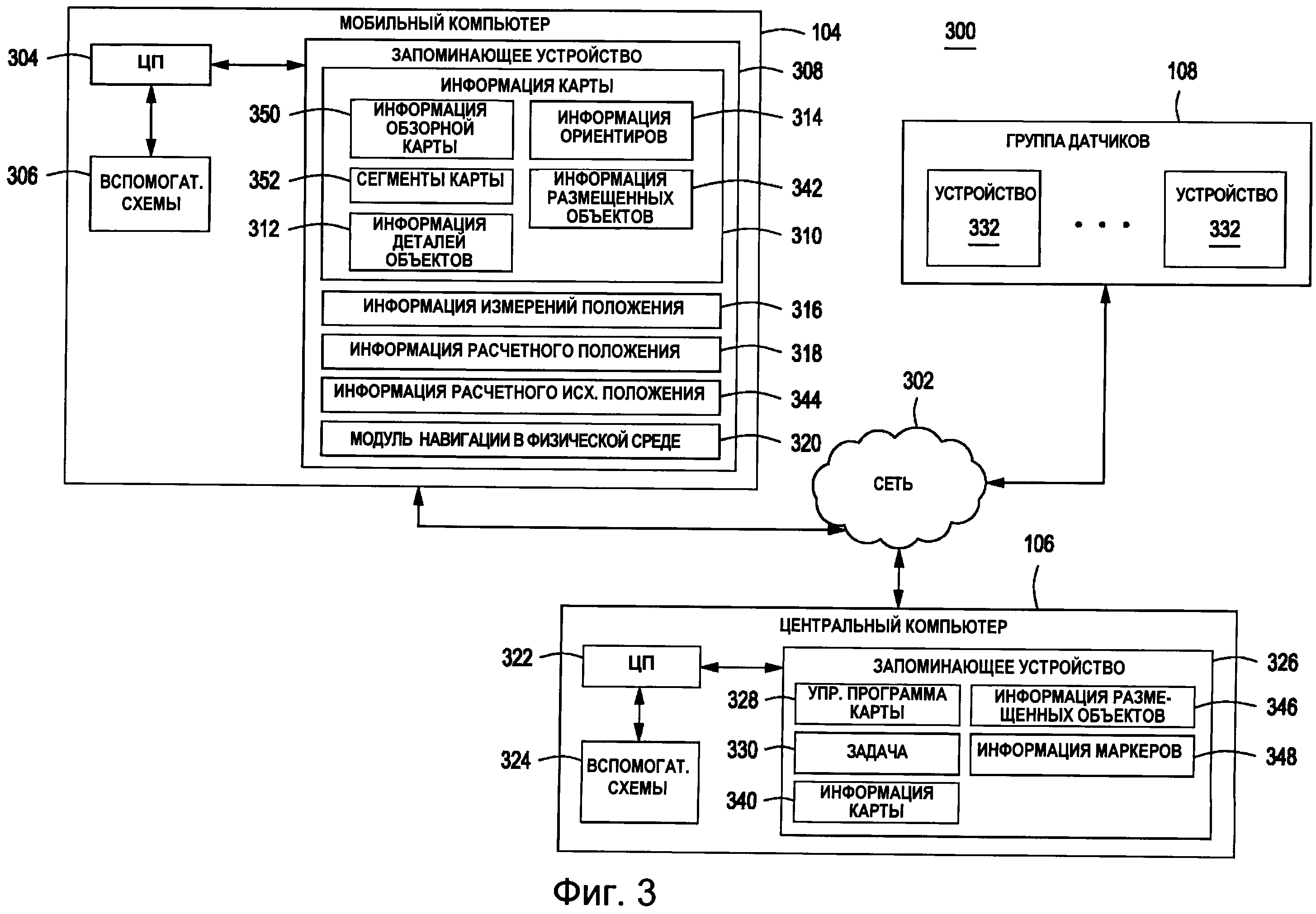
Фигура 3 - структурная блок-схема системы, обеспечивающей использование отличительных ориентиров для определения местонахождения промышленного транспортного средства в начале работы по одному или нескольким вариантам.
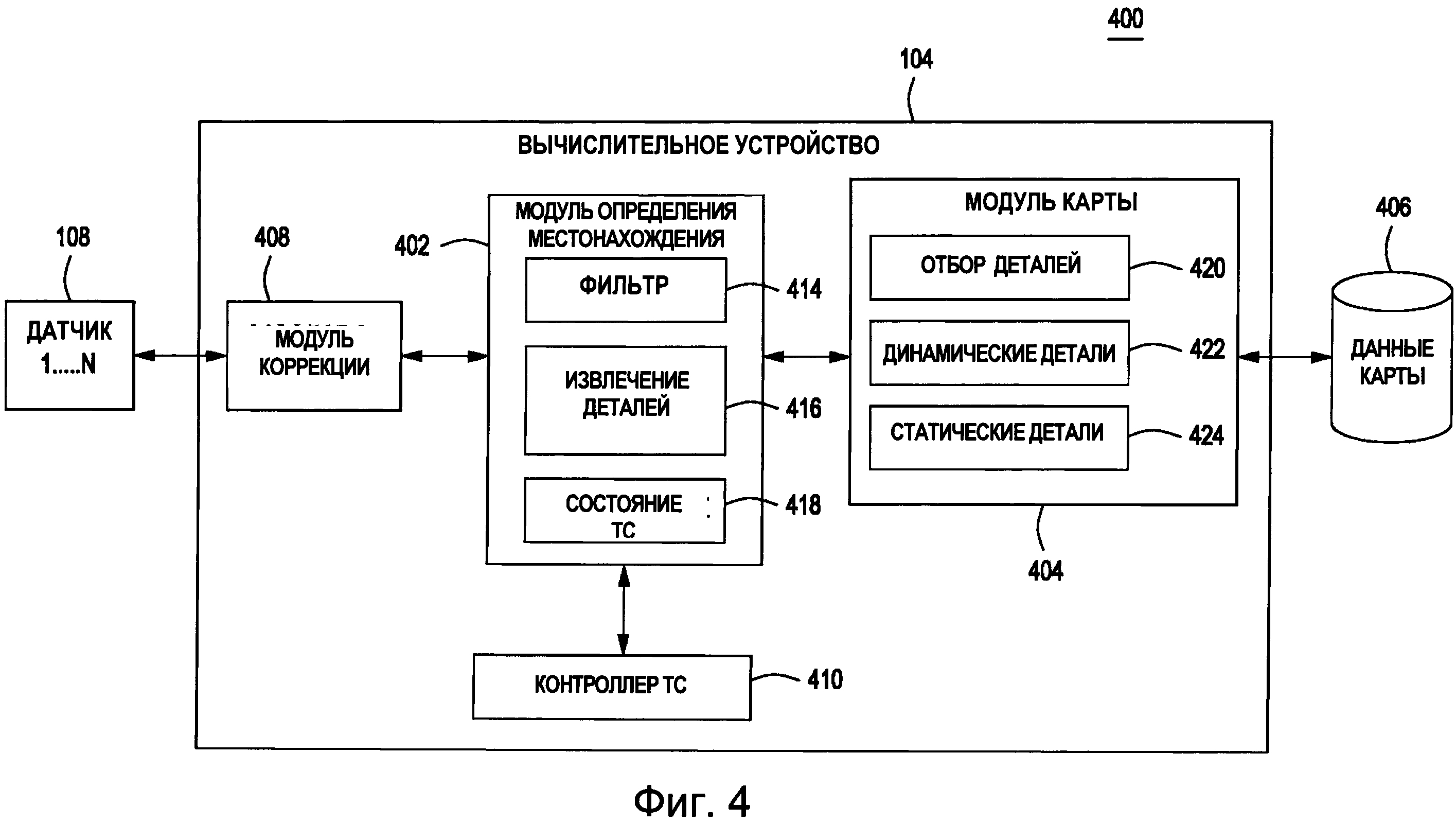
Фигура 4 - функциональная блок-схема системы, обеспечивающей определение точного местонахождения промышленного транспортного средства по одному или нескольким вариантам.
Фигура 5 - пример карты физической среды, содержащей отличительные ориентиры по одному или нескольким вариантам.
Фигура 6 - блок-схема способа определения местонахождения промышленного транспортного средства относительно обзорной карты в начале работы.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
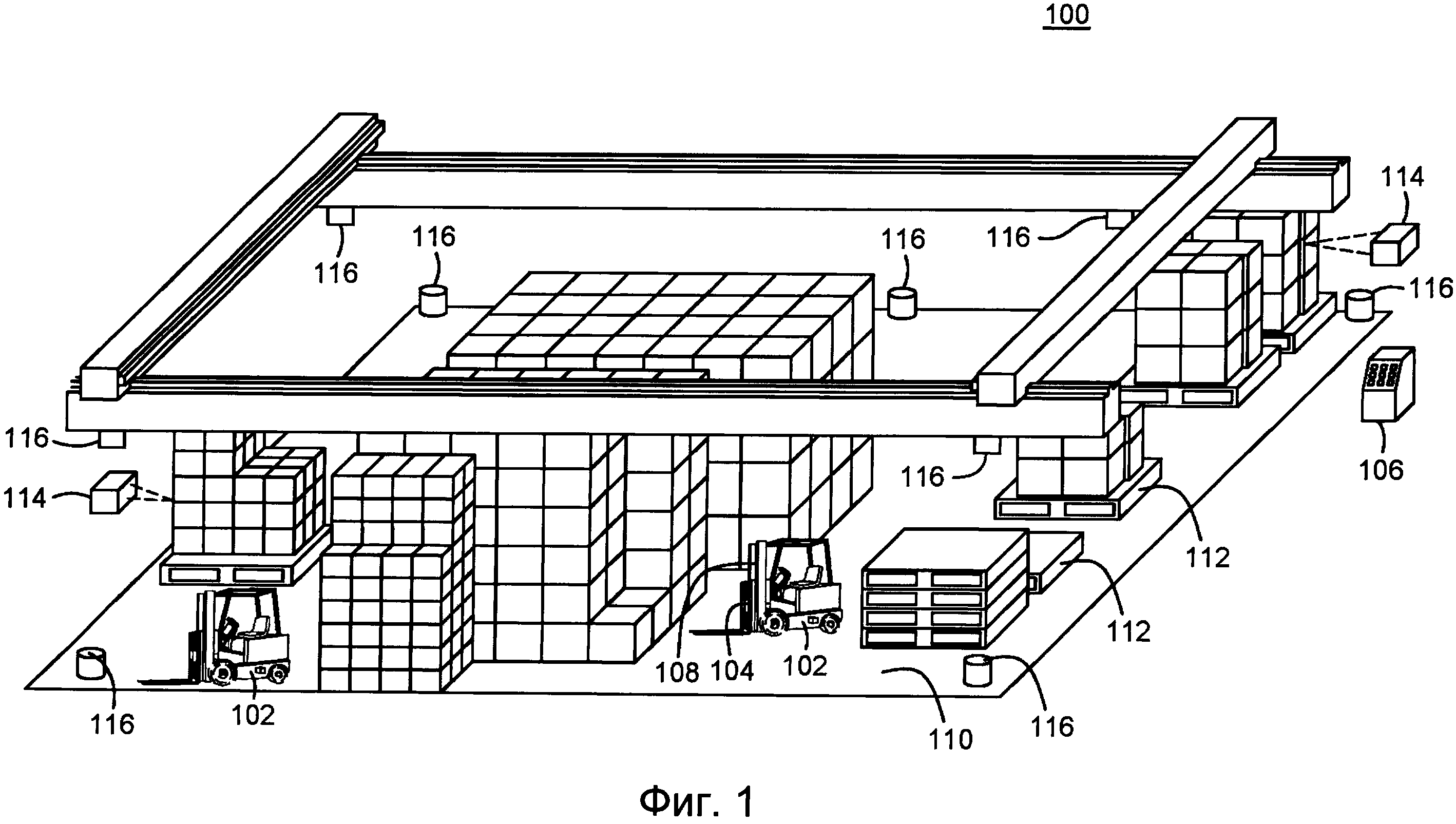
На фигуре 1 представлен схематический вид в перспективе физической среды 100, в которой могут быть реализованы различные варианты настоящего изобретения.
В некоторых вариантах физическая среда 100 содержит транспортное средство 102, соединенное с мобильным компьютером 104, с центральным компьютером 106, а также с группой 108 датчиков. Группа 108 датчиков содержит множество устройств для анализа различных объектов в физической среде 100 и передачи данных (например, изображений, видеоданных, картографической информации, трехмерной графической информации и/или т.п.) в мобильный компьютер 104 и/или в центральный компьютер 106, как это будет описано ниже. Группа 108 датчиков включает различные датчики, такие как, например, кодовые датчики положения, ультразвуковые дальномеры, лазерные дальномеры, датчики давления и т.п.
Физическая среда 100 содержит также пол 110, на котором размещено множество объектов. Эти объекты включают поддоны 112, множество единиц 114 хранения и/или другие объекты, указанные ниже. Физическая среда 100 также содержит различные препятствия (не показаны), мешающие нормальной работе транспортного средства 102.
Некоторые объекты могут представлять собой препятствия для транспортных средств при их движении по различным маршрутам (например, по заранее рассчитанным или динамическим изменяющимся маршрутам), если такие объекты нарушают выполнение задачи.
Физическая среда 100 также содержит множество маркеров 116. Множество маркеров 116 показаны на фигуре 1 как объекты, прикрепленные к потолку. В некоторых вариантах маркеры 116 представляют собой маячки, которые могут быть уникальными или формируют уникальную конфигурацию, и которые обеспечивают навигацию в физической среде, как это описано ниже. Множество маркеров 116, а также другие объекты, находящиеся в физической среде 100, являются параметрами окружающей обстановки. Мобильный компьютер 104 извлекает информацию по этим параметрам и определяет точное текущее положение транспортного средства 102, и затем управление этим транспортным средством осуществляется в соответствии с этим текущим положением.
Вышеописанное управление работой транспортного средства может включать одну или несколько операций, осуществляемых водителем, находящимся на промышленном транспортном средстве, одну или несколько операций, осуществляемых в автоматическом режиме по командам удаленного компьютера или компьютера, размещенного на промышленном транспортном средстве, или сочетания указанных операций. Операции по управлению транспортным средством могут быть выбраны из группы, содержащей операцию по навигации, операцию по определению местонахождения, операцию по управлению направлением движения, операцию по управлению скоростью, операцию по обработке груза, подъемную операцию, отображение тревожной ситуации на транспортном средстве, или их сочетания.
Физическая среда 100 может быть складом или холодильным помещением для складирования множества единиц 114 хранения, подготавливаемых для транспортировки. На складе могут быть погрузочно-разгрузочные площадки для погрузки и разгрузки множества единиц хранения, транспортируемых коммерческими транспортными средствами, по железной дороге, по воздуху и/или по воде. Единицы 114 хранения обычно представляют собой различные товары, продукты, и/или сырьевые материалы, и т.п. Например, множество единиц 114 хранения могут быть потребительскими товарами, размещенными на стандартных ISO-поддонах, установленных вильчатыми погрузчиками на стеллажи, для последующей доставки в розничные магазины. Промышленное транспортное средство 102 участвует в обеспечении такой доставки путем перемещения потребительских товаров в указанные места, из которых их могут забрать коммерческие транспортные средства (например, грузовые автомобили) для последующей доставки этих товаров в один или несколько пунктов назначения.
В соответствии с одним или несколькими вариантами осуществления изобретения транспортное средство 102 может быть транспортным средством с автоматическим управлением, таким как автоматический вильчатый погрузчик, который приспособлен для обработки и/или перемещения множества единиц 114 хранения по полу 110. Транспортное средство 102 использует один или несколько подъемных органов, таких как вилочный захват, для подъема одной или нескольких единиц 114 хранения с последующей их транспортировкой по некоторому маршруту для размещения в заданном месте. В других вариантах одна или несколько единиц 114 хранения могут быть размещены на поддоне 112, который поднимается транспортным средством 102 и перемещается в заданное место.
Поддон 112 представляет собой плоскую транспортную конструкцию для удерживания товаров в устойчивом положении при подъеме транспортным средством 102 и/или другим подъемным устройством (например, устройством для подъема поддонов и/или фронтальным погрузчиком). Поддон 112 является несущим основанием для грузов, обеспечивающим их эффективную перевалку и хранение. Различные поддоны 112 могут использоваться в системе стеллажей (не показаны). В некоторых системах стеллажей используются роликовые или гравитационные транспортеры для подачи вперед одной или нескольких единиц 114 хранения на одном или нескольких поддонах 112. Один или несколько поддонов 112 подаются вперед, пока они не будут остановлены замедляющим устройством, физическим ограничителем или другим поддоном 112. В других системах стеллажей поддоны располагаются на горизонтальных балках, которые сцепляются с конструкцией поддонов. В этом случае поддоны на самом нижнем уровне расположены на полу и выходят вперед за пределы системы стеллажей, в результате чего возникают трудности для использования стоек стеллажей в качестве опорных элементов для целей навигации.
В некоторых вариантах мобильный компьютер 104 и центральный компьютер 106 - это вычислительные устройства, управляющие транспортным средством 102 для выполнения различных задач в физической среде 100. Мобильный компьютер 104 приспособлен для соединения с транспортным средством 102. Мобильный компьютер 104 может также принимать и объединять данные (например, информацию лазерного сканера, информацию изображений и/или другие данные от различных датчиков), поступающие из группы 108 датчиков. Различные программные модули в мобильном компьютере 104 управляют работой транспортного средства 102, как это будет описано ниже.
Во многих случаях некоторые зоны среды 100 представляют собой зоны хранения блочных элементов. В этих зонах установлены штабели поддонов 112, содержащих множество мест 114 хранения. Обычно такие зоны содержат много рядов одного продукта, каждый из которых содержит в глубину много поддонов. Такие штабели поддонов обычно достаточно высоки, так что маркеры 116 или другие параметры фиксированной инфраструктуры не будут видны промышленному транспортному средству, которое находится в глубине ряда поддонов.
В некоторых вариантах мобильный компьютер 104 сконфигурирован для определения положения транспортного средства в начале работы, что требует определения местонахождения относительно обзорной карты в условиях отсутствия какой-либо информации о предыдущем положении транспортного средства. Обзорная карта обеспечивает заранее известные картографические данные в глобальной системе координат. После того как мобильный компьютер 104 определяет, что положение промышленного транспортного средства 102 неизвестно (например, когда система автоматизации только запущена), он осуществляет поиск для определения наиболее вероятного положения промышленного транспортного средства 102 с использованием различных измерений, полученных из информации датчиков, таких как различные геометрические элементы (углы, длины, радиусы). Затем в соответствии с полученным положением транспортного средства мобильный компьютер 104 определяет маршрут для выполнения задачи в физической среде 100.
В некоторых вариантах мобильный компьютер 104 использует отличительный навигационный маячок 116, такой как отражающий штрихкод, для определения исходного положения. В других вариантах мобильный компьютер распознает ранее установленный поддон, содержащий некоторый продукт, планирует маршрут к ранее складированному продукту и осуществляет навигацию промышленного транспортного средства 102, чтобы можно было считать штрихкод продукта. Затем мобильный компьютер 104 запрашивает у центрального компьютера 106 местонахождение ранее складированного продукта и использует это местонахождение для определения исходного положения транспортного средства. В других вариантах мобильный компьютер 104 определяет из различных измерений среды, что промышленное транспортное средство находится в проходе между стеллажами, планирует маршрут и направляет транспортное средство к такому месту прохода, обычно к концу прохода, где может быть достаточно отличительных ориентиров для измерений, обеспечивающих определение исходного положения. Специалистам в данной области техники будет понятно, что исходное положение промышленного транспортного средства 102 необходимо для его успешной навигации, однако в нижеописанных вариантах для обеспечения навигации используется расчетное исходное положение, когда для определения точного исходного положения транспортного средства необходимо его перемещение.
Как это описано ниже, мобильный компьютер 104 определяет одну или несколько зон в физической среде 100 для обеспечения определения местонахождения. Следует понимать, что функции мобильного компьютера 104 не ограничиваются лишь определением местонахождения в начале работы. Каждой зоне соответствует отличительный ориентир, такой как один из множества маркеров 116 или один из множества объектов. После распознавания маркера координаты зоны, связанной с этим маркером, будут использоваться в качестве оценки исходного положения транспортного средства в начале работы, и после получения оценки исходного положения измерения, поступающие от всех датчиков, проверяются на соответствие этому исходному положению, и затем осуществляется уточнение исходного положения.
Например, отличительный ориентир может быть размещенной единицей хранения, такой как один из поддонов 112 или одна из единиц 114 хранения, установленная на нем, которая может быть однозначно идентифицирована (например, по уникальному штрихкоду, радиометке, форме или по другому параметру, который может быть идентифицирован датчиками промышленного транспортного средства 102). В этом случае, когда поддон 112 и/или установленный на нем продукт сканируется, отбирается или обрабатывается иным образом, известное положение такого объекта, которое может быть записано, например, в базе данных системы управления складом, может использоваться в качестве маркера в процессе определения положения транспортного средства.
В другом примере множество маркеров 116 может включать множество маячков, размещенных в определенных местах внутри соответствующих зон, так что формируется известная и уникальная конфигурация. В других вариантах отличительный ориентир может содержать отражающий штрихкод, визуальное обозначение, конфигурацию световых элементов, которые формируют отличительный световой знак, конфигурацию электрических, магнитных или электромагнитных элементов, расположенных таким образом, что они формируют отличительную конфигурацию магнитного поля или отличительные отметки на полу, которые могут быть нанесены с использованием красок или другого средства.
В одном из вариантов множество маркеров 116 могут излучать радиочастотные или другие измеряемые сигналы, которые формируют отличительные сигнатуры и могут анализироваться независимо соответствующими электронными датчиками на транспортном средстве для определения его положения с использованием триангуляции.
Как только мобильный компьютер 104 распознает один из отличительных ориентиров, различные программные модули определяют, в какой из зон физической среды находится промышленное транспортное средство. Если такое местонахождение транспортного средства определяется в начале работы, мобильный компьютер 104 загружает соответствующий сегмент карты из базы данных, как это описывается ниже. В другом варианте мобильному компьютеру 104 необходимо только запросить определенный сегмент - карту из центрального компьютера 106 для осуществления навигации промышленного транспортного средства 102.
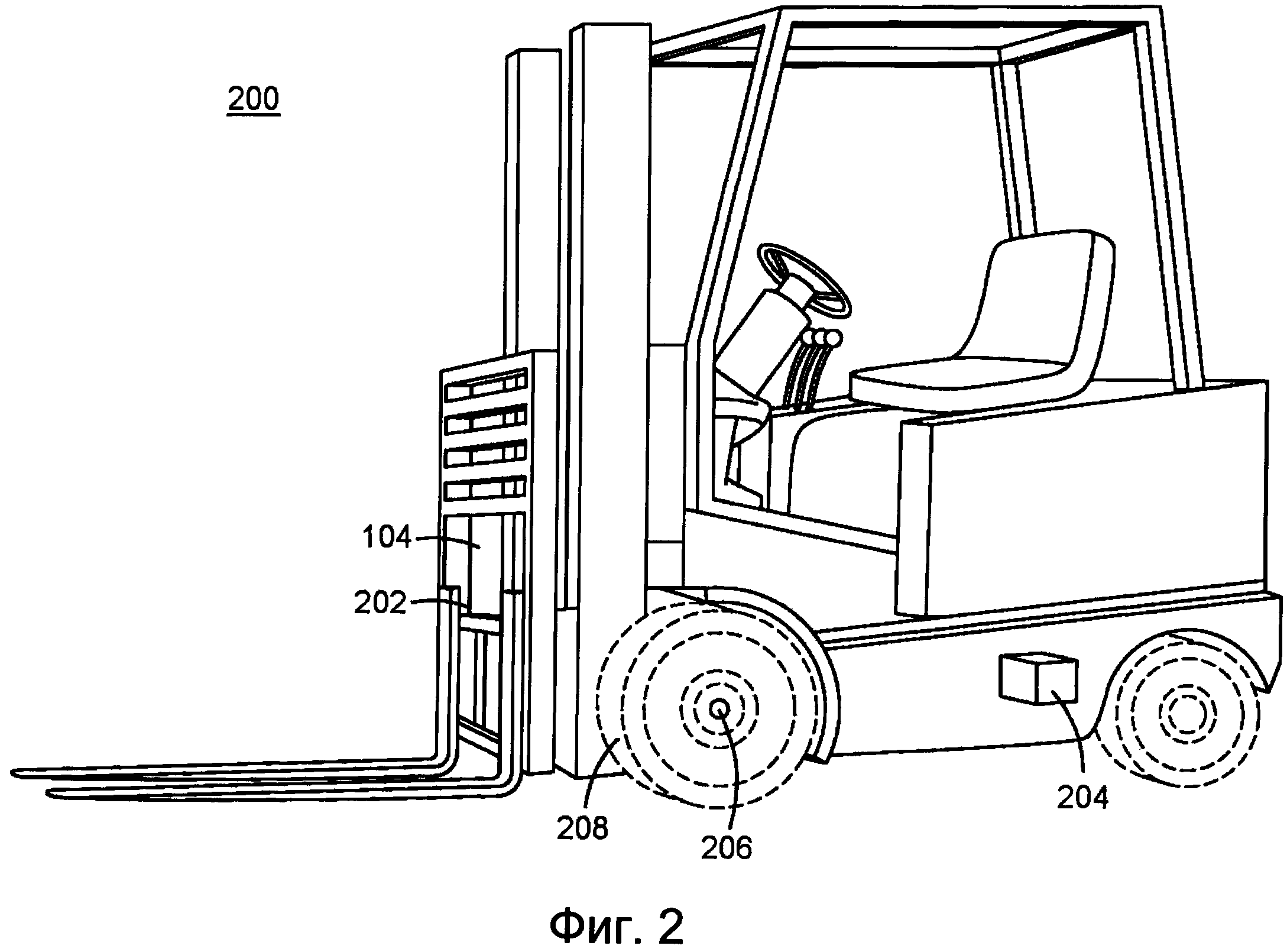
На фигуре 2 представлен схематический вид в перспективе вильчатого погрузчика 200, который может использоваться для автоматизации выполнения различных задач в физической среде по одному или нескольким вариантам осуществления настоящего изобретения.
Вильчатый погрузчик 200 (то есть автопогрузчик с вертикальной рамой, автоштабелер, погрузчик с боковым выдвижным грузоподъемником или вильчатый подъемник) представляет собой промышленный электрокар, который может иметь разную грузоподъемность и используется для подъема и транспортировки различных объектов. В некоторых вариантах вильчатый погрузчик 200 приспособлен для перемещения одного или нескольких поддонов (например, поддонов 112 фигуры 1) с единицами хранения (например, единицами 114 хранения, указанными фигуры 1) по маршрутам в физической среде (например, в физической среде 100 фигуры 1). Маршруты могут быть рассчитаны заранее или рассчитываются динамически при получении задач. Вильчатый погрузчик 200 может въезжать в зону хранения, в которой размещено множество поддонов, для размещения или извлечения поддона. Вильчатый погрузчик 200 многократно въезжает в зону хранения и помещает поддоны на консольные рычаги или на направляющие балки. Таким образом, размеры вильчатого погрузчика 200, включая общую ширину и ширину грузоподъемника, должны быть точно известны при определении ориентации, связанной с объектом и/или с местом назначения.
Вильчатый погрузчик 200 имеет вилы с двумя или несколькими зубцами для подъема и перемещения единиц хранения в физической среде. Вместо двух или нескольких зубцов вильчатый погрузчик 200 может иметь одну или несколько металлических стоек (не показаны) для подъема специфических грузов (например, рулонов ковров, катушек проволоки и/или т.п.). В одном из вариантов вильчатый погрузчик 200 имеет гидравлические телескопические вилы, которые обеспечивают возможность размещения двух или более поддонов друг за другом, без проходов между этими поддонами.
Вильчатый погрузчик 200 по одному или нескольким вариантам может также включать различные исполнительные механизмы с механическим, гидравлическим и/или электрическим приводом. В некоторых вариантах вильчатый погрузчик 200 снабжен одним или несколькими гидравлическими механизмами, которые обеспечивают боковое и/или вращательное движение двух или более зубцов вил. В одном из вариантов вильчатый погрузчик 200 содержит гидравлический исполнительный механизм для сближения и раздвижения зубцов вил. В другом варианте вильчатый погрузчик 200 содержит механический или гидравлический компонент для сжатия транспортируемых грузов (например, бочки, кеги, рулоны бумаги и/или т.п.).
Вильчатый погрузчик 200 может быть соединен с мобильным компьютером 104, который содержит программные модули для управления работой вильчатого погрузчика 200 в соответствии с одной или несколькими задачами. Вильчатый погрузчик 200 также соединен с различными датчиками (например, с группой 108 датчиков фигуры 1), которые передают информацию измерений (например, информацию изображений, видеоинформацию, информацию о дальности в горизонтальной плоскости и/или трехмерные графические данные) в мобильный компьютер 104 для извлечения информации, связанной с параметрами окружающей обстановки. Эти датчики могут быть установлены на вильчатом погрузчике 200 в любом месте внутри или снаружи погрузчика или же могут быть установлены в известных местах физической среды 100. Типовые варианты датчиков, установленных на вильчатом погрузчике 200, обычно содержат камеру 202, двухмерный лазерный сканер 204, установленный на каждой стороне погрузчика, и/или кодовый датчик 206 положения, прикрепленный к каждому колесу 208. В других вариантах вильчатый погрузчик 200 имеет только двухмерный лазерный сканер 204 и кодовый датчик 206 положения. В других вариантах вильчатый погрузчик 200 может иметь только камеру 202 и кодовый датчик 206 положения. Вильчатый погрузчик 200 может использовать любую группу датчиков с зоной обзора, охватывающей текущее направление движения (например, движения вперед/назад, движения вил вверх/вниз, выдвижения/втягивания вил, и/или т.п.). Кодовые датчики положения обеспечивают информацию, относящуюся к перемещению транспортного средства. Датчики, установленные снаружи погрузчика, могут включать лазерные сканеры или камеры, размещенные таким образом, чтобы можно было получить как можно больше информации, помогающей осуществлять операции погрузчика в автоматическом режиме. Внешние датчики могут включать ограниченное количество приемопередатчиков и/или других активных или пассивных средств, с помощью которых автоматизированное транспортное средство может получать информацию для определения своего положения. В некоторых вариантах количество датчиков (например, лазерных сканеров, лазерных дальномеров, кодовых датчиков положения, датчиков давления и/или т.п.), а также их положение на вильчатом погрузчике 200 зависят от транспортного средства, и расположение этих датчиков на погрузчике влияет на обработку информации измерений. Например, если все лазерные сканеры размещены в точках, координаты которых могут быть определены, группа 108 датчиков может обрабатывать эту информацию и приводить ее к центральной точке для вильчатого погрузчика 200. Кроме того, группа 108 датчиков может объединять информацию сканирования, получаемую от нескольких лазеров, в информацию сканирования одного виртуального лазера, которая может использоваться различными программными модулями для управления вильчатым погрузчиком 200.
На фигуре 3 приведена структурная блок-схема системы 300 обеспечения определения точного местонахождения промышленного транспортного средства в начале работы по одному или нескольким вариантам. В некоторых вариантах система 300 включает мобильный компьютер 104, центральный компьютер 106 и группу 108 датчиков, причем компоненты системы 300 связаны друг с другом по сети 302.
Мобильный компьютер 104 представляет собой вычислительное устройство (например, сервер, настольный компьютер, ноутбук, планшет и т.п.), содержащее центральный процессор 304, различные вспомогательные схемы 306 и запоминающее устройство 308. Центральный процессор 304 может содержать один или несколько микропроцессоров или микроконтроллеров, которые обеспечивают обработку данных и их промежуточное хранение. Различные вспомогательные схемы 306 обеспечивают работу центрального процессора 304 и могут содержать тактовые генераторы, шины, источники питания, схемы ввода/вывода и т.п. Запоминающее устройство 308 включает постоянное ЗУ, оперативное ЗУ, ЗУ на магнитных дисках, ЗУ на оптических дисках, съемные устройства хранения информации и т.п. Запоминающее устройство 308 содержит различную информацию, такую как информация 310 карты, информацию 316 измерений положения, информацию 318 расчетного положения и информацию 344 расчетного исходного положения. Информация карты содержит: обзорную карту 350, сегменты 352 карты, информацию 312 характеристик объектов, информацию 314 ориентиров, а также расчетную информацию 342 ранее размещенных объектов, местонахождение которых известно. Запоминающее устройство 308 содержит различные программные модули, такие как модуль 320 навигации в физической среде.
Центральный компьютер 106 представляет собой вычислительное устройство (например, сервер, настольный компьютер, ноутбук, планшет и т.п.), содержащее центральный процессор 322, различные вспомогательные схемы 324 и запоминающее устройство 326. Центральный процессор 322 может содержать один или несколько микропроцессоров или микроконтроллеров, которые обеспечивают обработку данных и их промежуточное хранение. Различные вспомогательные схемы 324 обеспечивают работу центрального процессора 322 и могут содержать тактовые генераторы, шины, источники питания, схемы ввода/вывода и т.п. Запоминающее устройство 326 включает постоянное ЗУ, оперативное ЗУ, ЗУ на магнитных дисках, ЗУ на оптических дисках, съемные устройства хранения информации и т.п. Запоминающее устройство 326 содержит различные программные модули, такие как управляющая программа 328 карты и менеджер задач (не показан), а также различные данные, такие как данные 330 задач.
Сеть 302 представляет собой систему связи, которая соединяет компьютеры по проводам, по кабелю, по волоконно-оптическому кабелю и/или по каналам беспроводной связи, и работа которой обеспечивается различными известными компонентами сетей, такими как концентраторы, коммутаторы, маршрутизаторы и т.п. Сеть 302 может использовать различные хорошо известные протоколы для обмена информацией между ресурсами сети. Например, сеть 302 может быть частью сети Интернет или интрасети, использующей различную инфраструктуру связи, такую как Ethernet, WiFi, WiMax, GPRS и т.п.
Группа 108 датчиков соединена с мобильным компьютером 104, который соединен с автоматическим транспортным средством, таким как вильчатый погрузчик (например, вильчатый погрузчик 200 фигуры 2), с возможностью обмена информацией. Группа 108 датчиков содержит множество датчиков 332 для контроля физической среды и получения различной информации, которая записывается мобильным компьютером 104. В некоторых вариантах группа 108 датчиков может содержать любые сочетания лазерных сканеров и/или камер. В некоторых вариантах множество измерительных устройств 332 может быть установлено на автоматическом транспортном средстве. Например, лазерный сканер и камера могут быть прикреплены к грузоподъемной раме над или под вильчатым захватом.
В некоторых вариантах информация 310 карты содержит информацию 350 обзорной карты, которая используется модулем 320 навигации в физической среде для оценки окружающей обстановки в начале работы. Информация обзорной карты может содержать данные, определяющие различные варианты начала работы, включая детали, которые могут наблюдаться в каждом варианте. Например, информация обзорной карты может обеспечивать типовую схему прохода между стеллажами, типовую схему зоны, заставленной штабелями поддонов, схемы стенок физической среды и стационарных компонентов инфраструктуры, которые могут быть отличительными навигационными маркерами, такими как отражающие маячки. Модуль 320 навигации в физической среде в начале работы использует информацию обзорной карты для идентификации одного из вариантов начала работы, как это описано ниже.
В некоторых вариантах информация 310 карты содержит ориентиры, которые могут быть динамическими или статическими, в физической среде, такой как зона, в которой могут работать одновременно люди и автоматические промышленные транспортные средства. Каждый ориентир состоит из деталей, которые могут наблюдаться датчиками. Информация 310 карты может содержать вектор известных наблюдаемых и/или ожидаемых деталей. В некоторых вариантах информация 310 карты содержит указания координат объектов (например, ранее установленных объектов) в физической среде. Физическая среда может быть разделена на зоны, информация по которым записывается в разных сегментах 352 карты. Формирование сегментов карты описано в заявке US №13/159,501, поданной 14 июня 2011 г. (правообладателем по заявке является заявитель по настоящей заявке), полное содержание которой вводится здесь ссылкой. Информация 312 деталей объектов определяет детали (например, кривые и прямые линии и т.п.), связанные с одной или несколькими инфраструктурами, препятствиями или ранее установленными объектами, местонахождение которых известно. Как это будет описано ниже, модуль 320 навигации в физической среде может назначить некоторые из объектов, координаты которых были определены, в качестве отличительных ориентиров, которые соответствуют определенным сегментам карты. Такие объекты идентифицируются однозначным образом с помощью штрихкодов, радиометок, специальной формы или иных отличительных характеристик, которые могут быть измерены датчиками промышленного транспортного средства. После идентификации объекта информация 342 по объекту, координаты которого были определены, может быть извлечена мобильным компьютером для получения характеристик этого объекта, прежде всего положения объекта. Если информация 342 по идентифицированному объекту не записана на локальном уровне, мобильный компьютер может запросить эту информацию у центрального компьютера 106. Центральный компьютер 106 поддерживает информацию 346 в отношении всех объектов, координаты которых были определены. Информация 342 по объектам, координаты которых были определены (то есть положение таких объектов), используется мобильным компьютером 104 для определения точного исходного положения транспортного средства.
После определения исходного положения транспортного средства с помощью объекта, местонахождение которого известно, транспортное средство может работать автономно. В некоторых вариантах информация 310 карты содержит координаты по меньшей мере одного ориентира, записанные в информации 314 ориентиров. Информация 314 ориентиров указывает количество деталей, формирующих каждый ориентир, а также и другие данные, такие как тип ориентира, местонахождение, информация измерений и т.п. Некоторые из этих ориентиров находятся в непосредственной близости от промышленного транспортного средства. Например, такие ориентиры и промышленное транспортное средство могут быть расположены в одной зоне физической среды. Сравнивая информацию деталей, относящихся к расположенным неподалеку ориентирам, с информацией деталей, относящихся к отличительным ориентирам, модуль 320 навигации в физической среде определяет точное положение транспортного средства.
В некоторых вариантах информация 316 измерений содержит объединение информации, передаваемых множеством устройств (датчиков) 332. Такая информация содержит одну или несколько измеряемых деталей. В одном из вариантов одна или несколько камер передают информацию изображений и/или видеоданные, относящиеся к физической среде, окружающей транспортное средство. В другом варианте один или несколько лазерных сканеров (например, трехмерные лазерные сканеры) анализируют объекты в физической среде и извлекают данные, относящиеся к различным параметрам объектов, таким как размеры и форма. Затем извлеченные данные могут быть сравнены с трехмерными моделями объектов. Лазерный сканер создает массивы точек, соответствующие поверхностям объекта. Затем эти точки могут использоваться для экстраполяции формы объекта (реконструкция). Лазерные сканеры имеют зону обзора, имеющую коническую форму. В то время как камеры записывают информацию о цвете поверхностей объекта в пределах их зоны обзора, лазерные сканеры обеспечивают информацию дальности до этих поверхностей объекта.
Данные, поступающие из лазерного сканера, содержат расстояние до каждой точки каждой поверхности объекта. На основе этих расстояний модуль 320 навигации в физической среде определяет трехмерные координаты каждой точки в местной системе координат относительно каждого лазерного сканера. Модуль 320 навигации в физической среде преобразует эти координаты относительно транспортного средства. Лазерные сканеры осуществляют сканирования под различными углами для определения характеристик точек на всех поверхностях объекта. Модуль 320 навигации в физической среде нормализует данные, полученные в результате многих сканирований, выравнивая дальности относительно общей системы координат, такой как глобальная система координат. Затем соответствующие программные модули объединяют детали объектов для формирования моделей объектов в зоне обзора сканера.
В некоторых вариантах информация 318 расчетного положения содержит оценку местонахождения и/или ориентации транспортного средства, которая указывается в настоящем описании как расчетное положение транспортного средства. Информация 344 расчетного исходного положения может быть получена из информации 342 ранее размещенного объекта, местонахождение которого известно. Как только мобильный компьютер 104 получает информацию 344 расчетного исходного положения, модуль 320 навигации в физической среде определяет обновленные оценки положения, используя предыдущее положение транспортного средства в дополнение к измерениям датчиков, позволяющим определять перемещение (например, к измерениям инерциального измерительного блока или одометра). Модуль 320 навигации в физической среде может также использовать фильтрацию для оценки погрешности и/или шумов для последующих стадий расчета положения транспортного средства и обновления. Например, используя информацию одометра, модуль 320 навигации в физической среде определяет расстояние, пройденное промышленным транспортным средством из его предыдущего положения, с учетом погрешностей положения, определяемых моделью шумов одометра. После соответствующего обращения к карте физической среды и после сравнения с картой другой информации датчиков (например, лазерного дальномера, камеры) модуль 320 навигации определяет более точно текущее положение транспортного средства и обновляет погрешность положения.
В соответствии с некоторыми вариантами модуль 320 навигации в физической среде содержит команды, исполняемые процессором, для определения местонахождения промышленного транспортного средства 102 с использованием отличительных ориентиров. В некоторых вариантах модуль 320 навигации в физической среде определяет отличительный ориентир (например, одну из единиц 114 хранения или один из маркеров 116 фигуры 1), соответствующий определенной части или зоне физической среды. Модуль 320 навигации в физической среде может оценить исходное положение транспортного средства, используя ранее размещенный объект, местонахождение которого известно (например, установленный продукт или поддон), или установленный ориентир (например, маркер, такой как отражающий навигационный маячок). Используя информацию 312 деталей объекта, модуль 320 навигации в физической среде обновляет информацию 310 карты, включая в нее ранее размещенный объект, местонахождение которого известно, или свободное место на стеллаже, на котором нет такого объекта.
На фигуре 4 приведена функциональная блок-схема системы 400 определения точного местонахождения промышленного транспортного средства по одному или нескольким вариантам. Система 400 содержит мобильный компьютер 104, который соединен с промышленным транспортным средством, таким как вильчатый погрузчик, а также с группой 108 датчиков. Различные программные модули в мобильном компьютере 104 вместе формируют модуль навигации в физической среде (например, модуль 320 навигации фигуры 3).
Мобильный компьютер 104 содержит различные программные модули (компоненты) для выполнения функций навигации, такие как модуль 402 определения местонахождения, модуль 404 карты, модуль 408 коррекции и контроллер 410 транспортного средства. Мобильный компьютер 104 обеспечивает определение точных координат промышленного транспортного средства и обновляет информацию 406 карты данными, полученными из информации измерений датчиков. Модуль 402 определения местонахождения содержит разные компоненты, такие как фильтр 414 и модуль 416 извлечения деталей. Модуль 404 карты содержит различную информацию, такую как положение 418 транспортного средства и динамические детали 422. Модуль 404 карты также содержит различные компоненты, такие как модуль 420 отбора деталей.
В некоторых вариантах модуль 402 определения местонахождения обрабатывает скорректированную информацию датчиков, поступающую из модуля коррекции, и уточняет измерения положения транспортного средства. После сравнения этих измерений положения с расчетным положением фильтр 414 обновляет расчетное положение с учетом ошибок расчетов и/или погрешностей измерений. Фильтра 414 определяет положение 418 транспортного средства и передает эту информацию в модуль 404 карты. Положение 418 транспортного средства, воспроизводимое фильтром 414, включает данные (например, координаты), указывающие местонахождение транспортного средства и/или его ориентацию. Модуль 402 определения местонахождения передает информацию, связанную с положением 418 транспортного средства в модуль 404 карты, а также в контроллер 410 транспортного средства. На основе информации о местонахождении и ориентации транспортного средства контроллер 410 осуществляет его навигацию к месту назначения.
В дополнение к фильтру 414 для вычисления положения 418 транспортного средства модуль 414 определения местонахождения также содержит модуль 416 извлечения деталей для определения известных стандартных деталей по откорректированной информации датчиков. Модуль 420 отбора деталей сравнивает положение 418 транспортного средства с информацией карты для выбора сегмента карты (сегмент 352 карты фигуры 3), который находится рядом с транспортным средством. Модуль отбора деталей осуществляет отбор из имеющихся динамических деталей 422 и статических деталей 424, чтобы модуль 402 определения местонахождения использовал меньше деталей, путем исключения из массива деталей 422 и 424 тех деталей, которые скорее всего не будут видны с транспортного средства. Модуль 420 отбора деталей управляет добавлением динамических деталей 422 к информации 406 карты и их модификацией. Модуль 420 отбора деталей может обновлять информацию 406 карты для указания зон, недавно занятых некоторыми деталями или освобожденных от этих деталей, таких как известные размещенные или отобранные единицы хранения.
Следует понимать, что в системе 400 для выполнения задачи навигации в физической среде может использоваться несколько вычислительных устройств. Любые программные модули вычислительного устройства 104 могут использоваться в разных физических аппаратных компонентах, таких как другие вычислительные устройства. Например, модуль 404 карты может выполняться на сервере (например, на центральном компьютере 106 фигуры 1) с использованием сети (например, по сети 302 фигуры 4) для соединения с множеством мобильных вычислительных устройств для совместного использования информации 406 карты и ее обновления текущим местонахождением транспортного устройства и его ориентацией.
В некоторых вариантах модуль 402 коррекции обрабатывает входные сообщения датчиков, поступающие от различных источников информации, таких как группа 108 датчиков с разными временами выборки и передачи информации, относящейся к положению 418 транспортного средства, а также с разными задержками. Модуль 402 коррекции извлекает из этих сообщений информацию измерений, относящуюся к положению транспортного средства. Модуль 402 коррекции проверяет отдельно каждое сообщение для обеспечения корректности каждого измерения. Такая проверка может выполняться вместо объединения информации датчиков для предотвращения каких-либо ошибок счисления пути. Из-за разных интервалов выборки и системных задержек порядок, в котором получены измерения, записанные во входных сообщениях датчиков, отличается от порядка, в котором они становятся доступными вычислительному устройству 104.
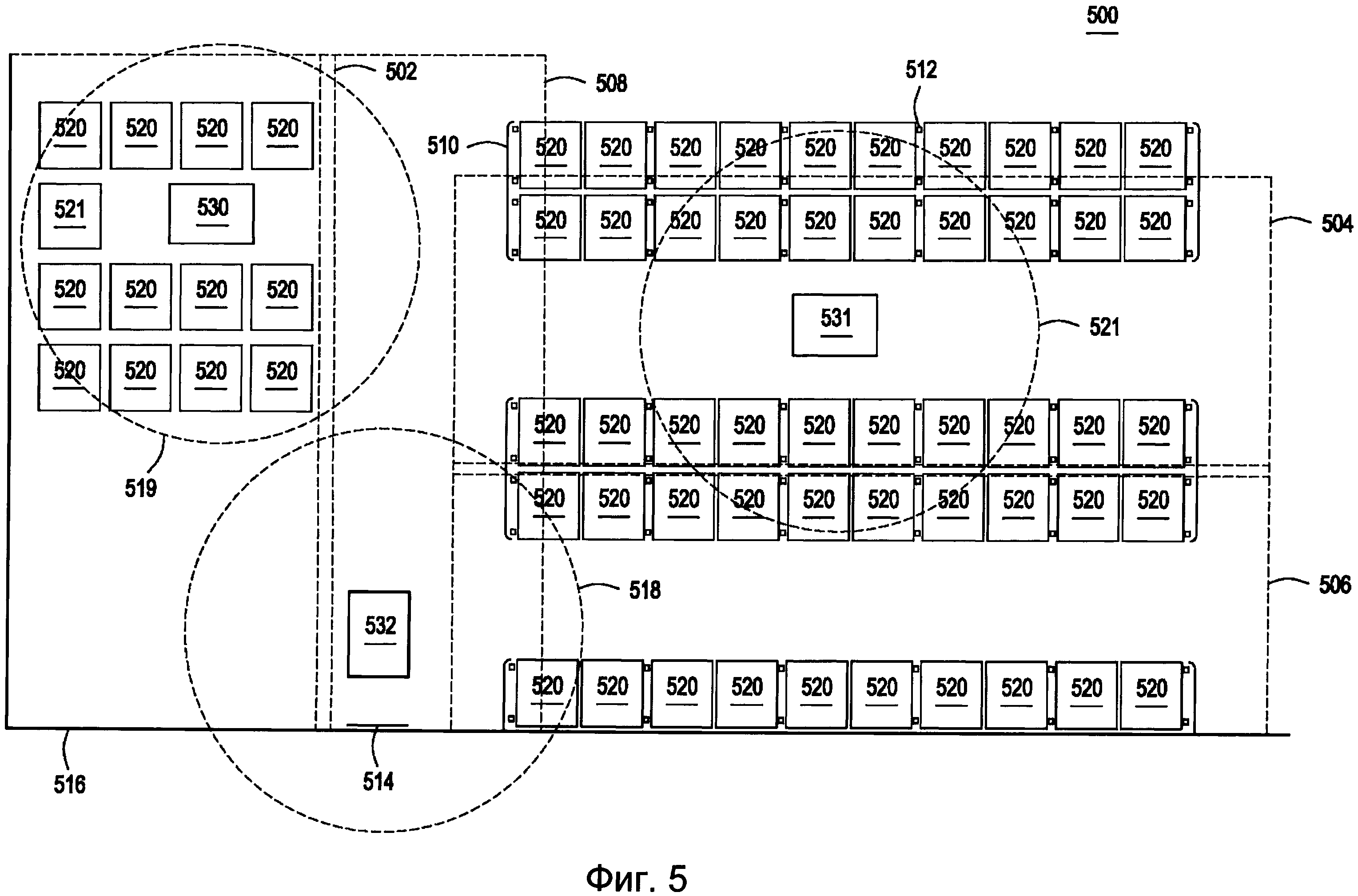
На фигуре 5 приведен пример карты 500 физической среды, содержащей ранее размещенные объекты, местонахождение которых известно, и отличительные ориентиры по одному или нескольким вариантам осуществления изобретения. Карта 500 разделена на сегменты 502, 504, 506 и 508, которые представляют разные ситуации начала работы, способы разрешения которых описаны ниже. На карте 500 указаны три промышленных транспортных средства 530, 531 и 532 (например, промышленные транспортные средства 102 фигуры 1), расположенные в сегментах 503, 504 и 508 карты. В начале работы промышленное транспортное средство 530/531/532 не имеет никакой информации о своем положении или о сегменте карты, в котором оно находится. Датчики (например, лазерные сканеры), соединенные с промышленным транспортным средством 102, осуществляют измерения в пределах дальности 518. Физическая среда (например, физическая среда 100 на фигуре 1) также содержит стационарные ориентиры, такие как стенки 516, ограждения 510 стеллажей, опоры 512 стеллажей и установленный отличительный навигационный маркер 514. Физическая среда также содержит множество ранее размещенных объектов 520 и 521, местонахождение которых известно и для которых модуль навигации в физической среде, например модуль навигации 320 фигуры 3, может получить информацию положения от управляющей программы карты (например, от управляющей программы 340 карты фигуры 3).
В одном из вариантов в начале работы промышленное транспортное средство 532 определяет детали в пределах дальности 518, причем транспортное средство 532 осуществляет измерения отличительного навигационного маркера 514. Маркер 514 представляет собой навигационный маячок (например, один из навигационных маячков 116 на фигуре 1) и может содержать различные типы геометрических маркеров. В некоторых вариантах маркер 514 представляет собой навигационный маячок, имеющий отражающую часть (например, отражающую поверхность), которая может быть идентифицирована с помощью лазерного сканера (например, лазерного сканера 204 на фигуре 2). Вместо отражающей части маркер 514 может содержать двухмерный штрихкод, который может быть извлечен с использованием средств обработки изображений. Маркер 514 может представлять собой уникальное сочетание деталей, отличающееся от любого другого маркера. В некоторых вариантах в качестве искусственных навигационных маячков используются отражатели, которые могут быть отличительными ориентирами для определения местонахождения относительно обзорной карты в начале работы. Лазерный сканер возвращает информацию об интенсивностях, связанных с отражателями, в процессе сканирований, когда лазерный луч взаимодействует с объектом, коэффициент отражения которого превышает определенную пороговую величину. Таким образом, если маркер 512 представляет собой отражатель, то он легко может быть выявлен в информации лазерного сканирования. При обнаружении отличительного маркера модуль навигации в физической среде (например, модуль 320 навигации фигуры 3) обращается к информации маркеров (например, к информации 348 маркеров фигуры 3) для получения местонахождения навигационного ориентира. Затем модуль навигации в физической среде использует информацию измерений положения для ориентира (например, информацию 316 измерений положения фигуры 3) для получения информации расчетного исходного положения (например, информации 344 расчетного исходного положения) для промышленного транспортного средства. Используя исходное положение, модуль навигации в физической среде задает текущую зону в качестве зоны 508 и получает сегмент карты для этой зоны (например, сегмент 352 карты фигуры 3). Затем модуль навигации в физической среде уточняет положение, используя наблюдаемые детали в этой зоне, такие как стенка 516 и ограждения 510 стеллажей. Уточненное положение будет использоваться в качестве нового положения, и промышленное транспортное средство будет находиться в состоянии, из которого может осуществляться его надежная навигация для выполнения задач.
В другом варианте промышленное транспортное средство 530 при выполнении сканирования внешней обстановки в режиме начала работы в пределах дальности 519 сканирования обнаруживает некоторое количество ранее размещенных объектов 520 и 521, местонахождение которых известно. Эти объекты распознаются путем сравнения информации сканирования с информацией ранее размещенных объектов (например, с информацией 342 ранее размещенных объектов фигуры 3). Промышленное транспортное средство 530 определяет, что оно находится в ряду продуктов, путем сравнения относительного положения измеренных деталей с моделью (описанием) рядов штабелированных объектов, обеспечиваемой как часть обзорной карты (например, обзорной карты 350 фигуры 3). Промышленное транспортное средство может находиться в любом из множества рядов штабелированной продукции, и исходные данные недостаточны для определения точного местонахождения. Промышленное транспортное средство определяет путем анализа обзорной карты, что ряды штабелированной продукции находятся в сегменте 502 карты 500. Затем промышленное транспортное средство считывает информацию сегмента 502 карты. Промышленное транспортное средство отбирает подходящий ряд штабелированной продукции, используя информацию о размещенных продуктах, которая соответствует информации деталей, полученной от лазерных сканеров. Координаты этого подходящего ряда могут быть неточными, но они обеспечивают положение, из которого можно осуществлять навигацию в такое место, в котором можно уточнить координаты транспортного средства. Промышленное транспортное средство определяет свое расчетное исходное положение (например, определяет информацию 344 расчетного исходного положения фигуры 3). Затем промышленное транспортное средство запускает задачу начала работы, связанную с зоной штабелированной продукции (например, задачу 330 фигуры 3) для перемещения транспортного средства для сканирования продукта 521. Ранее размещенный объект 521, местонахождение которого известно, может быть идентифицирован однозначным образом с помощью штрихкодов, радиометок, специальной формы или иных уникальных характеристик, которые могут быть измерены датчиками промышленного транспортного средства. Промышленное транспортное средство идентифицирует продукт 521 с помощью сканера штрихкодов. В другом варианте промышленное транспортное средство может сканировать радиометку, распознавать продукт по его изображению, по этикетке на изображении продукта или же может использовать другие средства идентификации, известные специалистам в данной области техники. Промышленное транспортное средство 530 считывает координаты продукта 521 из информации ранее размещенных объектов (например, из информации 342 ранее размещенных объектов фигуры 3). В другом варианте промышленное транспортное средство может запрашивать координаты ранее размещенного объекта 521 у внешней системы, такой как система управления складом. После того как промышленное транспортное средство получит координаты ранее размещенного объекта 521, выполняется новый расчет положения транспортного средства в начале работы с использованием координат объекта.
В другом варианте промышленное транспортное средство 531 определяет, что оно находится в проходе между стеллажами, путем сравнения деталей, полученных в результате измерений, с моделью прохода, имеющейся в обзорной карте (например, в обзорной карте 350 фигуры 3), в частности, путем сравнения с ранее размещенными продуктами 520, местонахождение которых известно, и опорами 512 стеллажей, находящихся в пределах дальности 521 сканирования. Промышленное транспортное средство 531 не может определить однозначно координаты по результатам начального сканирования, однако может получить примерную оценку положения, которая достаточна для надежной навигации к определенному, ранее размещенному объекту 520, местонахождение которого известно, или к одному из концов прохода между стеллажами. Промышленное транспортное средство 531 запускает задачу движения в выбранное положение. Если выбранное положение используется для сканирования ранее размещенного объекта, его координаты используются для уточнения положения в начале работы, как это уже указывалось. В другом варианте, если выбранным положением является конец прохода между стеллажами, то промышленное транспортное средство может распознавать ограждения 510 стеллажей, на которых может быть расположен отличительный навигационный маркер, и уточнить свое положение в начале работы, используя отличительный навигационный маркер, как это уже указывалось.
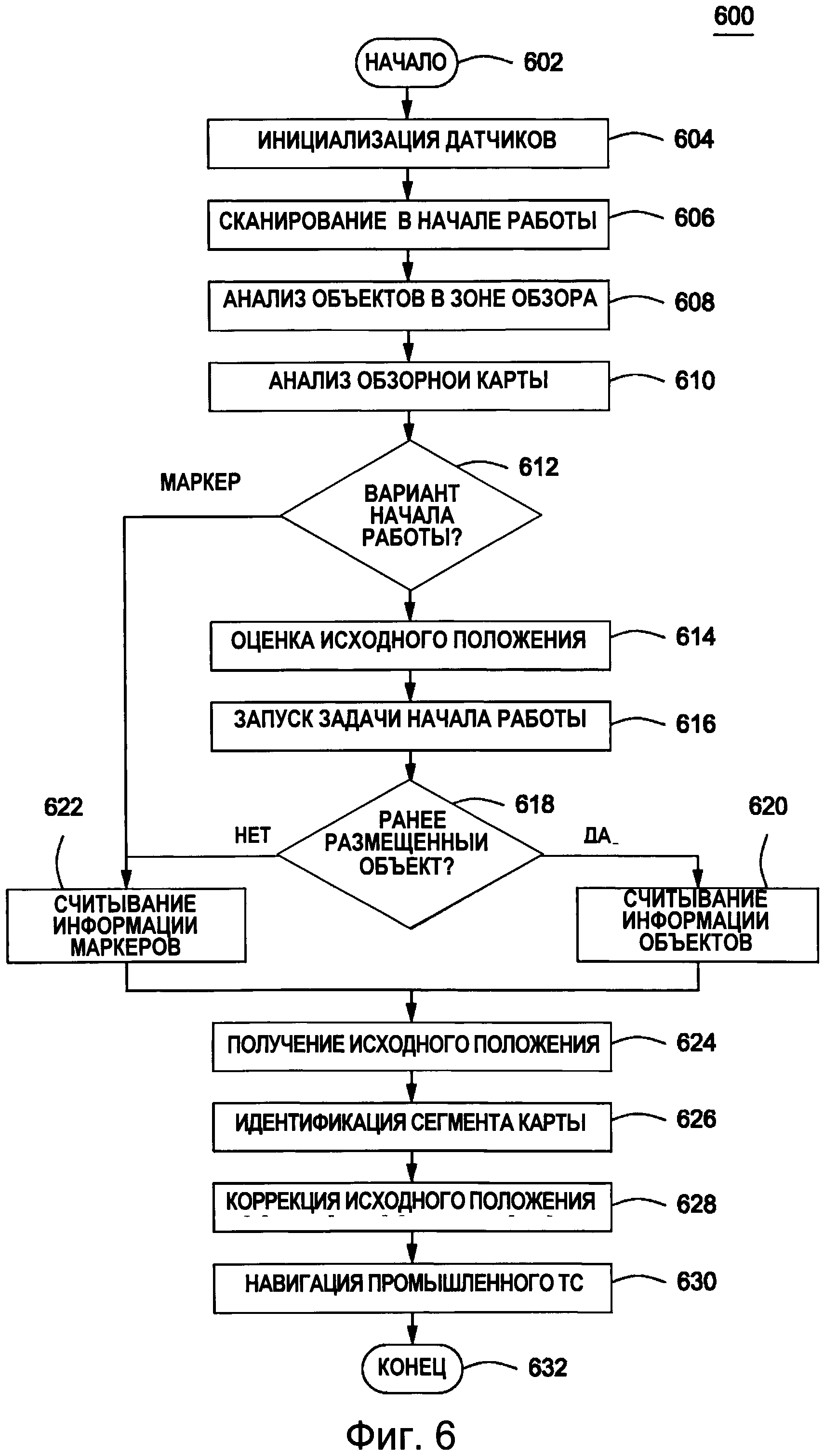
На фигуре 6 приведена блок-схема способа 600 определения в начале работы местонахождения промышленного транспортного средства относительно обзорной карты по одному или нескольким вариантам. В некоторых вариантах все стадии способа 600 выполняет модуль навигации в физической среде (например, модуль 320 навигации в физической среде фигуры 3). В других вариантах некоторые стадии могут быть пропущены. Модуль навигации в физической среде записан в мобильном компьютере (например, в мобильном компьютере 104 фигуры 1), который функционально соединен с промышленным транспортным средством (например, с промышленным транспортным средством 102 фигуры 1). Центральный компьютер (например, центральный компьютер 106 фигуры 1) содержит управляющую программу (например, управляющую программу 328 фигуры 3) для обмена информацией с промышленным транспортным средством, а также с другими транспортными средствами. В процессе выполнения задачи (например, задачи 330 фигуры 3) команды на выполнение задачи поступают от менеджера задач. Например, менеджер задач может передавать команды в модуль навигации в физической среде для навигации промышленного транспортного средства по определенному маршруту. Выполнение способа 600 начинается на стадии 602 и продолжается на стадии 604.
На стадии 604 инициируются датчики, необходимые для обеспечения навигации. На стадии 606 модуль навигации в физической среде (например, модуль 320 навигации фигуры 3) получает информацию сканирования от присоединенных датчиков. Сканирование в режиме начала работы может повторяться для выполнения нескольких сеансов сканирования для получения информации сканирования. На стадии 608 осуществляется оценка информации, полученной в процессе сканирования в режиме начала работы, для извлечения деталей объектов в пределах дальности сканирования и идентификации ориентиров по деталям, включая извлечение отражающих маячков, ранее размещенных объектов, местонахождение которых известно, и других объектов, которые могут использоваться в целях навигации. На стадии 610 проверяется информация обзорной карты (например, информация 350 обзорной карты фигуры 3) для связывания извлеченных объектов с множеством объектов, подходящих для определения местонахождения. На стадии 612 осуществляется оценка варианта начала работы. Если идентифицирован штрихкод или другой отличительный маркер (ориентир), следует переход на стадию 622, в противном случае - на стадию 614.
На стадии 614 определяется примерное исходное положение, которое является одним из множества возможных положений, получаемых на основе варианта, определенного по результатам сканирования в режиме начала работы и из обзорной карты. На стадии 616 запускается задача режима начала работы, связанная с идентифицированным вариантом, для навигации промышленного транспортного средства в положение, из которого может быть получено его уточненное положение. В результате выполнения этой задачи транспортное средство перемещается в заданное положение и получает новые данные по ориентирам. На стадии 618 определяется, нужно ли получать уточненное положение на основе ранее размещенного объекта, местонахождение которого известно, или на основе отличительного ориентира. Если для этой цели должен использоваться ранее размещенный объект, следует переход на стадию 620. Если для этой цели должен использоваться отличительный ориентир, выполняется переход на стадию 622. На стадии 620 обеспечивается получение информации о ранее размещенном объекте, в частности его положения на обзорной карте. На стадии 622 обеспечивается получение информации о конфигурации отличительного ориентира, включая его положения на обзорной карте.
На стадии 624 определяется новое исходное положение путем вычисления положения транспортного средства относительно полученного положения ориентира. На стадии 626 определяется сегмент карты, в котором находится промышленное транспортное средство. На стадии 628 осуществляется коррекция исходного положения с использованием оценки других деталей, имеющихся на сегменте карты, и сравнения их с информацией, полученной от датчиков транспортного средства. На стадии 630 осуществляется навигация промышленного транспортного средства в соответствии с одной или несколькими назначенными задачами. Выполнение способа 600 заканчивается на стадии 632.
Различные элементы, устройства и модули раскрыты в настоящем описании в связи с их соответствующими функциями. Эти элементы, устройства и модули являются средствами выполнения соответствующих вышеописанных функций.
Хотя все вышеизложенное относится к некоторым вариантам осуществления настоящего изобретения, однако могут быть предложены и другие варианты, не выходящие за пределы объема изобретения, который определяется прилагаемой формулой.
Улучшенный способ и система обработки информации карт для навигации промышленных транспортных средств
Способ и система определения точного местонахождения промышленного транспортного средства
Способ и устройство, позволяющее использовать объекты с предварительно установленными координатами для определения местоположения промышленных транспортных средств
Система навигации вильчатых погрузчиков
Способ и система для совместного использования информации карт, связанной с автоматическими промышленными транспортными средствами
Многорежимное навигационное управление движением транспортного средства
Система управления навигацией транспортного средства (варианты) и транспортное средство на ее основе (варианты)
Улучшенный способ и система обработки информации карт для навигации промышленных транспортных средств
Способ и система определения точного местонахождения промышленного транспортного средства
Способ и устройство, позволяющее использовать объекты с предварительно установленными координатами для определения местоположения промышленных транспортных средств
Система навигации вильчатых погрузчиков
Способ и система для совместного использования информации карт, связанной с автоматическими промышленными транспортными средствами
Многорежимное навигационное управление движением транспортного средства
Система управления навигацией транспортного средства (варианты) и транспортное средство на ее основе (варианты)
Промышленные транспортные средства, местоположение которых определяется по плафонам верхнего освещения

